汽车工程 ›› 2024, Vol. 46 ›› Issue (2): 201-210.doi: 10.19562/j.chinasae.qcgc.2024.02.002
关书睿1,李克强1,周俊宇1,石佳1,孔伟伟2,罗禹贡1( )
)
Shurui Guan1,Keqiang Li1,Junyu Zhou1,Jia Shi1,Weiwei Kong2,Yugong Luo1()
摘要:
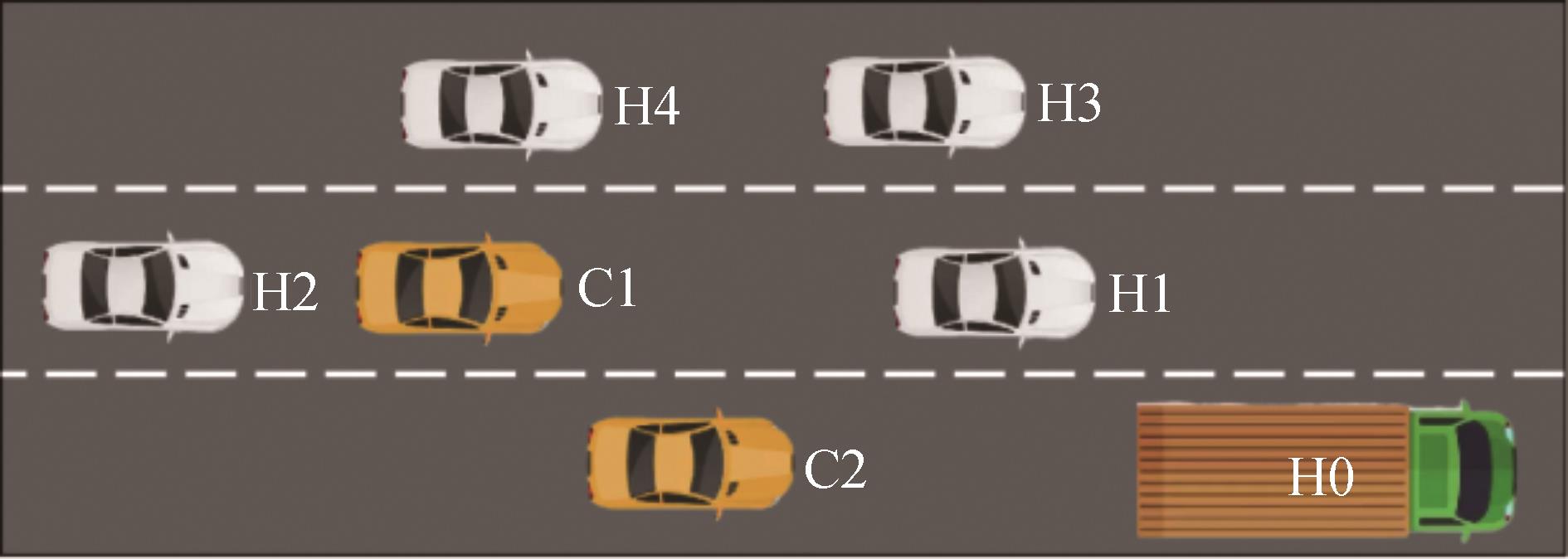
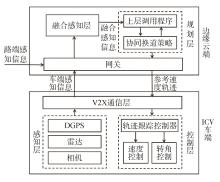
