汽车工程 ›› 2023, Vol. 45 ›› Issue (8): 1320-1332.doi: 10.19562/j.chinasae.qcgc.2023.08.003
所属专题: 智能网联汽车技术专题-控制2023年
边有钢1,2,张田田1,谢和平1,3,秦洪懋1,2( ),杨泽宇1,2
),杨泽宇1,2
收稿日期:2023-05-05
修回日期:2023-06-16
出版日期:2023-08-25
发布日期:2023-08-17
通讯作者:
秦洪懋
E-mail:qinhongmao@vip.sina.com
基金资助:
Yougang Bian1,2,Tiantian Zhang1,Heping Xie1,3,Hongmao Qin1,2(),Zeyu Yang1,2
Received:2023-05-05
Revised:2023-06-16
Online:2023-08-25
Published:2023-08-17
Contact:
Hongmao Qin
E-mail:qinhongmao@vip.sina.com
摘要:
本文研究过弯场景下车辆队列的抗扰抗内切协同路径跟踪控制方法。首先,基于前车直接跟随式方案,采用圆弧曲线跟踪路径代替一般直线跟踪路径,构建车辆队列过弯抗内切策略,以降低车辆队列过弯时的整体跟踪误差;其次,设计卡尔曼滤波器和龙伯格观测器,以解决跟随车位置状态噪声及航向状态噪声或不易量测的问题;然后,设计协同路径跟踪控制器,并基于李雅普诺夫稳定性理论导出系统稳定的充分条件,指导控制器参数设计;最后,通过数值仿真和实车试验验证控制器设计的可行性和有效性。
边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332.
Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon[J]. Automotive Engineering, 2023, 45(8): 1320-1332.
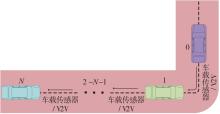
图1
车辆队列过弯行驶示意图"
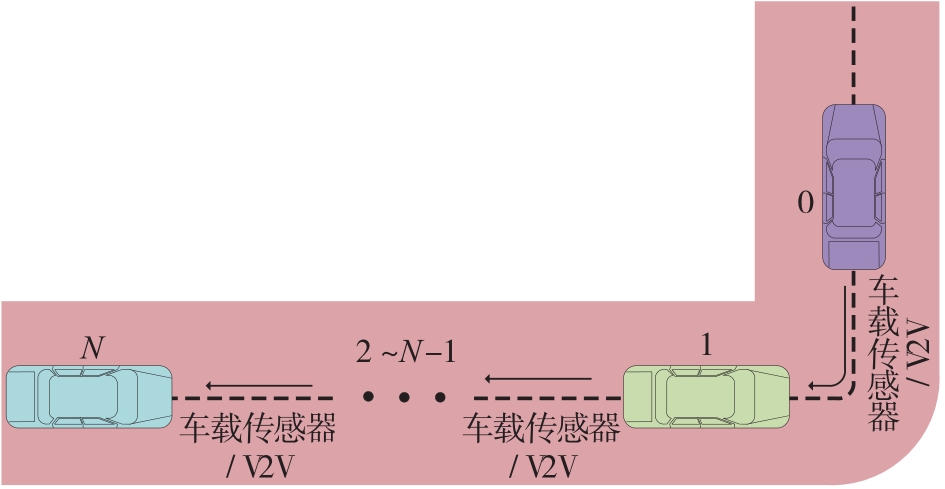
图2
观测器框架图"
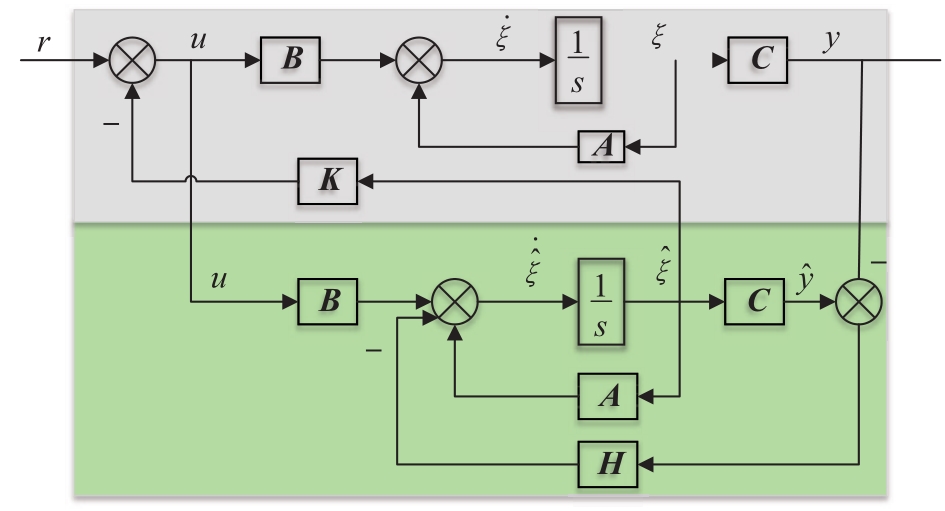
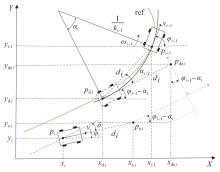
图3
抗内切过弯策略图"
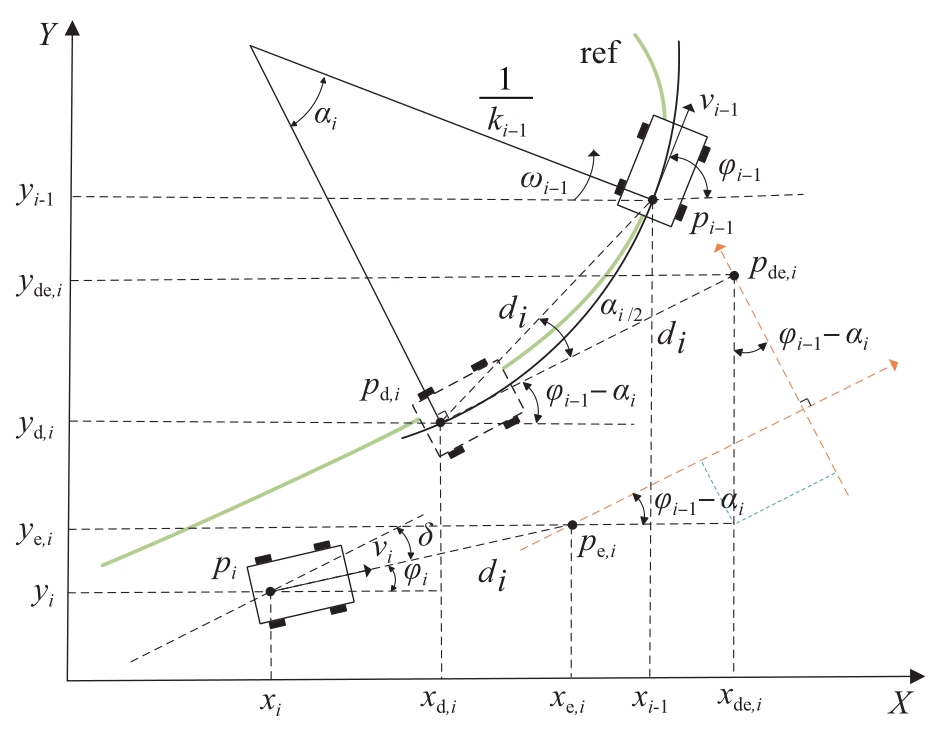
