汽车工程 ›› 2023, Vol. 45 ›› Issue (9): 1583-1607.doi: 10.19562/j.chinasae.qcgc.2023.09.008
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
吴思宇1,于文浩1,邢星宇2,张玉新3,李楚照1,4,李雪轲5,古昕昱5,李云巍1,马小涵6,路伟7,王政7,郝圳茂8,王红1( ),李骏1
),李骏1
收稿日期:2023-07-08
修回日期:2023-08-12
出版日期:2023-09-25
发布日期:2023-09-23
通讯作者:
王红
E-mail:hong_wang@tsinghua.edu.cn
基金资助:
Siyu Wu1,Wenhao Yu1,Xingyu Xing2,Yuxin Zhang3,Chuzhao Li1,4,Xueke Li5,Xinyu Gu5,Yunwei Li1,Xiaohan Ma6,Wei Lu7,Zheng Wang7,Zhenmao Hao8,Hong Wang1(),Jun Li1
Received:2023-07-08
Revised:2023-08-12
Online:2023-09-25
Published:2023-09-23
Contact:
Hong Wang
E-mail:hong_wang@tsinghua.edu.cn
摘要:
预期功能安全作为道路运行安全的重要组成,是智能网联汽车的核心挑战。全面高效的预期功能安全测试验证方法能够有效支撑系统安全开发流程。本文提出一种以关键场景为载体、由封闭验证和开放论证双闭环构建的测试验证框架,并综合论述关键场景构建技术,进一步建立接受准则的量化方法。最后,本文展望在预期功能安全测试验证领域亟待推进的关键研究。本文旨在为智能网联汽车预期功能安全测试验证的工程实践提供兼具可操作性和理论充分性的参考依据。
吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607.
Siyu Wu,Wenhao Yu,Xingyu Xing,Yuxin Zhang,Chuzhao Li,Xueke Li,Xinyu Gu,Yunwei Li,Xiaohan Ma,Wei Lu,Zheng Wang,Zhenmao Hao,Hong Wang,Jun Li. Methodology of Critical Scenarios-Based Dual-Loop Testing and Verification for Safety of the Intended Functionality[J]. Automotive Engineering, 2023, 45(9): 1583-1607.

图 1
智能网联汽车伤害触发路径"
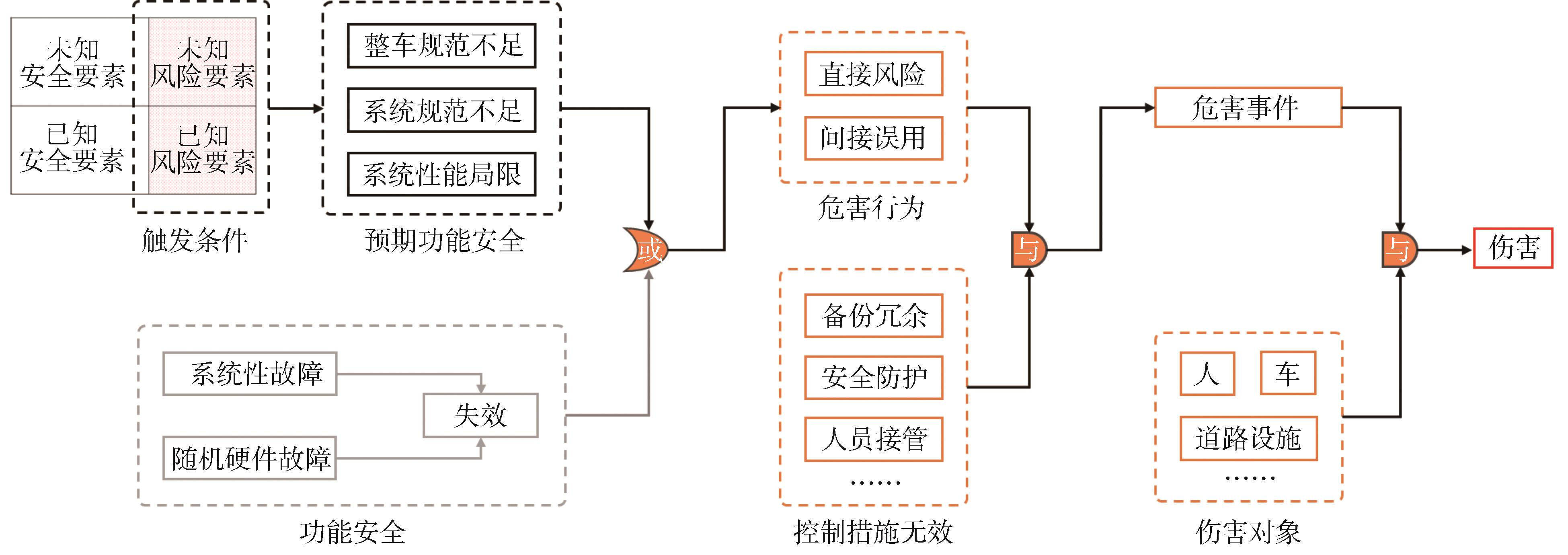

图 2
基于关键场景的双闭环测试框架"


图 3
预期功能安全场景架构"
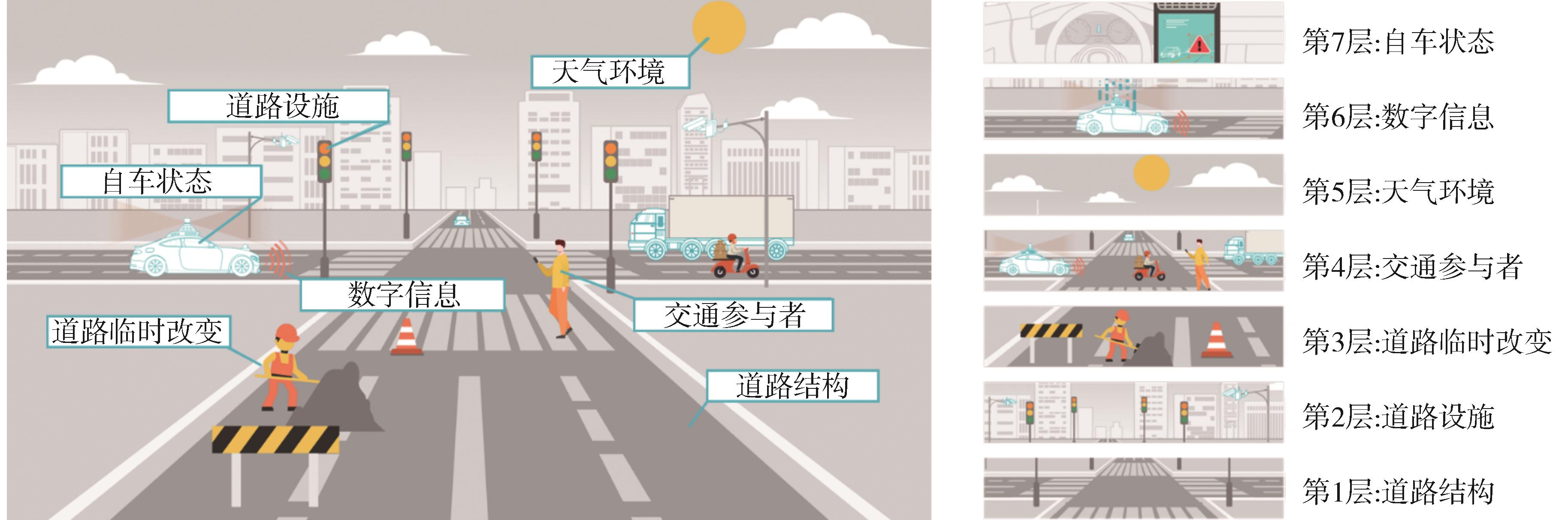
图 4
归纳方法分析路径"
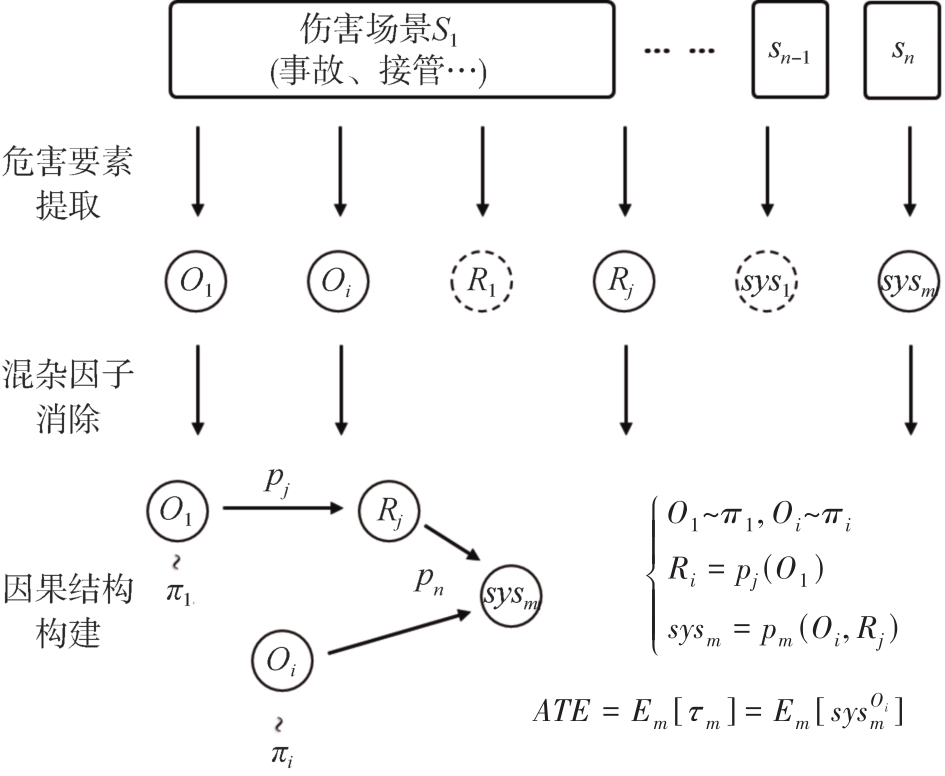
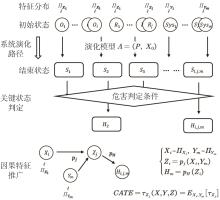
图 5
演绎方法分析路径"
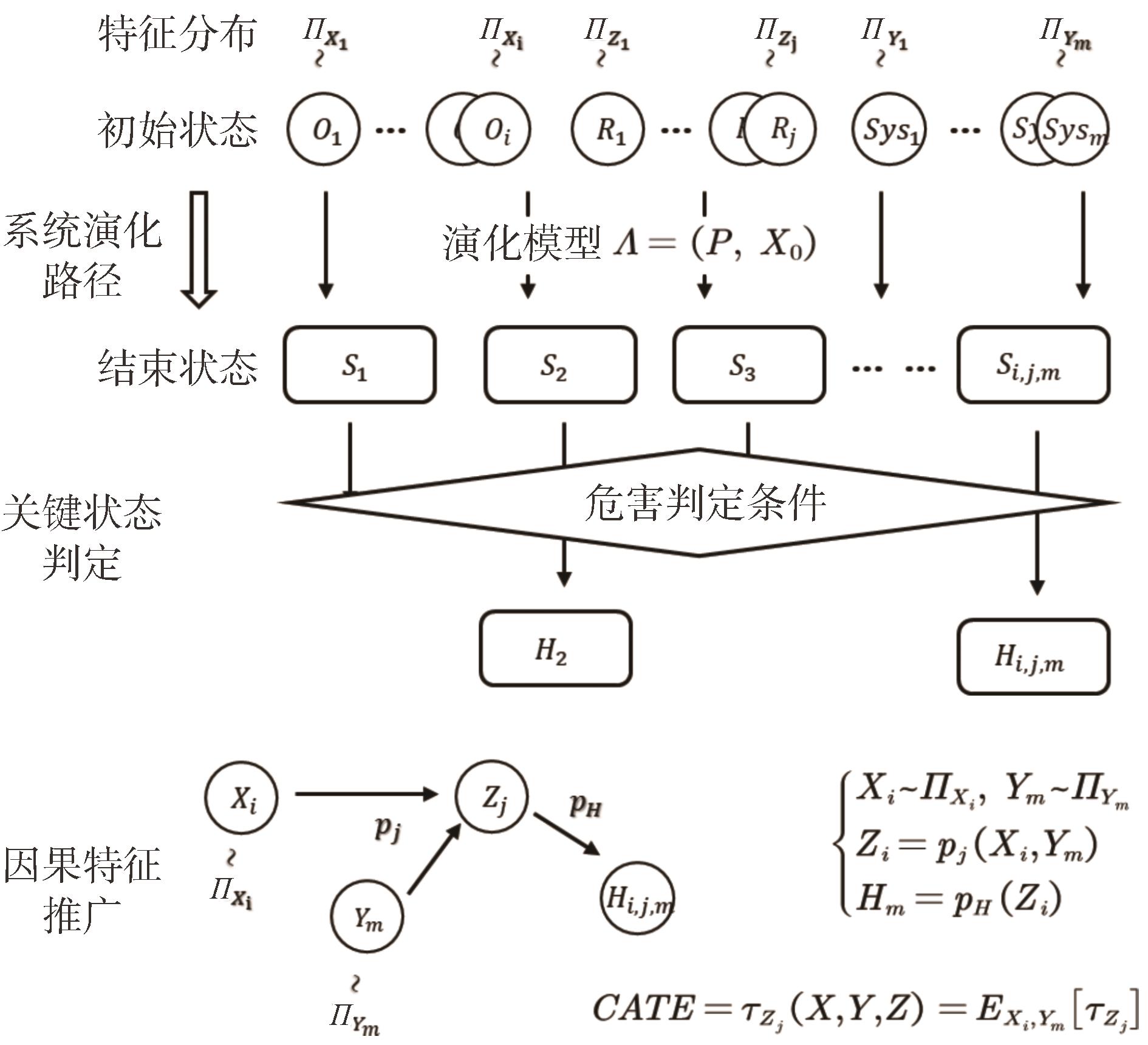
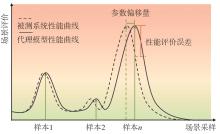
图 6
开环场景构建样本偏差"
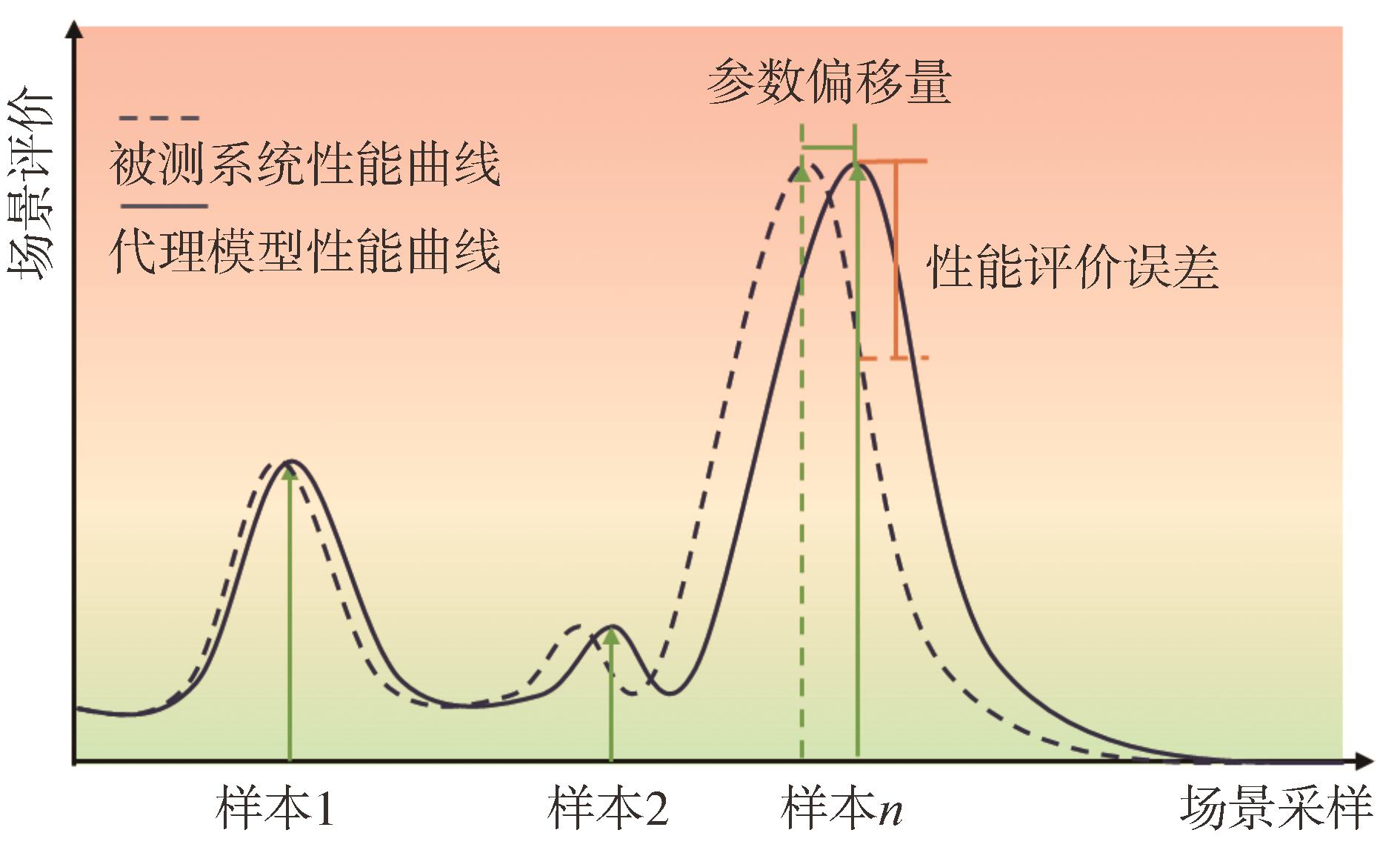
图 7
基于场景的测试验证平台框架"

图 8
测试技术优缺点总结"

| 1 | 邵文博,李骏,张玉新,等.智能汽车预期功能安全保障关键技术[J].汽车工程, 2022, 44(9): 1289-1304. |
| SHAO W, JUN L, ZHANG Y, et al.Key technologies to ensure the safety of the intended functionality for intelligent vehicles[J]. Automotive Engineering, 2022,44(9): 1289-1304. | |
| 2 | ISO. ISO/TR 4804: Road vehicles - safety and cybersecurity for automated driving systems - design, verification and validation[S]. 2020. |
| 3 | ISO. ISO 34501: Road vehicles - terms and definitions of test scenarios for automated driving systems [S]. 2018. |
| 4 | ISO. ISO 34502: Road vehicles - engineering framework and process of scenario-based safety evaluation [S]. 2018. |
| 5 | ISO. ISO 34503: Road vehicles - taxonomy for operational design domain for automated driving systems [S]. 2018. |
| 6 | ISO. ISO 34504: Road vehicles - scenario attributes and categorization [S]. 2018. |
| 7 | ISO. ISO 34505: Road vehicles - evaluation of test scenarios for automated driving systems [S]. 2018. |
| 8 | United Nations Economic Commission for Europe Geneva CH Regulation Addendum. UN Regulation No 155-Uniform provisions concerning the approval of vehicles with regards to cyber security and cyber security management system[S]. 2021. |
| 9 | United Nations Economic Commission for Europe Geneva CH Regulation Addendum. UN Regulation No. 156 – Uniform provisions concerning the approval of vehicles with regards to software update and software updates management system[S]. 2020. |
| 10 | United Nations Economic Commission for Europe Geneva CH Regulation Addendum. UN Regulation No 157 – Uniform provisions concerning the approval of vehicles with regards to Automated Lane Keeping Systems [S]. 2021. |
| 11 | UL. UL 4600 safety for the evaluation of autonomous products [S]. 2020. |
| 12 | HARRIS M. The radical scope of tesla’s data hoard: every tesla is providing reams of sensitive data about its driver’s life[J]. IEEE Spectrum, 2022,59(10): 40-45. |
| 13 | ABDULKHALEQ A,LAMMERING D,AGNER S,et al. A systematic approach based on STPA for developing a dependable architecture for fully automated driving vehicles [J]. Procedia Engineering, 2017, 179 (Supplement C): 41-51. |
| 14 | SCHOLTES M, WESTHOFEN L, TURNER L R, et al. 6-Layer model for a structured description and categorization of urban traffic and environment[J/OL]. IEEE Access, 2021, 9: 59131-59147. |
| 15 | NEUROHR C, WESTHOFEN L, BUTZ M, et al. Criticality analysis for the verification and validation of automated vehicles[J]. IEEE Access, 2021, 9: 18016-18041. |
| 16 | ELSTER L, LINNHOFF C, ROSENBERGER P, et al. Fundamental design criteria for logical scenarios in simulation-based safety validation of automated driving using sensor model knowledge[C]. 2021 IEEE Intelligent Vehicles Symposium Workshops (IV Workshops). IEEE, 2021: 209-214. |
| 17 | NEUROHR C, WESTHOFEN L, HENNING T, et al. Fundamental considerations around scenario-based testing for automated driving[C]. 2020 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2020: 121-127. |
| 18 | BECKER C, BREWER J C, YOUNT L. Safety of the intended functionality of lane-centering and lane-changing maneuvers of a generic level 3 highway chauffeur system[R]. National Highway Traffic Safety Administration, 2020. |
| 19 | WILLEMSEN D, SCHMEITZ A, FUSCO M. Enabling safe multibrand platooning for Europe[R]. European Commission, 2018. |
| 20 | JACOBO A, NOBUYUKI U, KUNIO Y, et al. Development of a safety assurance process for autonomous vehicles in Japan[C]. Proceedings of ESV Conference, 2019. |
| 21 | ZHANG C, LIU Y, ZHANG Q, et al. A graded offline evaluation framework for intelligent vehicle’s cognitive ability[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 320-325. |
| 22 | HUANG Z, ARIEF M, LAM H, et al. Synthesis of different autonomous vehicles test approaches[C/OL]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI: IEEE, 2018: 2000-2005. |
| 23 | XU C, DING W, LYU W, et al. SafeBench: a benchmarking platform for safety evaluation of autonomous vehicles: arXiv:2206.09682[R/OL]. arXiv, 2022. |
| 24 | 余卓平,邢星宇,陈君毅.自动驾驶汽车测试技术与应用进展[J]. 同济大学学报(自然科学版), 2019, 47(4): 540-547. |
| YU Z, XING X, CHEN J. Review on automated vehicle testing technology and its application[J]. Journal of Tongji University(Natural Science), 2019, 47(4): 540-547. | |
| 25 | MA Y, SUN C, CHEN J, et al. Verification and validation methods for decision-making and planning of automated vehicles: a review[J/OL]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 480-498. |
| 26 | BATSCH F, KANARACHOS S, CHEAH M, et al. A taxonomy of validation strategies to ensure the safe operation of highly automated vehicles[J]. Journal of Intelligent Transportation Systems, 2021, 26(1): 14-33. |
| 27 | ISO. ISO 26262: Road vehicles - functional safety[S]. 2018. |
| 28 | XING X, JIA T, CHEN J, et al. An ontology-based method to identify triggering conditions for perception insufficiency of autonomous vehicles[J]. arXiv preprint arXiv:, 2022. |
| 29 | HUANG AN, XING XINGYU, ZHOU TANGRUI, et al. A safety analysis and verification framework for autonomous vehicles based on the identification of triggering events[C]. 2020 International Automotive Security, Safety and Testing Congress. 2021. |
| 30 | HU Y, YANG J, CHEN L, et al. Planning-oriented autonomous driving[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023: 17853-17862. |
| 31 | CODEVILLA F, MULLER M, LOPEZ A, et al. End-to-end driving via conditional imitation learning[C/OL]. 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, QLD: IEEE, 2018: 4693-4700. |
| 32 | ISO. ISO 21448: Road vehicles - safety of the intended functionality[S]. 2022. |