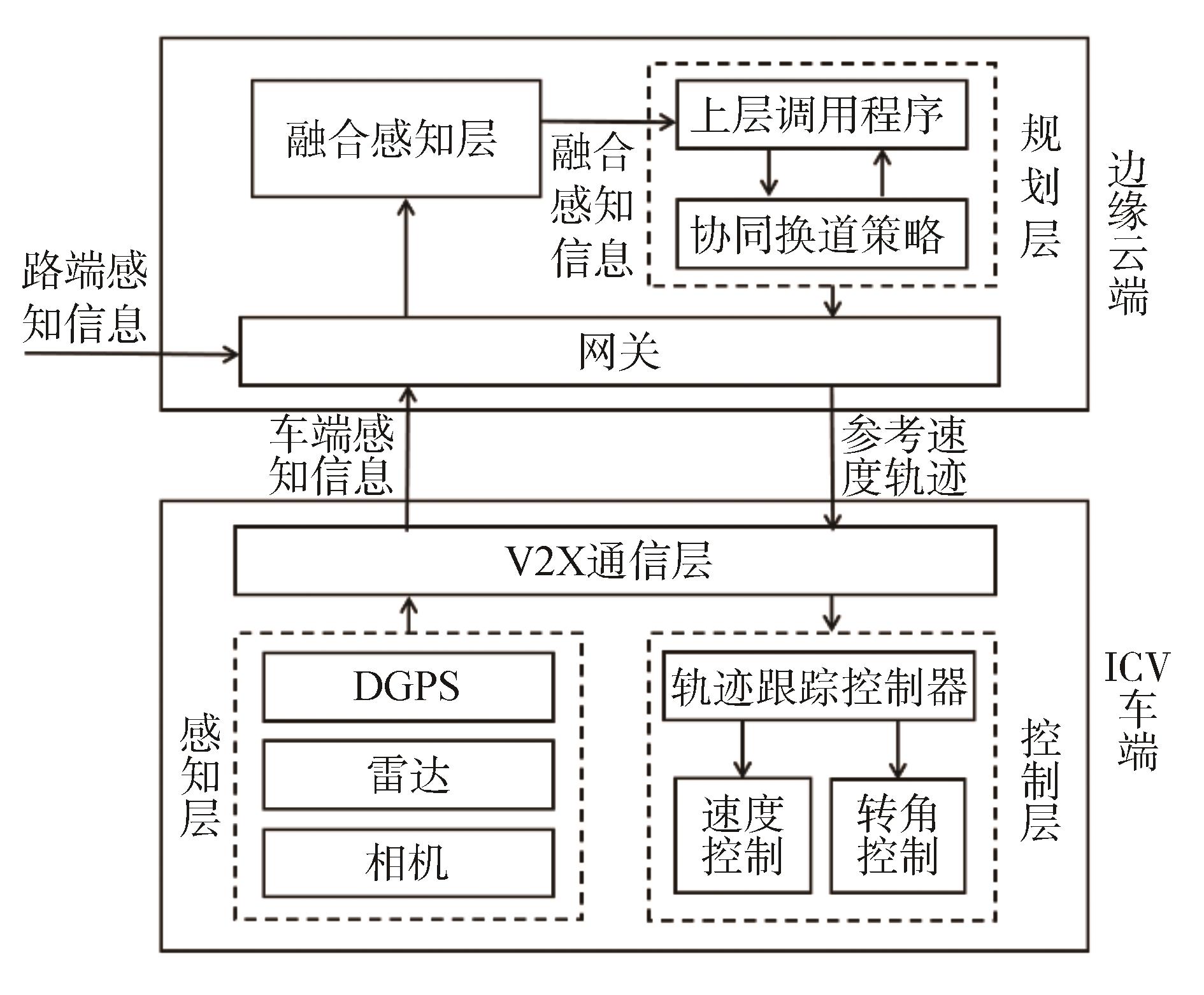
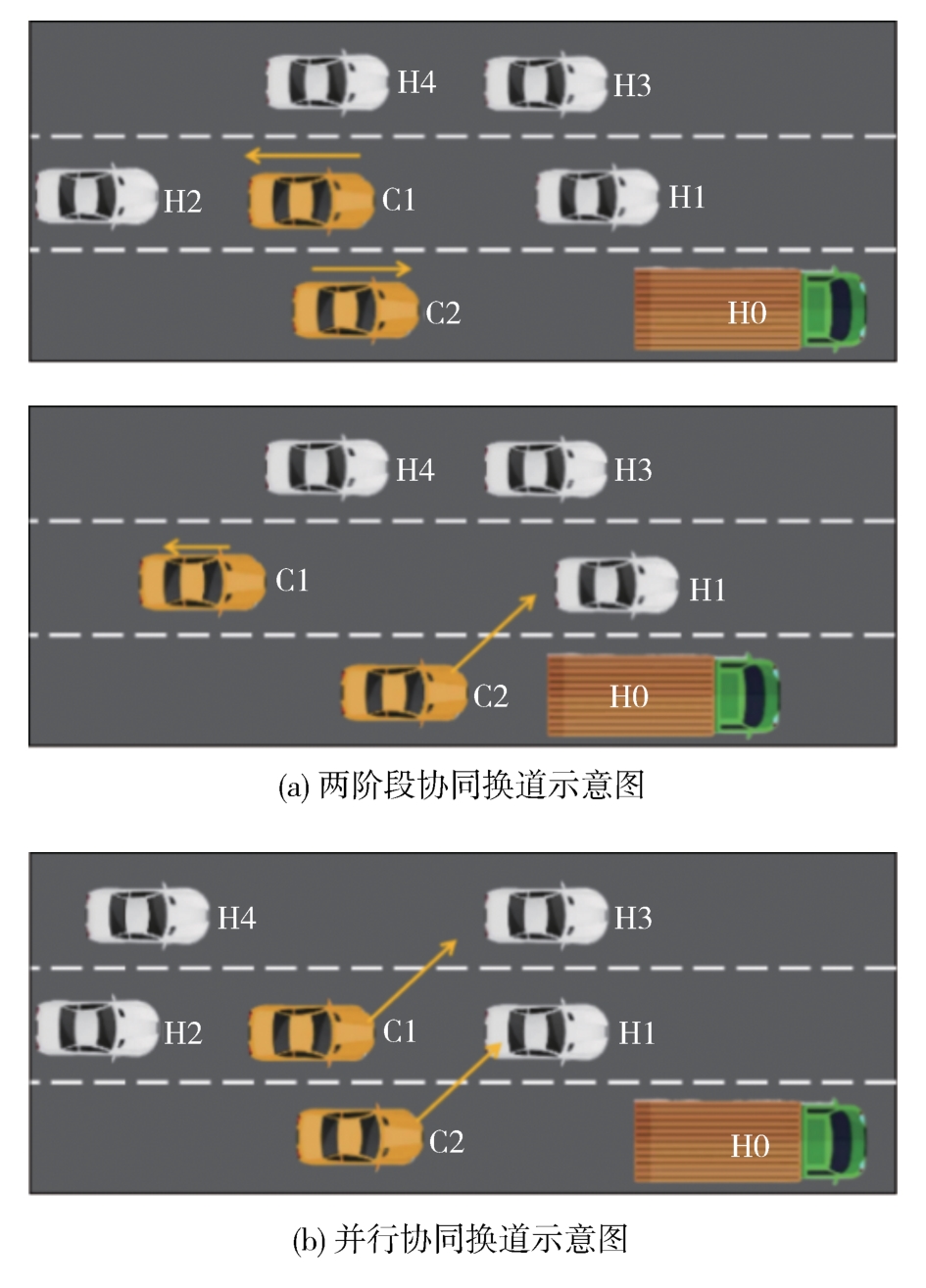
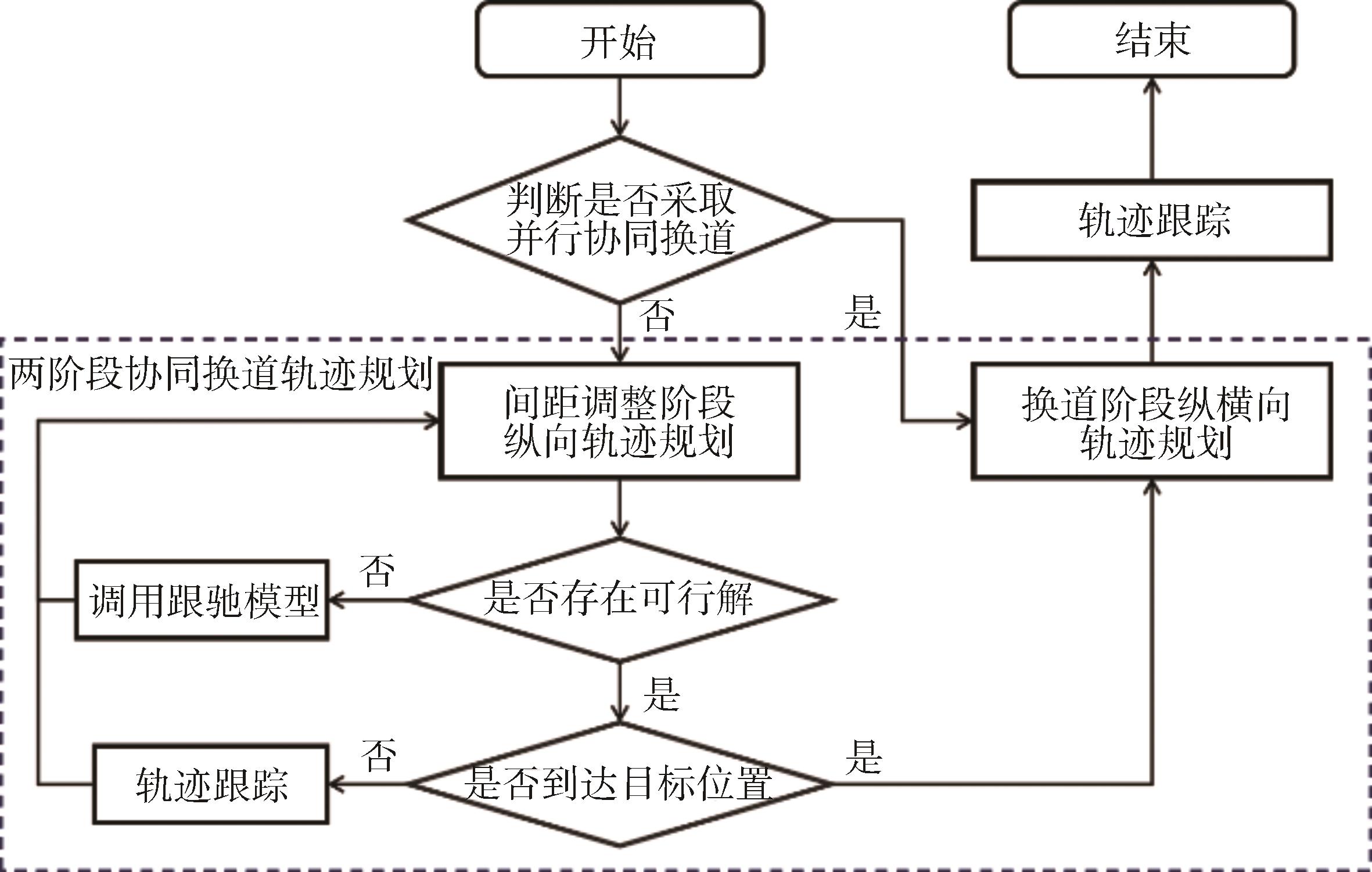
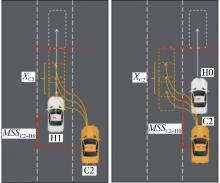
