汽车工程 ›› 2024, Vol. 46 ›› Issue (2): 241-252.doi: 10.19562/j.chinasae.qcgc.2024.02.006
王庞伟1,刘程1,汪云峰2( ),张名芳1
),张名芳1
收稿日期:2023-06-14
出版日期:2024-02-25
发布日期:2024-02-23
通讯作者:
汪云峰
E-mail:wang.yf@rioh.cn
基金资助:
Pangwei Wang1,Cheng Liu1,Yunfeng Wang2(),Mingfang Zhang1
Received:2023-06-14
Online:2024-02-25
Published:2024-02-23
Contact:
Yunfeng Wang
E-mail:wang.yf@rioh.cn
摘要:
为提高城市路网下智能网联汽车的通行效率以及燃油效率,提出面向城市道路的多车道时空轨迹优化方法。首先,结合多车道时空位置关系定义智能网联汽车状态与约束,综合考虑通行效率与燃油经济性构建时空轨迹复合优化模型,并采用庞特里亚金极大值算法进行求解。然后,本文设定协同换道的规则,并通过Q-learning算法获取最优的换道策略。最后,通过SUMO/Python联合仿真验证了该方法可以在不同车辆饱和程度、绿信比状态及最低通行速度条件下有效提高通行效率,且燃油效率得到明显改善。
王庞伟,刘程,汪云峰,张名芳. 面向城市道路的智能网联汽车多车道轨迹优化方法[J]. 汽车工程, 2024, 46(2): 241-252.
Pangwei Wang,Cheng Liu,Yunfeng Wang,Mingfang Zhang. Multi-lane Trajectory Optimization for Intelligent Connected Vehicles in Urban Road Network[J]. Automotive Engineering, 2024, 46(2): 241-252.

图1
3×3城市路网场景构建示意图"
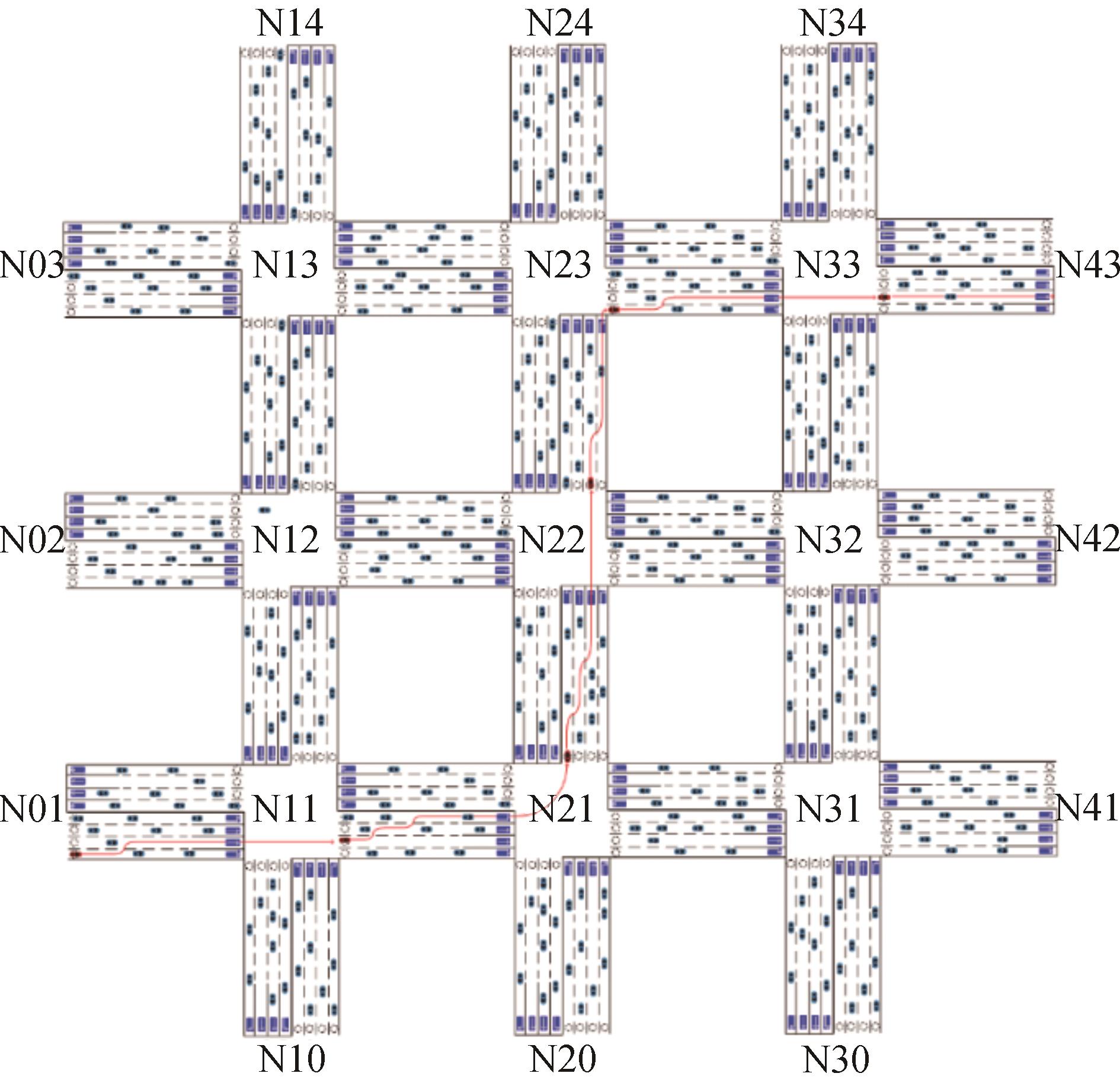
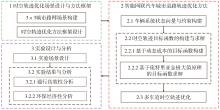
图2
面向城市道路的智能网联汽车多车道时空轨迹优化方法"


图3
编号为Cmn的车辆换道环境示意图"
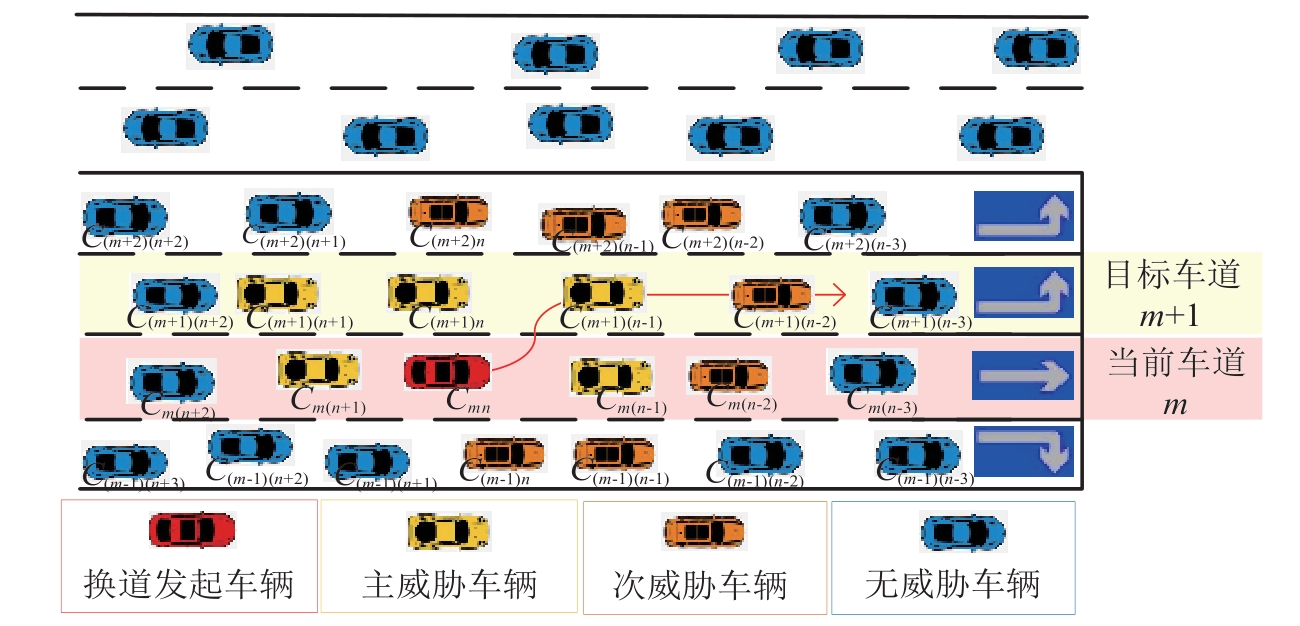
表1
Q-learning算法"
| Q-learning算法 | |
|---|---|
| 1 | 初始化 |
| 2 | while ( |
| 3 | {选择初始状态s0,参考ε-greedy策略在状态 |
| 4 | while ( |
| 5 | {(1)参考ε-greedy策略在状态 |
| 6 | (2) |
| 7 | (3) |
| 8 | 最优换道策略 |

图4
仿真实验环境搭建"

表2
实验参数设置"
| 参数 | 设定值 |
|---|---|
| 权重系数w1 | 100 |
| 权重系数w2 | 50 |
| 权重系数w3 | 10 |
| 权重系数w4 | 200 |
| 权重系数w5 | 1 |
