汽车工程 ›› 2023, Vol. 45 ›› Issue (9): 1573-1582.doi: 10.19562/j.chinasae.qcgc.2023.09.007
所属专题: 智能网联汽车技术专题-控制2023年
刘济铮1,2,王震坡1,2,孙逢春1,2,张雷1,2( )
)
收稿日期:2023-05-23
修回日期:2023-06-08
出版日期:2023-09-25
发布日期:2023-09-23
通讯作者:
张雷
E-mail:lei_zhang@bit.edu.cn
基金资助:
Jizheng Liu1,2,Zhenpo Wang1,2,Fengchun Sun1,2,Lei Zhang1,2()
Received:2023-05-23
Revised:2023-06-08
Online:2023-09-25
Published:2023-09-23
Contact:
Lei Zhang
E-mail:lei_zhang@bit.edu.cn
摘要:
智能网联汽车多车编队行驶可有效缩短跟车间距和提升交通系统通行效率,但多车编队控制须解决异构编队控制器的普适性问题,且能够在执行器响应延迟和通讯延迟情况下保证车辆编队的弦稳定性。本文提出一种面向异构智能网联汽车编队的延迟补偿控制方法,在无须获取他车系统动力学参数及控制输入前提下,利用他车加速度信息即可实现车辆编队纵向跟踪控制;此外,提出一种基于Smith预测器的延迟补偿控制架构,分别消除和降低了执行器响应延迟和通讯延迟对车辆编队弦稳定性的影响。典型工况仿真结果表明,相较常见车辆编队控制方法,本文提出的异构车辆编队延迟补偿控制器的跟车误差降低了80.7%,有效减小了最小车头时距和跟车间距。
刘济铮,王震坡,孙逢春,张雷. 异构智能网联汽车编队延迟补偿控制研究[J]. 汽车工程, 2023, 45(9): 1573-1582.
Jizheng Liu,Zhenpo Wang,Fengchun Sun,Lei Zhang. Research on Delay Compensation Control for Heterogeneous Connected and Automated Vehicle Platoons[J]. Automotive Engineering, 2023, 45(9): 1573-1582.

图1
异构车辆编队示意图"

图2
3阶动力学控制器的系统框图"
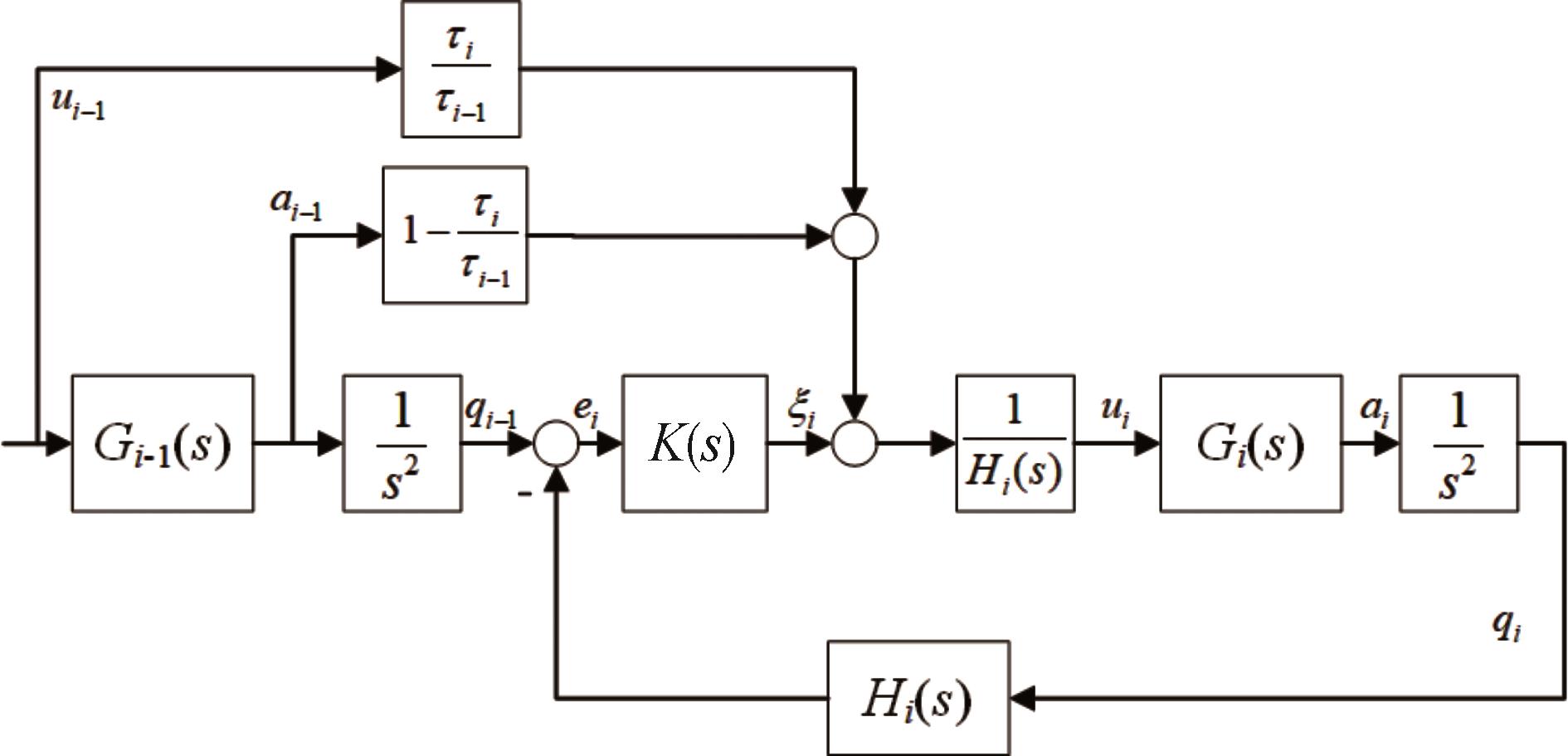

