汽车工程 ›› 2024, Vol. 46 ›› Issue (2): 230-240.doi: 10.19562/j.chinasae.qcgc.2024.02.005
赵晓聪1,房世玉1,李子睿2,孙剑1( )
)
收稿日期:2023-06-24
修回日期:2023-07-13
出版日期:2024-02-25
发布日期:2024-02-23
通讯作者:
孙剑
E-mail:sunjian@tongji.edu.cn
基金资助:
Xiaocong Zhao1,Shiyu Fang1,Zirui Li2,Jian Sun1()
Received:2023-06-24
Revised:2023-07-13
Online:2024-02-25
Published:2024-02-23
Contact:
Jian Sun
E-mail:sunjian@tongji.edu.cn
摘要:
共享道路空间中的人类驾驶交互行为具有兼顾伴行车损益的社会性特征。由于对驾驶交互社会性的理解缺失,自动驾驶车辆往往难以估计自身行为对伴行车辆的潜在影响,因而陷入“被迫保守”的决策困境。本文在博弈论框架中引入驾驶人兼顾伴行车损益的行为特征,构建社会性驾驶交互行为模型,刻画了驾驶交互中个体间的动作依赖关系。结合该模型,提出主车预期行为对其交互对象所造成潜在影响的通用定量表达——交互效用项。通过在规划目标中引入交互效用项,可定向调整运动规划算法的交互主动性。高速路出匝道实验结果表明,在对安全性无显著影响的前提下,通过提升交互主动性,基于优化和基于采样的运动规划算法在给定距离内出匝道任务成功率可分别提升3.9%与5.2%。
赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240.
Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction[J]. Automotive Engineering, 2024, 46(2): 230-240.
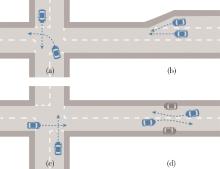
图1
典型驾驶冲突场景(a)无保护左转;(b)合流;(c)无信号交叉口直行冲突;(d)对向冲突"
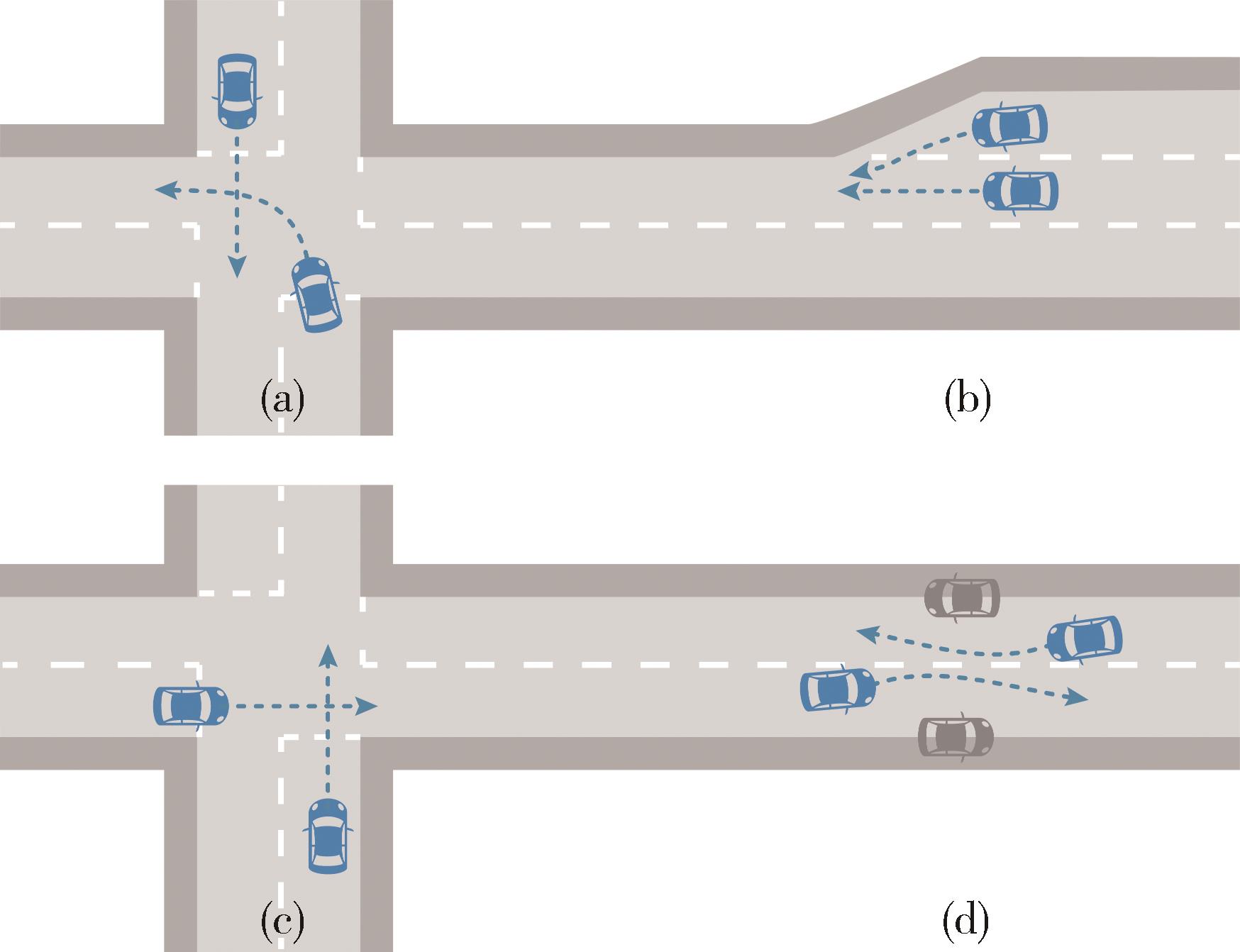

图2