| 权重系数w6 | 5 |
| 权重系数w7 | 50 |
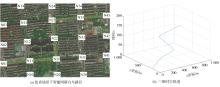
图5
智能网联汽车三维时空轨迹展示图"


图6
基于SUMO的部分仿真过程"
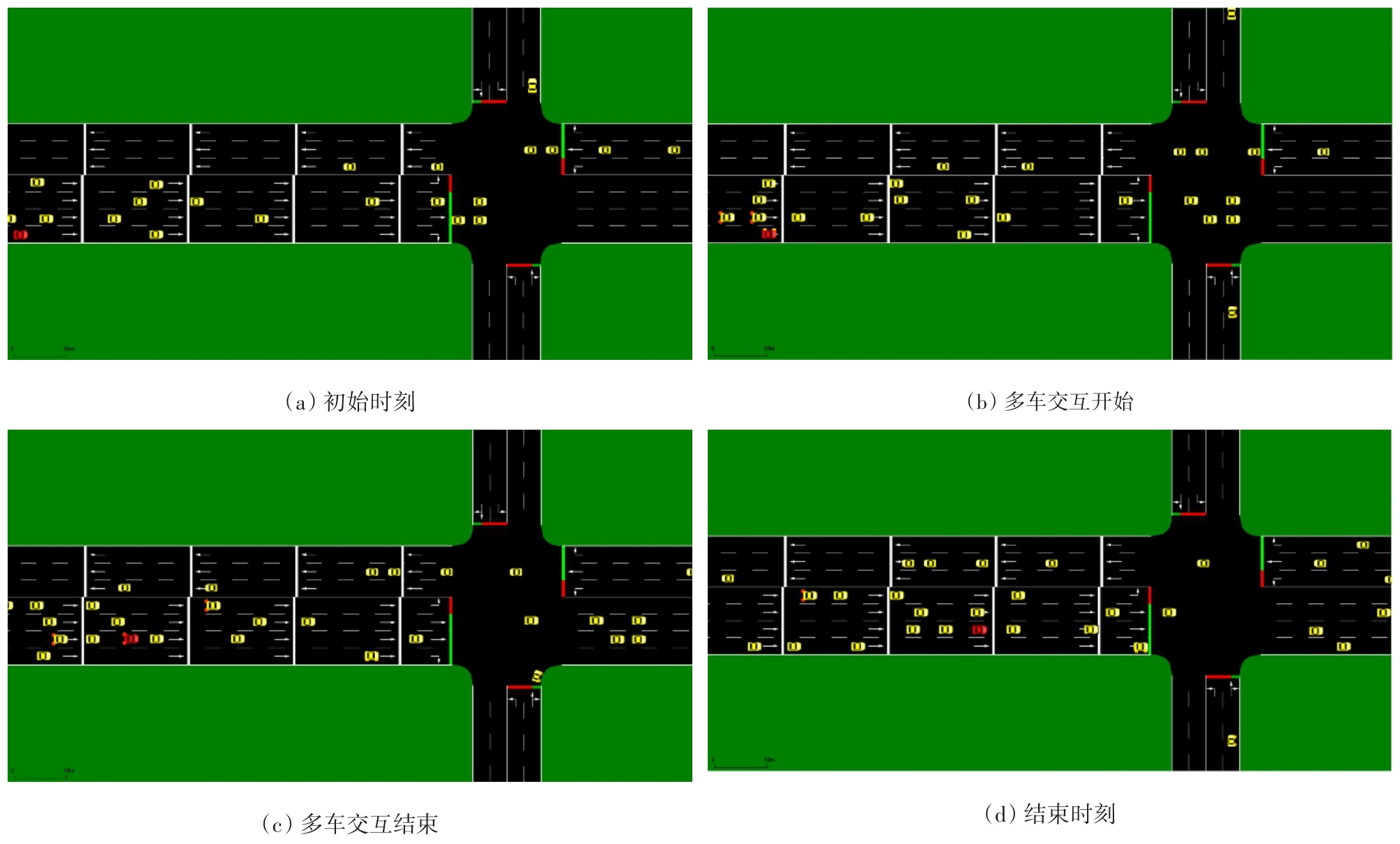

图7
时空轨迹优化方法计算时间"

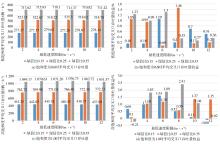
图8
不同饱和度条件下平均交叉口智能网联汽车吞吐量以及收益"

表3
各仿真控制方法下智能网联汽车平均通行时间的数学统计"
| 饱和度为0.6/0.8/1.0 | 基准仿真控制方法 | GPPA | 本文方法 |
|---|---|---|---|
| 平均值/s | 84.58/96.91/125.81 | 79.30/90.22/116.40 | 77.24/88.15/113.69 |
| 标准差 | 9.77/12.81/16.53 | 6.59/8.30/13.33 | 4.07/6.66/10.19 |
| 收益/% | 0.00/0.00/0.00 | 6.24/6.90/7.48 | 8.68/9.04/6.63 |
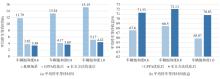
图9
智能网联汽车平均停车等待时间及收益"


图10
智能网联汽车燃油消耗收益拟合曲面图"


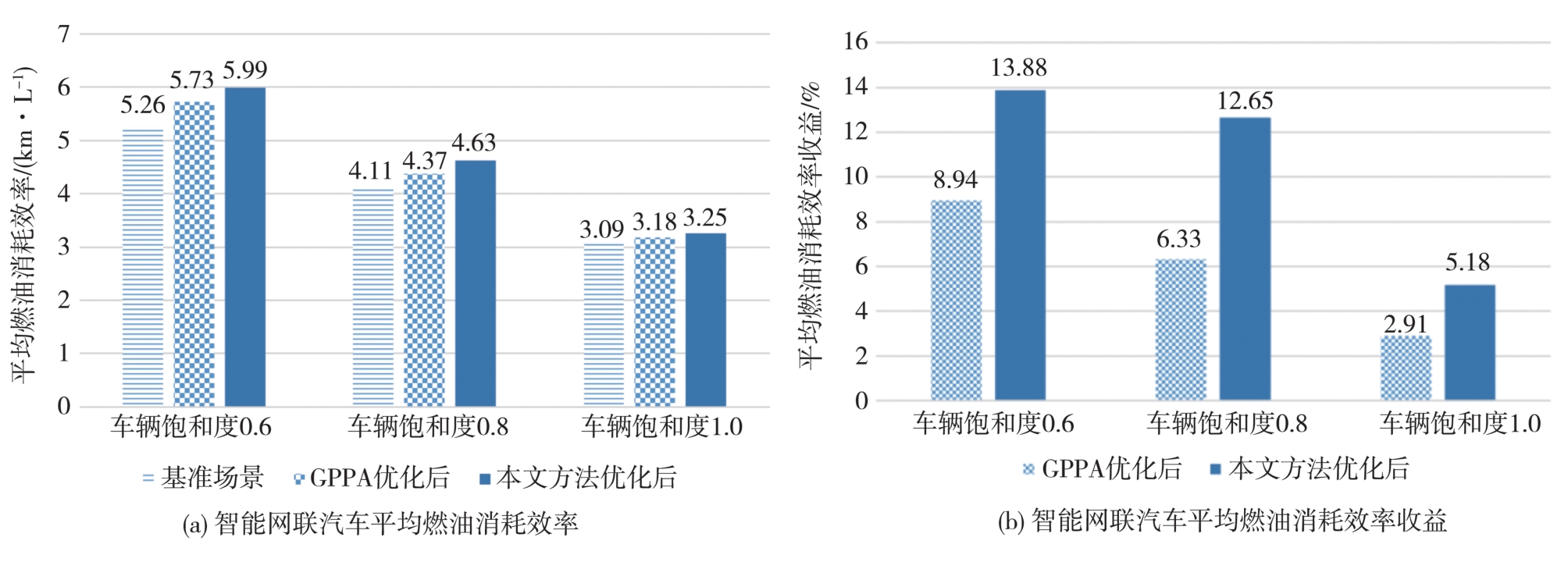
图11
智能网联汽车平均燃油消耗效率与收益"
| 1 | 朱庆功, 刘俊女, 赵笑春, 等. 北京市轻型汽油车蒸发排放总量评估[J]. 中国环境科学, 2022, 42(3): 1066-1072. |
| ZHU Q G, LIU J N, ZHAO X C, et al. Estimation of light-duty vehicles total evaporative emissions in Beijing[J]. China Environmental Science, 2022, 42(3): 1066-1072. | |
| 2 | 《中国公路学报》编辑部.中国交通隧道工程学术研究综述·2022[J]. 中国公路学报, 2022, 35(4): 1-40. |
| Editorial Board of the China Journal of Highway and Transport. Review on China’s tunnel engineering research: 2022[J]. China Journal of Highway and Transport, 2022, 35(4): 1-40. | |
| 3 | LI B, ZHANG Y M, FENG Y H, et al. Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3): 340-350. |