图 3
有延迟和无延迟控制效果对比"

图 4
控制器的系统框图"
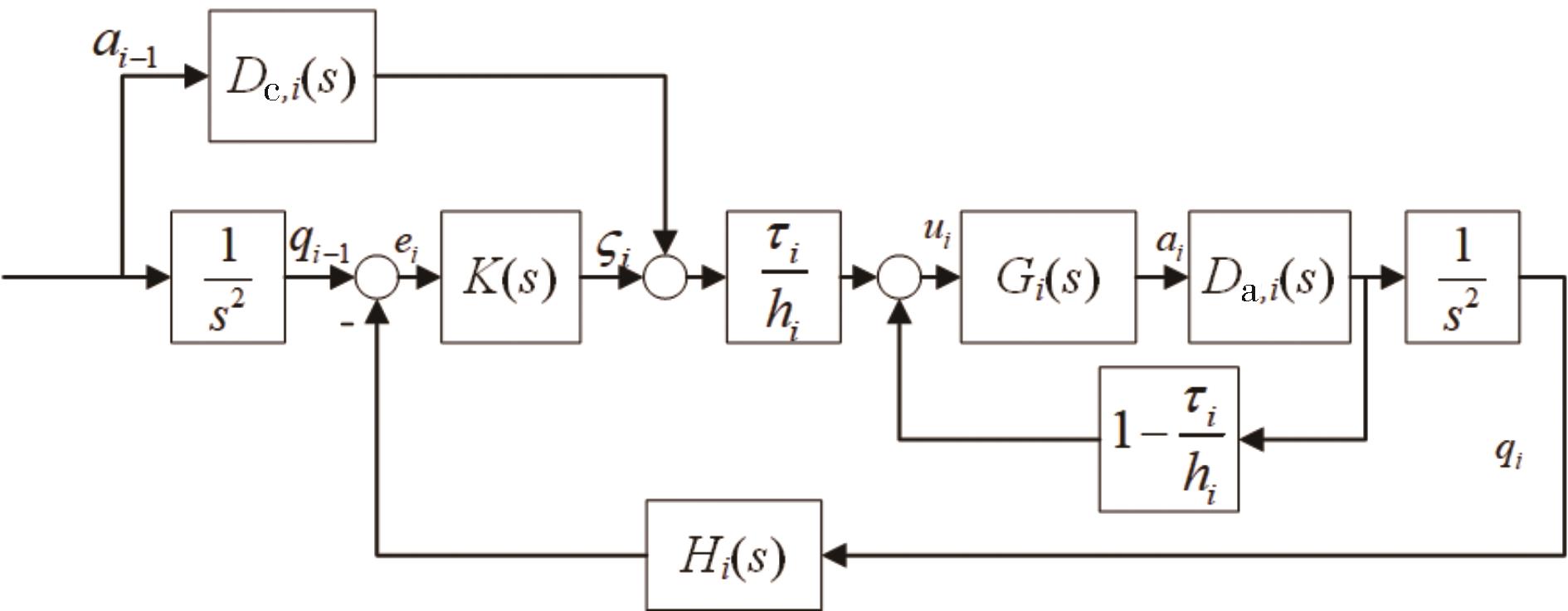
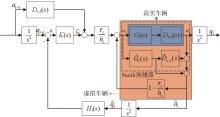
图 5
基于Smith预测器的异构车辆编队控制流程图"
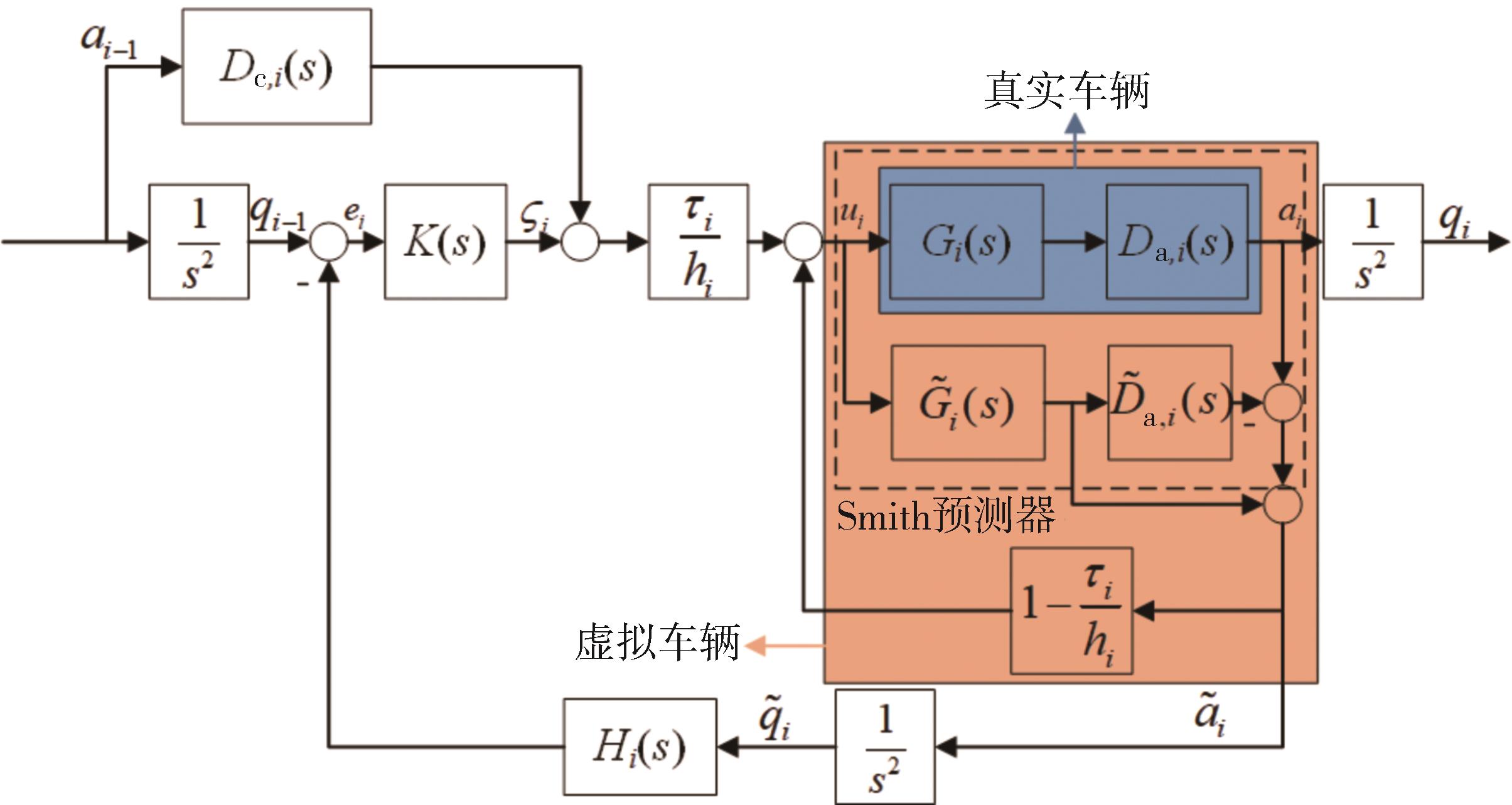
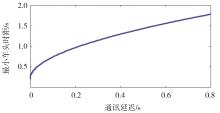
图 6
最小车头时距和通讯延迟关系图"
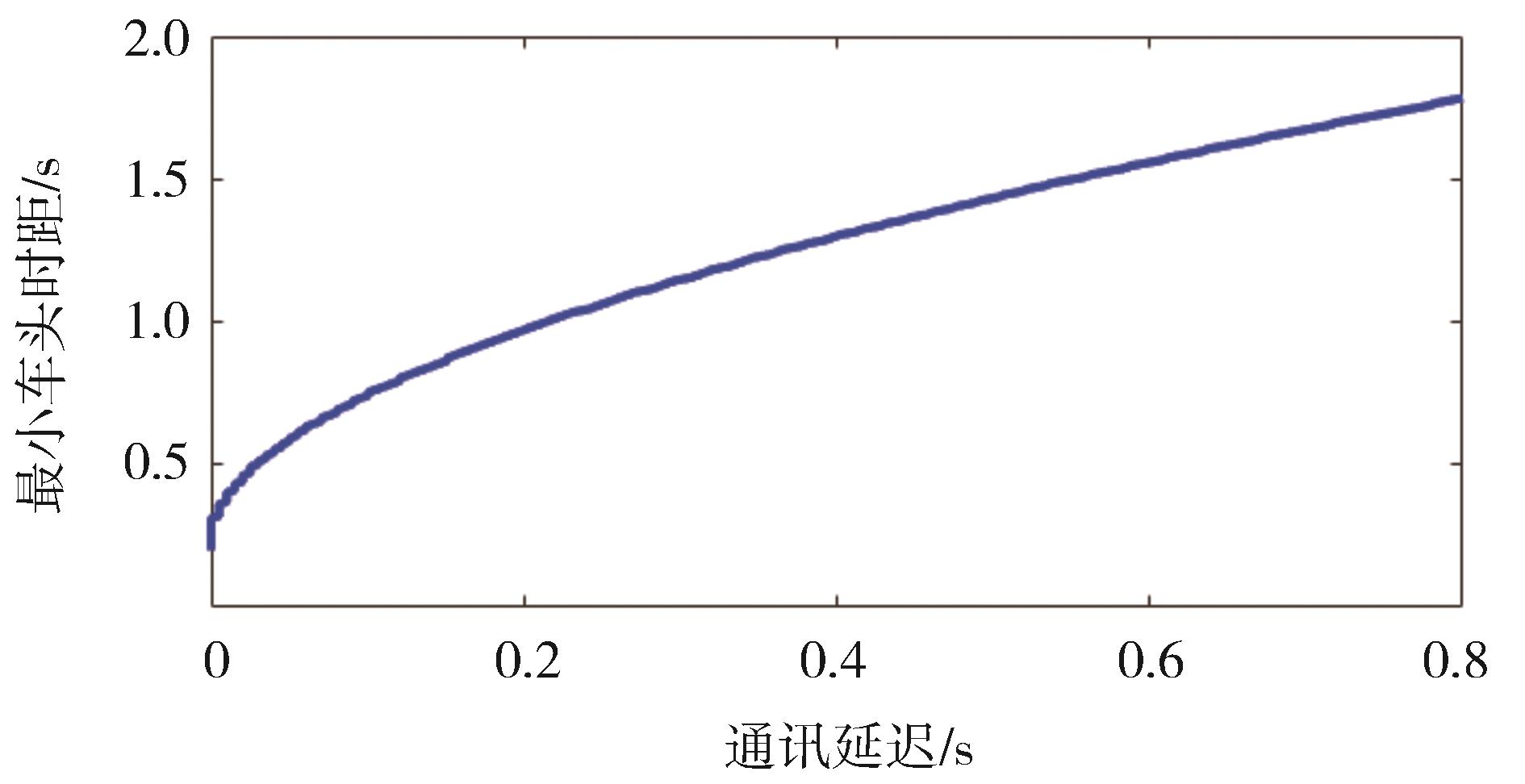
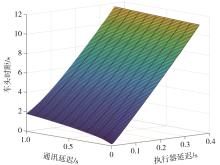
图 7
最小车头时距与通讯延迟及执行器延迟关系图"
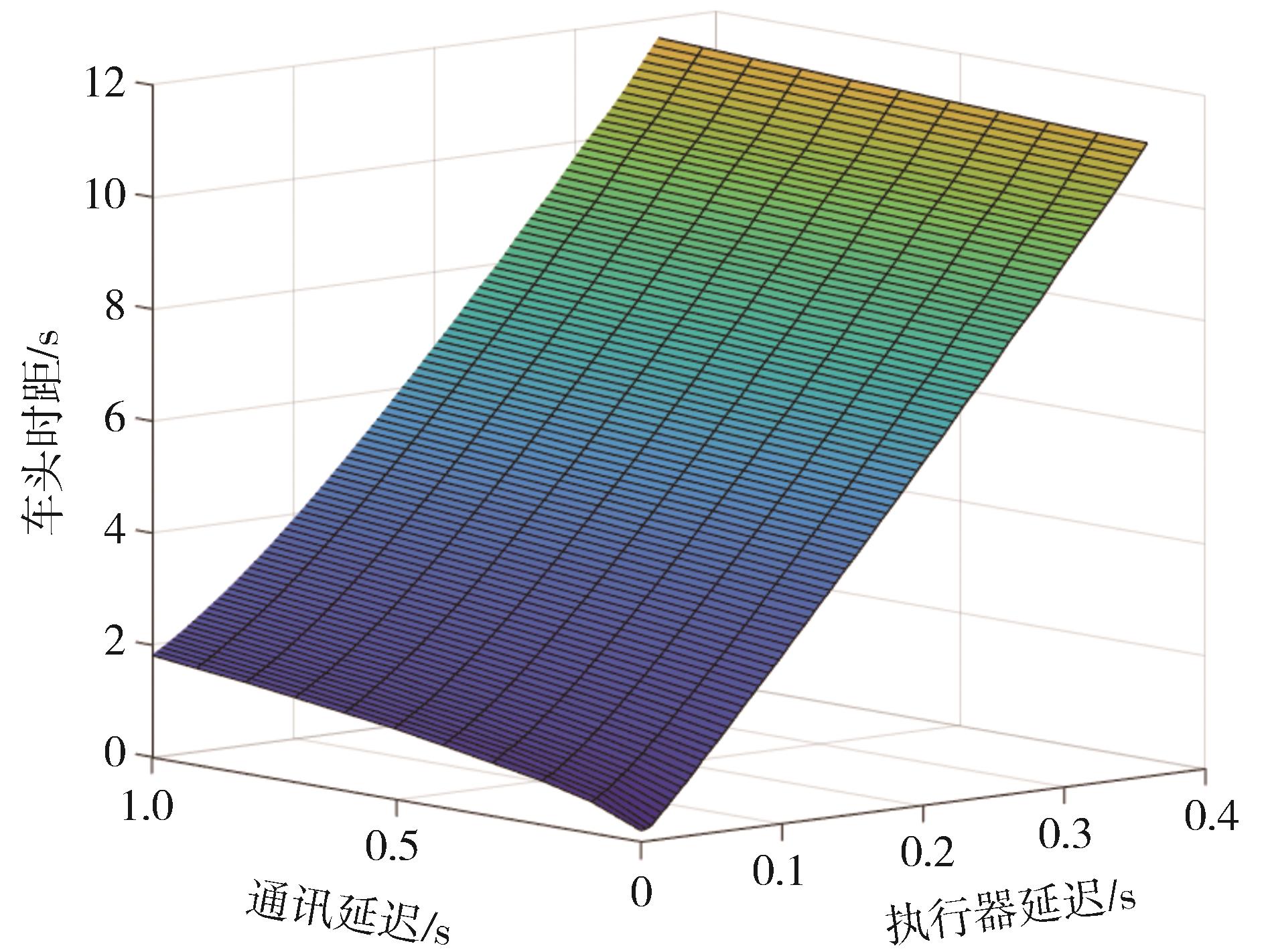
表 1
车辆及控制器参数设置"
| Kp | Kd | Kdd | τi | L | r |
|---|---|---|---|---|---|
| 0.2 | 0.7 - Kpτi | 0 | [0.6, 0.2, 0.4, 0.2, 0.2] | 5 m | 1 m |
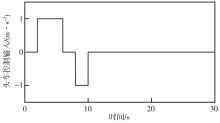
图 8
头车控制输入"
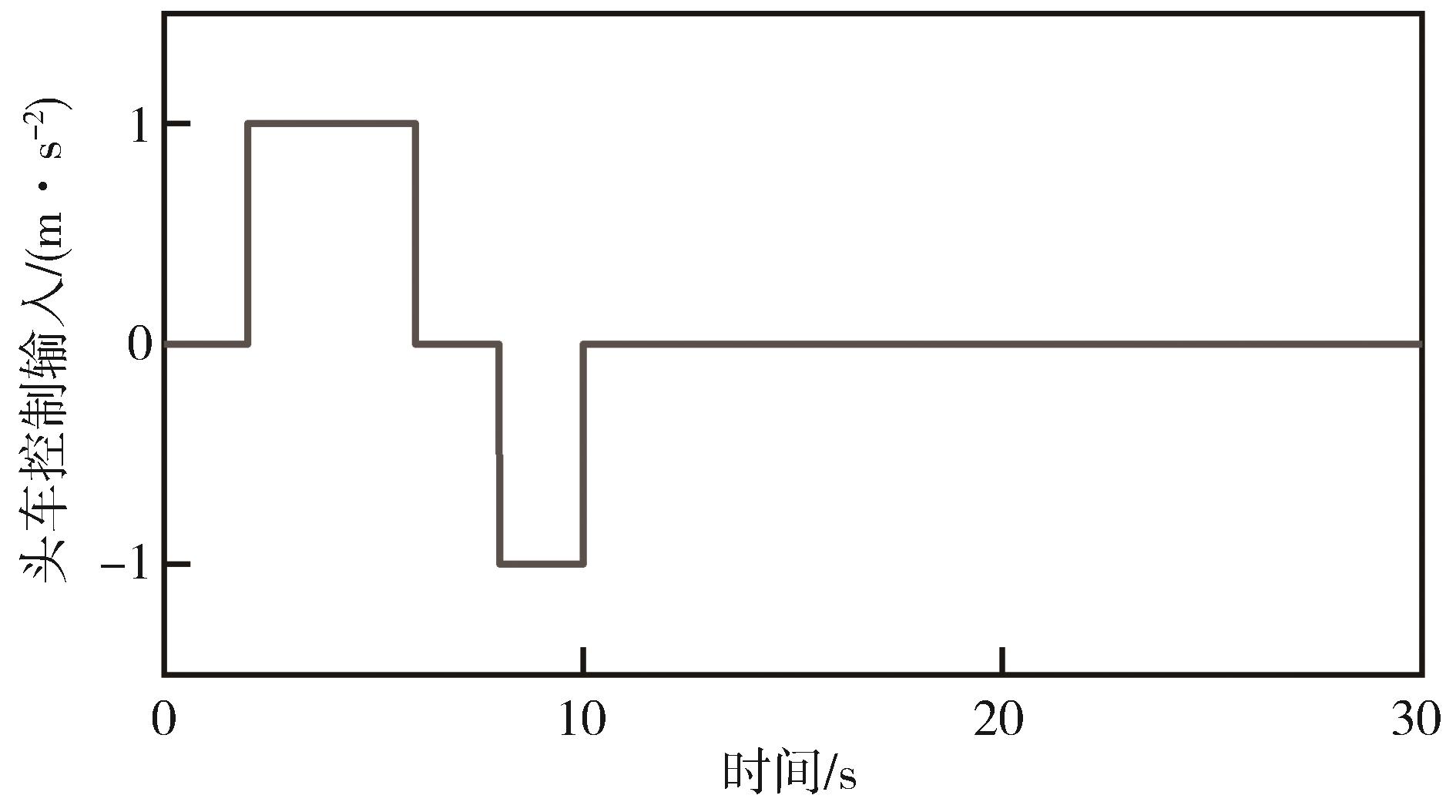

图 9
无延迟下的仿真结果对比"


图 10
仅有执行器延迟情况下的仿真结果对比"
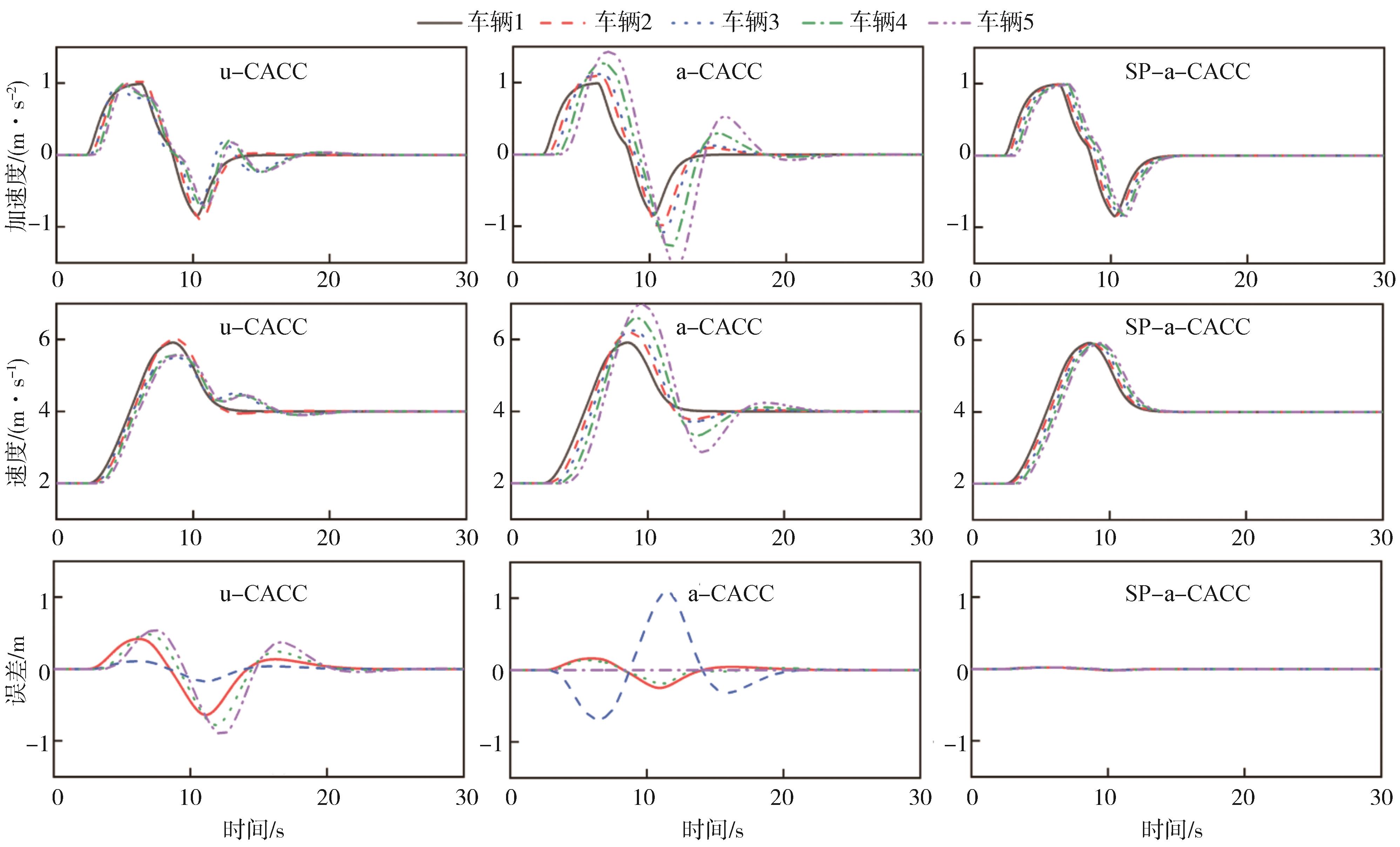

图 11
有执行器延迟、通讯延迟情况下的仿真结果对比"

表 2
3种常见跟车控制器控制效果对比"
| 工况 | 控制器 | 最大跟踪误差/m | 弦稳定性 |
|---|---|---|---|
| φi =0 s | u-CACC | ≈0 | 有 |
| θi =0 s | a-CACC | ≈0 | 有 |
| hi =0.21 s | SP-a-CACC | ≈0 | 有 |
| φi =0.2 s | u-CACC | 有 | |
| θi =0 s | a-CACC | 无 | |
| hi =0.21 s | SP-a-CACC | 有 | |
| φi =0.2 s | u-CACC | 有 | |
| θi =0.1 s | a-CACC | 无 | |
| hi =0.7 s | SP-a-CACC | 有 |