交互效用项示意"
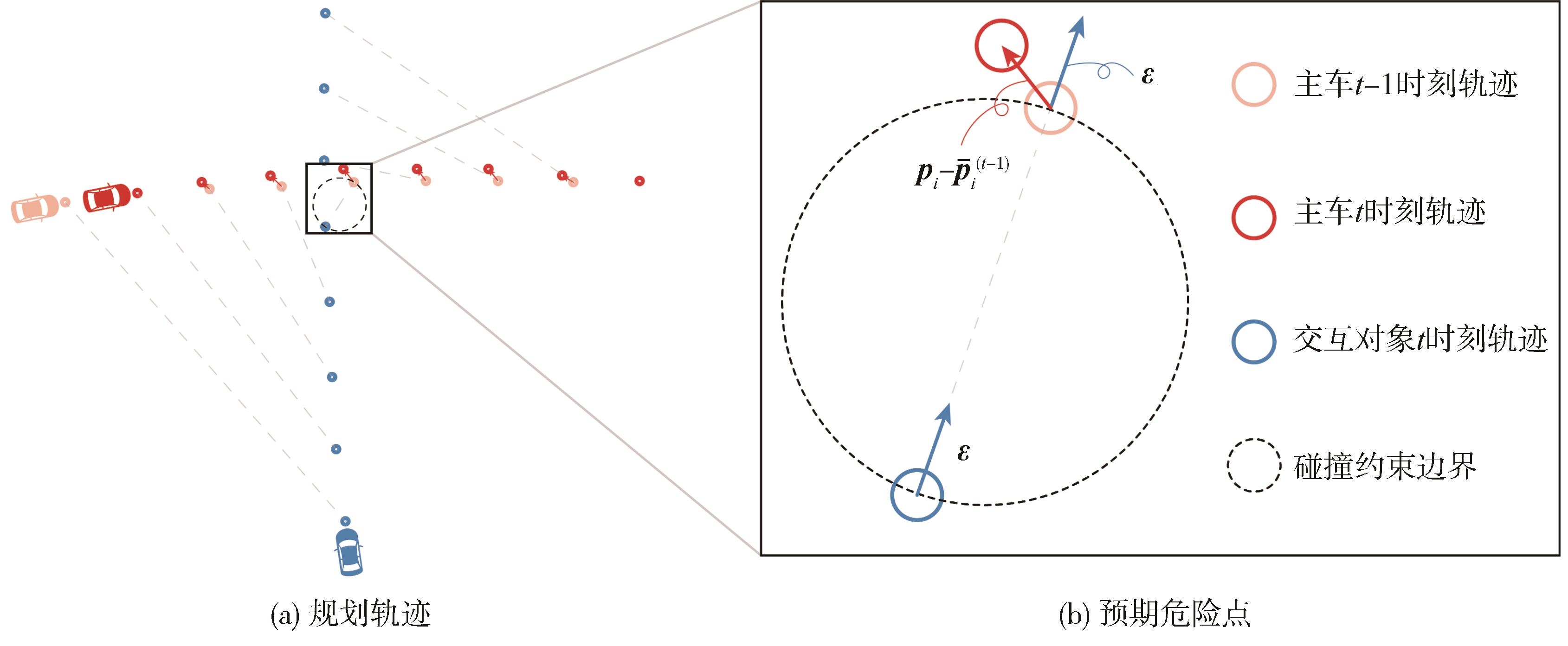

图3
高速路出匝道场景"
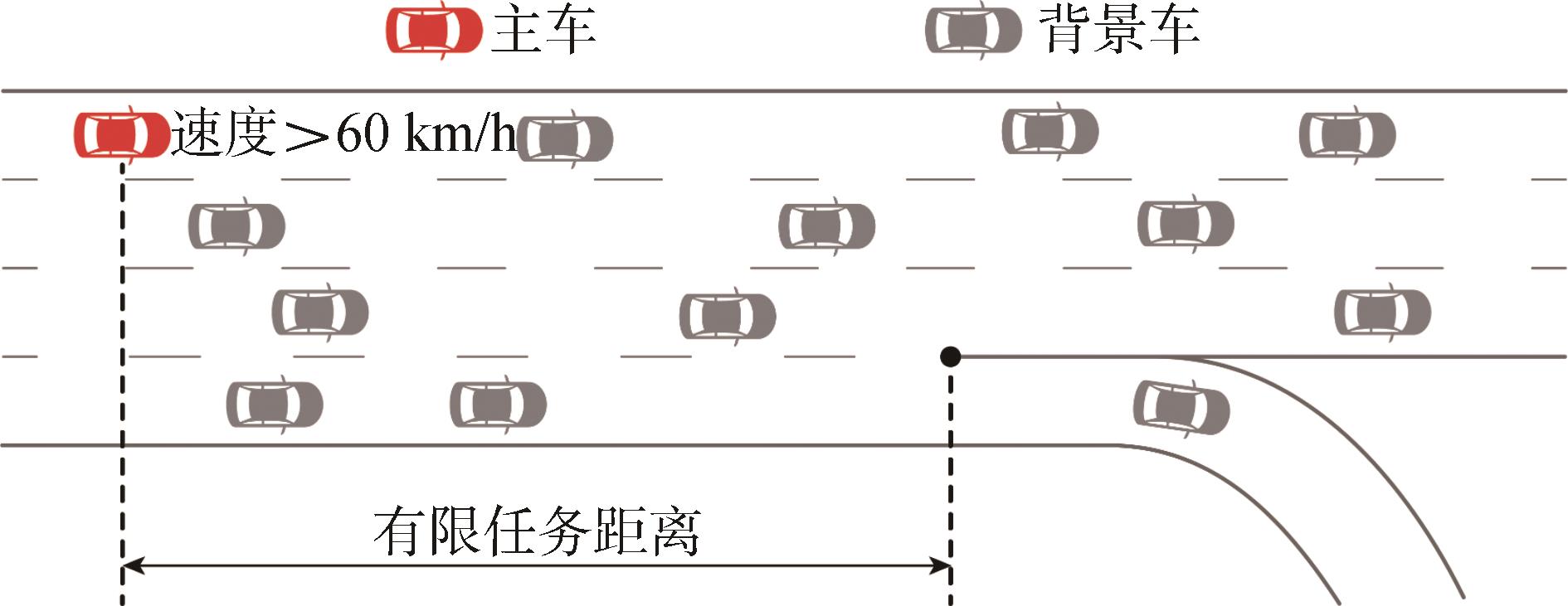
表1
IDM模型参数"
| 参数 | 均值 | 范围 | 单位 |
|---|---|---|---|
| 期望速度 | |||
| 最大加速度 | |||
| 舒适加速度 | |||
| 最小停车间距 | |||
| 期望车头时距 | |||
| 常参数 |

图4
背景车的随机横向响应特性(a)保守背景车;(b)激进背景车"
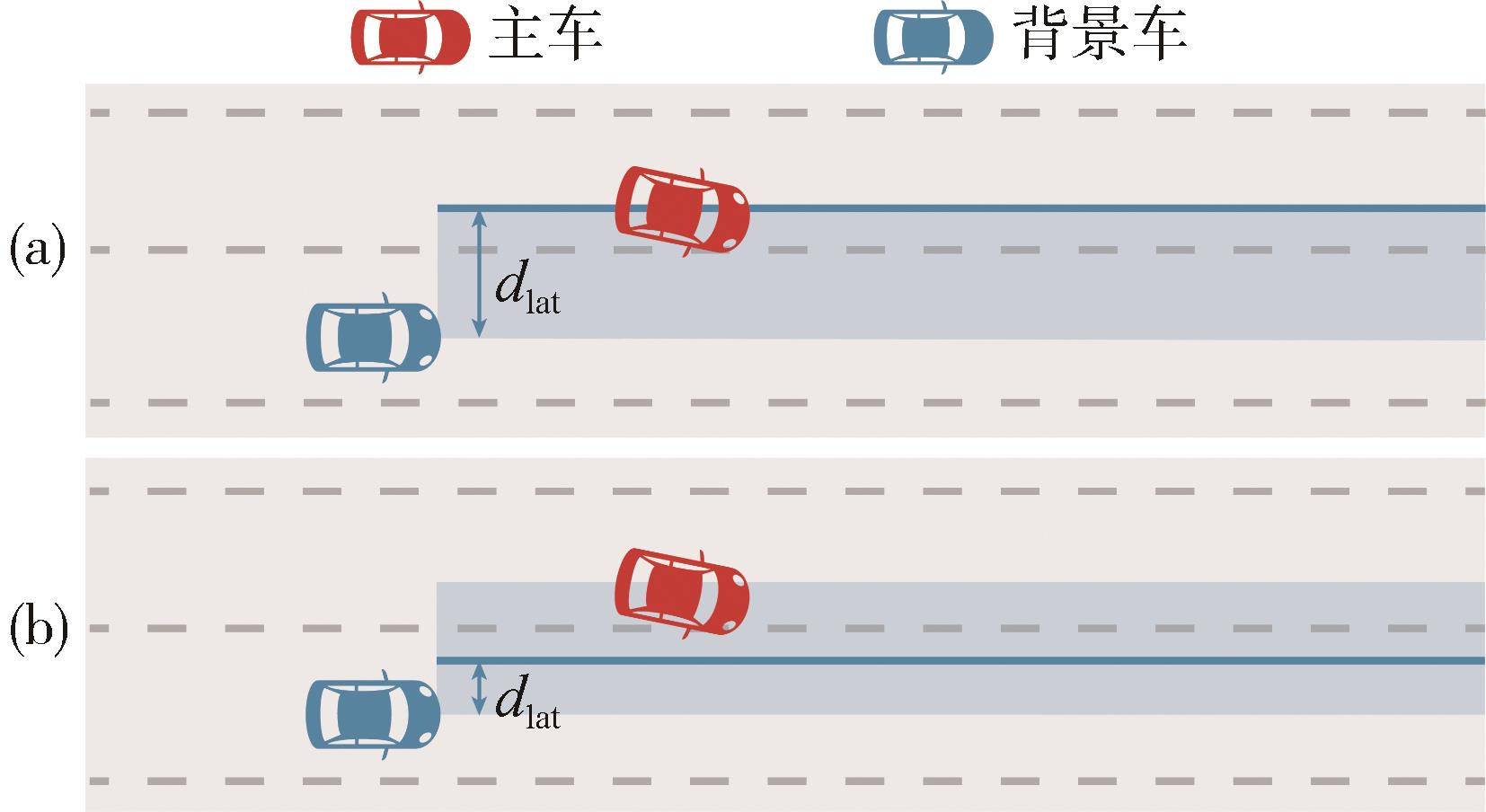
表2
纳什博弈规划算法"
算法1:最优迭代响应法求解纳什均衡 | |
|---|---|
输入: 主车上一时刻最优轨迹解 主车的当前位置 目标车道前、后车的当前位置 | |
输出:规划轨迹 | |
1 | 初始化: 迭代序号 主车轨迹解 目标车道后车轨迹解 |
2 | while |
3 | set |
4 | 迭代主车轨迹解 |
5 | 迭代目标车道后车轨迹解 |
6 | 保存迭代最优轨迹解 |
7 | end while |
8 | if |
9 | 保留上一时刻最优规划轨迹解 |
10 | end if |
11 | 输出规划轨迹解 |
表3
Frenet最优规划算法"
算法2:Frenet最优规划 | |
|---|---|
输入: 目标车道前后车当前位置 主车当前位置 参考路径特征参数备选集 | |
输出:规划轨迹 | |
1 | 初始化效用列表 |
2 | for |
3 | 生成特征参数为 |
4 | 基于参考路径构建Frenet坐标系 |
5 | 将初始状态投影至Frenet坐标系 ( |
6 | 计算目标前瞻点位置 |
7 | 生成横向和纵向的五次多项式位移函数并插值获得备选轨迹 |
8 | if |
9 | 计算横、纵向收益 |
10 | 计算整体轨迹效用 |
11 | 记录备选轨迹效用 |
12 | 将备选轨迹投影至笛卡尔坐标系 |
13 | 记录备选轨迹 |
14 | end if |
15 | end for |
16 | 遍历 |
17 | 输出最大效用轨迹 |

图5
匝道汇出任务成功率累积曲线"
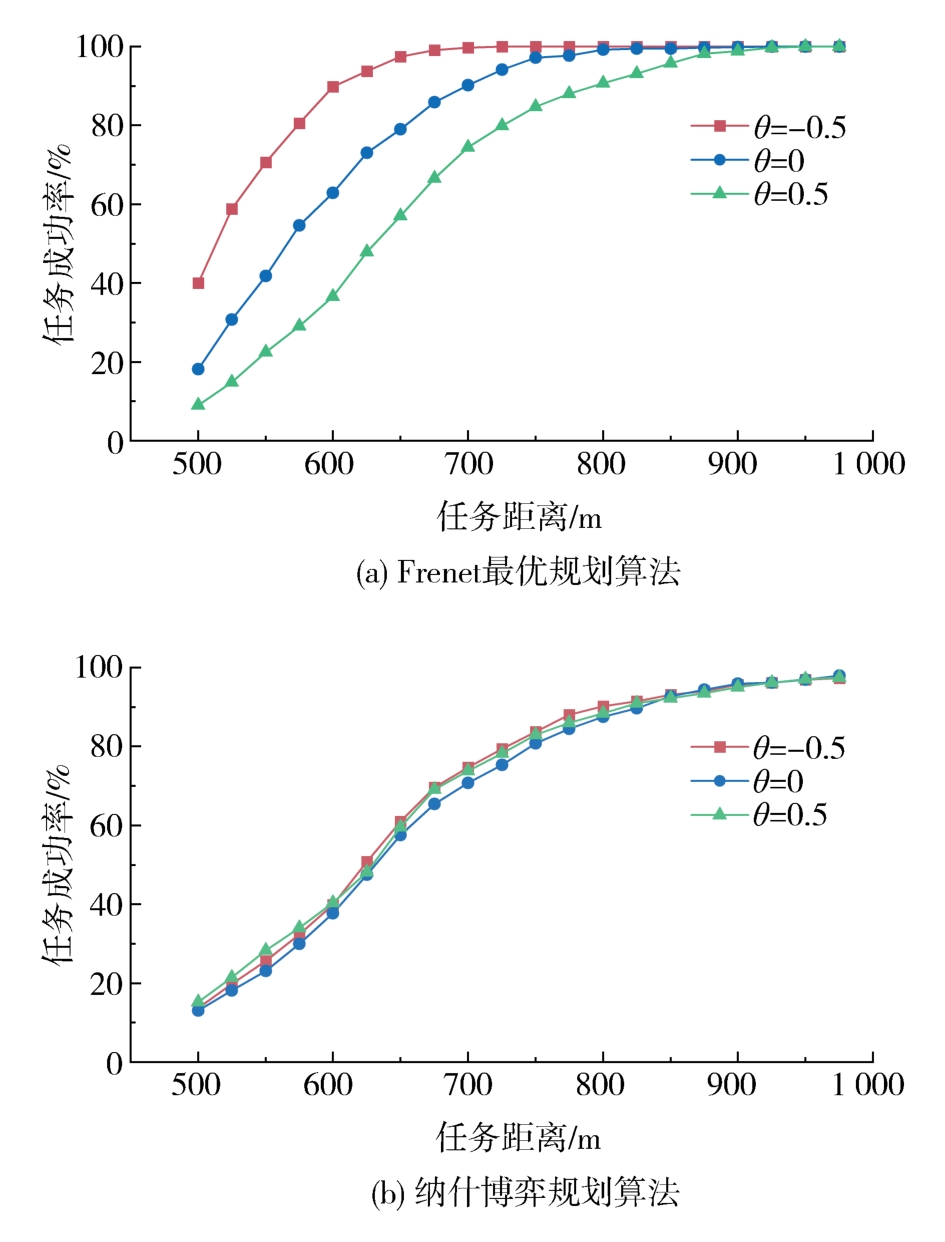