| 4 | NOROUZI A, KAZEMI R, ABBASSI O R. Path planning and re-planning of lane change maneuvers in dynamic traffic environments[J]. International Journal of Vehicle Autonomous Systems, 2019, 14(3): 239-264. |
| 5 | 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. |
| ZONG F, SHI P X, WANG M, et al. Connected and automated vehicle mixed-traffic car-following model considering states of multiple front and rear vehicles[J]. China Journal of Highway and transport, 2021, 34(7): 105-117. | |
| 6 | 崔洁茗, 余贵珍, 周彬, 等. 基于神经网络的车辆强制换道预测模型[J]. 北京航空航天大学学报, 2022, 48(5): 890-897. |
| CUI J M, YU G Z, ZHOU B, et al. Neural network-based prediction model for forced lane change of vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 890-897. | |
| 7 | HAO L, SUN B H, LI G, et al. The eco-driving considering coordinated control strategy for the intelligent electric vehicles[J]. IEEE Access, 2021, 9: 10686-10698. |
| 8 | YANG Z, FENG Y H, LIU H. A cooperative driving framework for urban arterials in mixed traffic conditions[J]. Transportation Research Part C: Emerging Technologies, 2021, 124. |
| 9 | 鲁工圆, 王超宇, 沈子力, 等.面向追踪间隔压缩的高速铁路列车运行时空轨迹优化[J]. 铁道学报, 2021, 43(7): 10-18. |
| LU G Y, WANG C Y, SHEN Z L, et al. Headway compression oriented space-time trajectory optimization for high-speed railway trains[J]. Journal of the China Railway Society, 2021, 43(7): 10-18. | |
| 10 | 赵蒙, 于梦琦, 胡祥培.新零售背景下药品协同配送优化研究[J]. 系统工程理论与实践, 2021, 41(2): 297-309. |