| 1 | 李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12): 1595-1605. |
| LI K Q, CHANG X Y, LI J W, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020, 42(12): 1595-1605. | |
| 2 | LI S E, ZHENG Y, LI K, et al. Dynamical modeling and distributed control of connected and automated vehicles: challenges and opportunities[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(3): 46-58. |
| 3 | LONG K, HU J, GAO Z, et al. Optimal controller for a roundabout with cooperative optimization[J]. Journal of Transportation Engineering Part A: Systems, 2023, 149(1): 04022118. |
| 4 | 李鹏飞, 罗禹贡, 刘畅, 等. 智能网联车辆队列紧急工况控制策略设计[J]. 汽车工程, 2022, 44(3): 299-307. |
| LI P F, LUO Y G, LIU C, et al. Control strategies design of intelligent and connected vehicle platoon under emergency conditions[J]. Automotive Engineering, 2022, 44(3): 299-307. | |
| 5 | WANG Z, BIAN Y, SHLADOVER S E, et al. A survey on cooperative longitudinal motion control of multiple connected and automated vehicles[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 12(1): 4-24. |
| 6 | LI Y, ZHONG Z, SONG Y, et al. Longitudinal platoon control of connected vehicles: analysis and verification[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4225- 4235. |
| 7 | WANG M, DAAMEN W, HOOGENDOORN S P, et al. Rolling horizon control framework for driver assistance systems. Part II: Cooperative sensing and cooperative control[J]. Transportation Research Part C: Emerging Technologies, 2014, 40(mar.): 290-311. |
| 8 | MILANES V, SHLADOVER S E, SPRING J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1):296-305. |
| 9 | 杨泽宇, 黄晋, 胡展溢, 等. 严格避撞的车辆队列分布式鲁棒控制[J]. 汽车工程, 2020, 42(10): 1312-1319. |
| YANG Z Y, HUANG J, HU Z Y, et al. Distributed robust control of vehicle platoon for strict collision avoidance[J]. Automotive Engineering, 2020, 42(10): 1312-1319. | |
| 10 | SHEIKHOLESLAM S, DESOER C A. Longitudinal control of a platoon of vehicles[C]. American Control Conference. 1990: 291-296. |
| 11 | STANKOVIC S, STANOJEVIC M, SILJAK D. Decentralized overlapping control of a platoon of vehicles[J]. IEEE Transactions on Control Systems Technology, 2000, 8(5): 816-832. |