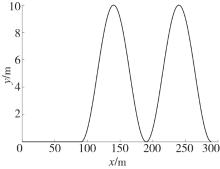
图4
仿真路径"
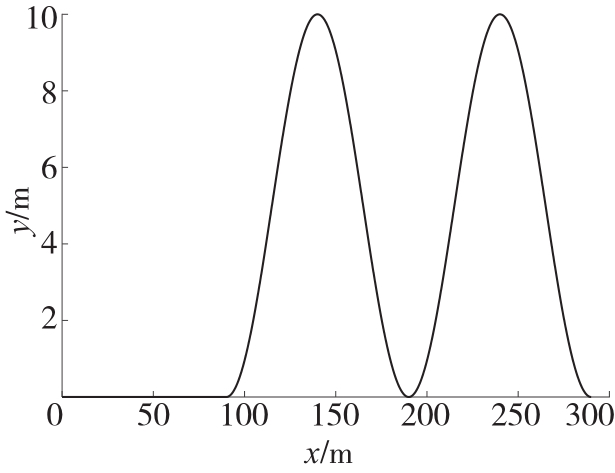
表1
仿真用车队控制器参数"
| 项目 | 参数 | 数值 |
|---|---|---|
| 领航车 | PID控制器 | |
| 预瞄常数 | 2 m | |
| 预瞄系数 | 0.2 | |
| 跟随车 | 控制增益 | |
| 跟车时距 | 0.2 s |
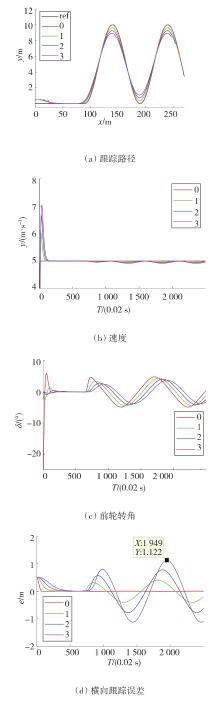
图5
场景1仿真"
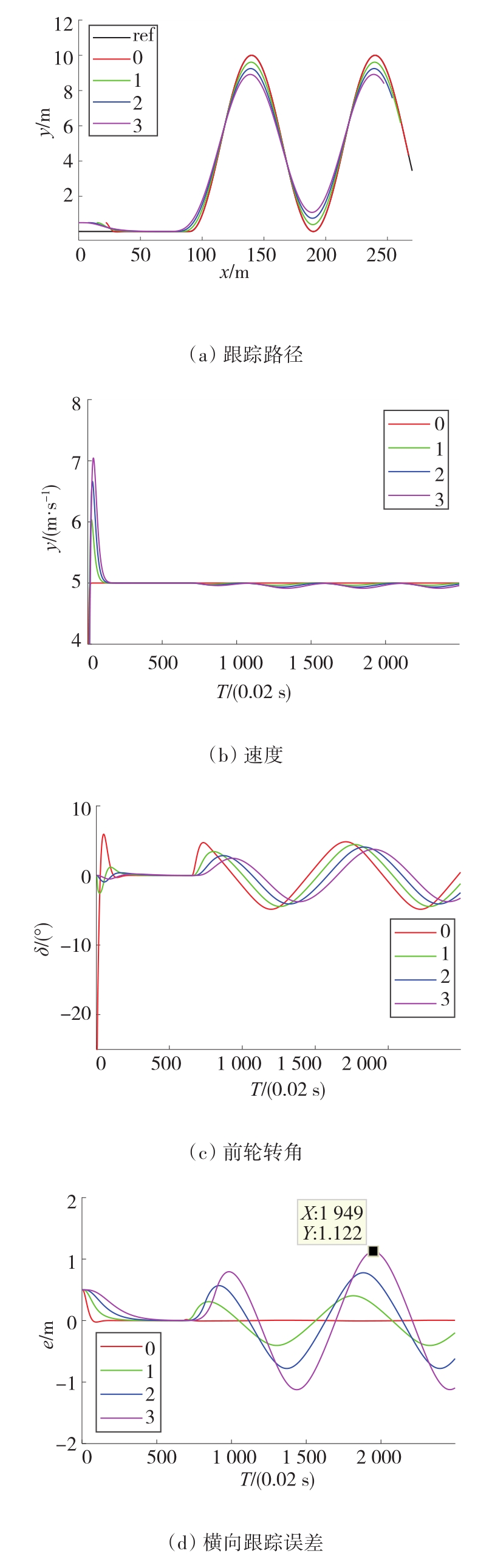
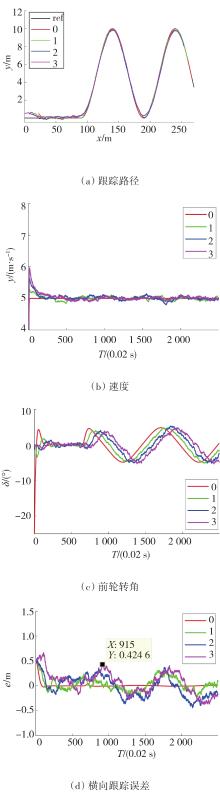
图6
场景2仿真"
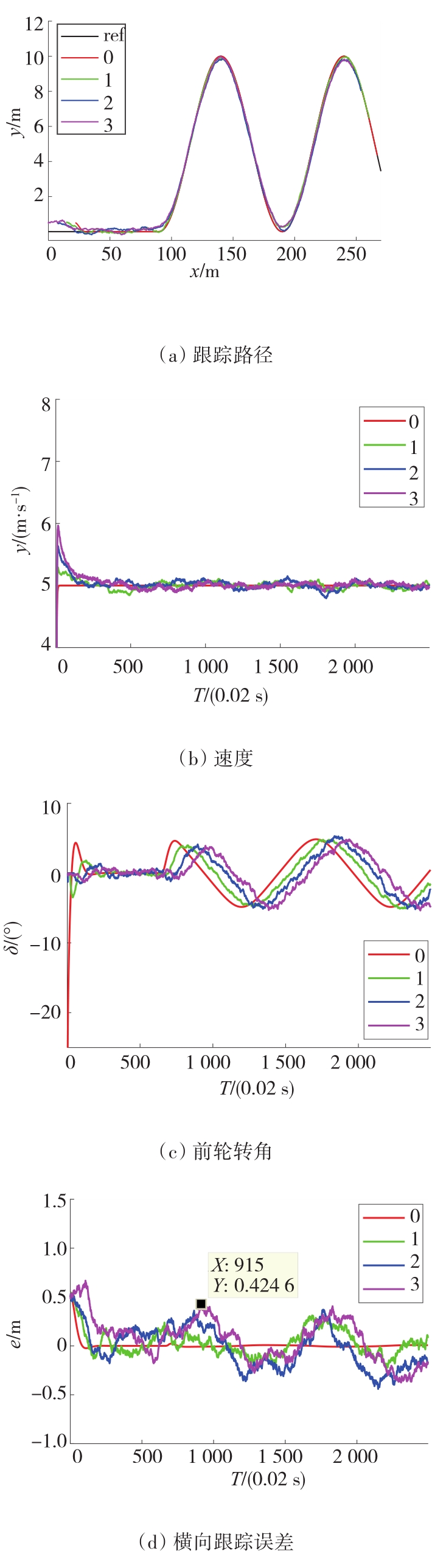
表2
仿真用滤波器参数"
| 参数 | 数值 |
|---|---|
| 过程噪声协方差矩阵 | |
| 测量噪声协方差矩阵 | |
| 误差协方差矩阵 |
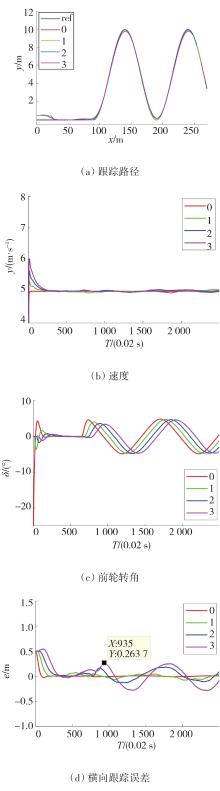
图7
场景3仿真"
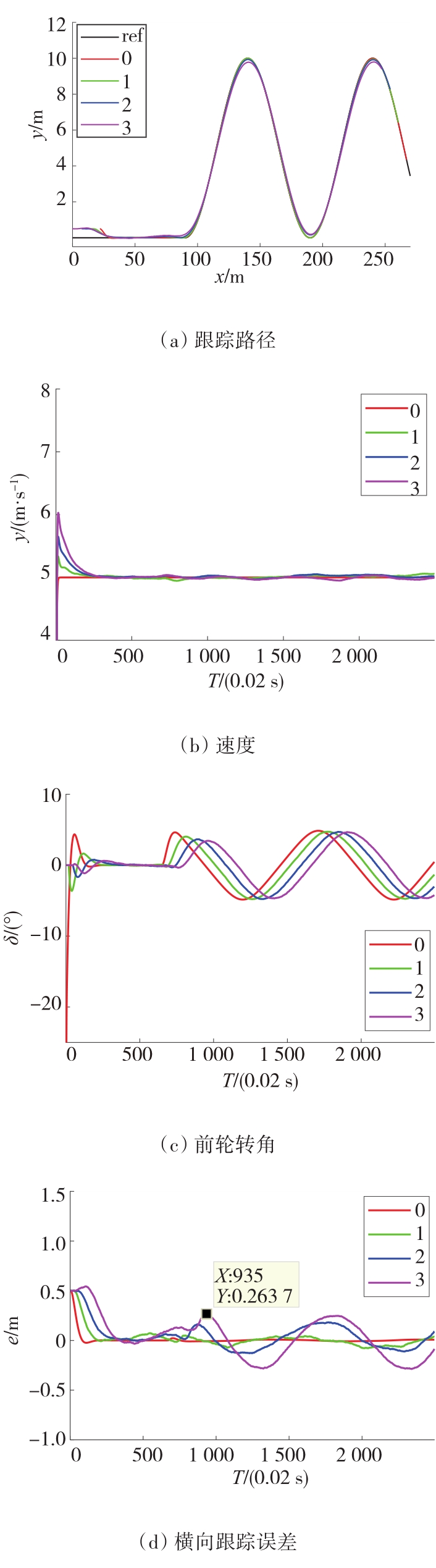
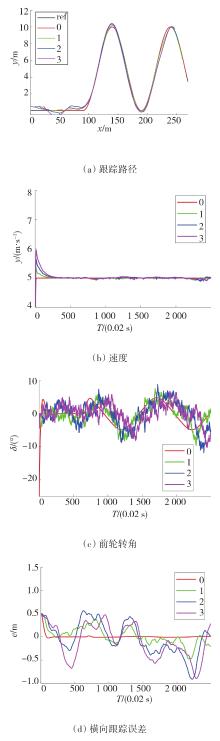
图8
场景4仿真"
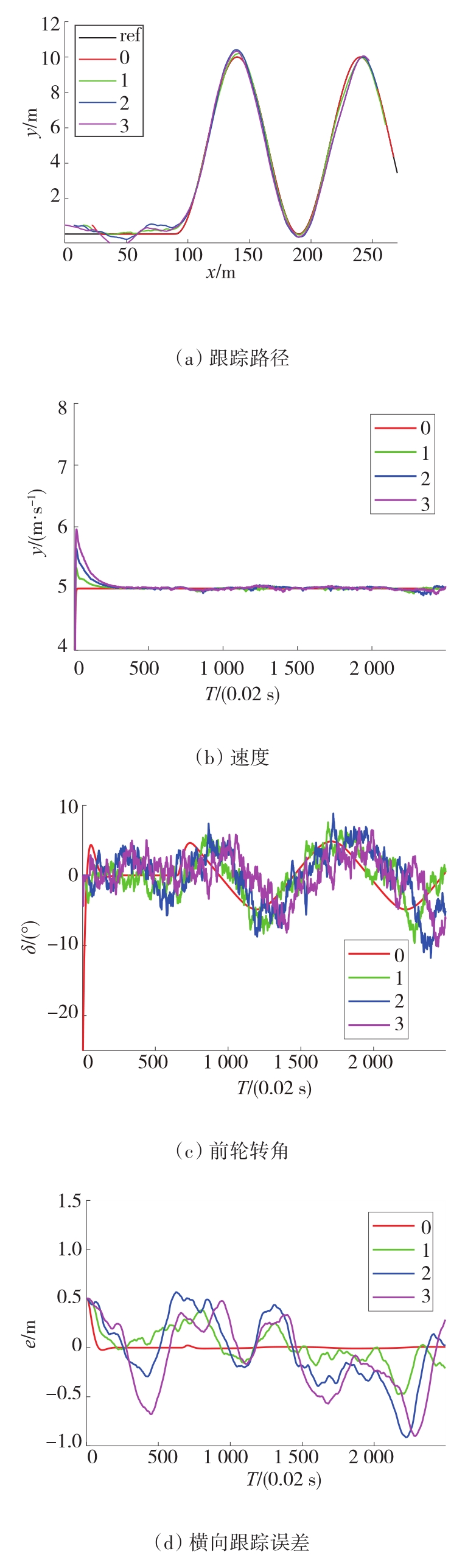
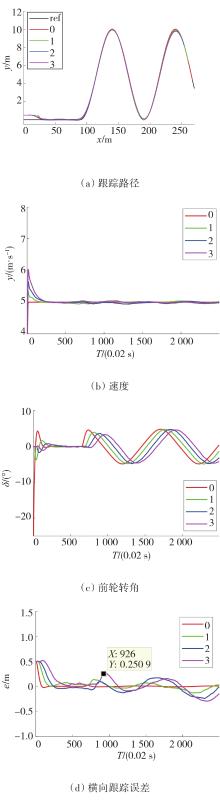
图9
场景5仿真"
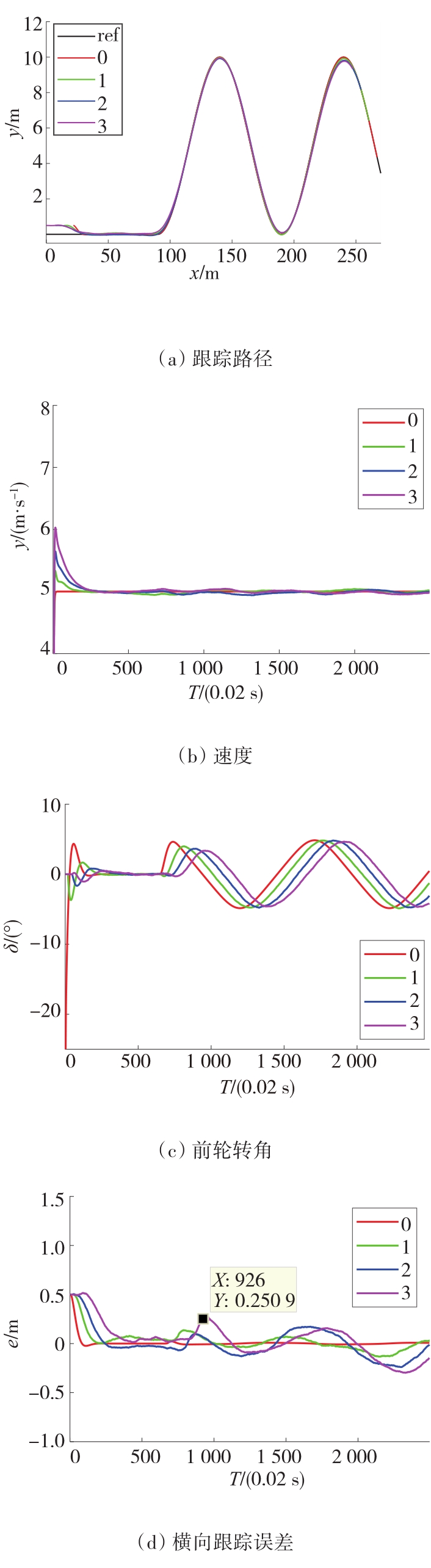

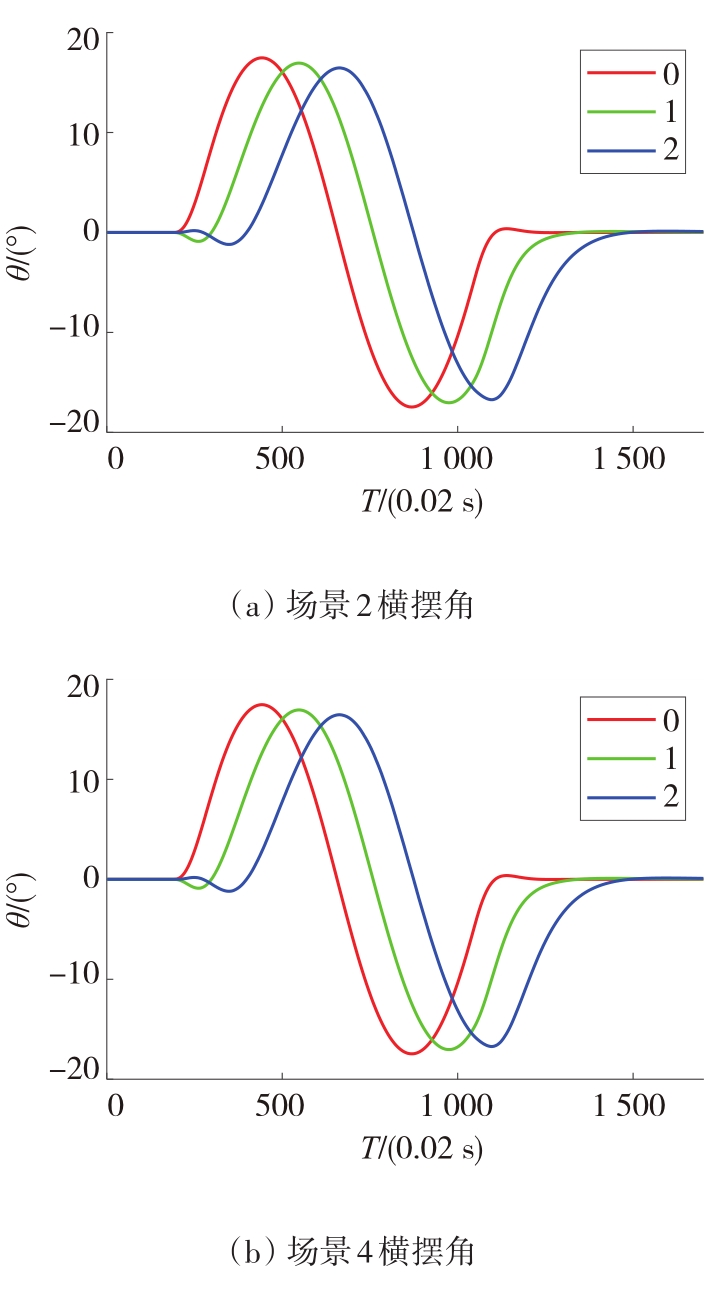
图10
仿真横摆角"
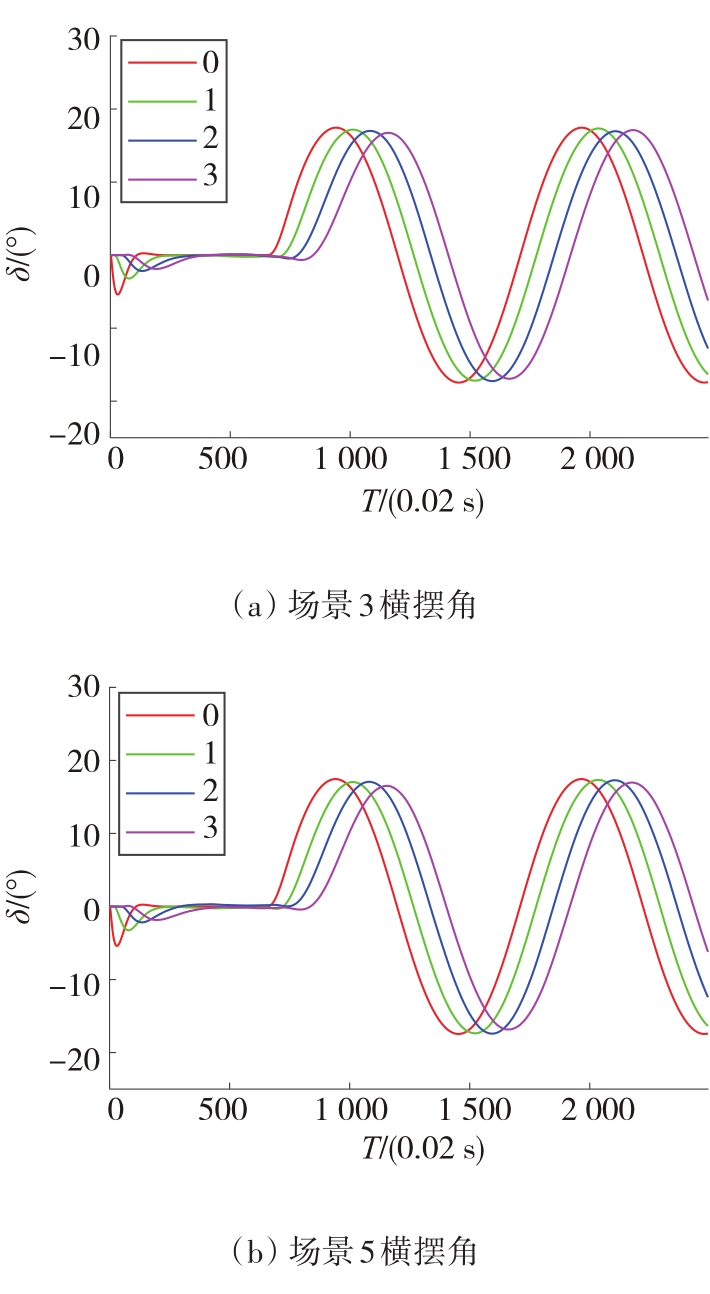

图11
队列实车测试实物"

图12
实车试验路径"
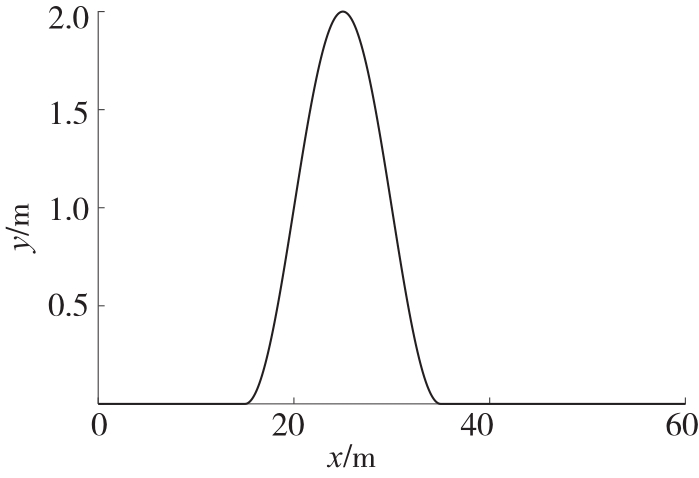
表3
实车试验用车辆控制器参数"
| 项目 | 参数 | 数值 |
|---|---|---|
| 领航车 | PID控制器 | |
| 预瞄常数 | 1.2 | |
| 预瞄系数 | 0.1 | |
| 跟随车 | 反馈增益 | |
| 停车间距 | 1.26 m | |
| 跟车时距 | 0.2 s |
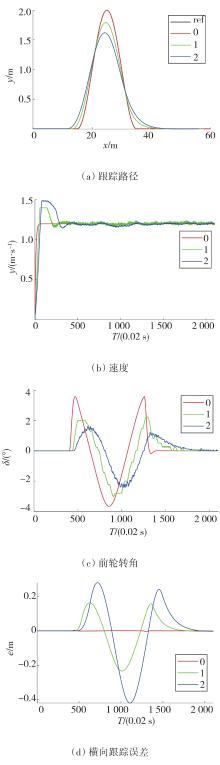