| 33 | LIU H X, FENG S. “ Curse of rarity” for autonomous vehicles[J]. arXiv preprint arXiv:, 2022. |
| 34 | KALRA N, PADDOCK S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability?[J]. Transportation Research Part A: Policy and Practice, 2016, 94: 182-193. |
| 35 | DE GELDER E, PAARDEKOOPER J P, SABERI A K, et al. Ontology for scenarios for the assessment of automated vehicles. arXiv 2020 [J]. arXiv preprint arXiv:. |
| 36 | GO K, CARROL J M. The blind men and the elephant: views of scenario-based system design[J]. Interactions, 2004,11(6):44-53. |
| 37 | GEYER S, BALTZER M, FRANZ B, et al. Concept and development of a unified ontology for generating test and use‐case catalogues for assisted and automated vehicle guidance[J/OL]. IET Intelligent Transport Systems, 2014, 8(3): 183-189. |
| 38 | ELROFAI H, DANIEL W, CAMP O O D. Scenario identification for validation of automated driving functions [C]. International Forum on Advanced Microsystems for Automotive Applications 2016. |
| 39 | SAIGOL Z, PETERS A, BARTON M, et al. Regulating and accelerating development of highly automated and autonomous vehicles through simulation and modelling[J]. Catapult Transp. Syst, 2018. |
| 40 | ANDREOTTI E, BOYRAZ P, SELPI S. Mathematical definitions of scene and scenario for analysis of automated driving systems in mixed-traffic simulations[J/OL]. IEEE Transactions on Intelligent Vehicles, 2021, 6(2): 366-375. |
| 41 | BAGSCHIK G, MENZEL T, MAURER M. Ontology based scene creation for the development of automated vehicles[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1813-1820. |
| 42 | DE GELDER E, ELROFAI H, SABERI A K, et al. Risk quantification for automated driving systems in real-world driving scenarios[J/OL]. IEEE Access, 2021, 9: 168953-168970. |
| 43 | ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving[C/OL]. 2015 IEEE 18th International Conference on Intelligent Transportation Systems. Gran Canaria, Spain: IEEE, 2015: 982-988. |
| 44 | GROH K, KÜHBECK T, et al. Towards a scenario-based assessment method for highly automated driving functions[C]. 8. Tagung Fahrerassistenz. 2017. |
| 45 | MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1821-1827. |
| 46 | GUO R, CHENG L, LI J, et al. A survey of learning causality with data: problems and methods[J/OL]. ACM Computing Surveys, 2021, 53(4): 1-37. |
| 47 | PEARL J. Models, reasoning and inference[M]. Cambridge, UK: Cambridge University Press, 2000. |
| 48 | SPIRTES P, GLYMOUR C N, SCHEINES R. Causation, prediction, and search[M]. MIT Press, 2000. |
| 49 | CHICKERING D M. Optimal structure identification with greedy search[J]. Journal of Machine Learning Research, 2002, 3: 507-554. |
| 50 | RAMSEY J, GLYMOUR M, SANCHEZ-ROMERO R, et al. A million variables and more: the fast greedy equivalence search algorithm for learning high-dimensional graphical causal models, with an application to functional magnetic resonance images[J/OL]. International Journal of Data Science and Analytics, 2017, 3(2): 121-129. |
| 51 | SHIMIZU S, HOYER P O, HYVÄRINEN A, et al. A linear non-Gaussian acyclic model for causal discovery[J]. Journal of Machine Learning Research, 2006, 7(10). |
| 52 | SHIMIZU S, BOLLEN K. Bayesian estimation of causal direction in acyclic structural equation models with individual-specific confounder variables and non-Gaussian distributions[J]. J. Mach. Learn. Res., 2014, 15(1): 2629-2652. |
| 53 | HOYER P, JANZING D, MOOIJ J M, et al. Nonlinear causal discovery with additive noise models[J]. Advances in Neural Information Processing Systems, 2008, 21. |
| 54 | ZHU S, NG I, CHEN Z. Causal discovery with reinforcement learning[M/OL]. arXiv, 2020. |
| 55 | LIN W, LAN H, LI B. Generative causal explanations for graph neural networks[C]. International Conference on Machine Learning. PMLR, 2021: 6666-6679. |
| 56 | HARTFORD J, LEWIS G, LEYTON-BROWN K, et al. Deep IV: a flexible approach for counterfactual prediction[C]. International Conference on Machine Learning. PMLR, 2017: 1414-1423. |
| 57 | KALAINATHAN D, GOUDET O, GUYON I, et al. Structural agnostic modeling: adversarial learning of causal graphs[J]. The Journal of Machine Learning Research, 2022, 23(1): 9831-9892. |
| 58 | ANGRIST J D, IMBENS G W. Two-stage least squares estimation of average causal effects in models with variable treatment intensity[J]. Journal of the American statistical Association, 1995, 90(430): 431-442. |
| 59 | TRIGINER J C, MARTIN H, WINKLER B, et al. Integration of safety and cybersecurity analysis through combination of systems and reliability theory methods[J]. Embedded Real-Time Systems, 2020. |
| 60 | SHARMA S, FLORES A, HOBBS C, et al. Safety and security analysis of AEB for L4 autonomous vehicle using STPA[C]. ASD,2019. |
| 61 | ROSENBAUM P R, RUBIN D B. The central role of the propensity score in observational studies for causal effects[J]. Biometrika,1983,70(1): 41-55. |
| 62 | VAN DER LAAN M J, RUBIN D. Targeted maximum likelihood learning[J/OL]. The International Journal of Biostatistics, 2006, 2(1). |
| 63 | HIRANO K, IMBENS G W, RIDDER G. Efficient estimation of average treatment effects using the estimated propensity score[J/OL]. Econometrica, 2003, 71(4): 1161-1189. |
| 64 | KUHN D R, WALLACE D R, GALLO A M. Software fault interactions and implications for software testing[J/OL]. IEEE Transactions on Software Engineering, 2004, 30(6): 418-421. |
| 65 | AMERSBACH C, WINNER H. Functional decomposition—a contribution to overcome the parameter space explosion during validation of highly automated driving[J/OL]. Traffic Injury Prevention, 2019, 20(sup1): S52-S57. |
| 66 | ALNASER A J, SARGOLZAEI A, AKBAS M I. Autonomous vehicles scenario testing framework and model of computation: on generation and coverage[J/OL]. IEEE Access, 2021, 9: 60617-60628. |
| 67 | MACHIDA T, SHITAOKA K. Test coverage index for ADAS/ADS assessment based on various real-world information points[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1443-1455. |
| 68 | GRINDAL M, OFFUTT J, ANDLER S F. Combination testing strategies: a survey[J/OL]. Software Testing, Verification and Reliability, 2005, 15(3): 167-199. |
| 69 | AMERSBACH C, HERMANN W. Functional decomposition: an approach to reduce the approval effort for highly automated driving[C]. Tagung Fahrerassistenz. 2017. |
| 70 | SCHALLAU T, NAUJOKAT S, KULLMANN F, et al. Tree-based scenario classification: a formal framework for coverage analysis on test drives of autonomous vehicles[M/OL]. arXiv, 2023. |
| 71 | LAURENT T, KLIKOVITS S, ARCAINI P, et al. Parameter coverage for testing of autonomous driving systems under uncertainty[J/OL]. ACM Transactions on Software Engineering and Methodology, 2023, 32(3): 1-31. |
| 72 | LAURENT T, ARCAINI P, ISHIKAWA F, et al. A mutation-based approach for assessing weight coverage of a path planner[C/OL]. 2019 26th Asia-Pacific Software Engineering Conference (APSEC). Putrajaya, Malaysia: IEEE, 2019: 94-101. |
| 73 | WANG W, RAMESH A, ZHU J, et al. Clustering of driving encounter scenarios using connected vehicle trajectories[J/OL]. IEEE Transactions on Intelligent Vehicles, 2020, 5(3): 485-496. |
