汽车工程 ›› 2023, Vol. 45 ›› Issue (8): 1362-1372.doi: 10.19562/j.chinasae.qcgc.2023.08.007
所属专题: 智能网联汽车技术专题-规划&决策2023年
王明,唐小林( ),杨凯,李国法,胡晓松
),杨凯,李国法,胡晓松
收稿日期:2023-03-19
修回日期:2023-05-20
出版日期:2023-08-25
发布日期:2023-08-17
通讯作者:
唐小林
E-mail:tangxl0923@cqu.edu.cn
基金资助:
Ming Wang,Xiaolin Tang(),Kai Yang,Guofa Li,Xiaosong Hu
Received:2023-03-19
Revised:2023-05-20
Online:2023-08-25
Published:2023-08-17
Contact:
Xiaolin Tang
E-mail:tangxl0923@cqu.edu.cn
摘要:
本文提出了一种考虑预测风险的自动驾驶车辆运动规划方法,该方法基于模型预测控制算法,同时融合了周围车辆未来轨迹的交互预测及其风险。首先,将车与车之间的交互建模成图结构,建立感知交互的运动预测模型;其次,训练多个同构异参的预测模型,利用集成技术来获得预测网络对于预测结果的不确定性风险;然后,基于获得的预测算法不确定性风险,利用模型预测控制算法来处理风险,通过在优化问题约束中综合考虑安全约束、车辆物理属性约束等,设计了考虑预测不确定性风险的自动驾驶运动规划方法;最后,基于真实驾驶数据集数据和SUMO仿真平台,对建立的预测模型的运动预测能力、基于模型预测控制的运动规划方法的有效性以及运动规划处理预测风险的能力进行了验证。仿真结果表明,在面对周围车辆的紧急加减速等预测风险较高的场景时,本文提出的运动规划方法能够感知到预测算法的不确定性风险并采取动作来规避风险,可提升道路驾驶安全性。
王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372.
Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk[J]. Automotive Engineering, 2023, 45(8): 1362-1372.

图1
运动规划总体方案"

表1
集成GNN训练过程伪代码"
| 输入: |
|---|
1: 使用任意权重参数 2: for 对于每一个预测网络 3: 随机打乱数据集 4: 随机更改训练随机数种子; 5: for 训练过程中的某一次迭代 6: 7: 损失值反向传播获得 8: 根据梯度 9: end 10: 获得训练好的GNN预测网络 11: end 12: 获得M个同构异参的GNN预测网络; 13: 最终预测结果: 14: 不确定性风险:∑t |
| 输出:某时刻预测结果 |
图2
轨迹跟踪误差模型"
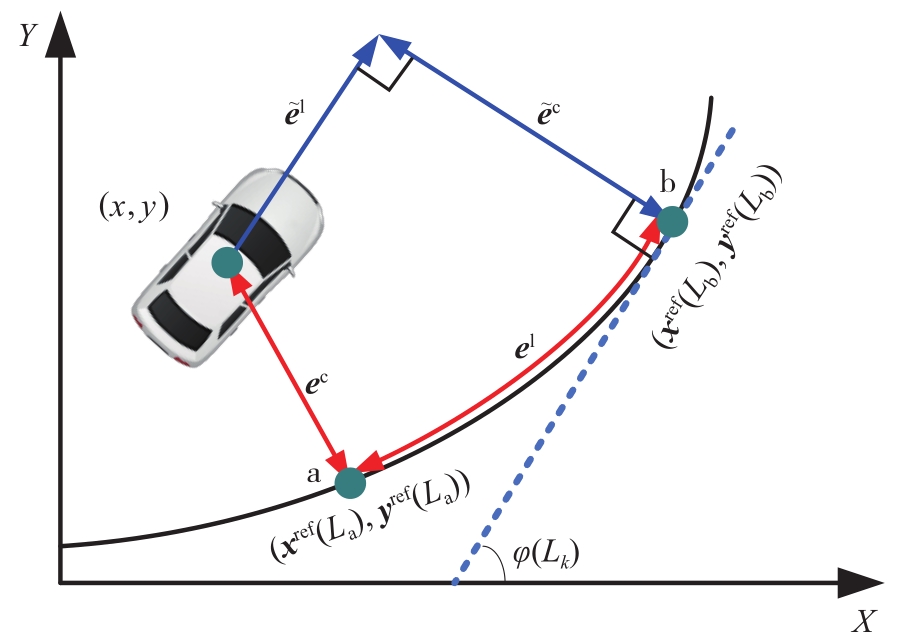
表2
被控车辆运动学与约束参数"
| 参数 | 数值 |
|---|---|
| 前轴轴距 | 1.81 m |
| 后轴轴距 | 1.33 m |
| 自车包络圆个数 | 3 |
| 包络圆半径 | 1.0 m |
| 最大车速 | 33 m/s |
| 最大加速度 | 2.8 m/s2 |
| 最大减速度 | -8 m/s2 |
| 最大转向角 | |
| 道路左、右边界 |
图3
自车及周围车辆表示方法"
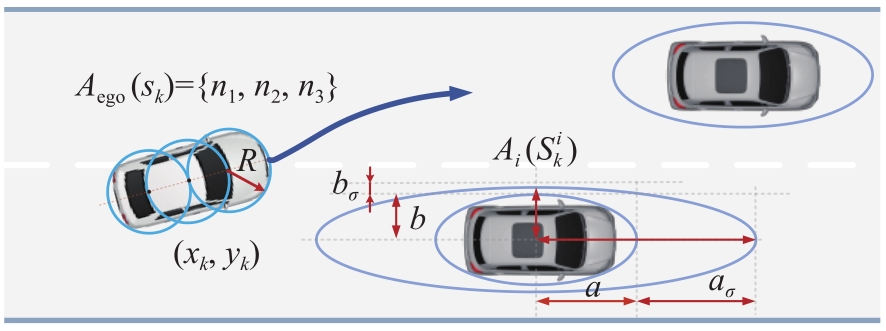
表3
MPC运动规划控制器相关参数"
| 参数 | 数值 |
|---|---|
| 预测时域 | 3 s |
| 控制时域 | 3 s |
| 控制频率 | 10 Hz |
| 轮廓误差权重 | 500 |
| 滞后误差权重 | 150 |
| 加速度权重 | 6 |
| 转向角权重 | 150 |
| 速度权重 | 2.5 |
| 松弛变量权重 | 2 800 |
| 参考线投影速度权重 | 0.01 |
表4
训练结果"
| 集成数量M | ADE@3 s/m | FDE@3 s/m |
|---|---|---|
| 1(基础模型) | 0.278 | 0.713 |
| 2 | 0.277 | 0.710 |
| 4 | 0.264 | 0.694 |