| ZHAO M, YU M Q, HU X P. Optimization scheduling method of drug collaborative distribution under the background of new retail[J]. System Engineering – Theory & Practice, 2021, 41(2): 297-309. | |
| 11 | LOIS D, WANG Y, BOGGIO-MARZET A, et al. Multivariate analysis of fuel consumption related to eco-driving: interaction of driving patterns and external factors[J]. Transportation Research Part D: Transport and Environment, 2019, 72: 232-242. |
| 12 | 赵祥模, 张心睿, 王润民, 等. 网联交叉口信号-车辆轨迹协同优化控制方法[J]. 汽车工程, 2021, 43(11): 1577-1586. |
| ZHAO X M, ZHANG X R, WANG R M, et al. Cooperative optimization control method of traffic signals and vehicle trajectories at connected intersection[J]. Automotive Engineering, 2021, 43(11): 1577-1586. | |
| 13 | FONSECA J C, GABRIELA C S, NETO J M, et al. A multi-agent system for solving the dynamic capacitated vehicle routing problem with stochastic customers using trajectory data mining[J]. Expert Systems with Applications, 2022, 195, June 1. |
| 14 | KÜHLMORGEN S, LU H, FESTAG A, et al. Evaluation of congestion-enabled forwarding with mixed data traffic in vehicular communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 233-247. |
| 15 | REINOLSMANN N, ALHAJYASEEN W, BRIJS T, et al. Investigating the impact of dynamic merge control strategies on driving behavior on rural and urban expressways-a driving simulator study[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 65: 469-484. |