| 74 | LANGNER J, BACH J, RIES L, et al. Estimating the uniqueness of test scenarios derived from recorded real-world-driving-data using autoencoders[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1860-1866. |
| 75 | HAUER F, SCHMIDT T, HOLZMULLER B, et al. Did we test all scenarios for automated and autonomous driving systems?[C/OL]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 2950-2955. |
| 76 | STARK L, DÜRING M, SCHOENAWA S, et al. Quantifying vision zero: crash avoidance in rural and motorway accident scenarios by combination of ACC, AEB, and LKS projected to German accident occurrence[J/OL]. Traffic Injury Prevention, 2019, 20(sup1): S126-S132. |
| 77 | HUNGAR H. A concept of scenario space exploration with criticality coverage guarantees: extended abstract[M/OL]//MARGARIA T, STEFFEN B. Leveraging Applications of Formal Methods, Verification and Validation: Applications: 12478. Cham: Springer International Publishing, 2020: 293-306. |
| 78 | WAGNER S, GROH K, KUHBECK T, et al. Using time-to-react based on naturalistic traffic object behavior for scenario-based risk assessment of automated driving[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1521-1528. |
| 79 | LEFEVRE S, LAUGIER C, IBANEZ-GUZMAN J. Evaluating risk at road intersections by detecting conflicting intentions[C/OL]. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, 2012: 4841-4846. |
| 80 | STRICKLAND M, FAINEKOS G, AMOR H B. Deep predictive models for collision risk assessment in autonomous driving[C/OL]. 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, QLD: IEEE, 2018: 4685-4692. |
| 81 | MALIN F, NORROS I, INNAMAA S. Accident risk of road and weather conditions on different road types[J]. Accident Analysis & Prevention, 2019, 122: 181-188. |
| 82 | ALTHOFF M, LUTZ S. Automatic Generation of safety-critical test scenarios for collision avoidance of road vehicles[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1326-1333. |
| 83 | WANG J, ZHANG C, LIU Y, et al. Traffic sensory data classification by quantifying scenario complexity[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 1543-1548. |
| 84 | MA Y, PAN X, XIONG L, et al. Definition and quantification of the complexity experienced by autonomous vehicles in the environment and driving task[M]. CICTP 2020. 2020: 1030-1042. |
| 85 | 李江坤,邓伟文,任秉韬,等. 一种智能汽车测试场景复杂度的评估方法[C]. 中国汽车工程学会. 2020中国汽车工程学会年会论文集. 机械工业出版社, 2020:110-117. |
| LI J, DENG W, REN B, et al. An evaluation method of test scenario complexity for intelligent vehicles[C]. China Society of Automotive Engineers. SAECCE2020. China Machine Press, 2020:110-117. | |
| 86 | XIA Q, DUAN J, GAO F, et al. Automatic generation method of test scenario for ADAS based on complexity[C/OL]. Intelligent and Connected Vehicles Symposium. 2017: 2017-01-1992. |
| 87 | STARK L, OBST S, SCHOENAWA S, et al. Towards vision zero: addressing white spots by accident data based ADAS design and evaluation[C/OL]. 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES). Cairo, Egypt: IEEE, 2019: 1-6. |
| 88 | ZHANG C, ZHU J, WANG W, et al. A general framework of learning multi-vehicle interaction patterns from video[C/OL].2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 4323-4328. |
| 89 | OELJEKLAUS M, HOFFMANN F, BERTRAM T. A combined recognition and segmentation model for urban traffic scene understanding[C/OL]. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama: IEEE, 2017: 1-6. |
| 90 | KRAJEWSKI R, MOERS T, NERGER D, et al. Data-driven maneuver modeling using generative adversarial networks and variational autoencoders for safety validation of highly automated vehicles[C/OL]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI: IEEE, 2018: 2383-2390. |
| 91 | BOLTE J A, BÄR A, LIPINSKI D, et al. Towards corner case detection for autonomous driving[M/OL]. arXiv, 2019. |
| 92 | SIAMI M, NADERPOUR M, LU J. A mobile telematics pattern recognition framework for driving behavior extraction[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1459-1472. |
| 93 | RIES L, LANGNER J, OTTEN S, et al. A driving scenario representation for scalable real-data analytics with neural networks[C/OL]. 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 2215-2222. |
| 94 | MAVROGIANNIS C, DECASTRO J, SRINIVASA S S. Analyzing multiagent interactions in traffic scenes via topological braids[M/OL]. arXiv, 2022. |
| 95 | ERDOGAN A, UGRANLI B, ADALI E, et al. Real- world maneuver extraction for autonomous vehicle validation: a comparative study[C/OL]. 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 267-272. |
| 96 | GRUNER R, HENZLER P, HINZ G, et al. Spatiotemporal representation of driving scenarios and classification using neural networks[C/OL]. 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 1782-1788. |
| 97 | WANG W, ZHAO D. Extracting traffic primitives directly from naturalistically logged data for self-driving applications[J/OL]. IEEE Robotics and Automation Letters, 2018, 3(2): 1223-1229. |
| 98 | MARTINSSON J, MOHAMMADIHA N, SCHLIEP A. Clustering vehicle maneuver trajectories using mixtures of hidden markov models[C/OL]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI: IEEE, 2018: 3698-3705. |
| 99 | BEGLEROVIC H, SCHLOEMICHER T, METZNER S, et al. Deep learning applied to scenario classification for lane-keep-assist systems[J/OL]. Applied Sciences, 2018, 8(12): 2590. |
| 100 | KRUBER F, WURST J, BOTSCH M. An unsupervised random forest clustering technique for automatic traffic scenario categorization[C/OL]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI: IEEE, 2018: 2811-2818. |
| 101 | KRUBER F, WURST J, MORALES E S, et al. Unsupervised and supervised learning with the random forest algorithm for traffic scenario clustering and classification[C/OL]. 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 2463-2470. |
| 102 | WATANABE, HIROKI, et al. Methodology of scenario clustering for predictive safety functions[C].9. Tagung Automatisiertes Fahren. 2019. |
| 103 | LANGNER J, GROLIG H, OTTEN S, et al. Logical scenario derivation by clustering dynamic-length-segments extracted from real-world-driving-data:[C/OL]. Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems. Heraklion, Crete, Greece: SCITEPRESS - Science and Technology Publications, 2019: 458-467. |
| 104 | PROVINE R, SCHLENOFF C, BALAKIRSKY S, et al. Ontology-based methods for enhancing autonomous vehicle path planning[J/OL]. Robotics and Autonomous Systems, 2004, 49(1-2): 123-133. |
| 105 | MOHAMMAD M A, KALOSKAMPIS I, HICKS Y, et al. Ontology-based framework for risk assessment in road scenes using videos[J/OL]. Procedia Computer Science, 2015, 60: 1532-1541. |
| 106 | MAURER M. EMS-vision: knowledge representation for flexible automation of land vehicles[C/OL]. Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No.00TH8511). Dearborn, MI, USA: IEEE, 2000: 575-580. |
| 107 | HINA M D, THIERRY C, SOUKANE A, et al. Cognition of driving context for driving assistance[J]. International Journal of Computer and Information Engineering, 2018, 12(2). |
| 108 | BREHAR R, FORTUNA C, BOTA S, et al. Spatio-temporal reasoning for traffic scene understanding[C/OL]. 2011 IEEE 7th International Conference on Intelligent Computer Communication and Processing. Cluj-Napoca, Romania: IEEE, 2011: 377-384. |