图13
场景1实车试验"
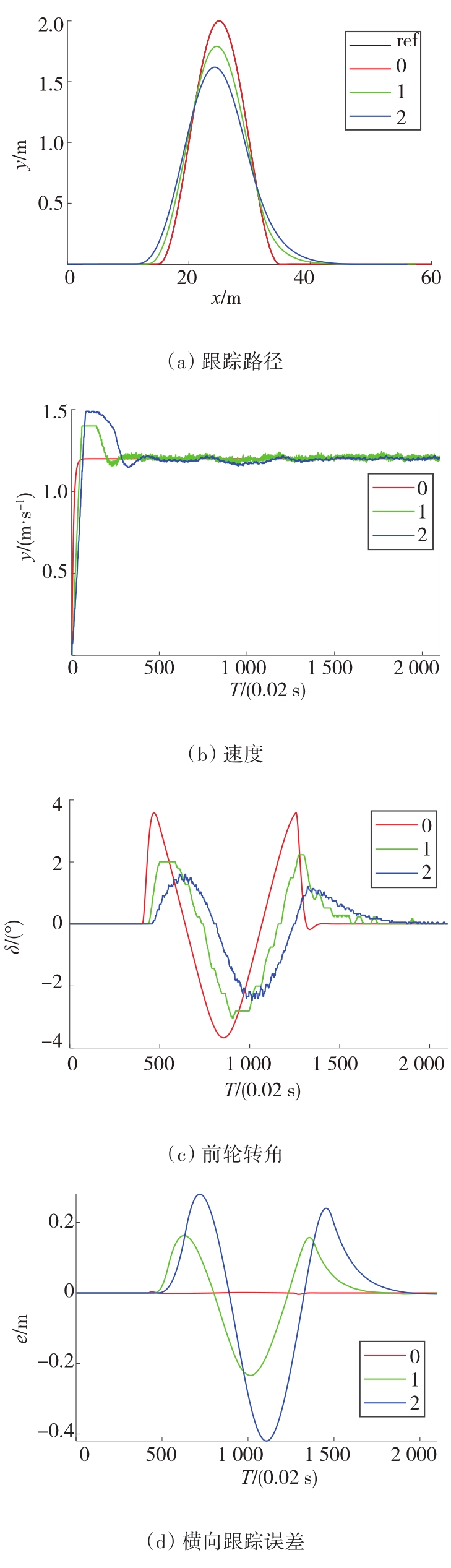
图14
场景2实车试验"
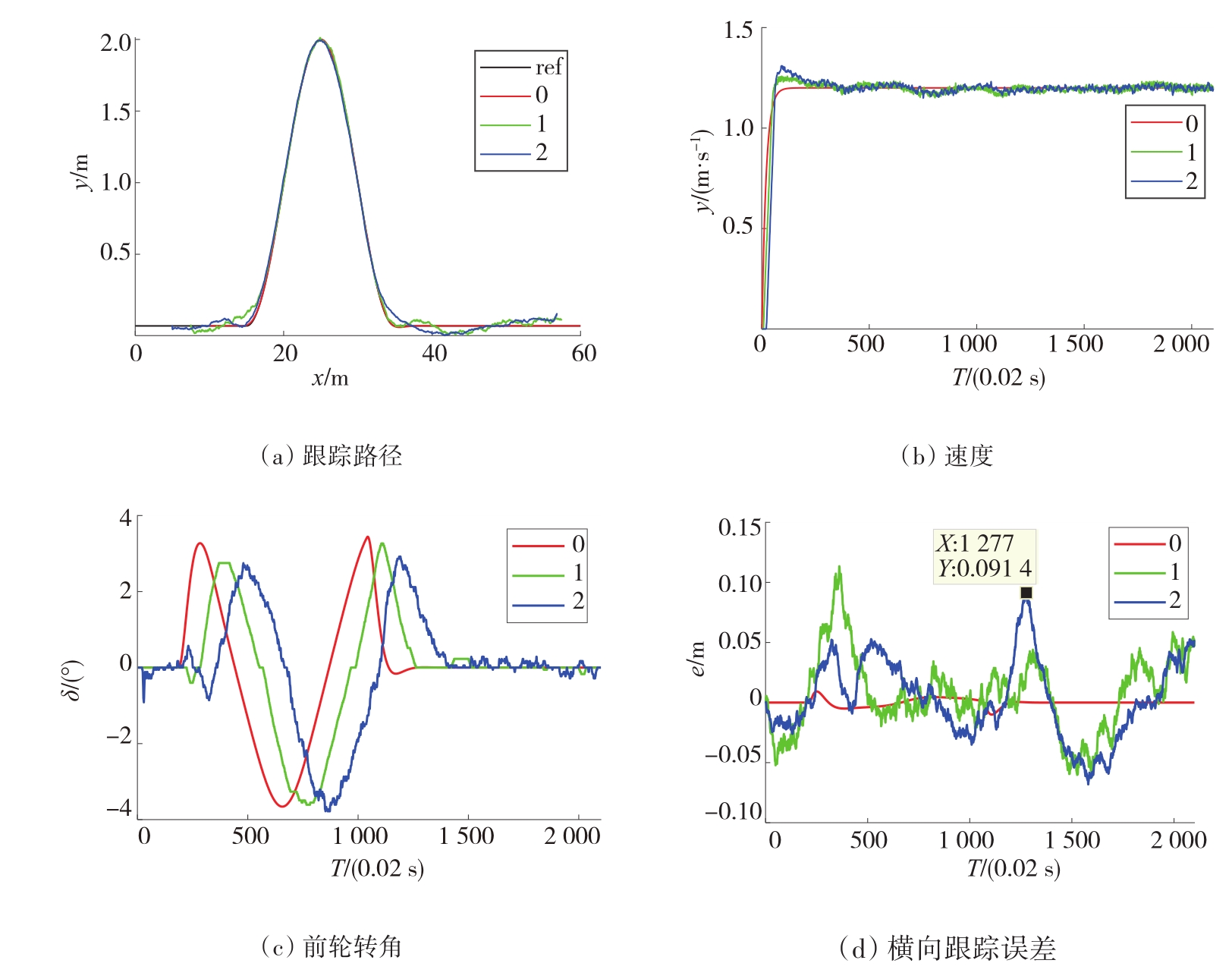
表4
实车试验用滤波器和观测器参数"
| 参数 | 数值 |
|---|---|
| 过程噪声协方差矩阵 | |
| 测量噪声协方差矩阵 | |
| 误差协方差矩阵 | |
| 观测器增益 |
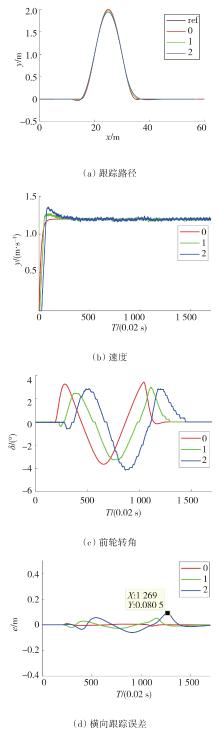
图15
场景4实车试验"
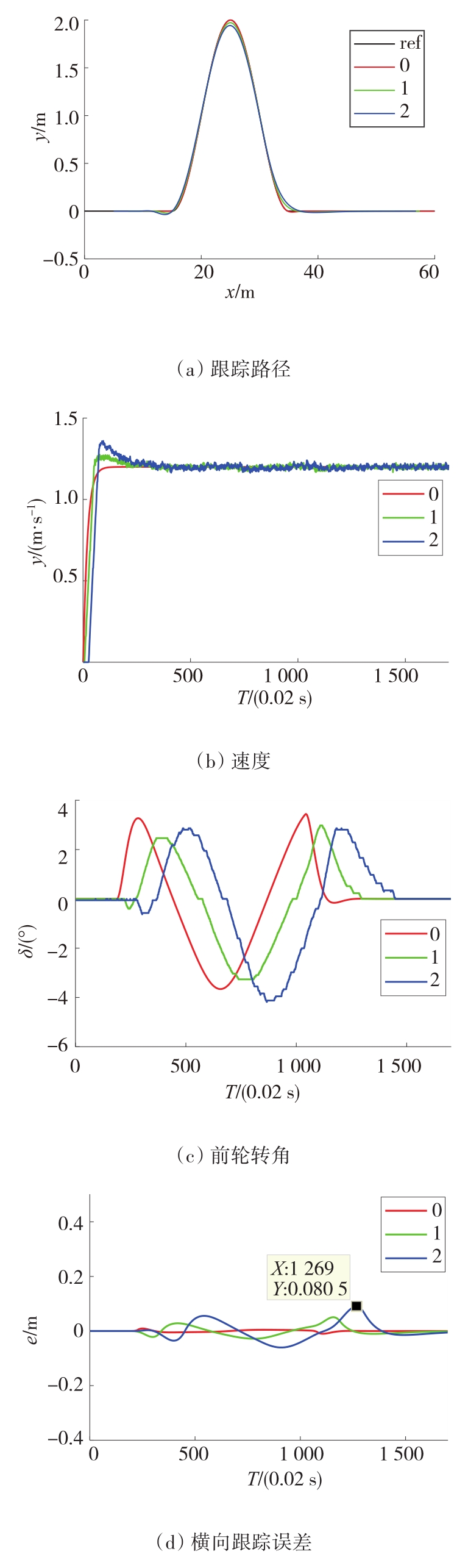

图16
实车试验横摆角"
| 1 | ZHUANG H, CHEN X, WANG C, et al. Lateral control method of the follower vehicle in local decentralized platooning[C]. 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI). IEEE, 2021: 1-5. |
| 2 | ZHUANG W, XU L, YIN G. Robust cooperative control of multiple autonomous vehicles for platoon formation considering parameter uncertainties[J]. Automotive Innovation, 2020, 3: 88-100. |
| 3 | 马芳武, 王佳伟, 杨昱, 等. 网联车辆协同编队控制系统研究[J]. 汽车工程, 2020, 42(7): 860-866. |
| MA F W, WANG J W, YANG Y, et al. Research on networked-vehicle cooperative platoon control system[J]. Automotive Engineering, 2020, 42(7): 860-866. | |
| 4 | HU M, LI C, BIAN Y, et al. Fuel economy-oriented vehicle platoon control using economic model predictive control[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (11): 20836-20849. |