| 12 | PLOEG J, SCHEEPERS B, NUNEN E, et al. Design and experimental evaluation of cooperative adaptive cruise control[C]. 14th International IEEE Conference on Intelligent Transportation Systems. IEEE, 2011: 260-265. |
| 13 | LEFEBER E, PLOEG J, NIJMEIJER H. Cooperative adaptive cruise control of heterogeneous vehicle platoons[J]. IFAC-PapersOnLine, 2020, 53(2): 15217-15222. |
| 14 | WIJNBERGEN P, JEENINGA M, BESSELINK B. Nonlinear spacing policies for vehicle platoons: a geometric approach to decentralized control[J]. Systems & Control Letters, 2021, 153: 104954. |
| 15 | 胡满江, 卜令坤, 秦洪懋, 等. 多类时延下混合车辆队列建模与协同控制[J]. 汽车工程, 2022, 44(9): 1359-1371. |
| HU M J, BU L K, QIN H M, et al. Modeling and cooperative control of mixed vehicle platoon under multi-time delay[J]. Automotive Engineering, 2022, 44(9): 1359-1371. | |
| 16 | XING H, PLOEG J, NIJMEIJER H. Smith predictor compensating for vehicle actuator delays in cooperative ACC systems[J]. IEEE Transactions on Vehicular Technology, 2018, 68(2): 1106-1115. |