| 109 | ARMAND A, FILLIAT D, IBANEZ-GUZMAN J. Ontology-based context awareness for driving assistance systems[C/OL]. 2014 IEEE Intelligent Vehicles Symposium Proceedings. MI, USA: IEEE, 2014: 227-233. |
| 110 | HUANG L, LIANG H, YU B, et al. Ontology-based driving scene modeling, situation assessment and decision making for autonomous vehicles[C/OL]. 2019 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS). Nagoya, Japan: IEEE, 2019: 57-62. |
| 111 | HU Y, ZHAN W, TOMIZUKA M. Scenario-transferable semantic graph reasoning for interaction-aware probabilistic prediction[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 23212-23230. |
| 112 | KLUECK F, LI Y, NICA M, et al. Using ontologies for test suites generation for automated and autonomous driving functions[C/OL]. 2018 IEEE International Symposium on Software Reliability Engineering Workshops (ISSREW). Memphis, TN: IEEE, 2018: 118-123. |
| 113 | HULSEN M, ZOLLNER J M, WEISS C. Traffic intersection situation description ontology for advanced driver assistance[C/OL]. 2011 IEEE Intelligent Vehicles Symposium (IV). Baden-Baden, Germany: IEEE, 2011: 993-999. |
| 114 | ULBRICH S, NOTHDURFT T, MAURER M, et al. Graph-based context representation, environment modeling and information aggregation for automated driving[C/OL]. 2014 IEEE Intelligent Vehicles Symposium Proceedings. MI, USA: IEEE, 2014: 541-547. |
| 115 | KOHLHAAS R, BITTNER T, SCHAMM T, et al. Semantic state space for high-level maneuver planning in structured traffic scenes[C/OL]. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao, China: IEEE, 2014: 1060-1065. |
| 116 | ZIPFL M, ZÖLLNER J M. Towards traffic scene description: the semantic scene graph[M/OL]. arXiv, 2022. |
| 117 | BUECHEL M, HINZ G, RUEHL F, et al. Ontology-based traffic scene modeling, traffic regulations dependent situational awareness and decision-making for automated vehicles[C/OL]. 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 1471-1476. |
| 118 | DE GELDER E, PAARDEKOOPER J P, SABERI A K, et al. Towards an ontology for scenario definition for the assessment of automated vehicles: an object-oriented framework[J/OL]. IEEE Transactions on Intelligent Vehicles, 2022, 7(2): 300-314. |
| 119 | QUEIROZ R, BERGER T, CZARNECKI K. GeoScenario: an open DSL for autonomous driving scenario representation[C/OL]. 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 287-294. |
| 120 | URBIETA I, NIETO M, GARCÍA M, et al. Design and implementation of an ontology for semantic labeling and testing: automotive global ontology (AGO)[J/OL]. Applied Sciences, 2021, 11(17): 7782. |
| 121 | AKAGI Y. Ontology based collection and analysis of traffic event data for developing intelligent vehicles[C/OL]. 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE). Nagoya: IEEE, 2017: 1-5. |
| 122 | REICHENBÄCHER C, RASCH M, KAYATAS Z, et al. Identifying scenarios in field data to enable validation of highly automated driving systems[C/OL]. Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems. 2022: 134-142. |
| 123 | ELGHARBAWY M, SCHWARZHAUPT A, FREY M, et al. Ontology-based adaptive testing for automated driving functions using data mining techniques[J/OL]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 66: 234-251. |
| 124 | CHANG C, CAO D, CHEN L, et al. MetaScenario: a framework for driving scenario data description, storage and indexing[J/OL]. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1156-1175. |
| 125 | 朱波,胡旭东,谈东奎,等.基于多通道态势图的自动驾驶场景表征方法[J].中国公路学报, 2020,33(8): 204-214. |
| ZHU B, HU X, TAN D, et al. Automatic driving scenario representation based on multi-channel situation map[J]. China Journal of Highway and Transport, 2020,33(8): 204-214. | |
| 126 | BOGDOLL D, GUNESHKA S, ZÖLLNER J M. One ontology to rule them all: corner case scenarios for autonomous driving[M/OL]. arXiv:2209, 00342, 2023: 409-425. |
| 127 | SO J J, PARK I, WEE J, et al. Generating traffic safety test scenarios for automated vehicles using a big data technique[J/OL]. KSCE Journal of Civil Engineering, 2019, 23(6): 2702-2712. |
| 128 | KUHN D R, KACKER R N, LEI Y. Practical combinatorial testing: NIST SP 800-142[R/OL]. Gaithersburg, MD: National Institute of Standards and Technology, 2010: NIST SP 800-142. |
| 129 | DUAN J, GAO F, HE Y. Test scenario generation and optimization technology for intelligent driving systems[J/OL]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(1): 115-127. |
| 130 | GAO F, DUAN J, HAN Z, et al. Automatic virtual test technology for intelligent driving systems considering both coverage and efficiency[J/OL]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14365-14376. |
| 131 | FUJIKURA T, KURACHI R. A test scenario generation method for high requirement coverage by using KAOS method[C/OL]. 2019 IEEE 19th International Conference on Software Quality, Reliability and Security Companion (QRS-C). Sofia, Bulgaria: IEEE, 2019: 542-543. |
| 132 | PANZICA LA MANNA V, SEGALL I, GREENYER J. Synthesizing tests for combinatorial coverage of modal scenario specifications[C/OL]. 2015 ACM/IEEE 18th International Conference on Model Driven Engineering Languages and Systems (MODELS). Ottawa, ON, Canada: IEEE, 2015: 126-135. |
| 133 | GLADISCH C, HEINZEMANN C, HERRMANN M, et al. Leveraging combinatorial testing for safety-critical computer vision datasets[C/OL]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Seattle, WA, USA: IEEE, 2020: 1314-1321. https://ieeexplore.ieee.org/document/9150861/. |
| 134 | TUNCALI C E, PAVLIC T P, FAINEKOS G. Utilizing S-TaLiRo as an automatic test generation framework for autonomous vehicles[C/OL]. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). Rio de Janeiro, Brazil: IEEE, 2016: 1470-1475. |
| 135 | TUNCALI C E, YAGHOUBI S, PAVLIC T P, et al. Functional gradient descent optimization for automatic test case generation for vehicle controllers[C/OL]. 2017 13th IEEE Conference on Automation Science and Engineering (CASE). Xi’an: IEEE, 2017: 1059-1064. |
| 136 | KLISCHAT M, LIU E I, HOLTKE F, et al. Scenario factory: creating safety-critical traffic scenarios for automated vehicles[C/OL]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-7. |
| 137 | TUNCALI C E, FAINEKOS G, ITO H, et al. Simulation-based adversarial test generation for autonomous vehicles with machine learning components[C/OL]. 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1555-1562. |
| 138 | TUNCALI C E, FAINEKOS G, PROKHOROV D, et al. Requirements-driven test generation for autonomous vehicles with machine learning components[J/OL]. IEEE Transactions on Intelligent Vehicles, 2020, 5(2): 265-280. DOI:10.1109/TIV.2019.2955903. |
| 139 | TUNCALI C E, FAINEKOS G. Rapidly-exploring random trees for testing automated vehicles[C/OL]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 661-666. |
| 140 | BEGLEROVIC H, STOLZ M, HORN M. Testing of autonomous vehicles using surrogate models and stochastic optimization[C/OL]. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama: IEEE, 2017: 1-6. |