图6
换道后与前后车的碰撞时间"
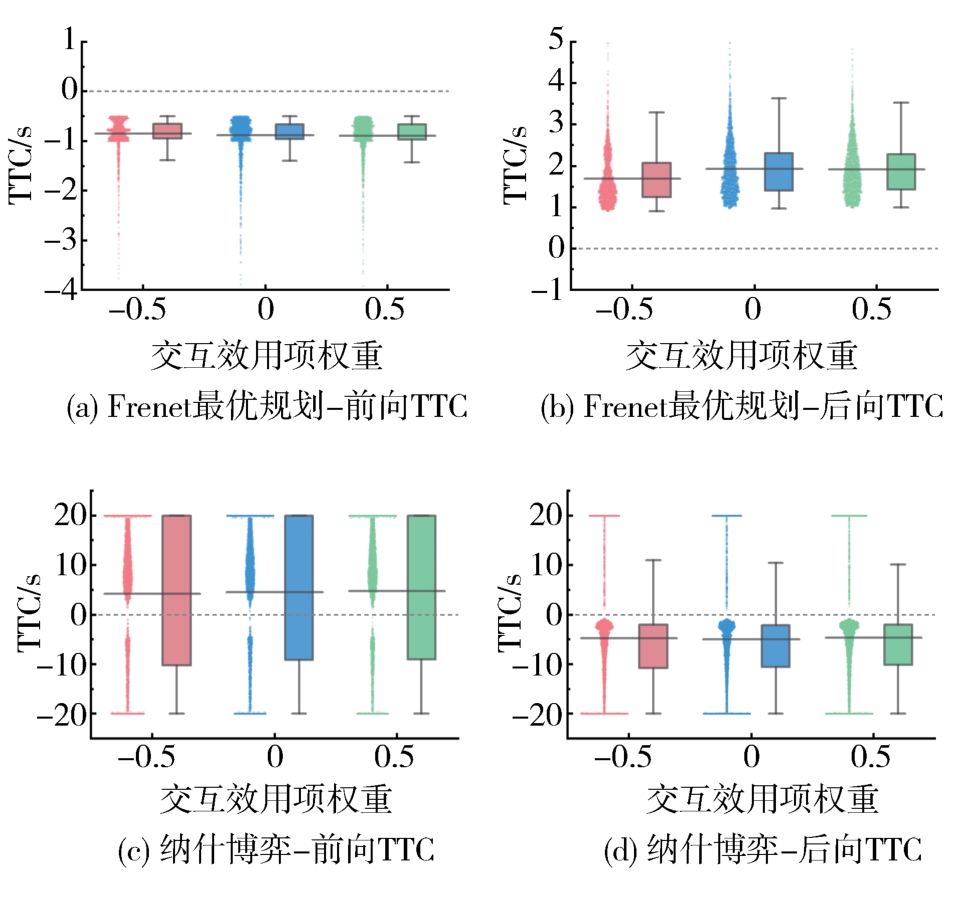
表4
匝道汇出任务安全性指标"
| 规划算法 | 换道后TTC/s | ||
|---|---|---|---|
前向TTC 均值 | 后向TTC 均值 | ||
纳什博弈 规划 | 基线 | 4.54 | -4.99 |
| 合作型( | 4.72 | -4.62 | |
| 竞争型( | 4.26 | -4.80 | |
Frenet 最优规划 | 基线 | -0.75 | 1.93 |
| 合作型( | -0.80 | 1.91 | |
| 竞争型( | -0.58* | 1.69* | |

图7
不同交互效用项权重下的TTC均值注:*根据双尾T检验,相较于基线规划算法(θ=0)的差异在α=0.01的置信度水平下具有显著性。"
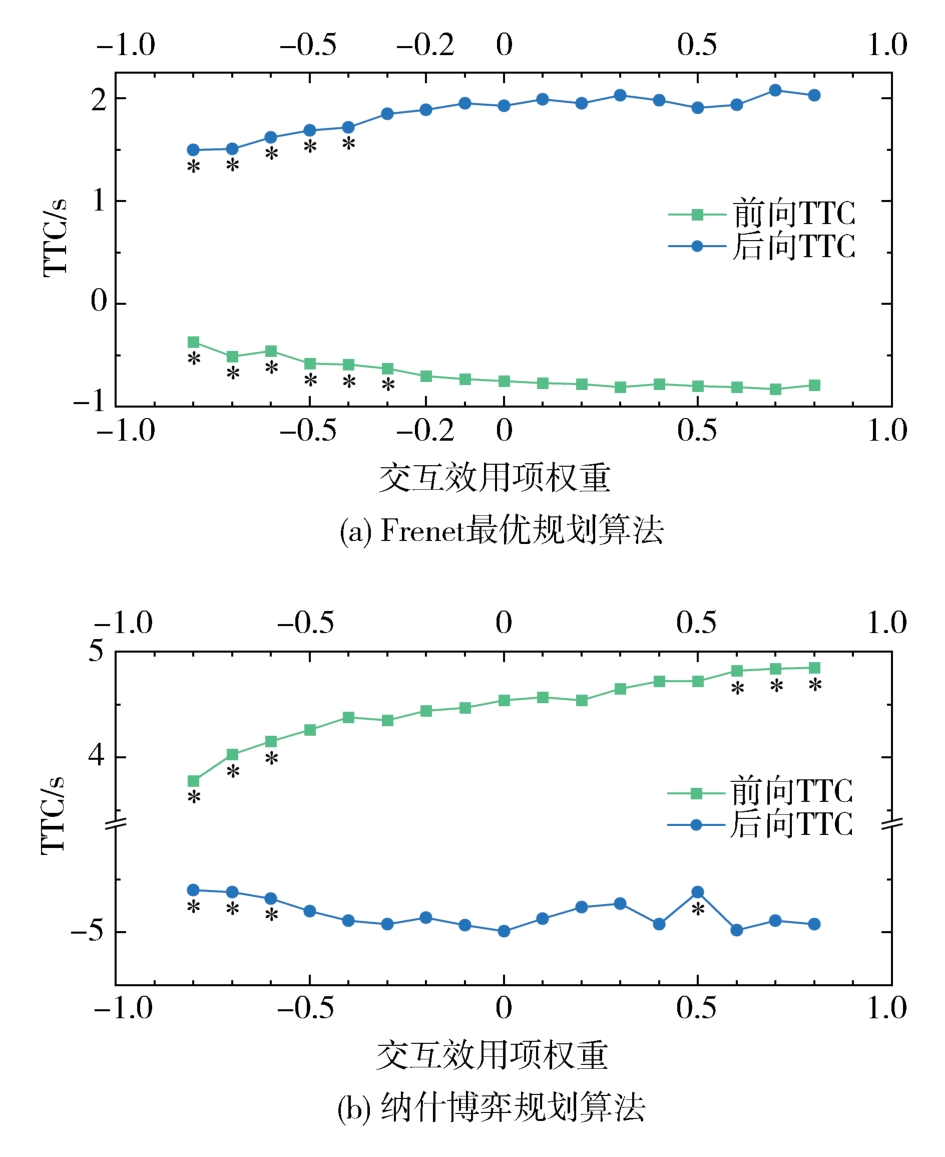

图8
换道规划轨迹"
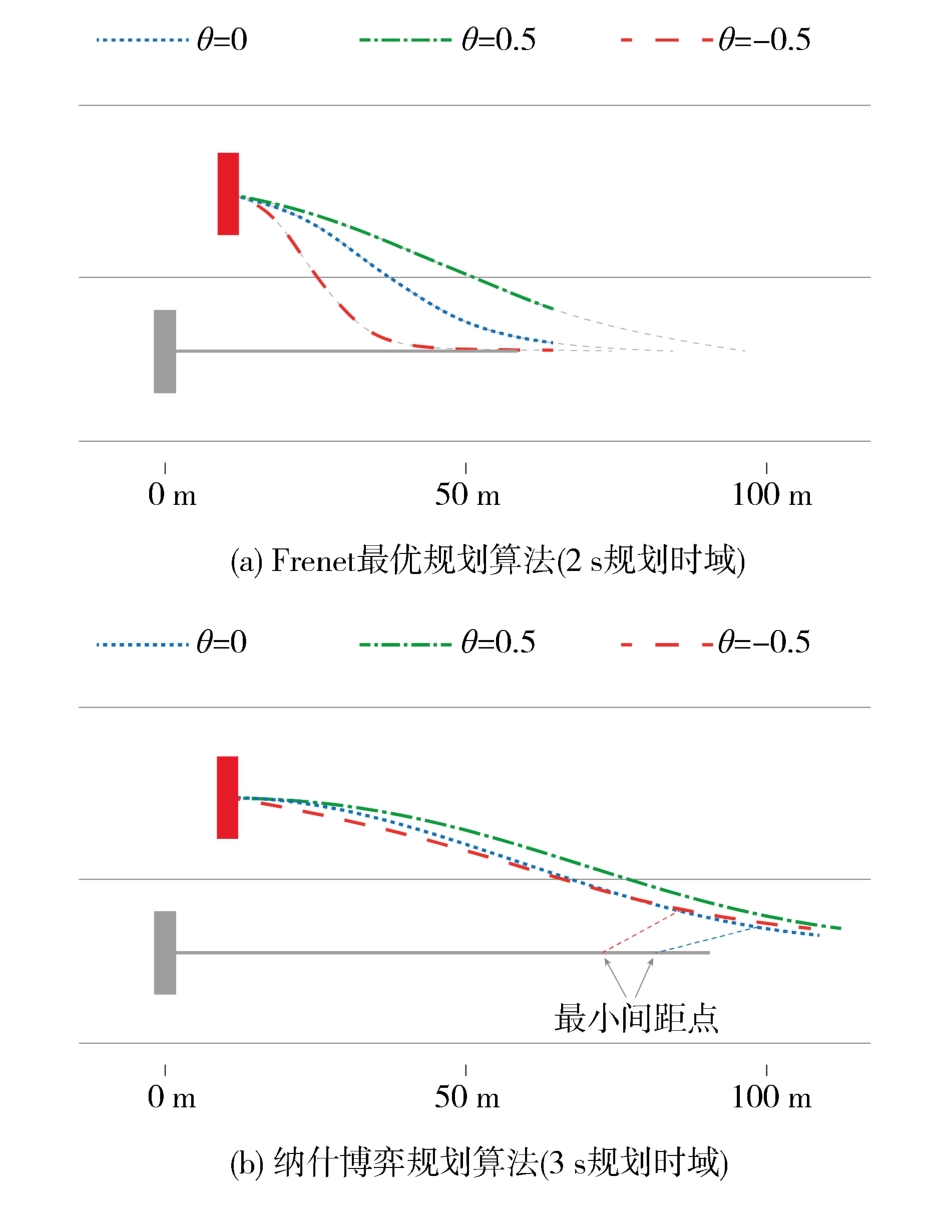

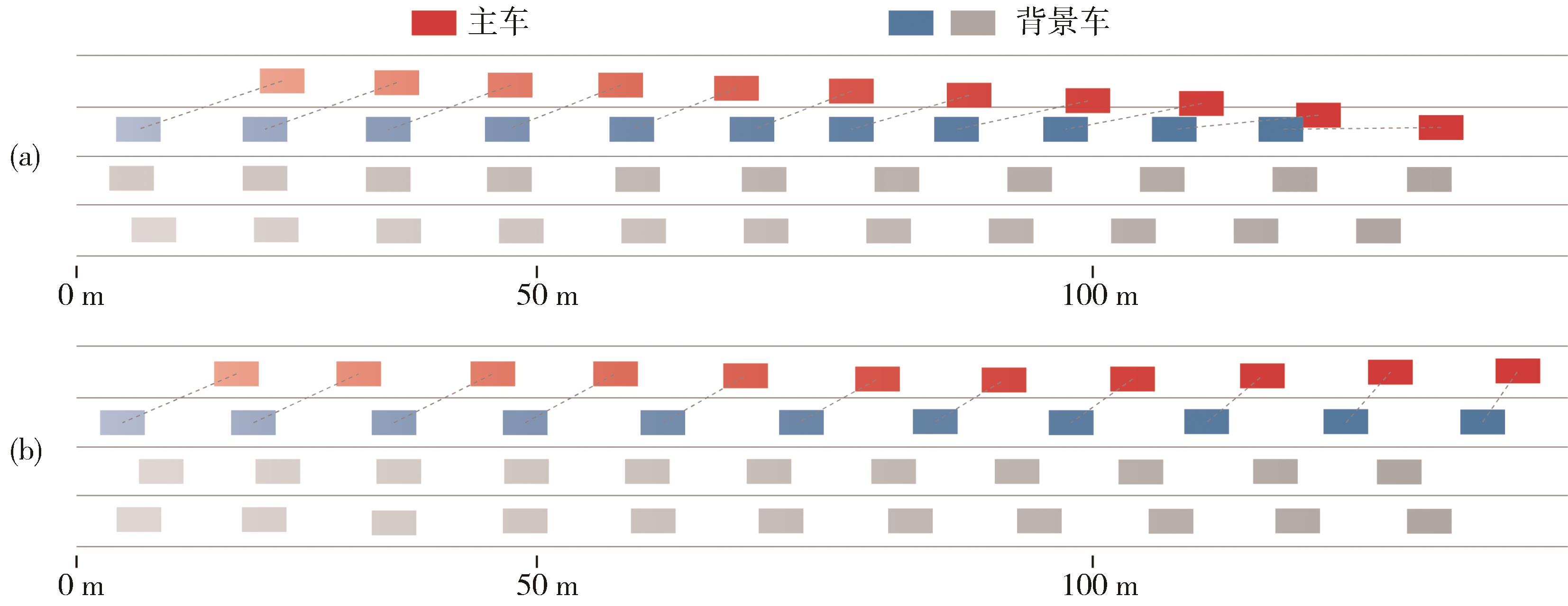
图9
高速路换道场景试探行为:(a)面对保守型背景车的协作响应案例;(b)面对激进型背景车的无响应退回案例"
| 1 | SCHIEBEN A, WILBRINK M, KETTWICH C, et al. Designing the interaction of automated vehicles with other traffic participants: design considerations based on human needs and expectations[J]. Cognition, Technology & Work, 2019, 21(1): 69-85. |
| 2 | 彭理群, 王依婷, 马育林, 等. 面向混合自动驾驶车流的协同自适应巡航控制[J]. 汽车工程, 2022, 44(8): 1153–1161. |
| PENG L Q, WANG Y T, MA Y L, et al. Cooperated adaptive cruise control for mixed autonomous traffic flow[J]. Automotive Engineering, 2022, 44(8): 1153-1161. | |
