汽车工程 ›› 2023, Vol. 45 ›› Issue (3): 372-381.doi: 10.19562/j.chinasae.qcgc.2023.03.004
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
胡耘浩,李克强,向云丰,石佳,罗禹贡( )
)
Yunhao Hu,Keqiang Li,Yunfeng Xiang,Jia Shi,Yugong Luo()
摘要:
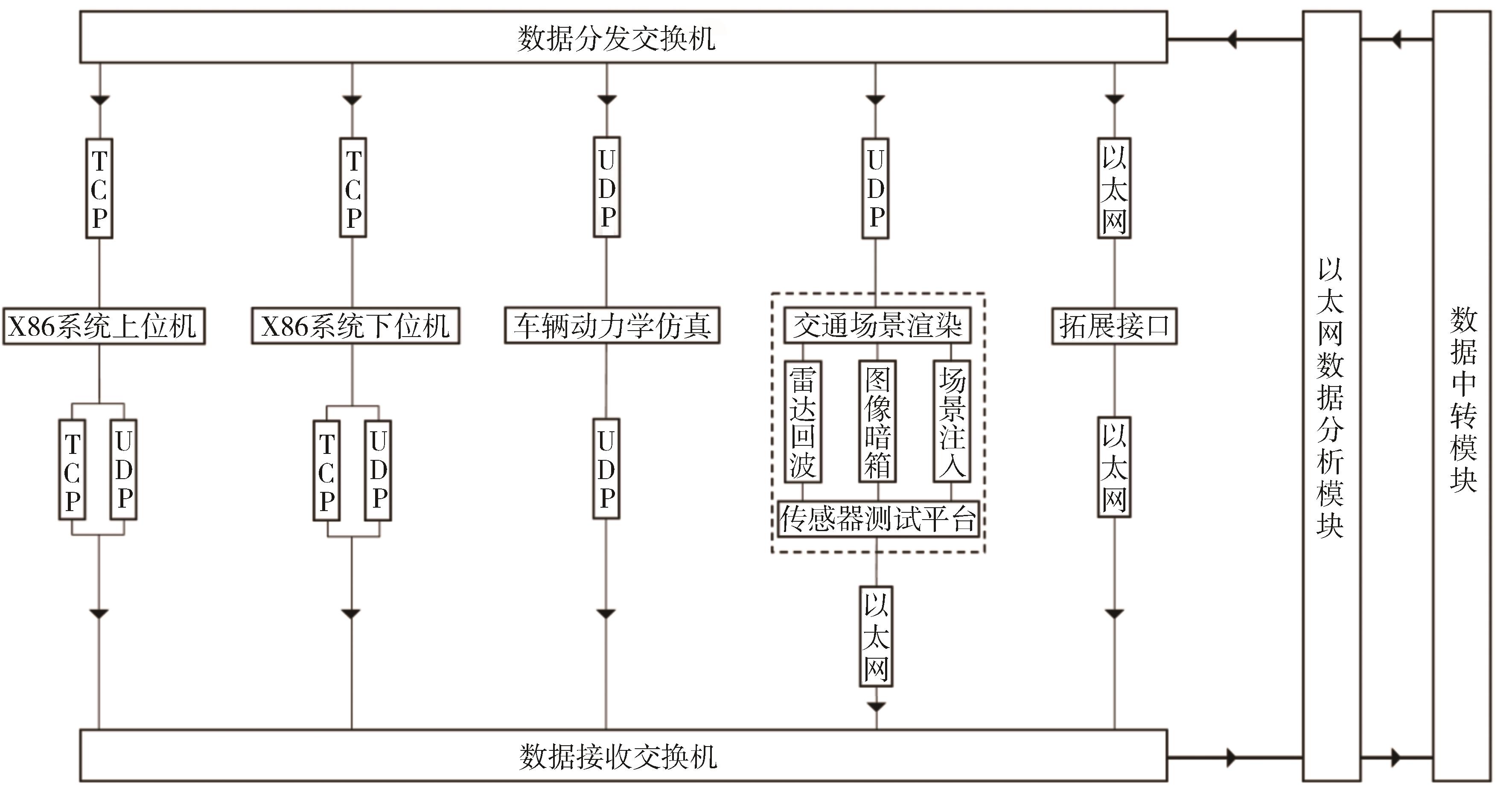
为解决跨平台实时仿真测试过程中数据通信方式不通用、系统架构多样且难拓展、缺乏跨平台多软件数据同步方式的问题,本文中提出了一种面向智能网联汽车的跨平台实时仿真系统架构。首先借鉴车载以太网传输层通信协议设计多仿真平台间数据通信,构建通用数据通信交互方式;其次,根据智能网联汽车系统测试需求,确定所需的实时测试平台、车辆动力学仿真平台、传感器测试平台及以太网测试平台,参考汽车总线的分布式架构,设计通用且可拓展的跨平台实时仿真系统架构;最后,建立数据中转平台作为系统数据通信中枢,实现多软件、多平台运行同步。以前方侧翻智能避障算法为例进行应用验证,结果表明,基于跨平台实时仿真系统架构所设计的仿真测试系统,可通过数据中转模块调节被测算法及多平台、多软件的仿真速度,低时延的通信方式及实时硬件仿真平台,保证多平台、多软件实时同步运行,数据交互通信方式统一,系统架构具备通用性、拓展性。