| 141 | NABHAN M, SCHOENAUER M, TOURBIER Y, et al. Optimizing coverage of simulated driving scenarios for the autonomous vehicle[C/OL]. 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE). Graz, Austria: IEEE, 2019: 1-5. |
| 142 | GANGOPADHYAY B, KHASTGIR S, DEY S, et al. Identification of test cases for automated driving systems using bayesian optimization[C/OL]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 1961-1967. |
| 143 | ABEYSIRIGOONAWARDENA Y, SHKURTI F, DUDEK G. Generating adversarial driving scenarios in high-fidelity simulators[C/OL]. 2019 International Conference on Robotics and Automation (ICRA). Montreal, QC, Canada: IEEE, 2019: 8271-8277. |
| 144 | 邢星宇,吴旭阳,刘力豪,等.基于目标优化的自动驾驶决策规划系统自动化测试方法[J].同济大学学报(自然科学版), 2021,49(8):1162-1169. |
| XING X, WU X, LIU L, et al. Automatic testing method based on optimization algorithms for the decision and planing system of autonimous vehicles[J]. Journal of Tongji University(Natural Science), 2021, 49(8): 1162-1169. | |
| 145 | KLISCHAT M, ALTHOFF M. Generating critical test scenarios for automated vehicles with evolutionary algorithms[C/OL]. 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 2352-2358. |
| 146 | KLUCK F, ZIMMERMANN M, WOTAWA F, et al. Genetic algorithm-based test parameter optimization for ADAS system testing[C/OL]. 2019 IEEE 19th International Conference on Software Quality, Reliability and Security (QRS). Sofia, Bulgaria: IEEE, 2019: 418-425. |
| 147 | BETTS K M, PETTY M D. Automated search-based robustness testing for autonomous vehicle software[J/OL]. Modelling and Simulation in Engineering, 2016, 2016: 1-15. |
| 148 | SCHEIBLER, KARSTEN, et al. Solving constraint systems from traffic scenarios for the validation of autonomous driving[C]. Proc. of the 4th SC-square Workshop. 2019. |
| 149 | ZHU B, SUN Y, ZHAO J, et al. A critical scenario search method for intelligent vehicle testing based on the social cognitive optimization algorithm[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(8): 7974-7986. |
| 150 | ZHU B, ZHANG P, ZHAO J, et al. Hazardous scenario enhanced generation for automated vehicle testing based on optimization searching method[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7321-7331. |
| 151 | SCHULZE T, MÜLLER B, MEYER G. Advanced microsystems for automotive applications 2015: smart systems for green and automated driving[M/OL]. Cham: Springer International Publishing, 2016. |
| 152 | JESENSKI S, STELLET J E, SCHIEGG F, et al. Generation of scenes in intersections for the validation of highly automated driving functions[C/OL]. 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 502-509. |
| 153 | ROCKLAGE E, KRAFT H, KARATAS A, et al. Automated scenario generation for regression testing of autonomous vehicles[C/OL]. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama: IEEE, 2017: 476-483. |
| 154 | YANG J, HE H, ZHANG Y, et al. Adaptive testing for connected and automated vehicles with sparse control variates in overtaking scenarios: arXiv:2207.09259[R/OL]. arXiv, 2022[2023-02-10]. |
| 155 | DE GELDER E, CATOR E, PAARDEKOOPER J P, et al. Constrained sampling from a kernel density estimator to generate scenarios for the assessment of automated vehicles[M/OL]. arXiv, 2021. |
| 156 | MULLINS G E, STANKIEWICZ P G, GUPTA S K. Automated generation of diverse and challenging scenarios for test and evaluation of autonomous vehicles[C/OL]. 2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore, Singapore: IEEE, 2017: 1443-1450. |
| 157 | MULLINS G E, STANKIEWICZ P G, HAWTHORNE R C, et al. Adaptive generation of challenging scenarios for testing and evaluation of autonomous vehicles[J/OL]. Journal of Systems and Software, 2018, 137: 197-215. |
| 158 | CORSO A, DU P, DRIGGS-CAMPBELL K, et al. Adaptive stress testing with reward augmentation for autonomous vehicle validatio[C/OL]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 163-168. |
| 159 | KOREN M, KOCHENDERFER M J. Adaptive stress testing without domain heuristics using go-explore[C/OL]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-6. |
| 160 | KOREN M, KOCHENDERFER M. Efficient autonomy validation in simulation with adaptive stress testing[M/OL]. arXiv, 2019. |
| 161 | DU P, DRIGGS-CAMPBELL K. Finding diverse failure scenarios in autonomous systems using adaptive stress testing[J/OL]. SAE International Journal of Connected and Automated Vehicles, 2019, 2(4): 241-251. |
| 162 | FENG S, FENG Y, SUN H, et al. Testing scenario library generation for connected and automated vehicles: an adaptive framework[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1213-1222. |
| 163 | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part i: methodology[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1573-1582. |
| 164 | FENG S, FENG Y, SUN H, et al. Testing scenario library generation for connected and automated vehicles, part II: case studies[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 5635-5647. |
| 165 | DING W, CHEN B, XU M, et al. Learning to collide: an adaptive safety-critical scenarios generating method[M/OL]. arXiv, 2020. |
| 166 | DING W, CHEN B, LI B, et al. Multimodal safety-critical scenarios generation for decision-making algorithms evaluation[M/OL]. arXiv, 2020. |
| 167 | YAN X, FENG S, SUN H, et al. Distributionally consistent simulation of naturalistic driving environment for autonomous vehicle testing[J/OL]. arXiv, 2021. |
| 168 | WANG F, LI L, HU J M, et al. A MARKOV-process inspired ca model of highway traffic[J/OL]. International Journal of Modern Physics C, 2009, 20(1): 117-131. |
| 169 | HAMDAR S H, MAHMASSANI H S, TREIBER M. From behavioral psychology to acceleration modeling: calibration, validation, and exploration of drivers’ cognitive and safety parameters in a risk-taking environment[J/OL]. Transportation Research Part B: Methodological, 2015, 78: 32-53. |
| 170 | YANG H H, PENG H. Development of an errorable car-following driver model[J/OL]. Vehicle System Dynamics, 2010, 48(6): 751-773. |
| 171 | GIPPS P G. A behavioural car-following model for computer simulation[J]. Transportation Research Part B: Methodological, 1981, 15(2): 105-111. |
| 172 | KESTING A, TREIBER M, HELBING D. General lane-changing model MOBIL for car-following models[J]. Transportation Research Record, 2007, 1999(1): 86-94. |
| 173 | GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. |
| 174 | TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805. |
| 175 | CHEN X, LI L, ZHANG Y. A Markov model for headway/spacing distribution of road traffic[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(4): 773-785. |
| 176 | LI L, CHEN X (Micheal), ZHANG L. A global optimization algorithm for trajectory data based car-following model calibration[J/OL]. Transportation Research Part C: Emerging Technologies, 2016, 68: 311-332. |
| 177 | OSORIO C, PUNZO V. Efficient calibration of microscopic car-following models for large-scale stochastic network simulators[J/OL]. Transportation Research Part B: Methodological, 2019, 119: 156-173. |
| 178 | ZHU M, WANG X, TARKO A, et al. Modeling car-following behavior on urban expressways in Shanghai: a naturalistic driving study[J/OL]. Transportation Research Part C: Emerging Technologies, 2018, 93: 425-445. |