| 5 | ZHANG Y, LI S E, et al. String stability for vehicular platoon control: definitions and analysis methods[J]. Annual Reviews in Control, 2019, 47: 81-97. |
| 6 | REN P, JIANG H, XU X. Research on a cooperative adaptive cruise control (CACC) algorithm based on frenet frame with lateral and longitudinal directions[J]. Sensors, 2023, 23(4): 1888. |
| 7 | 余伶俐, 况宗旭, 王正久, 等. 智能车辆队列横纵向有限时间滑模控制[J]. 控制理论与应用, 2021, 38(8): 1299-1312. |
| YU L L, KUANG Z X, WANG Z J, et al. Intelligent vehicle platoon lateral and longitudinal control based on finite-time sliding mode control[J]. Journal of Control Theory and Applications, 2021, 38(8): 1299-1312. | |
| 8 | KIM D, LEE J, KIM B, et al. Integrated risk management based automated vehicle following system on inner-city streets[C]. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE, 2014: 418-423. |
| 9 | 刘阳, 宗长富, 郑宏宇, 等. 基于参考向量场的车辆队列二维跟踪控制算法[J]. 汽车工程, 2021, 43(7): 962-970. |
| LIU Y, ZONG C F, ZHENG H Y, et al. Two⁃dimensional tracking control algorithm for vehicle platoon based on reference vector field[J]. Automotive Engineering, 2021, 43(7): 962-970. | |