| 16 | WEI Y, AVCI C, LIU J, et al. Dynamic programming-based multi-vehicle longitudinal trajectory optimization with simplified car following models[J]. Transportation Research Part B: Methodological, 2017, 106: 102-129. |
| 17 | TANVIR S, CHASE R, ROUPAHIL N. Development and analysis of eco-driving metrics for naturalistic instrumented vehicles[J]. Journal of Intelligent Transportation Systems, 2021, 25(3): 235-248. |
| 18 | 王庞伟, 于洪斌, 张为, 等. 城市车路协同系统下实时交通状态评价方法[J]. 中国公路学报, 2019, 32(6): 176-187. |
| WANG P W, YU H B, ZHANG W, et al. Real-time traffic status evaluation method for urban cooperative vehicle infrastructure system[J]. China Journal of Highway and Transport, 2019, 32(6): 176-187. | |
| 19 | LI L, GAN J, ZHOU K, et al. A novel lane-changing model of connected and automated vehicles: using the safety potential field theory[J]. Physica A: Statistical Mechanics and Its Applications, 2020, 559: 125039. |
| 20 | WANG P W, WANG Y F, WANG X, et al. An intelligent actuator of an indoor logistics system based on multi-sensor fusion[J]. Actuators, 2021, 10(6): 120. |
| 21 | 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33(7): 156-166. |
| HUANG L, GUO H C, ZHANG R H, et al. LSTM-based lane-changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33(7): 156-166. | |