| 179 | JOSEPH J, DOSHI-VELEZ F, HUANG A S, et al. A Bayesian nonparametric approach to modeling motion patterns[J/OL]. Autonomous Robots, 2011, 31(4): 383-400. |
| 180 | HUANG Z, LAM H, LEBLANC D J, et al. Accelerated evaluation of automated vehicles using piecewise mixture models[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2845-2855. |
| 181 | HUANG Z, ZHAO D, LAM H, et al. Evaluation of automated vehicles in the frontal cut-in scenario-an enhanced approach using piecewise mixture models[C/OL]. 2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore, Singapore: IEEE, 2017: 197-202. |
| 182 | TREIBER M, KESTING A. The intelligent driver model with stochasticity -new insights into traffic flow oscillations[J/OL]. Transportation Research Procedia, 2017, 23: 174-187. |
| 183 | LAVAL J A, TOTH C S, ZHOU Y. A parsimonious model for the formation of oscillations in car-following models[J/OL]. Transportation Research Part B: Methodological, 2014, 70: 228-238. |
| 184 | HE Z, ZHENG L, GUAN W. A simple nonparametric car-following model driven by field data[J/OL]. Transportation Research Part B: Methodological, 2015, 80: 185-201. |
| 185 | BARAO M, MARQUES J S. Clustering of gaussian random vector fields in multiple trajectory modelling[C/OL]. 2018 13th APCA International Conference on Control and Soft Computing (CONTROLO). Ponta Delgada: IEEE, 2018: 352-357. |
| 186 | GUO Y, KALIDINDI V V, ARIEF M, et al. Modeling multi-vehicle interaction scenarios using gaussian random field: arXiv:1906.10307[R/OL]. arXiv, 2019. |
| 187 | ZHANG W, WANG W, ZHU J, et al. Multi-vehicle interaction scenarios generation with interpretable traffic primitives and Gaussian process regression[C/OL]. 2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 1197-1204. |
| 188 | DING W, XU M, ZHAO D. CMTS: conditional multiple trajectory synthesizer for generating safety-critical driving scenarios[M/OL]. arXiv, 2019. |
| 189 | TAN S, WONG K, WANG S, et al. SceneGen: learning to generate realistic traffic scenes[M/OL]. arXiv, 2021. |
| 190 | JENKINS I R, GEE L O, KNAUSS A, et al. Accident scenario generation with recurrent neural networks[C/OL]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI: IEEE, 2018: 3340-3345. |
| 191 | KRAJEWSKI R, MOERS T, MEISTER A, et al. BézierVAE: improved trajectory modeling using variational autoencoders for the safety validation of highly automated vehicles[C/OL]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 3788-3795. |
| 192 | DING W, WANG W, ZHAO D. A multi-vehicle trajectories generator to simulate vehicle-to-vehicle encountering scenarios[C/OL]. 2019 International Conference on Robotics and Automation (ICRA). Montreal, QC, Canada: IEEE, 2019: 4255-4261. |
| 193 | HUANG X, SUN J, SUN J. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J/OL]. Transportation Research Part C: Emerging Technologies, 2018, 95: 346-362. |
| 194 | WANG X, JIANG R, LI L, et al. Capturing car-following behaviors by deep learning[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 910-920. |
| 195 | XIE D F, FANG Z Z, JIA B, et al. A data-driven lane-changing model based on deep learning[J/OL]. Transportation Research Part C: Emerging Technologies, 2019, 106: 41-60. |
| 196 | ZHANG X, SUN J, QI X, et al. Simultaneous modeling of car-following and lane-changing behaviors using deep learning[J/OL]. Transportation Research Part C: Emerging Technologies, 2019, 104: 287-304. |
| 197 | YOON J, JARRETT D, VAN DER SCHAAR M. Time-series generative adversarial networks[C]. Advances in Neural Information Processing Systems 32 (2019). |
| 198 | DEMETRIOU A, ALFSVÅG H, RAHROVANI S, et al. A deep learning framework for generation and analysis of driving scenario trajectories[J/OL]. SN Computer Science, 2023, 4(3): 251. |
| 199 | DEMETRIOU A, ALLSVAG H, RAHROVANI S, et al. Generation of driving scenario trajectories with generative adversarial networks[C/OL]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-6. |
| 200 | ZHU M, WANG X, WANG Y. Human-like autonomous car-following model with deep reinforcement learning[J/OL]. Transportation Research Part C: Emerging Technologies, 2018, 97: 348-368. |
| 201 | SHIROSHITA S, MARUYAMA S, NISHIYAMA D, et al. Behaviorally diverse traffic simulation via reinforcement learning[C/OL]. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, NV, USA: IEEE, 2020: 2103-2110. |
| 202 | KARUNAKARAN D, WORRALL S, NEBOT E. Efficient statistical validation with edge cases to evaluate highly automated vehicles[C/OL]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-8. |
| 203 | WACHI A. Failure-scenario maker for rule-based agent using multi-agent adversarial reinforcement learning and its application to autonomous driving[M/OL]. arXiv, 2019. |
| 204 | KUEFLER A, MORTON J, WHEELER T, et al. Imitating driver behavior with generative adversarial networks[C/OL]. 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 204-211. |
| 205 | BHATTACHARYYA R, WULFE B, PHILLIPS D J, et al. Modeling human driving behavior through generative adversarial imitation learning[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(3): 2874-2887. |
| 206 | TALEBPOUR A, MAHMASSANI H S, HAMDAR S H. Modeling lane-changing behavior in a connected environment: a game theory approach[J/OL]. Transportation Research Procedia, 2015, 7: 420-440. |
| 207 | OYLER D W, YILDIZ Y, GIRARD A R, et al. A game theoretical model of traffic with multiple interacting drivers for use in autonomous vehicle development[C/OL]. 2016 American Control Conference (ACC). Boston, MA, USA: IEEE, 2016: 1705-1710. |
| 208 | LI N, OYLER D W, ZHANG M, et al. Game theoretic modeling of driver and vehicle interactions for verification and validation of autonomous vehicle control systems[J/OL]. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1782-1797. |
| 209 | LI N, OYLER D, ZHANG M, et al. Hierarchical reasoning game theory based approach for evaluation and testing of autonomous vehicle control systems[C/OL]. 2016 IEEE 55th Conference on Decision and Control (CDC). Las Vegas, NV, USA: IEEE, 2016: 727-773. |
| 210 | ALBABA B M, YILDIZ Y. Driver modeling through deep reinforcement learning and behavioral game theory[J/OL]. IEEE Transactions on Control Systems Technology, 2022, 30(2): 885-892. |
| 211 | WANG X, PENG H, ZHANG S, et al. An Interaction-aware evaluation method for highly automated vehicles[C/OL]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). Indianapolis, IN, USA: IEEE, 2021: 394-401. |
| 212 | NA X, COLE D J. Experimental evaluation of a game-theoretic human driver steering control model[J/OL]. IEEE Transactions on Cybernetics, 2023, 53(8): 4791-4804. |
| 213 | QIN X, ARÉCHIGA N, BEST A, et al. Automatic testing and falsification with dynamically constrained reinforcement learning[J]. arXiv preprint arXiv:, 2019. |
| 214 | XIE Y, DAI K, ZHANG Y. A real-time critical-scenario-generation framework for testing autonomous driving system[M/OL]. arXiv, 2022. |
| 215 | CHEN B, CHEN X, WU Q, et al. Adversarial evaluation of autonomous vehicles in lane-change scenarios[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10333-10342. |