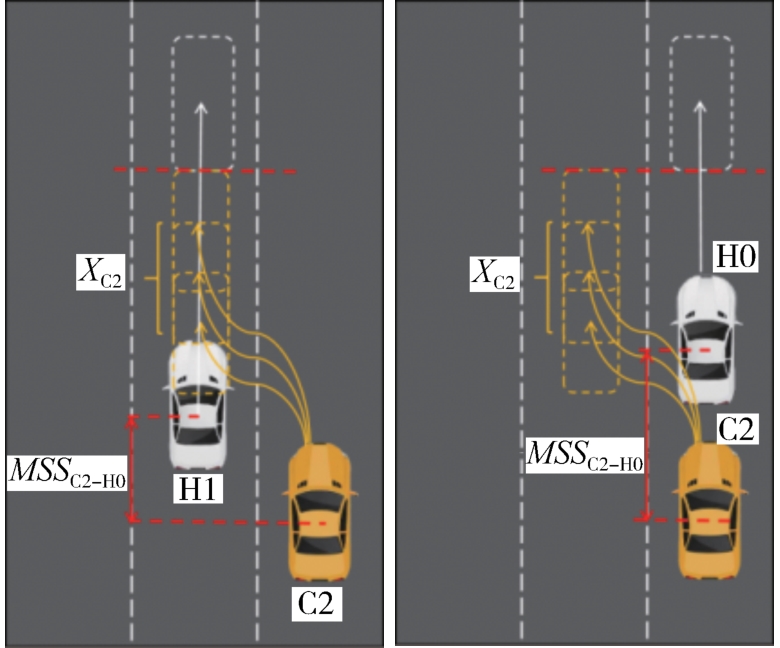
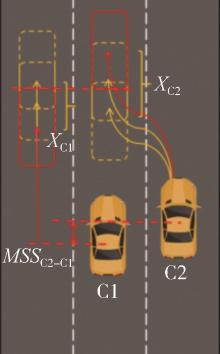
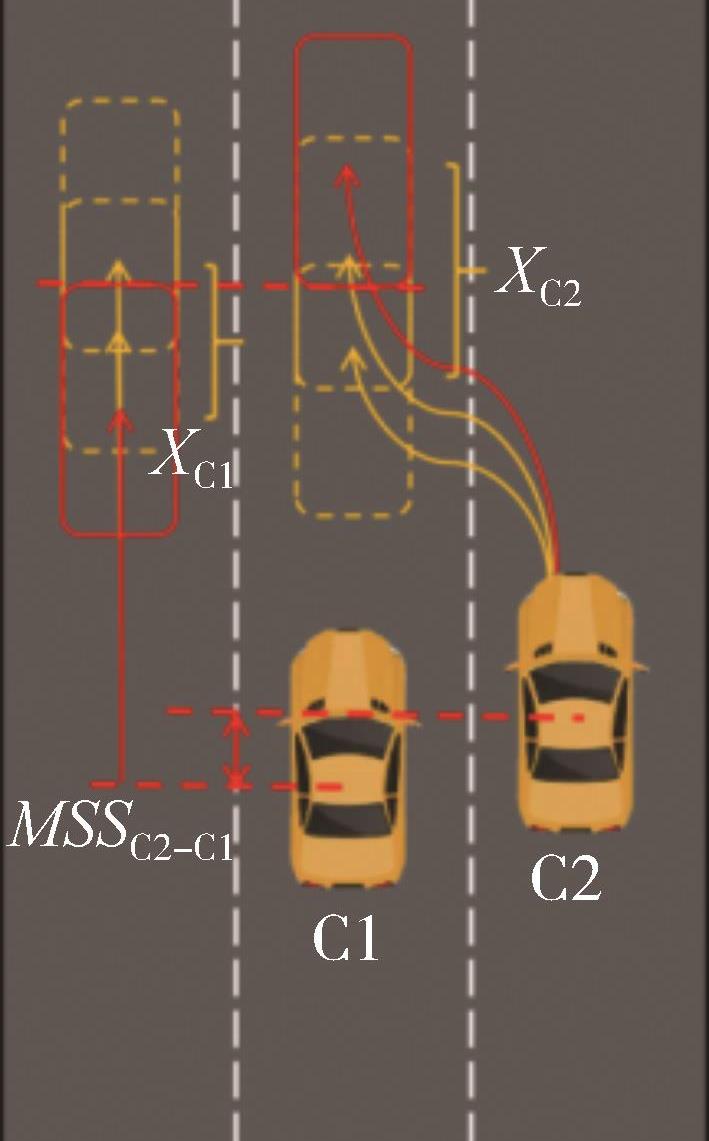
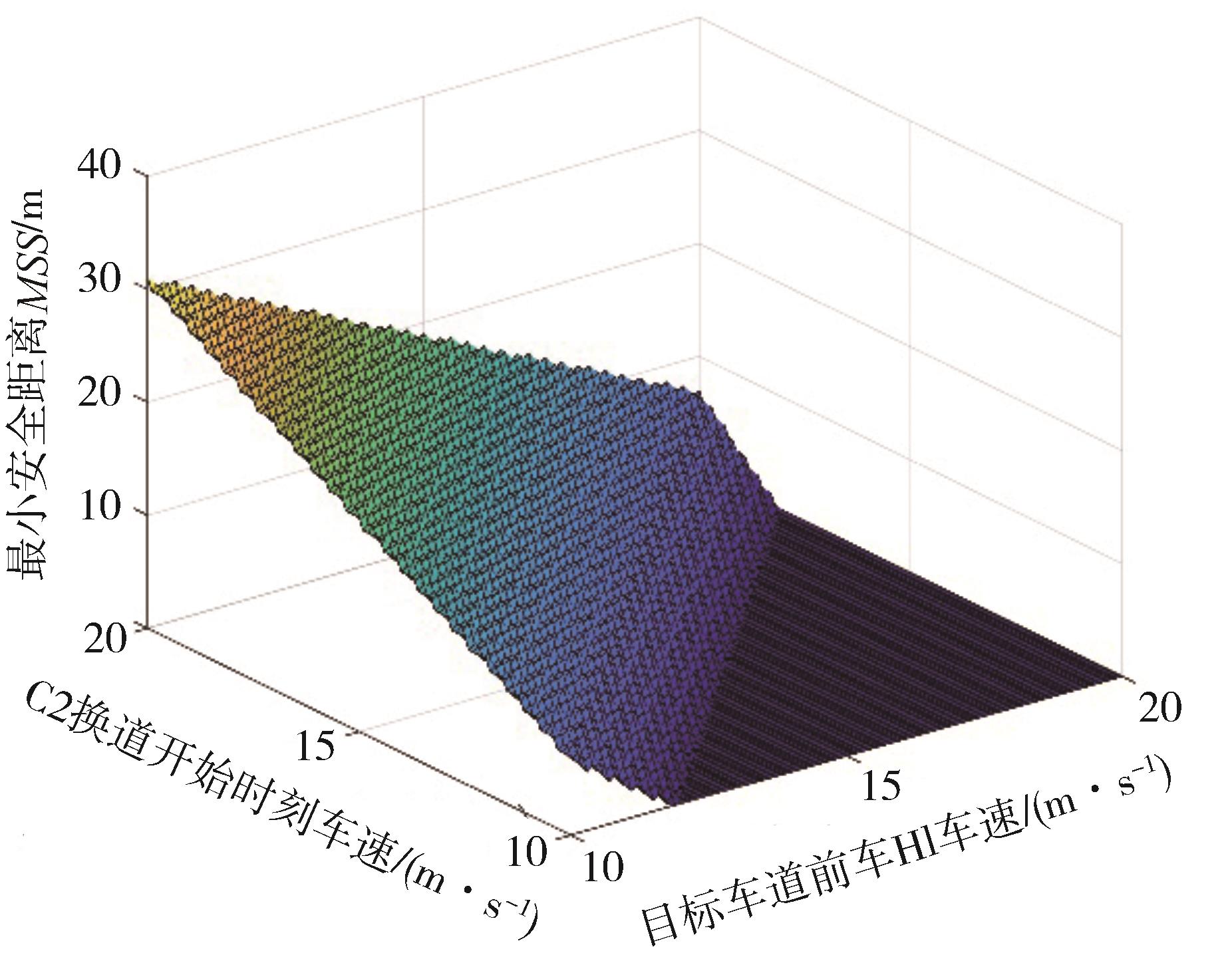