| 22 | YAO H D, LI X P. Lane-change-aware connected automated vehicle trajectory optimization at a signalized intersection with multi-lane roads[J]. Transportation Research Part C: Emerging Technologies, 2021, 129. |
| 23 | PATLE B K, JHA A, PANDEY A, et al. The optimized path for a mobile robot using fuzzy decision function[J]. Materials Today: Proceedings, 2019, 18(7): 3575-3581. |
| 24 | LIU Y, ZHANG X J, GUAN X M, et al. Adaptive sensitivity decision based path planning algorithm for unmanned aerial vehicle with improved particle swarm optimization[J]. Aerospace Science and Technology, 2016(58): 92-102. |
| 25 | 张哲, 丁海涛, 张袅娜, 等.智能网联电动汽车经济性巡航速度规划[J]. 汽车工程, 2022, 44(4): 609-616,637. |
| ZHANG Z, DING H T, ZHANG N N, et al. Economic cruising speed planning of intelligent network connected electric vehicle[J]. Automotive Engineering, 2022, 44(4): 609-616,637. | |
| 26 | WANG P W, DENG H, ZHANG J, et al. Model predictive control for connected vehicle platoon under switching communication topology[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7817-7830. |
| 27 | 王树凤,孙文盛,刘宗锋.车辆稳定换道时的侧向加速度分析[J].机械设计与制造, 2020, 7: 17-20,24. |
| WANG S F, SUN W S, LIU Z F. Analysis on lateral acceleration of lane changing in vehicle stability[J]. Machinery Design & Manufacture, 2020, 7:17-20,24. | |
| 28 | SWIDAN H. Integrating AIMSUN micro simulation model with portable emissions measurement system (PEMS): calibration and validation case study[D]. North Carolina State University, 2011. |