| 10 | 黄健飞, 马彦. 基于跟随领航者的车辆自适应编队控制[J]. 吉林大学学报(信息科学版), 2019, 37(3): 253-259. |
| HUANG J F, MA Y. Adaptive formation control for vehicles based on leader-follower strategy[J]. Journal of Jilin University (Information Science Edition), 2019, 37(3): 253-259. | |
| 11 | TUNCER Ö, GÜVENC L, COSKUN F, et al. Vision based lane keeping assistance control triggered by a driver inattention monitor[C].2010 IEEE International Conference on Systems, Man and Cybernetics. IEEE, 2010: 289-297. |
| 12 | RAJAMANI R, TAN H S, LAW B K, et al. Demonstration of integrated longitudinal and lateral control for the operation of automated vehicles in platoons[J]. IEEE Transactions on Control Systems Technology, 2000, 8(4): 695-708. |
| 13 | BIAN Y, ZHENG Y, REN W, et al. Reducing time headway for platooning of connected vehicles via V2V communication[J]. Transportation Research Part C: Emerging Technologies, 2019, 102: 87-105. |
| 14 | VAN DEN BERG D, VAN DER PLOEG C, ALIREZAEI M, et al. Lateral vehicle following in a cooperative vehicle platooning application: an H∞ approach[C].2021 European Control Conference (ECC). IEEE, 2021: 1802-1807. |
