汽车工程 ›› 2023, Vol. 45 ›› Issue (8): 1428-1437.doi: 10.19562/j.chinasae.qcgc.2023.08.013
所属专题: 智能网联汽车技术专题-规划&决策2023年
吴新政,邢星宇,刘力豪,沈勇,陈君毅( )
)
Xinzheng Wu,Xingyu Xing,Lihao Liu,Yong Shen,Junyi Chen()
摘要:
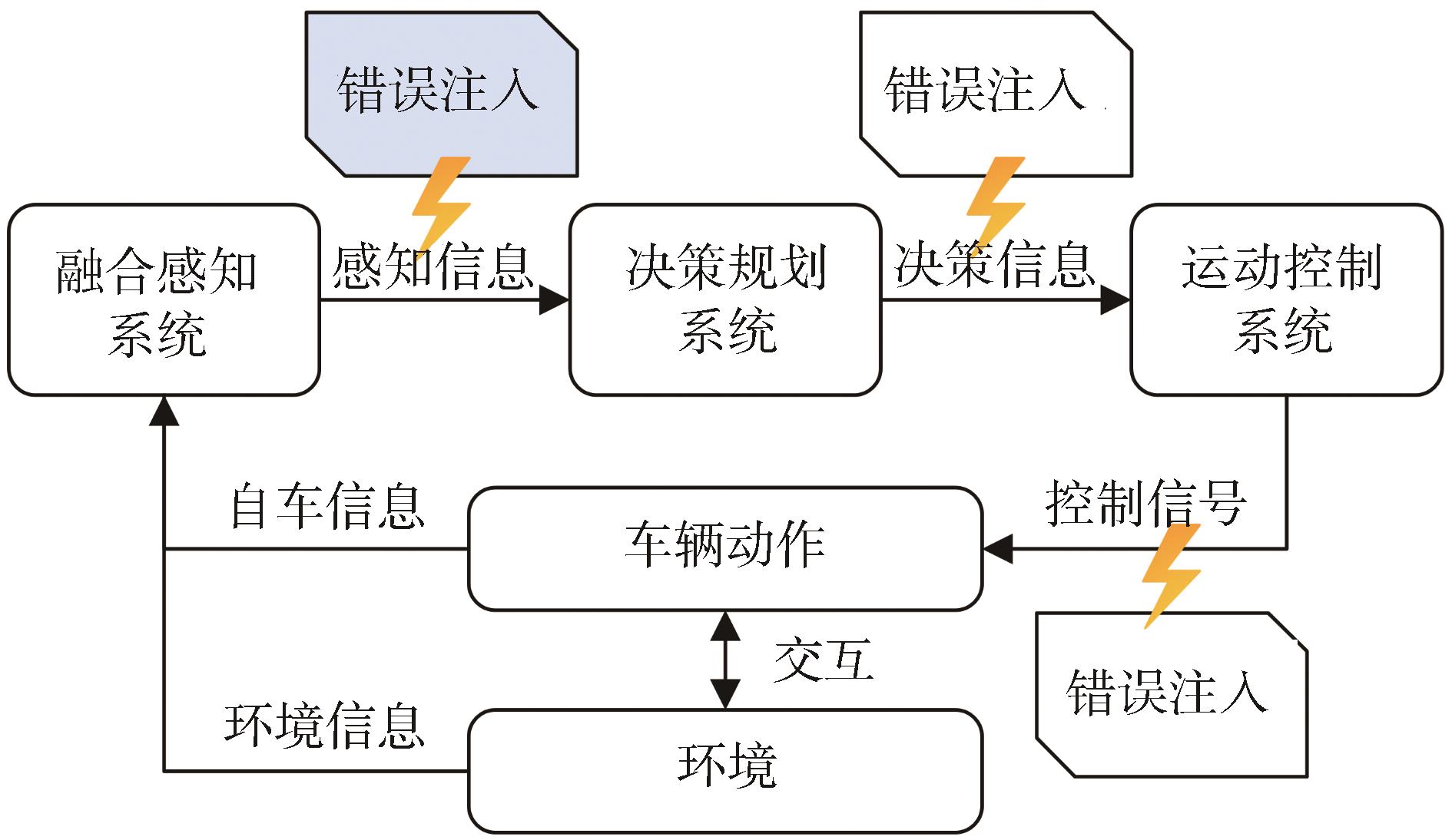
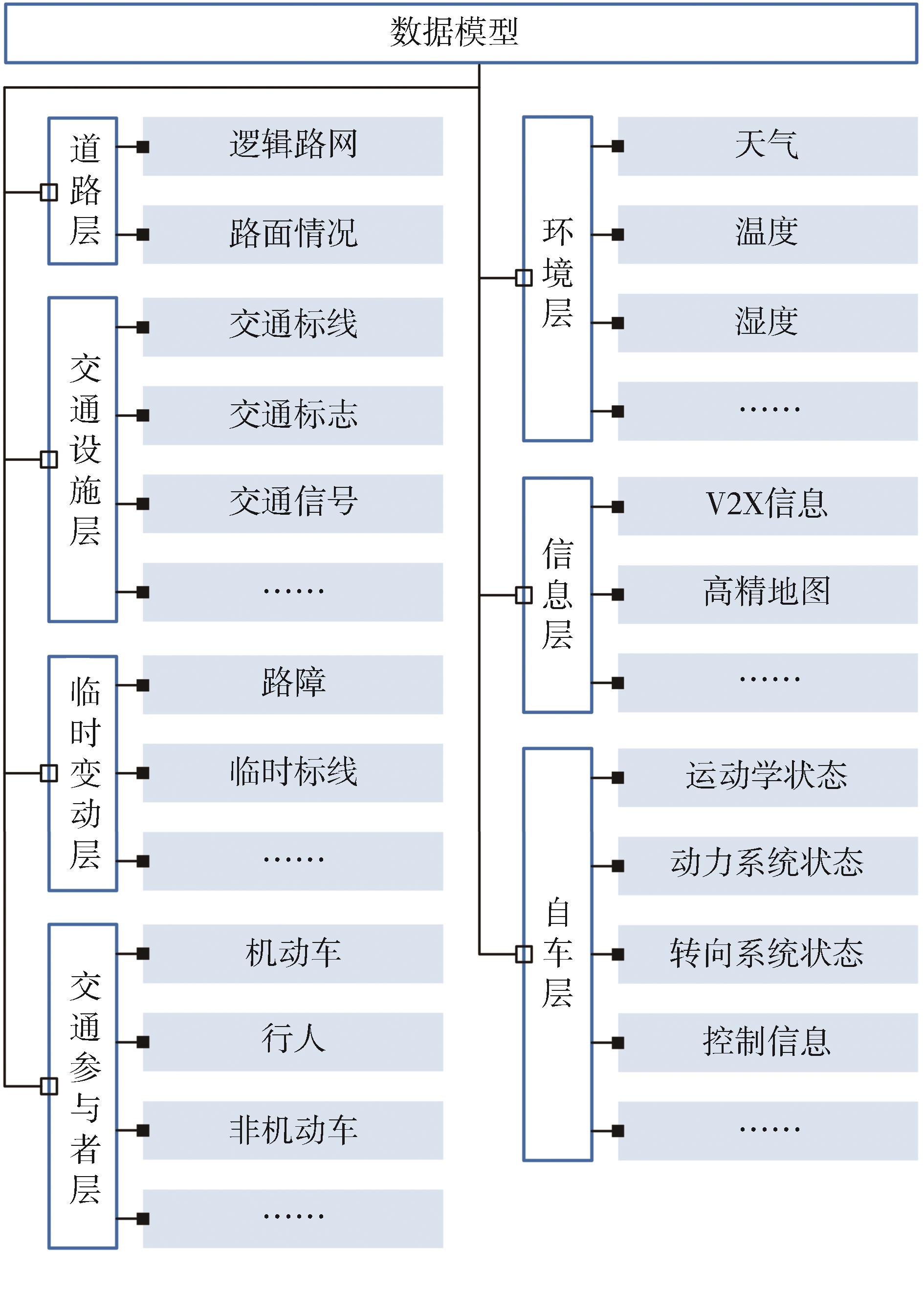
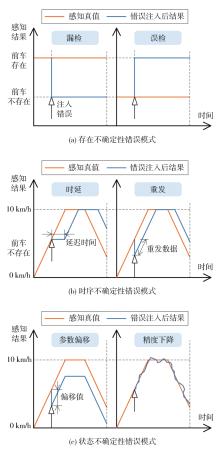