| 3 | WANG H, WANG W, YUAN S, et al. On social interactions of merging behaviors at highway on-ramps in congested traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 11237-11248. |
| 4 | ZHAN W, LIU C, CHAN C, et al. A non-conservatively defensive strategy for urban autonomous driving[C]. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2016: 459-464. |
| 5 | NOH S. Decision-making framework for autonomous driving at road intersections: safeguarding against collision, overly conservative behavior, and violation vehicles[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3275-3286. |
| 6 | POKORNY P, HØYE A. Descriptive analysis of reports on autonomous vehicle collisions in California: January 2021-June 2022[J]. Traffic Safety Research, 2022, 2: 000011-000011. |
| 7 | PETROVIĆ Đ, MIJAILOVIĆ R, PEŠIĆ D. Traffic accidents with autonomous vehicles: type of collisions, manoeuvres and errors of conventional vehicles’ drivers[J]. Transportation Research Procedia, 2020, 45: 161-168. |
| 8 | 胡益凯, 庄瀚洋, 王春香, 等. 基于主从博弈的智能车汇流场景决策方法[J]. 上海交通大学学报, 2021, 55(8): 1027-1034. |
| HU Y K, ZHUANG H Y, WANG C X, et al. Stackelberg-game-based intelligent vehicle decision method for merging scenarios[J], Journal of Shanghai Jiao Tong University, 2021, 55(8): 1027-1034. | |
| 9 | YU H, TSENG H E, LANGARI R. A human-like game theory-based controller for automatic lane changing[J]. Transportation Research Part C: Emerging Technologies, 2018, 88: 140-158. |
| 10 | REN Y, ELLIOTT S, WANG Y, et al. How shall I drive? interaction modeling and motion planning towards empathetic and socially-graceful driving[C]. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 4325-4331. |
| 11 | LINIGER A, LYGEROS J. A noncooperative game approach to autonomous racing[J]. IEEE Transactions on Control Systems Technology, 2020, 28(3): 884-897. |
| 12 | ZHOU D, MA Z, ZHANG X, et al. Autonomous vehicles’ intended cooperative motion planning for unprotected turning at intersections[J]. IET Intelligent Transport Systems, 2022, 16(8): 1058-1073. |