| 6 | 0.263 | 0.692 |

图4
DR_CHN_Merging_ZS 场景图"


图5
GNN预测下规划过程"


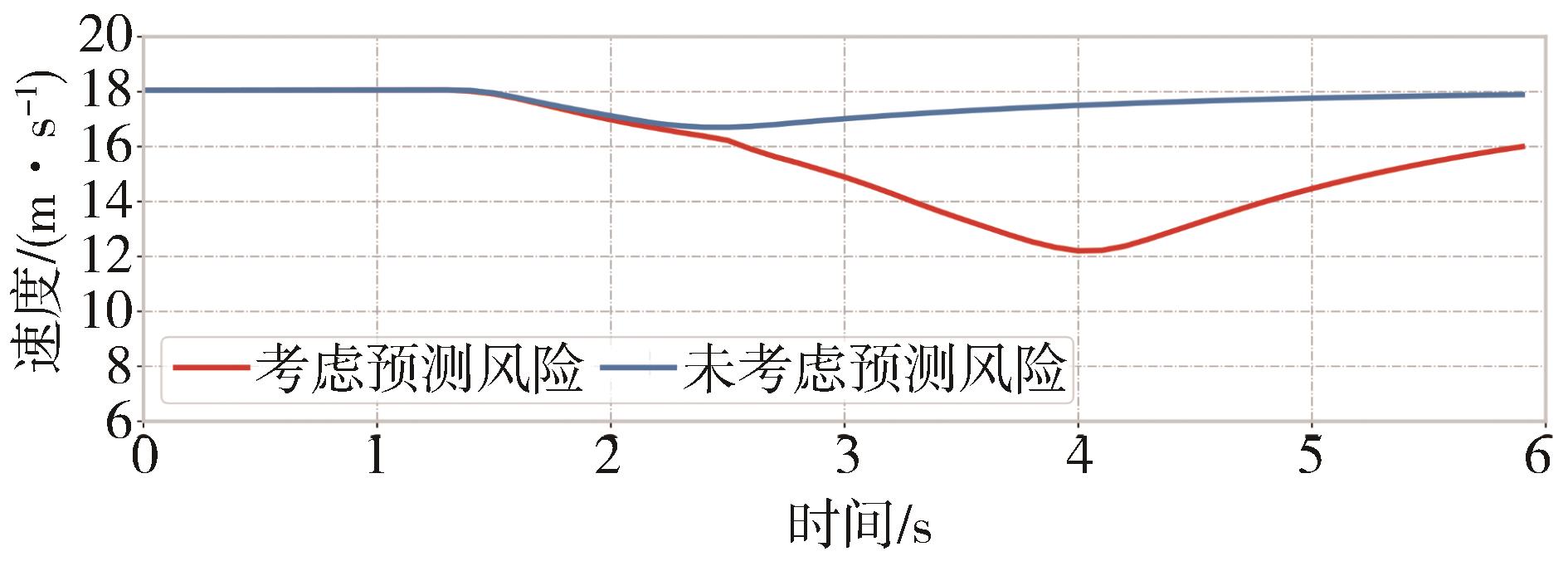
图6
两种预测方案下运动规划纵向速度对比"
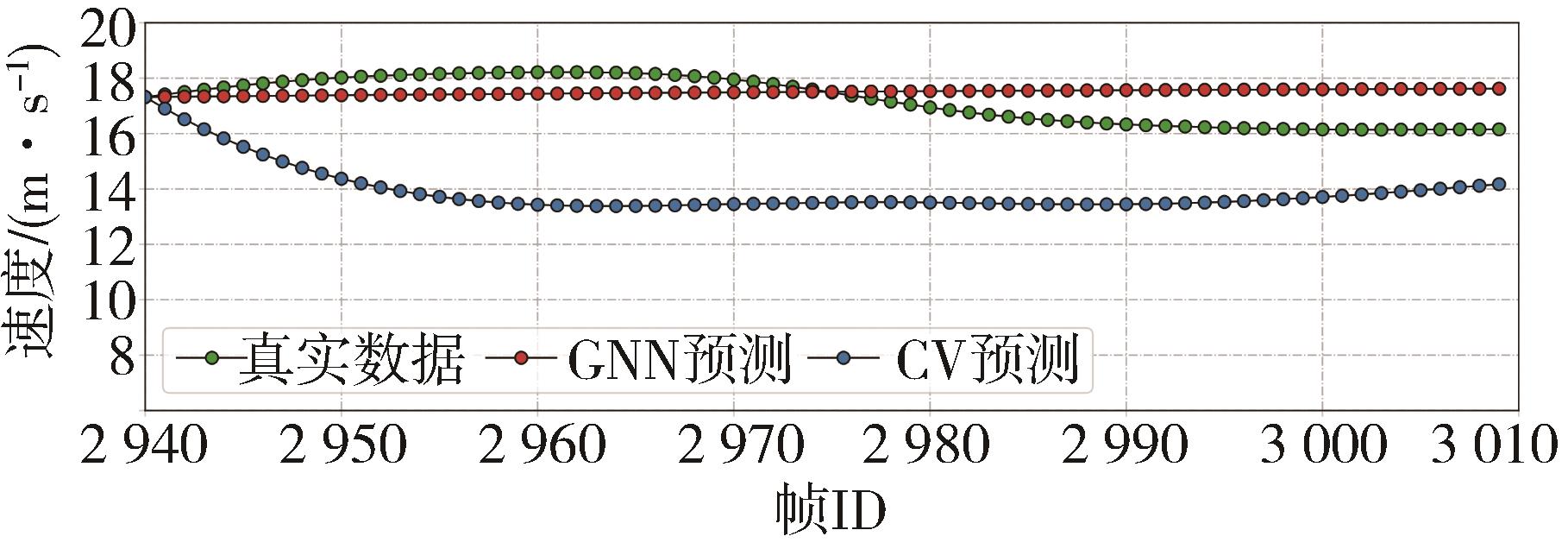
图7
两种预测方案下运动规划控制量对比结果"
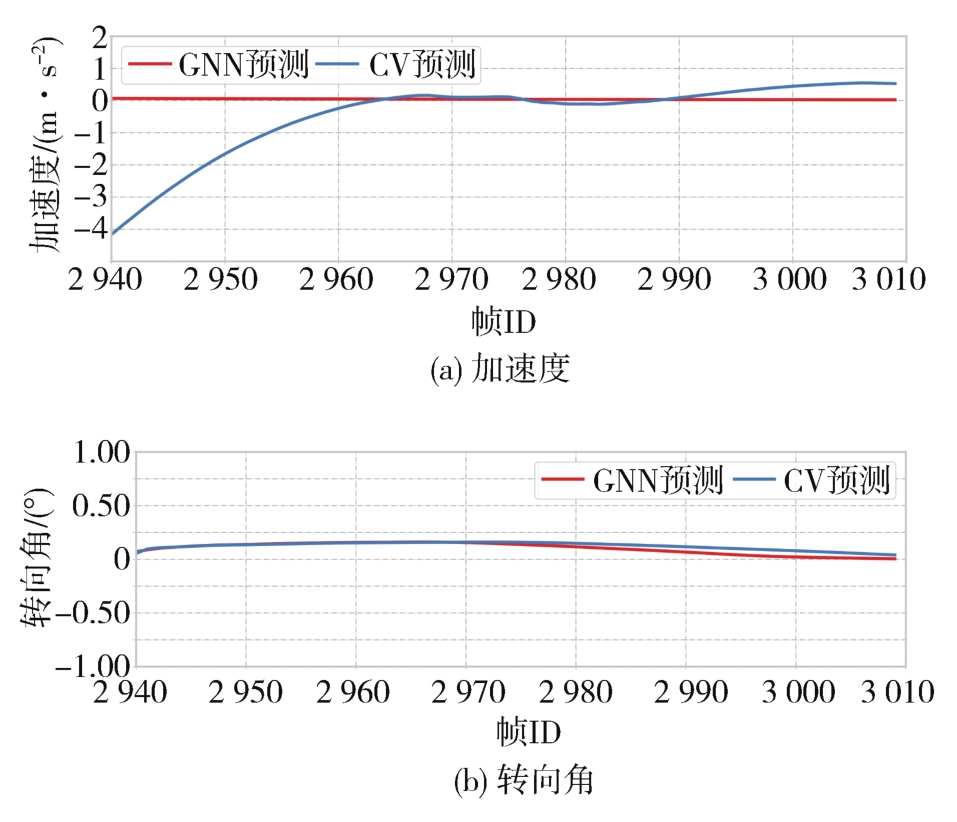

图8
高速公路直行场景"


图9
匝道汇入场景"
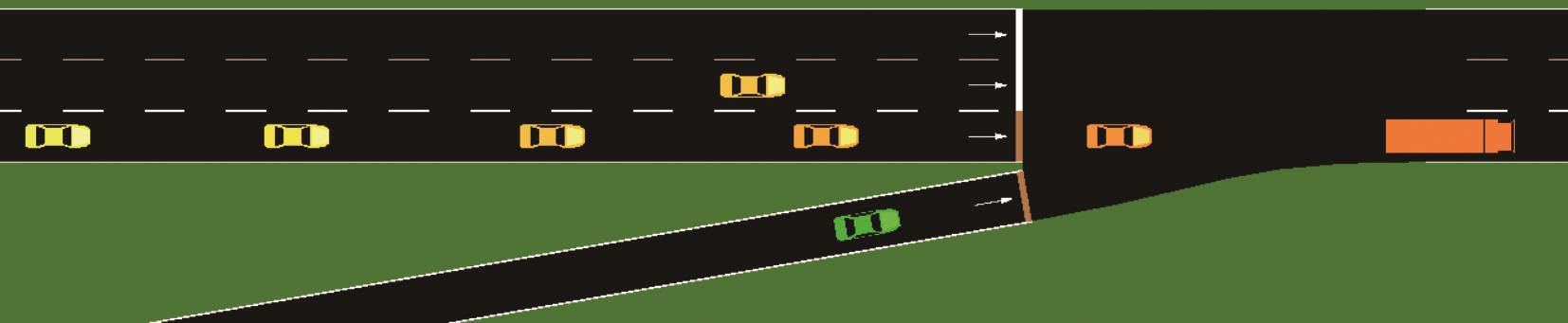
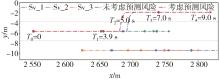
图10
行驶轨迹对比结果"
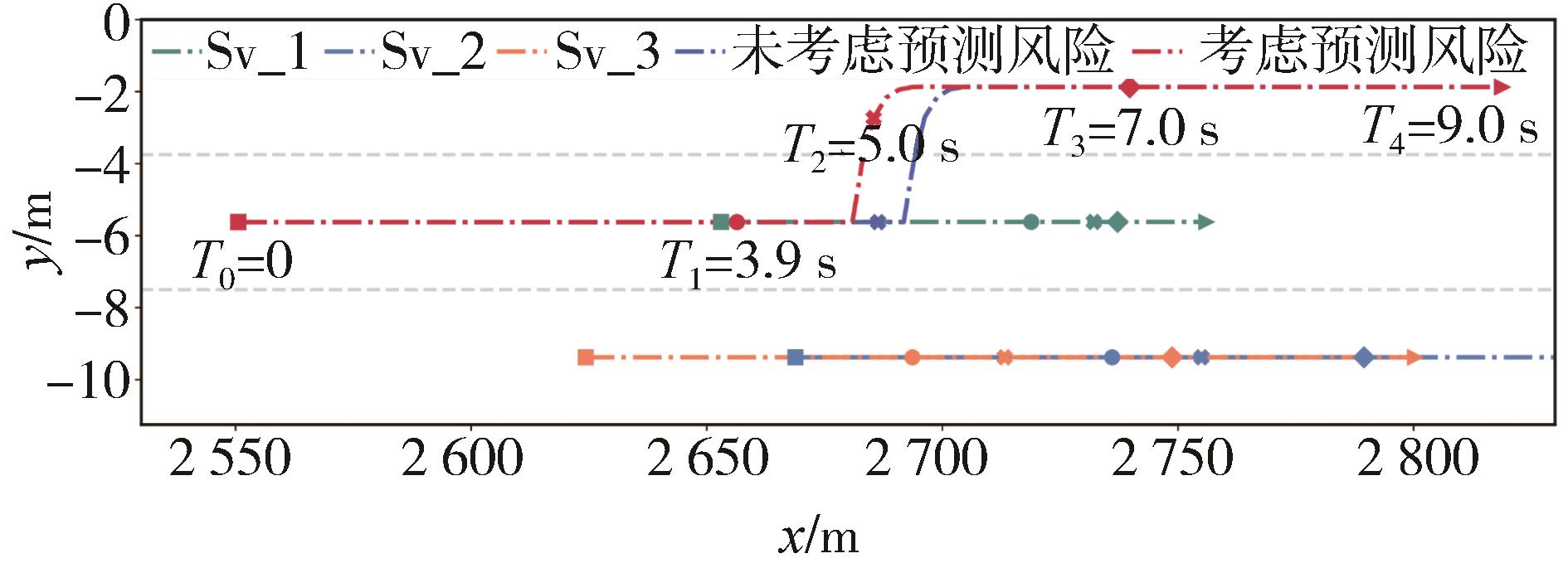
图11
故障车辆预测风险量化值"

图12
RI值对比结果"
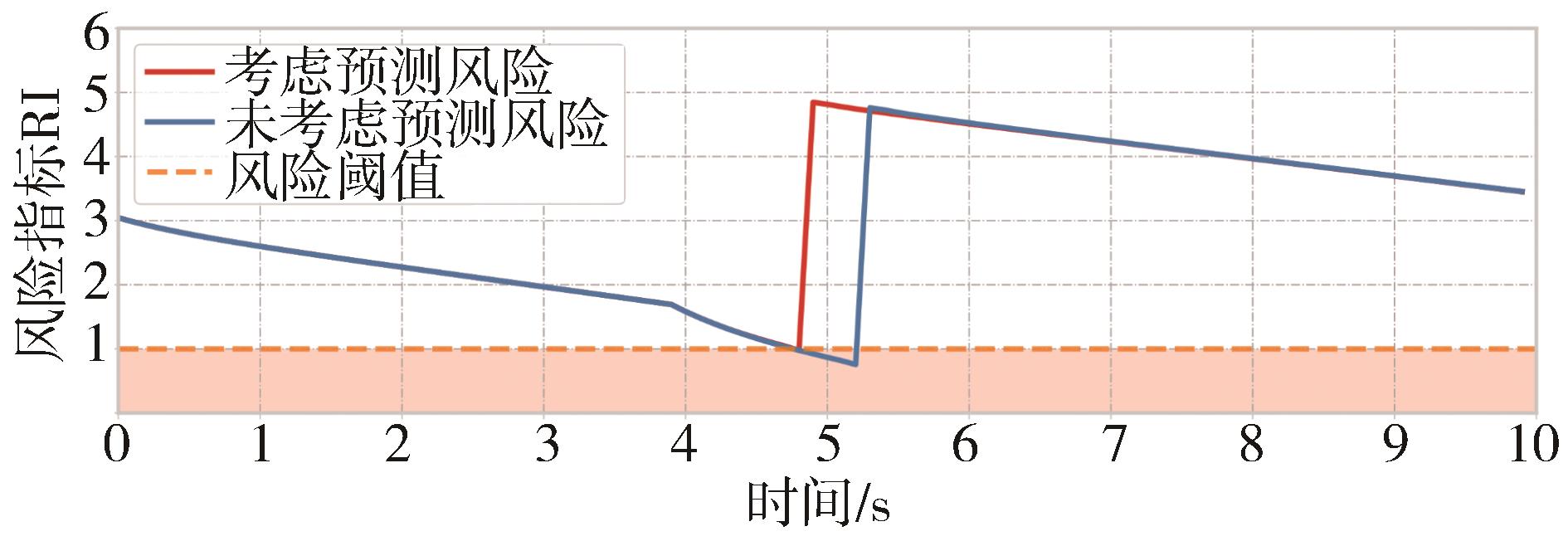
图13
纵向速度对比结果"
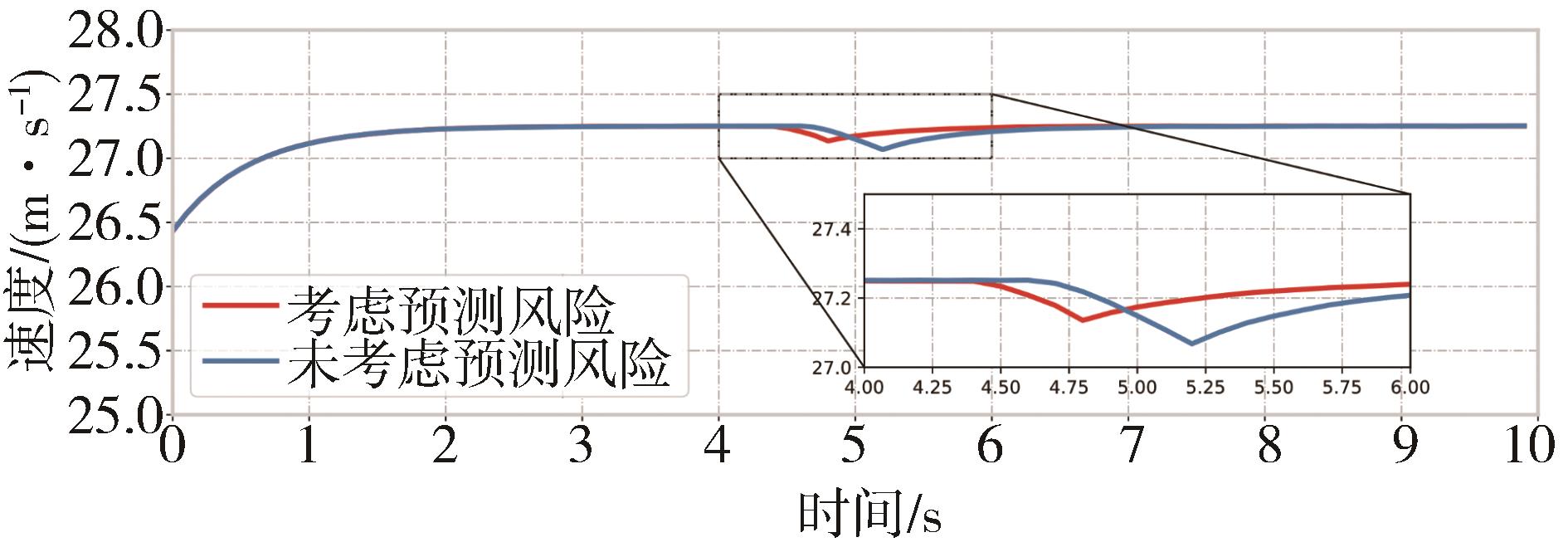

图14
两种方法在接近汇入口时的详细规划过程"

图15
超速车辆的预测风险量化值"
图16
RI值对比结果"
图17
纵向速度对比结果"
| 1 | YANG K, HUANG Y, QIN Y, et al. Potential and challenges to improve vehicle energy efficiency via V2X: literature review[J]. International Journal of Vehicle Performance, 2021, 7(3-4): 244-265. |
| 2 | TANG X, YANG K, WANG H, et al. Driving environment uncertainty-aware motion planning for autonomous vehicles[J]. Chinese Journal of Mechanical Engineering, 2022, 35(1): 120. |