| 29 | AKCELIK R. Efficiency and drag in the power-based model of fuel consumption[J]. Transportation Research Part B: Methodological, 1989, 23(5): 376-385. |
| [1] | 胡林,谷子逸,王丹琦,王方,邹铁方,黄晶. 汽车安全性测评规程现状及趋势展望[J]. 汽车工程, 2024, 46(2): 187-200. |
| [2] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [3] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [4] | 李升波,占国建,蒋宇轩,兰志前,张宇航,邹文俊,陈晨,成波,李克强. 类脑学习型自动驾驶决控系统的关键技术[J]. 汽车工程, 2023, 45(9): 1499-1515. |
| [5] | 刘济铮,王震坡,孙逢春,张雷. 异构智能网联汽车编队延迟补偿控制研究[J]. 汽车工程, 2023, 45(9): 1573-1582. |
| [6] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [7] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [8] | 朱冰,姜泓屹,赵健,韩嘉懿,刘彦辰. 智能网联汽车协同感知信任度动态计算与评价方法[J]. 汽车工程, 2023, 45(8): 1383-1391. |
| [9] | 关宇昕,冀浩杰,崔哲,李贺,陈丽文. 智能网联汽车车载CAN网络入侵检测方法综述[J]. 汽车工程, 2023, 45(6): 922-935. |
| [10] | 胡耘浩,李克强,向云丰,石佳,罗禹贡. 智能网联汽车通用跨平台实时仿真系统架构及应用[J]. 汽车工程, 2023, 45(3): 372-381. |
| [11] | 刘浩天,魏洪乾,时培成,张幽彤. 基于帧间隔-总线电压混合特征的汽车ECU伪装攻击识别[J]. 汽车工程, 2023, 45(11): 2070-2081. |
| [12] | 李捷,吴晓东,许敏,刘永刚. 基于强化学习的城市场景多目标生态驾驶策略[J]. 汽车工程, 2023, 45(10): 1791-1802. |
| [13] | 钱立军,陈晨,陈健,陈欣宇,熊驰. 基于Q学习模型的无信号交叉口离散车队控制[J]. 汽车工程, 2022, 44(9): 1350-1358. |
| [14] | 钟文沁,孔伟伟,李志恒,于杰,罗禹贡. 不同渗透率下非信控交叉路口混合预约多车协同控制[J]. 汽车工程, 2022, 44(8): 1144-1152. |
| [15] | 陈一鹤,孔伟伟,于杰,李克强,罗禹贡. 混合交通下非信控交叉口队列预约式控制[J]. 汽车工程, 2022, 44(7): 953-959. |
|