| 13 | ZHOU D, MA Z, ZHAO X, et al. Reasoning graph: a situation-aware framework for cooperating unprotected turns under mixed connected and autonomous traffic environments[J]. Transportation Research Part C: Emerging Technologies, 2022, 143: 103815. |
| 14 | SADIGH D, LANDOLFI N, SASTRY S S, et al. Planning for cars that coordinate with people: leveraging effects on human actions for planning and active information gathering over human internal state[J]. Autonomous Robots, 2018, 42(7): 1405-1426. |
| 15 | LIU X, PETERS L, ALONSO-MORA J. Learning to play trajectory games against opponents with unknown objectives[J]. arXiv Preprint arXiv: , 2023. |
| 16 | SPICA R, CRISTOFALO E, WANG Z, et al. A real-time game theoretic planner for autonomous two-player drone racing[J]. IEEE Transactions on Robotics, 2020, 36(5): 1389-1403. |
| 17 | 兰凤崇, 刘迎节, 陈吉清, 等. 基于动态博弈算法的切入场景下自动驾驶车辆运动规划研究[J]. 汽车工程, 2023, 45(1): 9-19. |
| LAN F C, LIU Y J, CHEN J Q, et al. Study on motion planning of autonomous vehicles in cut-in scenes based on dynamic game algorithm[J]. Automotive Engineering, 2023, 45(1): 9-19. | |
| 18 | FIACCO A V. Introduction to sensitivity and stability analysis in nonlinear programming[M]. New York: Academic Press, 1983. |
| 19 | CAO Z, YANG D, XU S, et al. Highway exiting planner for automated vehicles using reinforcement learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 990-1000. |
| 20 | ISELE D. Interactive decision making for autonomous vehicles in dense traffic[C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). IEEE, 2019: 3981-3986. |
| 21 | ZHAO X, TIAN Y, SUN J. Yield or rush? social-preference-aware driving interaction modeling using game-theoretic framework[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). IEEE, 2021: 453-459. |
| 22 | SCHWARTING W, PIERSON A, ALONSO-MORA J, et al. Social behavior for autonomous vehicles[J]. Proceedings of the National Academy of Sciences, 2019: 201820676. |