| 3 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highd dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018: 2118-2125. |
| 4 | ZHAN W, SUN L, WANG D, et al. Interaction dataset: an international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[J]. arXiv preprint arXiv:, 2019. |
| 5 | TANG X, YANG K, WANG H, et al. Prediction-uncertainty-aware decision-making for autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(4): 849-862. |
| 6 | DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 2018: 1468-1476. |
| 7 | MO X, XING Y, LV C. Graph and recurrent neural network-based vehicle trajectory prediction for highway driving[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). IEEE, 2021: 1934-1939. |
| 8 | MO X, HUANG Z, XING Y, et al. Multi-agent trajectory prediction with heterogeneous edge-enhanced graph attention network[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9554-9567. |
| 9 | 杨澜, 绳贺, 赵祥模,等. 信号交叉口自动驾驶左转车辆类人化全局运动轨迹规划[J]. 中国公路学报, 2022, 35(9):14. |
| YANG L,SHENG H,ZHAO X M,et al. Humanoid motion planning strategy for left-turn maneuvers of automated vehicles at signalized intersection[J]. China Journal of Highway and Transport, 2022, 35(9):14. | |
| 10 | BRITO B, AGARWAL A, ALONSO-MORA J. Learning interaction-aware guidance for trajectory optimization in dense traffic scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18808-18821. |
| 11 | 李文礼,韩迪,任勇鹏,等.基于交互车辆轨迹预测的自动驾驶车辆轨迹规划[J].计算机应用研究,2023,40(2):519-525,538. |
| LI W L,HAN D,REN Y P, et al. Trajectory planning of autonomous vehicle based on interactive vehicle trajectory prediction[J]. Application Research of Computers, 2023,40(2):519-525,538. | |
| 12 | WANG H, LU B, LI J, et al. Risk assessment and mitigation in local path planning for autonomous vehicles with LSTM based predictive model[J]. IEEE Transactions on Automation Science and Engineering, 2021, 19(4): 2738-2749. |
