汽车工程 ›› 2023, Vol. 45 ›› Issue (5): 768-776.doi: 10.19562/j.chinasae.qcgc.2023.05.006
所属专题: 智能网联汽车技术专题-规划&决策2023年
钱立军1,2( ),陈晨1,陈健1
),陈晨1,陈健1
Lijun Qian1,2(),Chen Chen1,Jian Chen1
摘要:
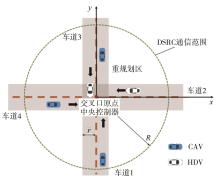
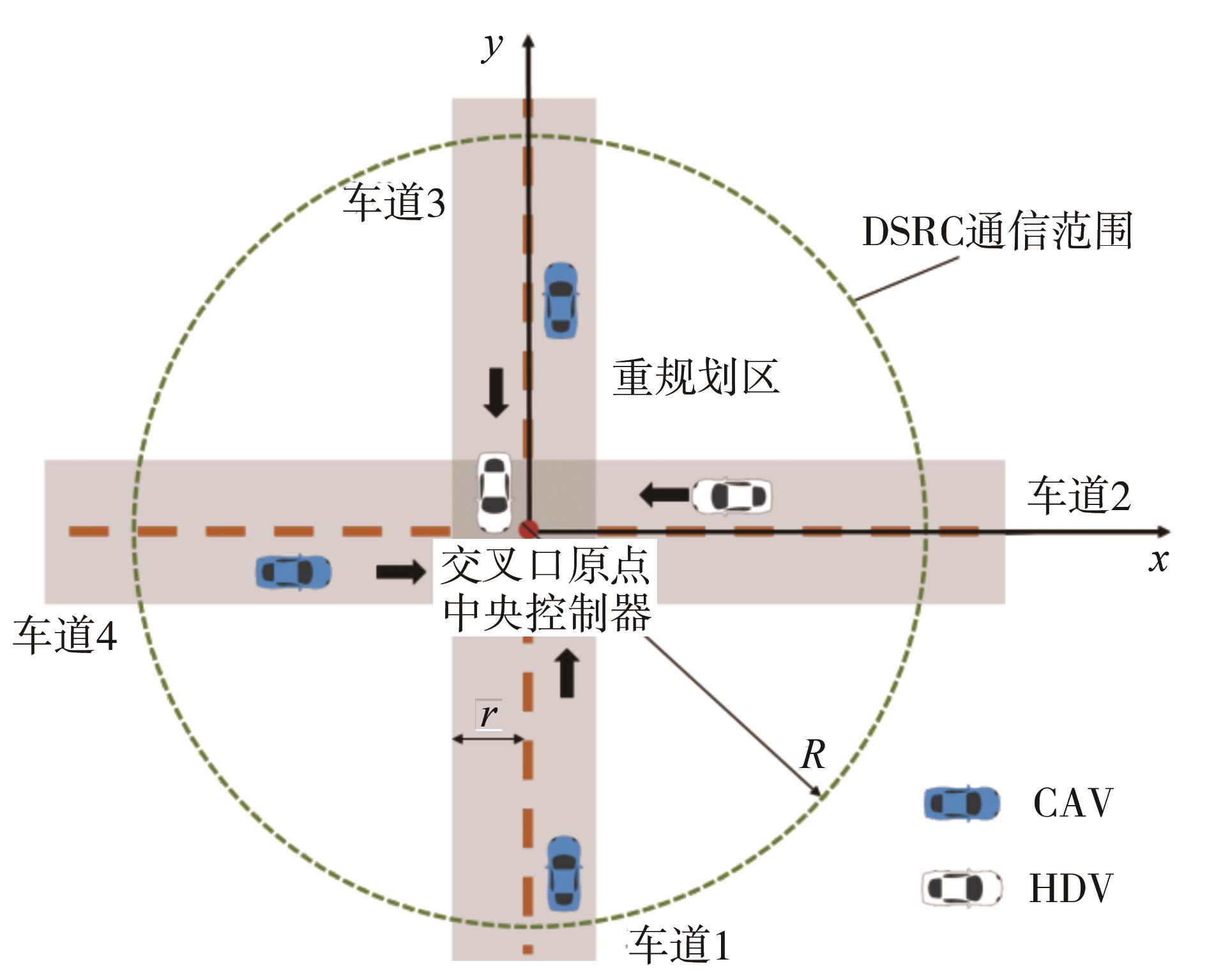
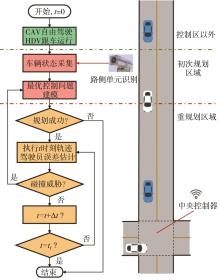
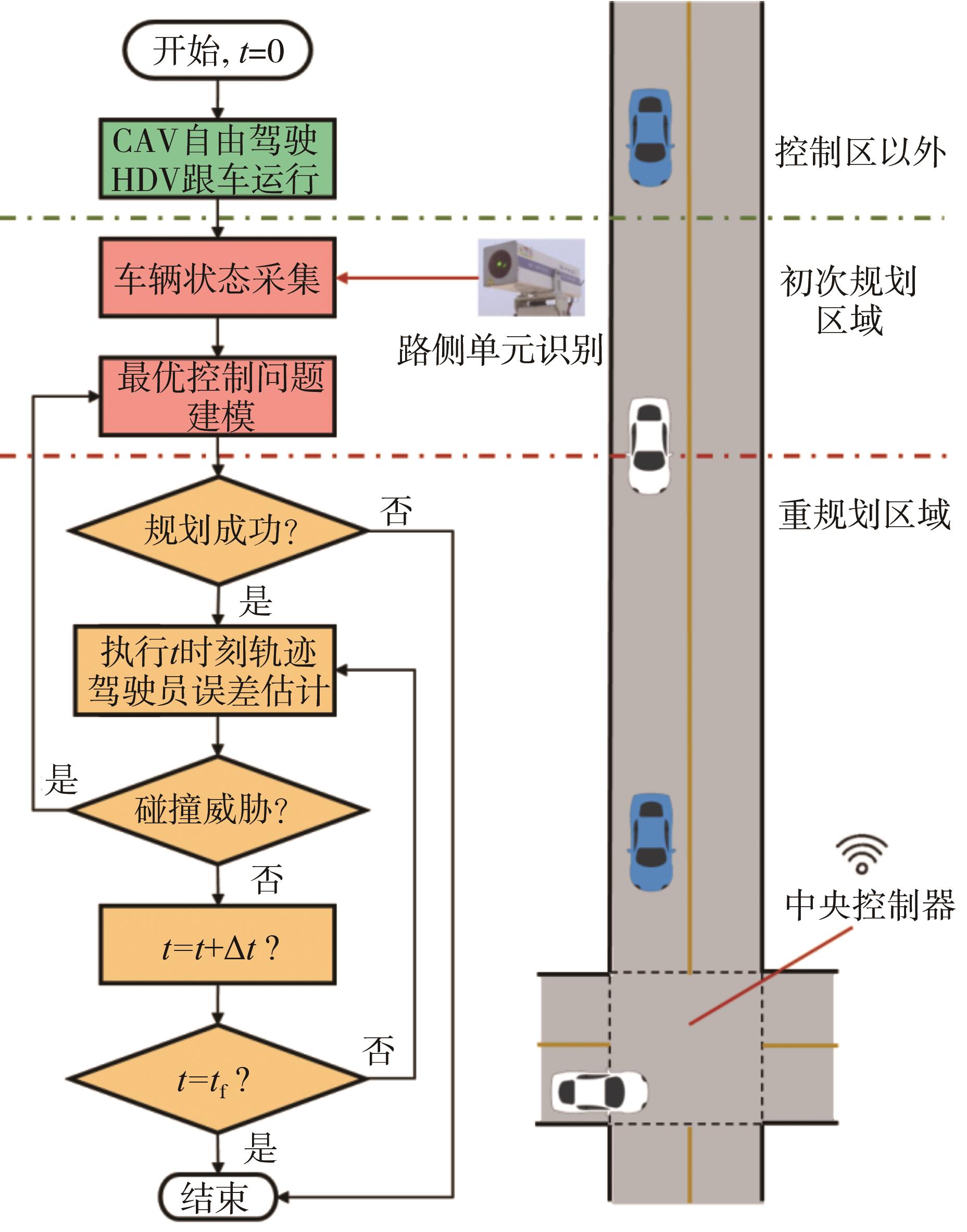
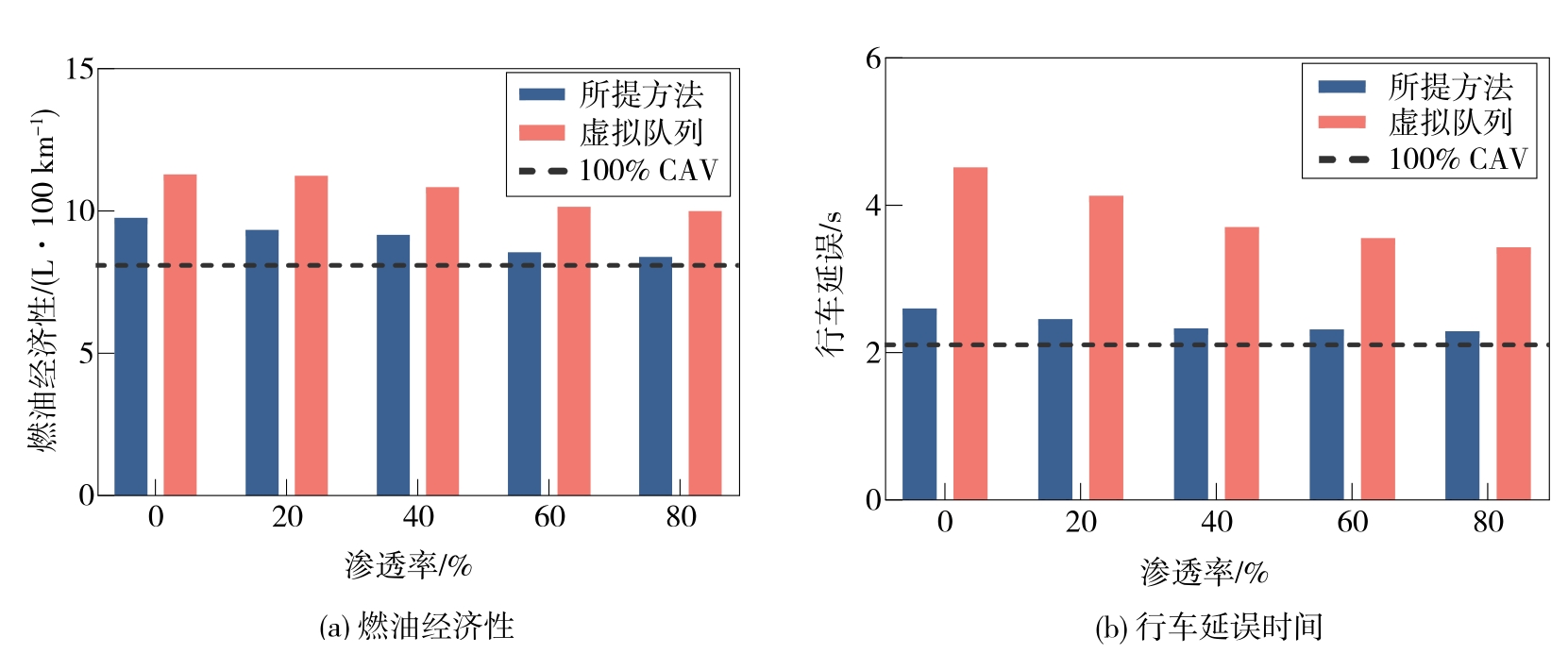
针对混合交通中人类驾驶汽车引起的碰撞隐患,提出一种考虑驾驶员误差的无信控交叉口集中式轨迹规划方法。首先,以最优控制框架设计了多车协同轨迹规划方法,以运动时间、燃油经济性和行车延误建立复合优化目标。其次,通过实车试验采集不同驾驶员的操作数据集,建立加速度误差的马尔科夫链误差转移概率矩阵。最后,基于车辆碰撞估计结果对可能发生事故情况进行重规划计算,并在不同自动驾驶市场渗透率工况下进行仿真验证。仿真结果表明,碰撞发生率和平均重规划次数与渗透率负相关。采用重规划方法后交叉口内的规划成功率可达90%以上,且燃油经济性等交通指标得到改善。