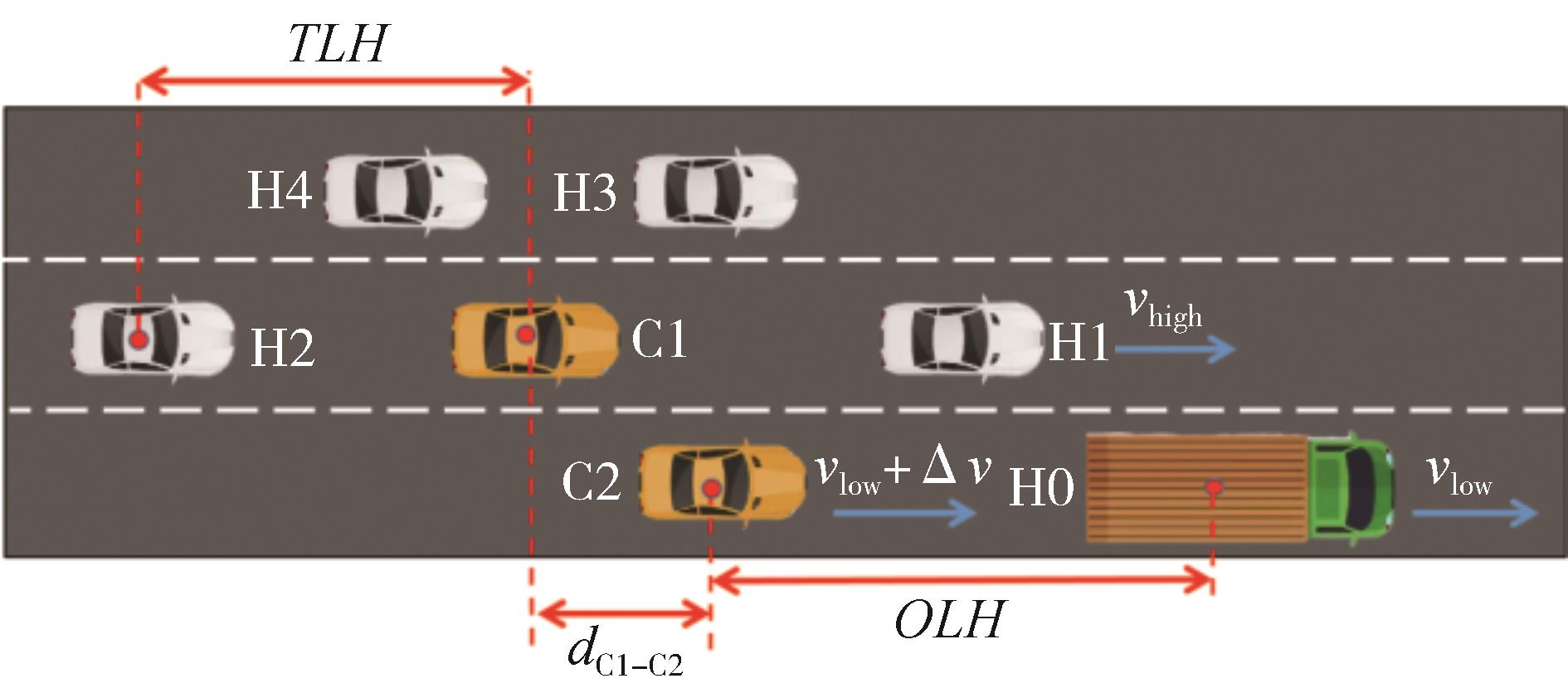
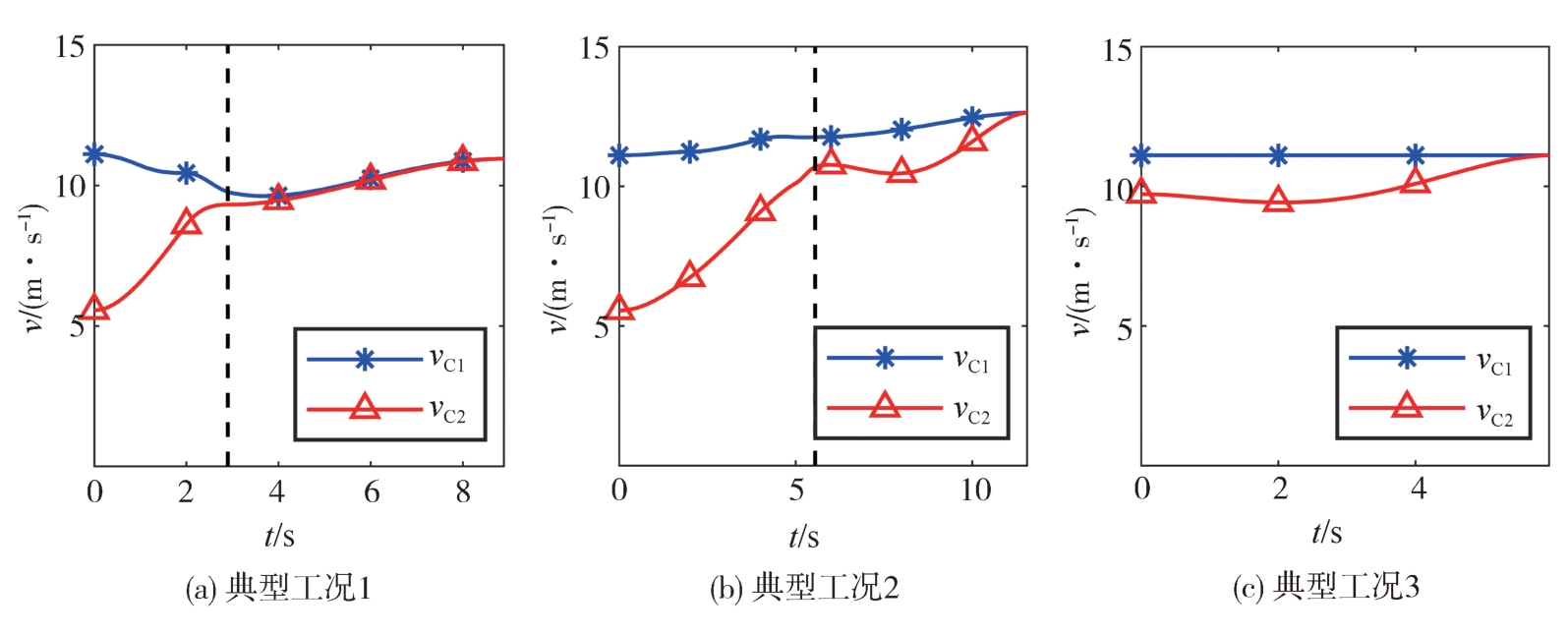
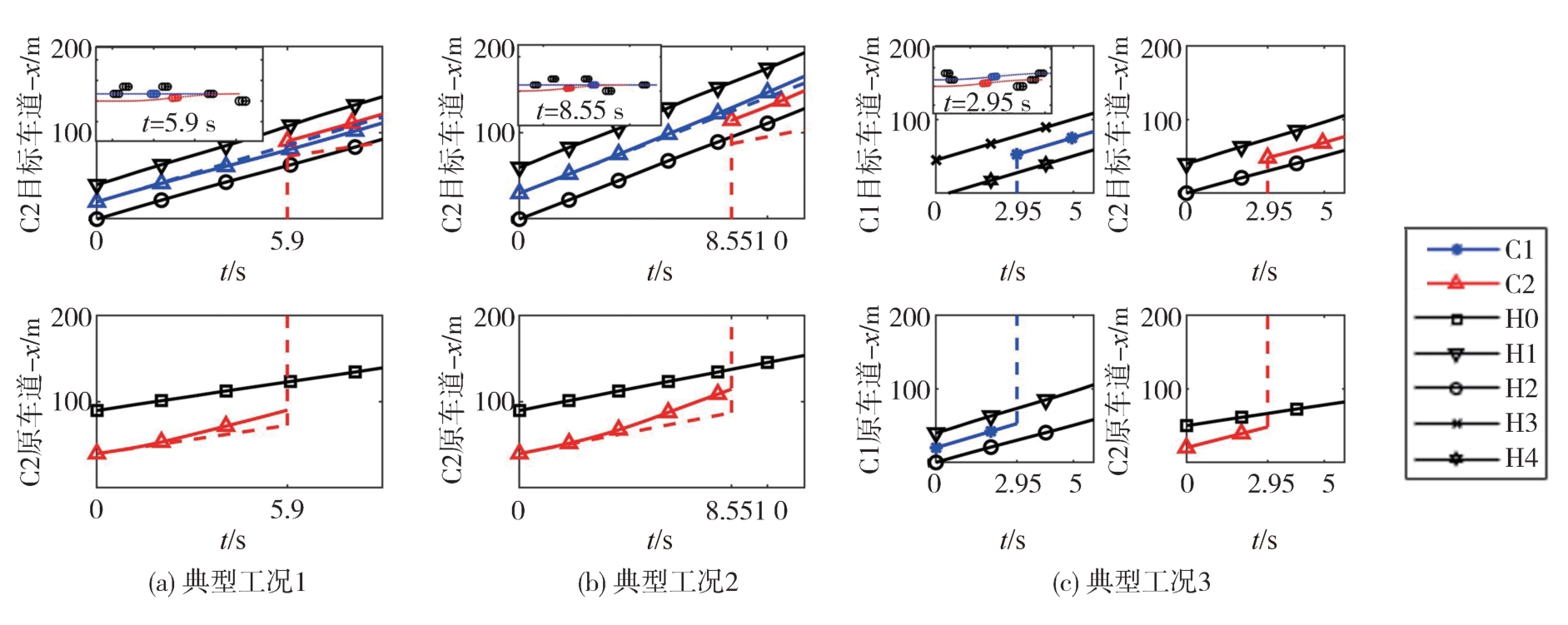