| 13 | LIU K, LI N, TSENG H E, et al. Interaction-aware trajectory prediction and planning for autonomous vehicles in forced merge scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2022. |
| 14 | VELIČKOVIĆ P, CUCURULL G, CASANOVA A, et al. Graph attention networks[J]. arXiv preprint arXiv:, 2017. |
| 15 | LAKSHMINARAYANAN B, PRITZEL A, BLUNDELL C. Simple and scalable predictive uncertainty estimation using deep ensembles[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 16 | KONG J, PFEIFFER M, SCHILDBACH G, et al. Kinematic and dynamic vehicle models for autonomous driving control design[C]. 2015 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015: 1094-1099. |
| 17 | SCHWARTING W, ALONSO-MORA J, PAULI L, et al. Parallel autonomy in automated vehicles: safe motion generation with minimal intervention[C]. 2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017: 1928-1935. |
| 18 | BAE S, SAXENA D, NAKHAEI A, et al. Cooperation-aware lane change maneuver in dense traffic based on model predictive control with recurrent neural network[C]. 2020 American Control Conference (ACC). IEEE, 2020: 1209-1216. |
| 19 | ZANELLI A, DOMAHIDI A, JEREZ J, et al. FORCES NLP: an efficient implementation of interior-point methods for multistage nonlinear nonconvex programs[J]. International Journal of Control, 2020, 93(1): 13-29. |
| 20 | SHALEV-SHWARTZ S, SHAMMAH S, SHASHUA A. On a formal model of safe and scalable self-driving cars[J]. arXiv preprint arXiv:, 2017. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [4] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [5] | 刘卫国,项志宇,刘锐,李国栋,王子旭. 基于深度学习的端到端车辆运动规划方法研究[J]. 汽车工程, 2023, 45(8): 1343-1352. |
| [6] | 冉巍,陈慧,杨佳鑫,西村要介,国朝鵬,尹又雨. 基于效用理论的运动规划奖励函数设计方法[J]. 汽车工程, 2023, 45(8): 1373-1382. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [9] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
|