汽车工程 ›› 2023, Vol. 45 ›› Issue (8): 1343-1352.doi: 10.19562/j.chinasae.qcgc.2023.08.005
所属专题: 智能网联汽车技术专题-规划&决策2023年
刘卫国1,2,项志宇1( ),刘锐2,李国栋3,王子旭2
),刘锐2,李国栋3,王子旭2
Weiguo Liu1,2,Zhiyu Xiang1(),Rui Liu2,Guodong Li3,Zixu Wang2
摘要:
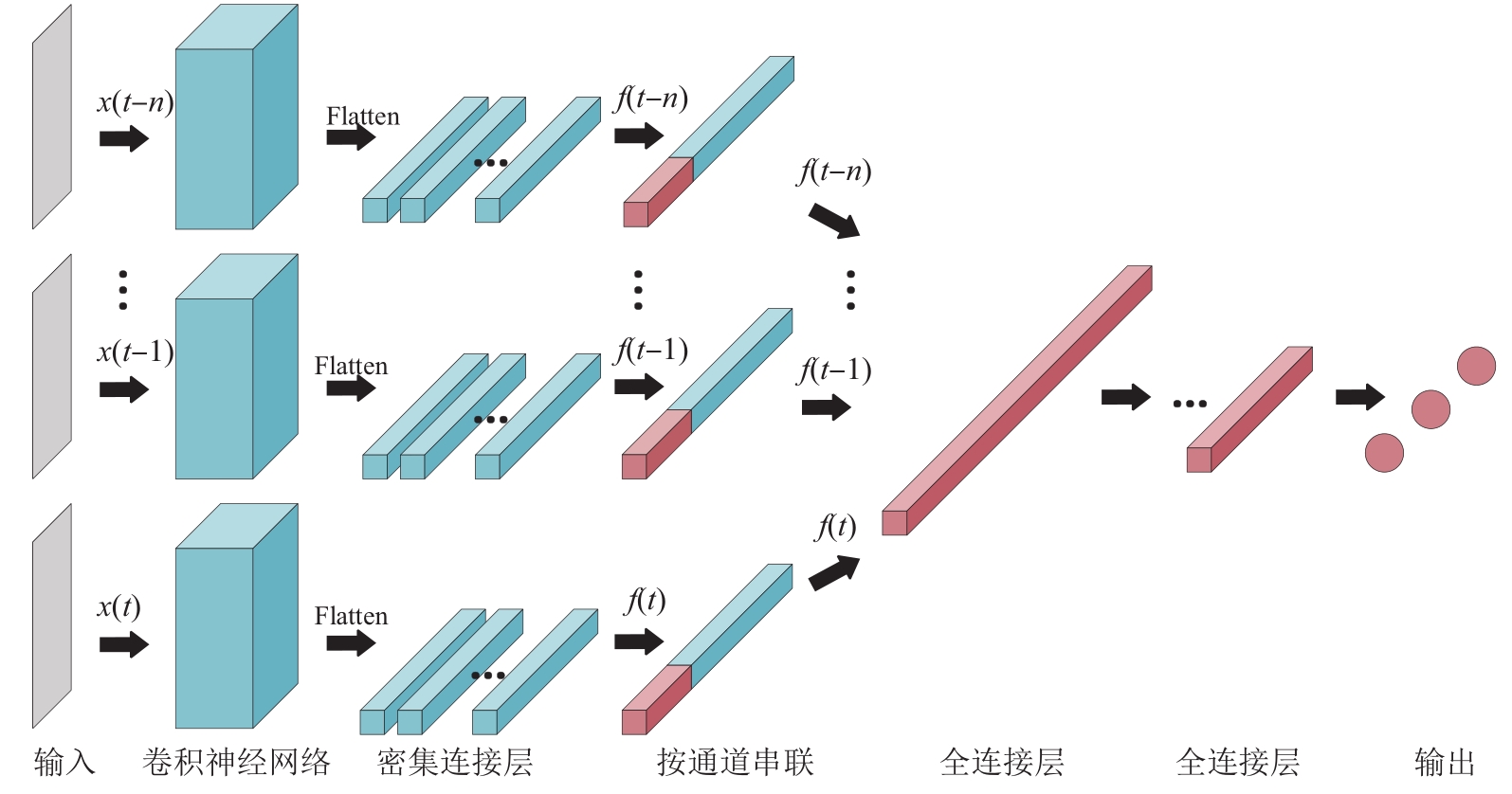
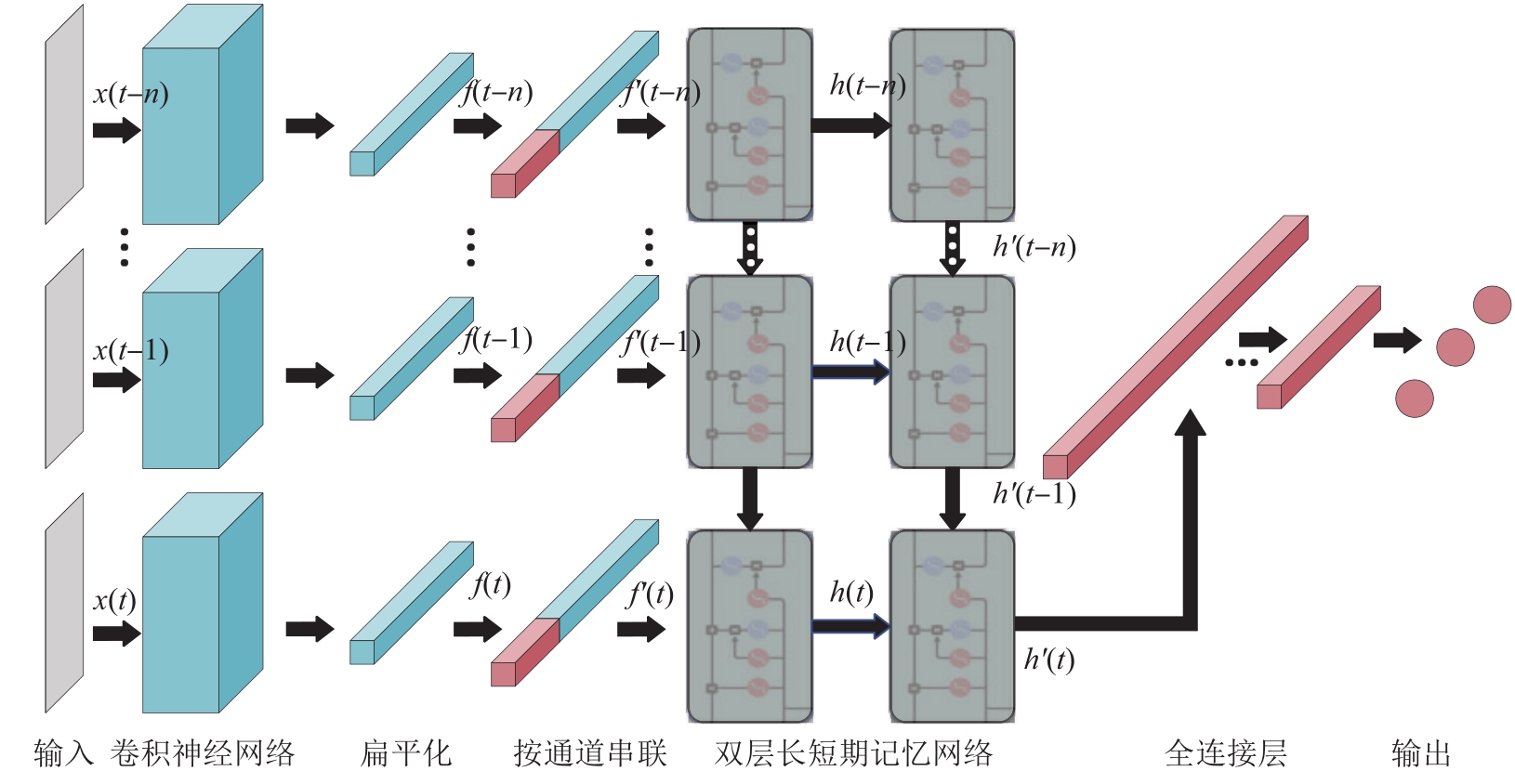
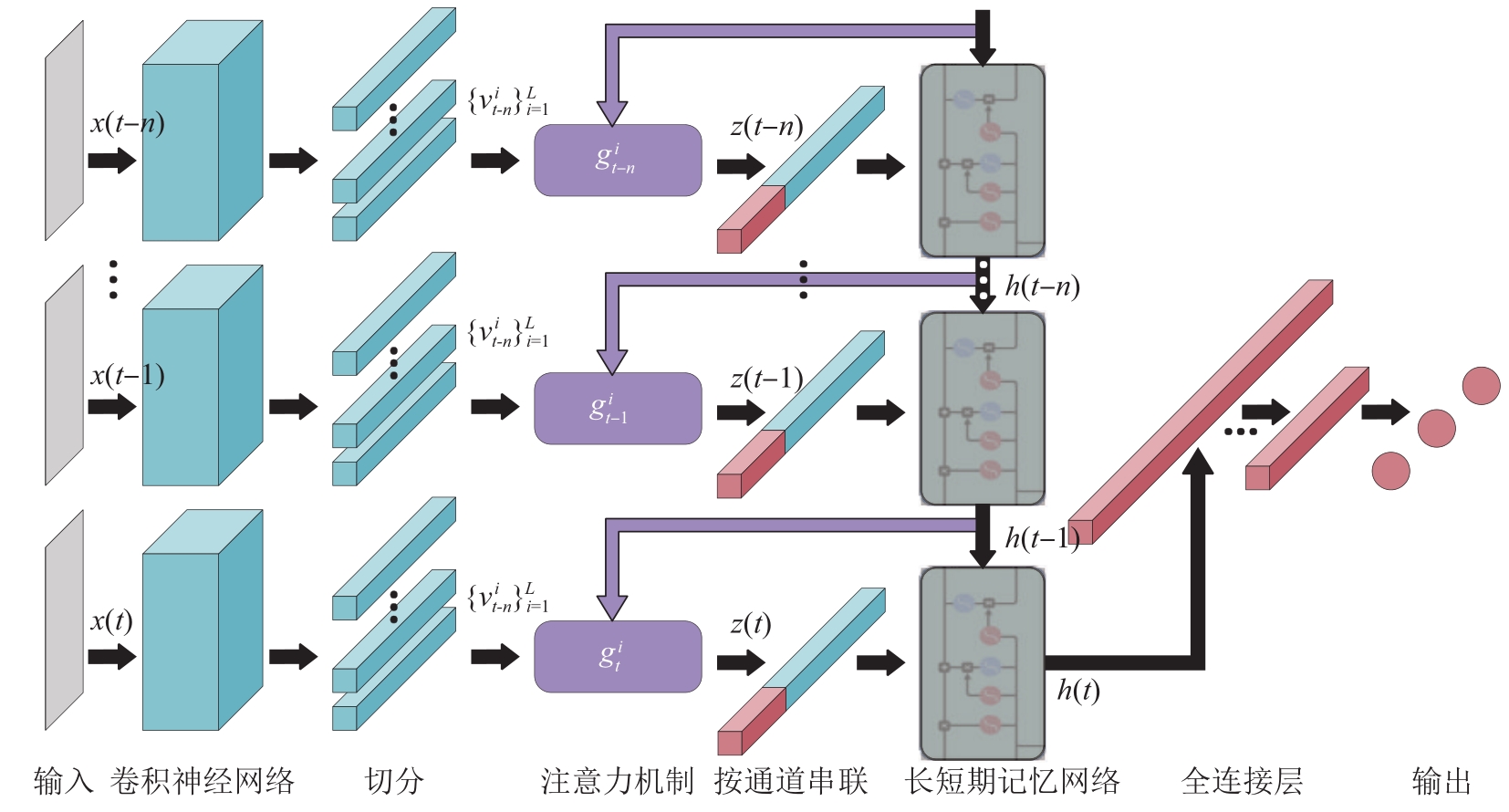
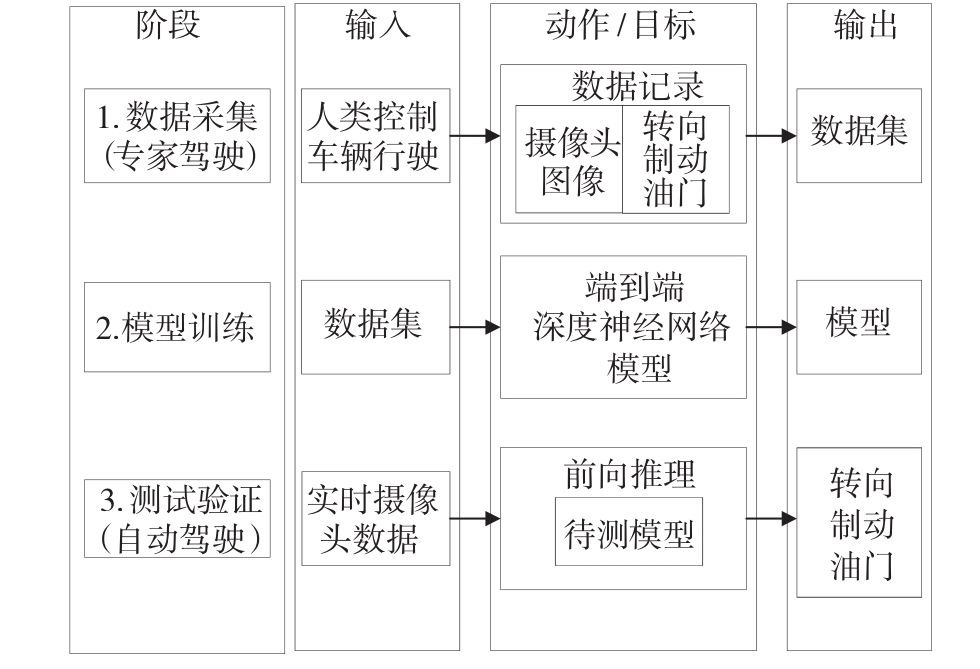
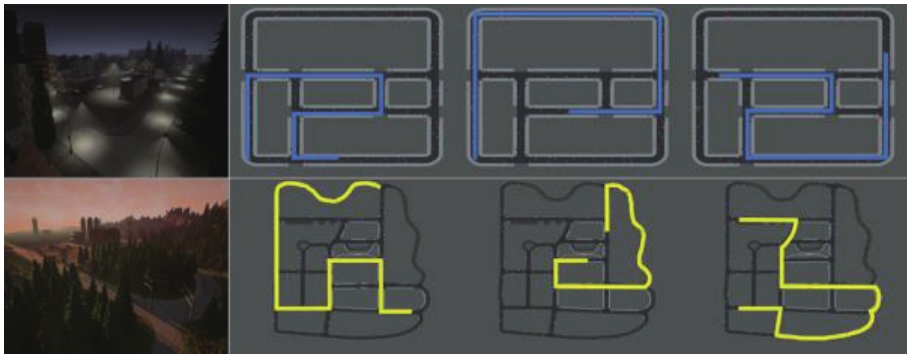
在现有端到端的深度学习自动驾驶框架中,普遍存在规划控制预测精度低的问题,这往往是由于输入数据源单一、无法兼顾时间和空间信息而导致的。为更好地体现虚拟仿真测试中自车与环境、交通参与者的历史交互过程对当前时刻决策的影响,本文设计了一种用于自动驾驶仿真环境下车辆运动规划任务的多级时空注意力长短期记忆网络。该算法提取和表征自动驾驶环境的深层抽象信息,并在仿真平台中实现端到端的车辆运动控制。首先,将前视摄像头模型获取的RGB仿真数据的历史连续视频帧序列作为输入,使用卷积模块提取单一时刻图像的空间特征;其次,使用LSTM模块融合图像历史时刻的空间信息,从而获得时间上下文特征。同时,为提高对时空关键信息的提取能力并加速网络收敛,本文在多级时空特征的融合部分采用了时空注意力机制。本研究在Carla仿真平台上进行了测试验证,实验结果表明本文所提出的方法相比单一时空算法更能精确地模仿人类驾驶决策行为。