| 216 | BEHZADAN V, MUNIR A. Adversarial reinforcement learning framework for benchmarking collision avoidance mechanisms in autonomous vehicles[J/OL]. IEEE Intelligent Transportation Systems Magazine, 2021, 13(2): 236-241. |
| 217 | SUN H, FENG S, YAN X, et al. Corner case generation and analysis for safety assessment of autonomous vehicles[J/OL]. Transportation Research Record, 2021, 2675(11): 587-600. |
| 218 | MULLINS G E, DRESS A G, STANKIEWICZ P G, et al. Accelerated testing and evaluation of autonomous vehicles via imitation learning[C]. 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018: 5636-5642. |
| 219 | ZHAO D, LAM H, PENG H, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(3): 595-607. |
| 220 | ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 733-744. |
| 221 | O'KELLY M, et al. Scalable end-to-end autonomous vehicle testing via rare-event simulation[C]. Advances in Neural Information Processing Systems 31 (2018). |
| 222 | JESENSKI S, ROTHERT J, TIEMANN N, et al. Using sum-product networks for the generation of vehicle populations on highway sections[C/OL]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-7. |
| 223 | HUANG Z, LAM H, ZHAO D. An accelerated testing approach for automated vehicles with background traffic described by joint distributions[C/OL]. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama: IEEE, 2017: 933-938. |
| 224 | HUANG Z, GUO Y, ARIEF M, et al. A versatile approach to evaluating and testing automated vehicles based on kernel methods[C/OL]. 2018 Annual American Control Conference (ACC). Milwaukee, WI: IEEE, 2018: 4796-4802. |
| 225 | HUANG Z, LAM H, ZHAO D. Towards affordable on-track testing for autonomous vehicle - a Kriging-based statistical approach[C/OL]. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama: IEEE, 2017: 1-6. |
| 226 | HUANG Z, LAM H, ZHAO D. Sequential experimentation to efficiently test automated vehicles[C/OL]. 2017 Winter Simulation Conference (WSC). Las Vegas, NV: IEEE, 2017: 3078-3089. |
| 227 | WANG X, PENG H, ZHAO D. Combining reachability analysis and importance sampling for accelerated evaluation of highly automated vehicles at pedestrian crossing[C/OL]. Volume 3, Rapid Fire Interactive Presentations: Advances in Control Systems; Advances in Robotics and Mechatronics; Automotive and Transportation Systems; Motion Planning and Trajectory Tracking; Soft Mechatronic Actuators and Sensors; Unmanned Ground and Aerial Vehicles. Park City, Utah, USA: American Society of Mechanical Engineers, 2019: V003T18A01. |
| 228 | XU M, HUANG P, LI F, et al. Accelerated policy evaluation: learning adversarial environments with adaptive importance sampling[J]. arXiv e-prints, 2021: arXiv: . |
| 229 | ARIEF M, BAI Y, DING W, et al. Certifiable deep importance sampling for rare-event simulation of black-box systems[J]. arXiv preprint arXiv:, 2021. |
| 230 | ARIEF M, HUANG Z, KUMAR G K S, et al. Deep probabilistic accelerated evaluation: a robust certifiable rare-event simulation methodology for black-box safety-critical systems[M/OL]. arXiv, 2021. |
| 231 | ARIEF M, CEN Z, LIU Z, et al. Test against high-dimensional uncertainties: accelerated evaluation of autonomous vehicles with deep importance sampling[M/OL]. arXiv, 2022. |
| 232 | FENG S, YAN X, SUN H, et al. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J/OL]. Nature Communications, 2021, 12(1): 748. |
| 233 | FENG S, SUN H, YAN X, et al. Dense reinforcement learning for safety validation of autonomous vehicles[J]. Nature, 2023, 615(7953): 620-627.. |
| 234 | YAN X, ZOU Z, FENG S, et al. Learning naturalistic driving environment with statistical realism[J/OL]. Nature Communications, 2023, 14(1): 2037. |
| 235 | BOSS M, JAMPANI V, BRAUN R, et al. Neural-PIL: neural pre-integrated lighting for reflectance decomposition[M/OL]. arXiv, 2021. |
| 236 | SRINIVASAN P P, DENG B, ZHANG X, et al. NeRV: neural reflectance and visibility fields for relighting and view synthesis[C/OL]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, TN, USA: IEEE, 2021: 7491-7500. |
| 237 | ZHANG X, SRINIVASAN P P, DENG B, et al. NeRFactor: neural factorization of shape and reflectance under an unknown illumination[J/OL]. ACM Transactions on Graphics, 2021, 40. |
| 238 | WANG Z, CHEN W, ACUNA D, et al. Neural light field estimation for street scenes with differentiable virtual object insertion[M/OL]. arXiv, 2022. |
| 239 | ARNELID H, ZEC E L, MOHAMMADIHA N. Recurrent conditional generative adversarial networks for autonomous driving sensor modelling[C/OL]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 1613-1618. |
| 240 | YANG Z, CHEN Y, WANG J, et al. UniSim: a neural closed-loop sensor simulator[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023. |
| 241 | XIONG Y, MA W C, WANG J, et al. Learning compact representations for LiDAR completion and generation[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023. |
| 242 | MILDENHALL B, et al. Nerf: representing scenes as neural radiance fields for view synthesis[C]. Communications of the ACM 65.1 (2021): 99-106. |
| 243 | YANG Z, MANIVASAGAM S, CHEN Y, et al. Reconstructing objects in-the-wild for realistic sensor simulation[C/OL]. 2023 IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023: 11661-11668. |
| 244 | TANCIK M, CASSER V, YAN X, et al. Block-NeRF: scalable large scene neural view synthesis[C/OL]. 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, LA, USA: IEEE, 2022: 8238-8248. |
| 245 | YEN-CHEN L, FLORENCE P, BARRON J T, et al. iNeRF: inverting neural radiance fields for pose estimation[C/OL]. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague, Czech Republic: IEEE, 2021: 1323-1330. |
| 246 | LIN C H, et al. Barf: Bundle-adjusting neural radiance fields[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021. |
| 247 | LI Y, LIN Z H, FORSYTH D, et al. ClimateNeRF: extreme weather synthesis in neural radiance field[M/OL]. arXiv, 2023. |
| 248 | WANG, et al. CADSim: robust and scalable in-the-wild 3D reconstruction for controllable sensor simulation[C]. 6th Annual Conference on Robot Learning. 2022. |
| 249 | WANG F Y, ZHENG N N, CAO D, et al. Parallel driving in CPSS: a unified approach for transport automation and vehicle intelligence[J/OL]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 577-587. |
| 250 | LI L, WANG X, WANG K, et al. Parallel testing of vehicle intelligence via virtual-real interaction[J/OL]. Science Robotics, 2019, 4(28): eaaw4106. |
| 251 | WANG F Y, WANG X, LI L, et al. Steps toward parallel intelligence[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4): 345-348. |
| 252 | LI L, WEN D. Parallel systems for traffic control: a rethinking[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 1179-1182. |
| 253 | LI L, LIN Y L, ZHENG N N, et al. Artificial intelligence test: a case study of intelligent vehicles[J/OL]. Artificial Intelligence Review, 2018, 50(3): 441-465. |
| 254 | WANG F Y, SONG R, ZHOU R, et al. Verification and validation of intelligent vehicles: objectives and efforts from China[J/OL]. IEEE Transactions on Intelligent Vehicles, 2022, 7(2): 164-169. |
| 255 | FENG S, FENG Y, YAN X, et al. Safety assessment of highly automated driving systems in test tracks: a new framework[J/OL]. Accident Analysis & Prevention, 2020, 144: 105664. |