| 15 | LIU M, CHOUR K, RATHINAM S, et al. Lateral control of an autonomous and connected following vehicle with limited preview information[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(3): 406-418. |
| 16 | 高秀晶, 马育林, 杉町敏之, 等. 基于车车通讯的队列自动跟驰横向耦合模型[J]. 汽车工程, 2021, 43(12): 1745-1751. |
| GAO X J, MA Y L, SUGIMACHI T, et al. Lateral coupling model of automatic platooning based on vehicle to vehicle communication[J]. Automotive Engineering, 2021, 43(12): 1745-1751. | |
| 17 | FASSBENDER D, HEINRICH B C, LUETTEL T, et al. An optimization approach to trajectory generation for autonomous vehicle following[C].2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017: 3675-3680. |
| 18 | WEI S, ZOU Y, ZHANG X, et al. An integrated longitudinal and lateral vehicle following control system with radar and vehicle-to-vehicle communication[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1116-1127. |
| 19 | LIU Y, ZONG C, ZHANG D. Lateral control system for vehicle platoon considering vehicle dynamic characteristics[J]. IET Intelligent Transport Systems, 2019, 13(9): 1356-1364. |
| 20 | CHEN W, ZHAO C, DAI G, et al. A partially flexible virtual trailer link model for vehicle-following systems[J]. Transactions of the Institute of Measurement and Control, 2015, 37(2): 273-281. |
| 21 | BAYUWINDRA A, AAKRE Ø L, PLOEG J, et al. Combined lateral and longitudinal CACC for a unicycle-type platoon[C].2016 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2016: 527-532. |
| 22 | BAYUWINDRA A, LEFEBER E, PLOEG J, et al. Extended look-ahead tracking controller with orientation-error observer for vehicle platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(11): 4808-4821. |
| 23 | JAKUBIAK J, LEFEBER E, TCHOŃ K, et al. Two observer-based tracking algorithms for a unicycle mobile robot[J]. International Journal of Applied Mathematics and Computer Science, 2002, 12(4): 513-522. |
| 24 | BAYUWINDRA A, PLOEG J, LEFEBER E, et al. Combined longitudinal and lateral control of car-like vehicle platooning with extended look-ahead[J]. IEEE Transactions on Control Systems Technology, 2019, 28(3): 790-803. |
| [1] | 胡林,谷子逸,王丹琦,王方,邹铁方,黄晶. 汽车安全性测评规程现状及趋势展望[J]. 汽车工程, 2024, 46(2): 187-200. |