| 17 | DUNBAR W B, CAVENEY D S. Distributed receding horizon control of vehicle platoons: stability and string stability[J]. IEEE Transactions on Automatic Control, 2012, 57(3):620-633. |
| 18 | LIN Y, MCPHEE J, AZAD N L. Longitudinal dynamic versus kinematic models for car-following control using deep reinforcement learning[C]. 2019 IEEE Intelligent Transportation Systems Conference. IEEE, 2019: 1504-1510. |
| 19 | ZHANG Y, BAI Y, WANG M, et al. Cooperative adaptive cruise control with robustness against communication delay: an approach in the space domain[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 5496-5507. |
| 20 | XU L, ZHUANG W, YIN G, et al. Modeling and robust control of heterogeneous vehicle platoon on curved road subject to disturbances and delays[J]. IEEE Transactions on Vehicular Technology, 2019, 68(99):11551-11564. |
| 21 | XU L, ZHUANG W, YIN G, et al. Stable longitudinal control of heterogeneous vehicular platoon with disturbances and information delays[J]. IEEE Access, 2018, 6: 69794-69806. |
| 22 | YU G, WONG P K, HUANG W, et al. Distributed adaptive consensus protocol for connected vehicle platoon with heterogeneous time-varying delays and switching topologies[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 17620-17631. |
| 23 | TIAN B, WANG G, XU Z, et al. Communication delay compensation for string stability of CACC system using LSTM prediction[J]. Vehicular Communications, 2021, 29: 100333. |
| 24 | AN L, YANG X, HU J. Modeling system dynamics of mixed traffic with partial connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022,23(9):15755-15764. |
| 25 | LIU J, WANG Z, ZHANG L. Integrated vehicle-following control for four-wheel-independent-drive electric vehicles against non-ideal V2X communication[J]. IEEE Transactions on Vehicular Technology, 2022, 71(4): 3648-3659. |
| 26 | SMITH B. A controller to overcome deadtime[C]. Isa J, 1959, 6(2): 28-33. |
| 27 | XING H, PLOEG J. Smith predictor compensating for vehicle actuator delays in cooperative ACC systems[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1106-1115. |
| [1] | 胡林,谷子逸,王丹琦,王方,邹铁方,黄晶. 汽车安全性测评规程现状及趋势展望[J]. 汽车工程, 2024, 46(2): 187-200. |