| 256 | FRIES A, FAHRENKROG F, DONAUER K, et al. Driver behavior model for the safety assessment of automated driving[C/OL]. 2022 IEEE Intelligent Vehicles Symposium (IV). Aachen, Germany: IEEE, 2022: 1669-1674. |
| 257 | ZHANG J, MA Z, ZHU X. Analysis of the driver’s breaking response in the safety cut-in scenario based on naturalistic driving[C]. SAE Paper 2019-01-5053. |
| 258 | ZHANG Y, QUAN W, GAO Y, et al. Aerial dataset for china congested highway & expressway and its potential applications in automated driving systems development[J]. arXiv preprint, 2022. |
| 259 | XU Y, SHAO W, LI J, et al. SIND: A drone dataset at signalized intersection in China[C/OL]. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). Macau, China: IEEE, 2022: 2471-2478. |
| 260 | YANG H, OZBAY K, BARTIN B. Application of simulation-based traffic conflict analysis for highway safety evaluation[J]. Proceedings of the 12th WCTR, Lisbon, Portugal, 2010, 4. |
| 261 | YANG H. Simulation-based evaluation of traffic safety performance using surrogate safety measures[D]. Rutgers University-Graduate School, New Brunswick, 2012. |
| 262 | MAHMUD S M S, FERREIRA L, HOQUE Md S, et al. Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs[J/OL]. IATSS Research, 2017, 41(4): 153-163. DOI:10.1016/j.iatssr. 2017.02.001. |
| 263 | ESSA M, SAYED T. Full Bayesian conflict-based models for real time safety evaluation of signalized intersections[J/OL]. Accident Analysis & Prevention, 2019, 129: 367-381. |
| 264 | WACHENFELD W, JUNIETZ P, WENZEL R, et al. The worst-time-to-collision metric for situation identification[C/OL]. 2016 IEEE Intelligent Vehicles Symposium (IV). Gotenburg, Sweden: IEEE, 2016: 729-734. |
| 265 | MINDERHOUD M M, BOVY P H L. Extended time-to-collision measures for road traffic safety assessment[J/OL]. Accident Analysis & Prevention, 2001, 33(1): 89-97. |
| 266 | LI G, YANG Y, ZHANG T, et al. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios[J/OL]. Transportation Research Part C: Emerging Technologies, 2021, 122: 102820. |
| 267 | JIAXIANG Q, ZHANG S, WEIWEN D, et al. Study on comprehensive evaluation index of front collision hazard of intelligent vehicle[C/OL]. New Energy & Intelligent Connected Vehicle Technology Conference. 2019: 2019-01-5044. |
| 268 | WANG Y, TU H, SZE N N, et al. A novel traffic conflict risk measure considering the effect of vehicle weight[J/OL]. Journal of Safety Research, 2022, 80: 1-13. |
| 269 | OZBAY K, YANG H, BARTIN B, et al. Derivation and validation of new simulation-based surrogate safety measure[J]. Transportation Research Record, 2008, 2083(1): 105-113. |
| 270 | ARCHER J. Indicators for traffic safety assessment and prediction and their application in micro-simulation modelling: a study of urban and suburban intersections[D]. KTH, 2005. |
| 271 | CUNTO F J C. Assessing safety performance of transportation systems using microscopic simulation[D]. University of Waterbo, 2008. |
| 272 | WISHART J, COMO S, ELLI M, et al. Driving safety performance assessment metrics for ADS-equipped vehicles[J/OL]. SAE International Journal of Advances and Current Practices in Mobility, 2020, 2(5): 2881-2899. |
| 273 | SHALEV-SHWARTZ S, SHAMMAH S, SHASHUA A. On a formal model of safe and scalable self-driving cars[J]. arXiv preprint arXiv:, 2017. |
| 274 | POLYCHRONOPOULOS A, TSOGAS M, AMDITIS A, et al. Dynamic situation and threat assessment for collision warning systems: the EUCLIDE approach[C]. IEEE Intelligent Vehicles Symposium, 2004. IEEE, 2004: 636-641. |
| 275 | IIDA Y, UNO N, ITSUBO S, et al. Traffic conflict analysis and modeling of lane-changing behavior at weaving section[C]. Proceedings of Infrastructure Planning, 2001, 24(1): 305-308. |
| 276 | UNO N, IIDA Y, ITSUBO S, et al. A microscopic analysis of traffic conflict caused by lane-changing vehicle at weaving section[C]. Proceedings of the 13th mini-EURO Conference-Handling Uncertainty in the Analysis of Traffic and Transportation Systems, Bari, Italy. 2002: 10-13. |
| 277 | GUIDO G, SACCOMANNO F, VITALE A, et al. Comparing safety performance measures obtained from video capture data[J]. Journal of Transportation Engineering, 2011, 137(7): 481-491. |
| 278 | ASTARITA V, GUIDO G, VITALE A. A new microsimulation model for the evaluation of traffic safety performances[J]. European Transport Trasport Europei, 2012(51). |
| 279 | KITAJIMA S, TAKATORI O, ENOKIDA S, et al. Estimation of driver’s dangerous states of rear-end collision based on driver video recorder data and ordinary driving data[J]. Proceedings of Automotive Engineers of Japan, 2009, 97: 89-97. |
| 280 | CAO X, YOUNG W, SARVI M, et al. Automatic discrimination of traffic conflicts during lane changing manoeuvres[C]. ARRB Conference, 26th, 2014, Sydney, New South Wales, Australia. 2014 (7.3). |
| 281 | SHI X, WONG Y D, LI M Z F, et al. Key risk indicators for accident assessment conditioned on pre-crash vehicle trajectory[J/OL]. Accident Analysis & Prevention, 2018, 117: 346-356. |
| 282 | CHAN C Y. Defining safety performance measures of driver-assistance systems for intersection left-turn conflicts[C/OL]. 2006 IEEE Intelligent Vehicles Symposium. Meguro-Ku, Japan: IEEE, 2006: 25-30. |
| 283 | WANG H, HUANG Y, KHAJEPOUR A, et al. Crash mitigation in motion planning for autonomous vehicles[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(9): 3313-3323. |
| 284 | WANG J, WU J, LI Y. The driving safety field based on driver-vehicle-road interactions[J/OL]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. |
| 285 | BAGDADI O, VÁRHELYI A. Jerky driving-an indicator of accident proneness?[J/OL]. Accident Analysis & Prevention, 2011, 43(4): 1359-1363. |
| 286 | PEK C, ZAHN P, ALTHOFF M. Verifying the safety of lane change maneuvers of self-driving vehicles based on formalized traffic rules[C/OL]. 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 1477-1483. |
| 287 | YU W, ZHAO C, LIU J, et al. No driver, no regulation? -online legal driving behavior monitoring for self-driving vehicles[M/OL]. arXiv, 2023. |
| [1] | 胡林,谷子逸,王丹琦,王方,邹铁方,黄晶. 汽车安全性测评规程现状及趋势展望[J]. 汽车工程, 2024, 46(2): 187-200. |
| [2] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [3] | 王庞伟,刘程,汪云峰,张名芳. 面向城市道路的智能网联汽车多车道轨迹优化方法[J]. 汽车工程, 2024, 46(2): 241-252. |
| [4] | 刘济铮,王震坡,孙逢春,张雷. 异构智能网联汽车编队延迟补偿控制研究[J]. 汽车工程, 2023, 45(9): 1573-1582. |
| [5] | 白先旭,左瑜,李维汉,石琴,李楚照,赵树廉,陈炯. 自动紧急制动系统控制模块的SOTIF量化评价[J]. 汽车工程, 2023, 45(9): 1655-1665. |
| [6] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [7] | 李升波,占国建,蒋宇轩,兰志前,张宇航,邹文俊,陈晨,成波,李克强. 类脑学习型自动驾驶决控系统的关键技术[J]. 汽车工程, 2023, 45(9): 1499-1515. |
| [8] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [9] | 朱冰,姜泓屹,赵健,韩嘉懿,刘彦辰. 智能网联汽车协同感知信任度动态计算与评价方法[J]. 汽车工程, 2023, 45(8): 1383-1391. |
| [10] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [11] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [12] | 关宇昕,冀浩杰,崔哲,李贺,陈丽文. 智能网联汽车车载CAN网络入侵检测方法综述[J]. 汽车工程, 2023, 45(6): 922-935. |
| [13] | 胡耘浩,李克强,向云丰,石佳,罗禹贡. 智能网联汽车通用跨平台实时仿真系统架构及应用[J]. 汽车工程, 2023, 45(3): 372-381. |
| [14] | 刘浩天,魏洪乾,时培成,张幽彤. 基于帧间隔-总线电压混合特征的汽车ECU伪装攻击识别[J]. 汽车工程, 2023, 45(11): 2070-2081. |
| [15] | 李捷,吴晓东,许敏,刘永刚. 基于强化学习的城市场景多目标生态驾驶策略[J]. 汽车工程, 2023, 45(10): 1791-1802. |
|