| [2] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [3] | 王庞伟,刘程,汪云峰,张名芳. 面向城市道路的智能网联汽车多车道轨迹优化方法[J]. 汽车工程, 2024, 46(2): 241-252. |
| [4] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [5] | 李升波,占国建,蒋宇轩,兰志前,张宇航,邹文俊,陈晨,成波,李克强. 类脑学习型自动驾驶决控系统的关键技术[J]. 汽车工程, 2023, 45(9): 1499-1515. |
| [6] | 刘济铮,王震坡,孙逢春,张雷. 异构智能网联汽车编队延迟补偿控制研究[J]. 汽车工程, 2023, 45(9): 1573-1582. |
| [7] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [8] | 朱冰,姜泓屹,赵健,韩嘉懿,刘彦辰. 智能网联汽车协同感知信任度动态计算与评价方法[J]. 汽车工程, 2023, 45(8): 1383-1391. |
| [9] | 关宇昕,冀浩杰,崔哲,李贺,陈丽文. 智能网联汽车车载CAN网络入侵检测方法综述[J]. 汽车工程, 2023, 45(6): 922-935. |
| [10] | 胡耘浩,李克强,向云丰,石佳,罗禹贡. 智能网联汽车通用跨平台实时仿真系统架构及应用[J]. 汽车工程, 2023, 45(3): 372-381. |
| [11] | 李子先,潘世举,徐友春. 8轮分布式电驱动车辆AFS和DYC协同控制[J]. 汽车工程, 2023, 45(3): 409-420. |
| [12] | 张新荣,谭宇航,贾一帆,黄晋,许权宁. 四轮独立驱动电动汽车路径跟踪鲁棒控制[J]. 汽车工程, 2023, 45(2): 253-262. |
| [13] | 刘浩天,魏洪乾,时培成,张幽彤. 基于帧间隔-总线电压混合特征的汽车ECU伪装攻击识别[J]. 汽车工程, 2023, 45(11): 2070-2081. |
| [14] | 李捷,吴晓东,许敏,刘永刚. 基于强化学习的城市场景多目标生态驾驶策略[J]. 汽车工程, 2023, 45(10): 1791-1802. |
| [15] | 钱立军,陈晨,陈健,陈欣宇,熊驰. 基于Q学习模型的无信号交叉口离散车队控制[J]. 汽车工程, 2022, 44(9): 1350-1358. |
|