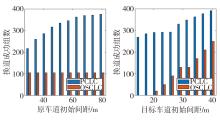
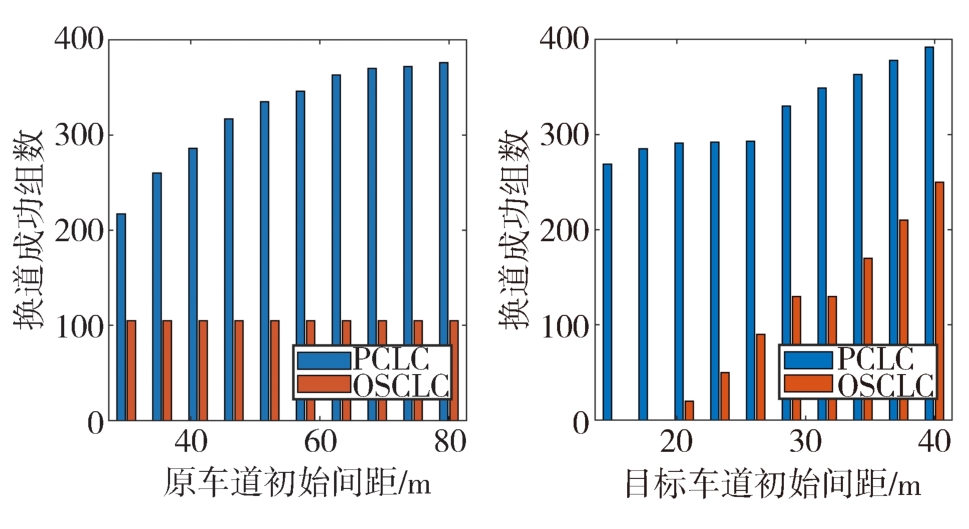
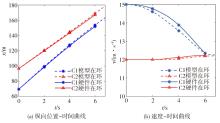
智能网联汽车的协同换道技术已得到广泛研究,但现有协同换道策略难以解决强制换道场景下的车辆协同问题,或对上游交通造成的负面影响较大。本文旨在面向强制换道场景需求,提出一种考虑理论最小安全距离的两阶段协同换道策略。首先,提出了两车协同换道系统控制架构,并面向车辆强制换道场景制定了协同换道方案。随后,设计了间距调整、协同换道两阶段的滚动时域轨迹规划方法,并求解理论最小安全距离作为间距调整阶段末态约束,解决了现有研究间距策略保守的问题。最后,通过仿真与硬件在环试验验证了所提策略的有效性、优越性与计算实时性。结果表明,所提策略可有效提升换道成功率,在保障换道安全性的条件下降低了换道行为对交通的影响,且在实际边缘云平台的实时计算、通信环境下具备可用性。