| [2] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [3] | 王庞伟,刘程,汪云峰,张名芳. 面向城市道路的智能网联汽车多车道轨迹优化方法[J]. 汽车工程, 2024, 46(2): 241-252. |
| [4] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [5] | 李升波,占国建,蒋宇轩,兰志前,张宇航,邹文俊,陈晨,成波,李克强. 类脑学习型自动驾驶决控系统的关键技术[J]. 汽车工程, 2023, 45(9): 1499-1515. |
| [6] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [7] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [8] | 朱冰,姜泓屹,赵健,韩嘉懿,刘彦辰. 智能网联汽车协同感知信任度动态计算与评价方法[J]. 汽车工程, 2023, 45(8): 1383-1391. |
| [9] | 关宇昕,冀浩杰,崔哲,李贺,陈丽文. 智能网联汽车车载CAN网络入侵检测方法综述[J]. 汽车工程, 2023, 45(6): 922-935. |
| [10] | 胡耘浩,李克强,向云丰,石佳,罗禹贡. 智能网联汽车通用跨平台实时仿真系统架构及应用[J]. 汽车工程, 2023, 45(3): 372-381. |
| [11] | 刘浩天,魏洪乾,时培成,张幽彤. 基于帧间隔-总线电压混合特征的汽车ECU伪装攻击识别[J]. 汽车工程, 2023, 45(11): 2070-2081. |
| [12] | 李捷,吴晓东,许敏,刘永刚. 基于强化学习的城市场景多目标生态驾驶策略[J]. 汽车工程, 2023, 45(10): 1791-1802. |
| [13] | 钱立军,陈晨,陈健,陈欣宇,熊驰. 基于Q学习模型的无信号交叉口离散车队控制[J]. 汽车工程, 2022, 44(9): 1350-1358. |
| [14] | 钟文沁,孔伟伟,李志恒,于杰,罗禹贡. 不同渗透率下非信控交叉路口混合预约多车协同控制[J]. 汽车工程, 2022, 44(8): 1144-1152. |
| [15] | 陈一鹤,孔伟伟,于杰,李克强,罗禹贡. 混合交通下非信控交叉口队列预约式控制[J]. 汽车工程, 2022, 44(7): 953-959. |
|