| 23 | 张晓彤, 王嘉诚, 何景涛, 等. 面向不确定性环境的自动驾驶运动规划:机遇与挑战[J]. 模式识别与人工智能, 2023, 36(1): 1-21. |
| ZHANG X T, WANG J C, HE J T, et al. Motion planning under uncertainty for autonomous driving: opportunities and challenges[J]. Pattern Recognition and Artificial Intelligence, 2023, 36(1): 1-21. | |
| 24 | 叶颖俊, 倪颖, 孙剑. 高密度瓶颈交通流主动-回应汇入行为定义与建模[J]. 中国公路学报, 2022, 35(8): 278-290. |
| YE Y J, NI Y, SUN J. Defining and modeling active-responsive merging behavior at high-density expressway on-ramp bottlenecks[J]. China Journal of Highway and Transport, 2022, 35(8): 278-290. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [3] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [4] | 刘卫国,项志宇,刘锐,李国栋,王子旭. 基于深度学习的端到端车辆运动规划方法研究[J]. 汽车工程, 2023, 45(8): 1343-1352. |
| [5] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [6] | 冉巍,陈慧,杨佳鑫,西村要介,国朝鵬,尹又雨. 基于效用理论的运动规划奖励函数设计方法[J]. 汽车工程, 2023, 45(8): 1373-1382. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [9] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
|