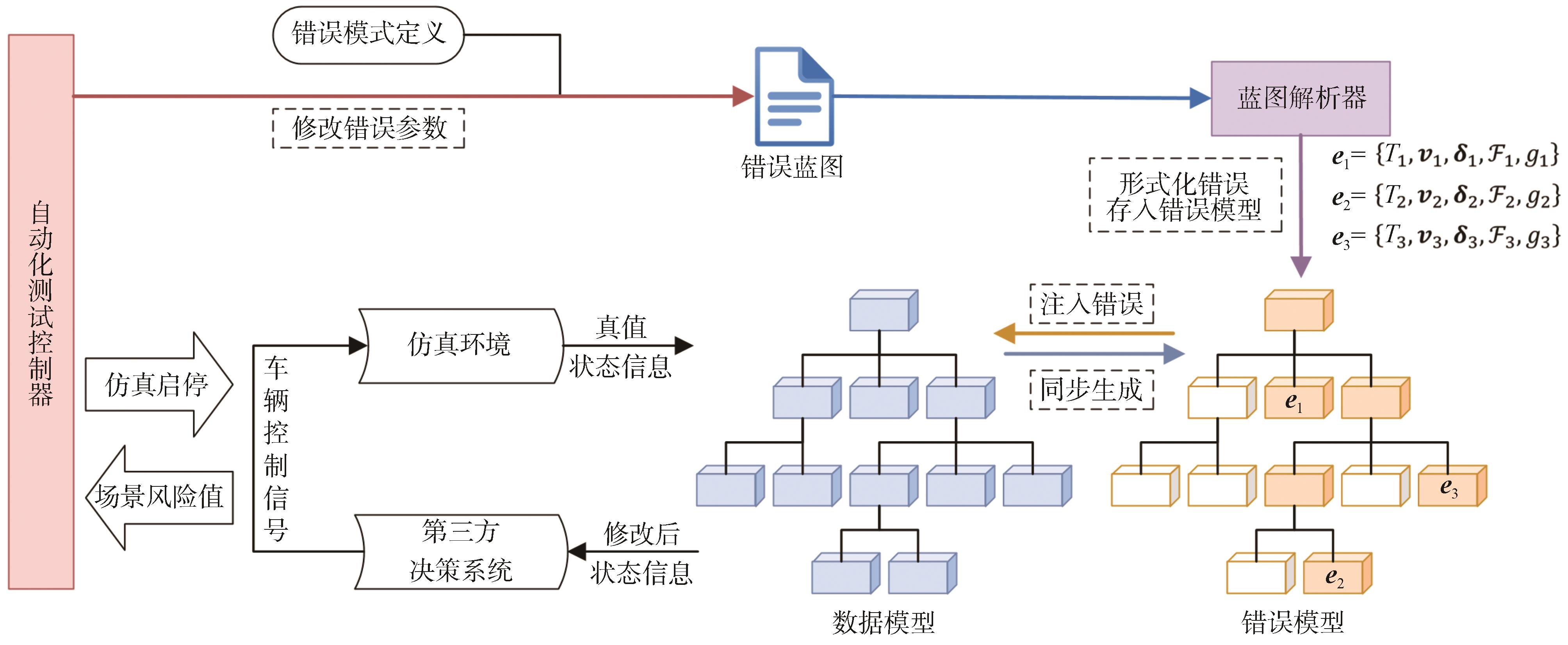
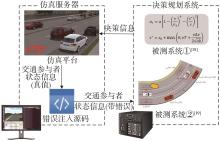
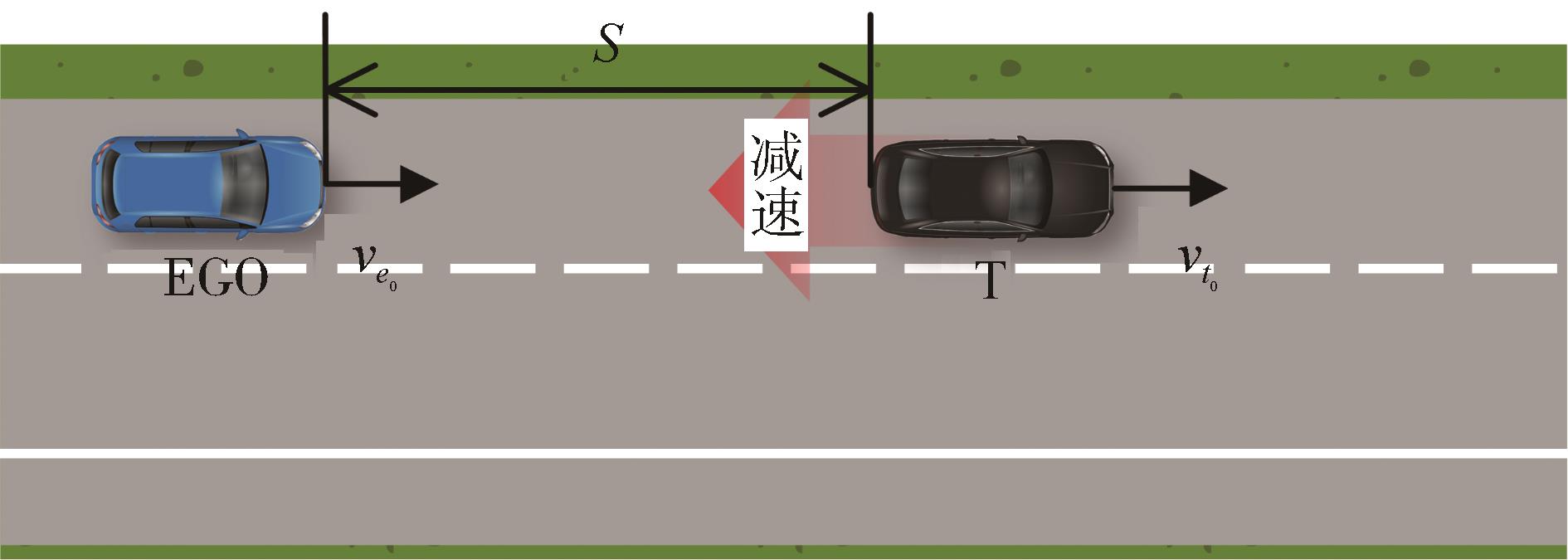
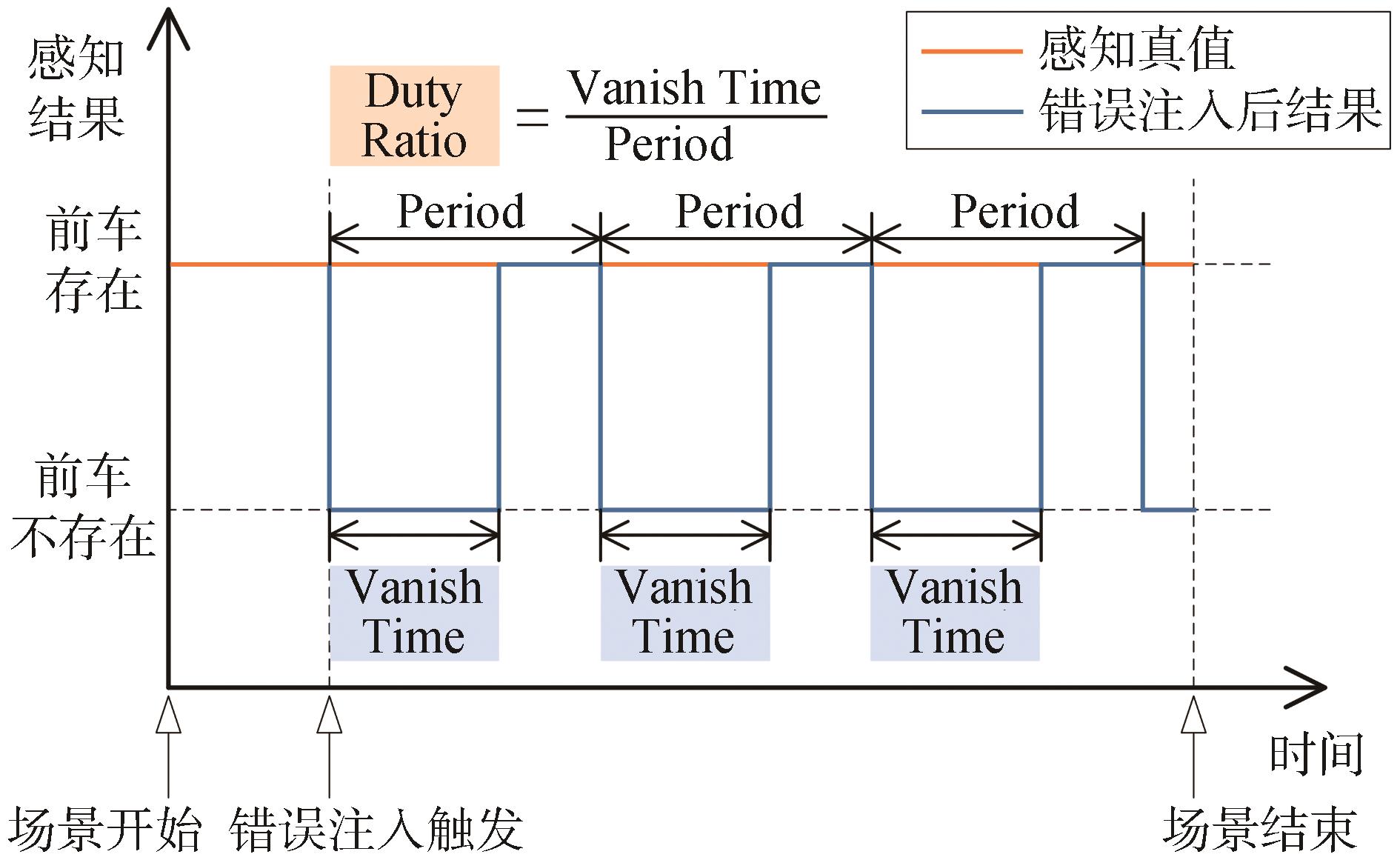
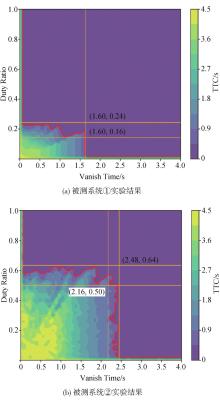
自动驾驶系统的运行环境复杂多样。考虑到传感器本身的性能局限及感知算法在特定触发条件下的功能不足,自动驾驶系统上游感知结果不可避免地会出现错误。因此针对自动驾驶决策规划系统在上游数据错误情况下的抗扰性测试对保证自动驾驶安全性至关重要。为此,本文首先提出基于6层场景本体模型的数据模型和包含4类不确定性错误模式的错误模型,并进一步构建了一个通用的错误注入框架SOFIF以实现对上游数据的修改。最后,本文基于硬件在环仿真测试并提出危害率作为量化评价指标,对比分析了两个被测决策规划系统在存在不确定性错误模式下的抗扰性表现。实验得到两个被测系统的危害率分别为0.89和0.64,表明两被测系统的抗扰性存在较大差距,并进一步证明了SOFIF的有效性。