汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 978-986.doi: 10.19562/j.chinasae.qcgc.2021.07.004
牛国臣( ),李文帅,魏洪旭
),李文帅,魏洪旭
收稿日期:2020-09-02
修回日期:2021-01-27
出版日期:2021-07-25
发布日期:2021-07-20
通讯作者:
牛国臣
E-mail:niu_guochen@139.com
基金资助:
Guochen Niu(),Wenshuai Li,Hongxu Wei
Received:2020-09-02
Revised:2021-01-27
Online:2021-07-25
Published:2021-07-20
Contact:
Guochen Niu
E-mail:niu_guochen@139.com
摘要:
为满足智能汽车换道过程中安全性和舒适性的要求,提出了一种基于双五次多项式的智能汽车换道轨迹规划算法。以动态规划换道时间和增加舒适性约束条件来改进五次多项式规划算法,在该基础上结合当前环境和换道始末状态计算出中转状态,并采用两次改进的五次多项式算法避免与前方车辆碰撞。轨迹规划与轨迹跟踪的仿真和试验结果表明,对于不同的工况,本文中提出的双五次换道轨迹规划算法在横向速度、加速度、加速度变化率以及算法运行时间等方面都具有优势,得到的轨迹也满足实际状况下的车辆换道要求,安全性得到提升且操纵稳定性良好,证明该算法具有一定的实际应用价值。
牛国臣,李文帅,魏洪旭. 基于双五次多项式的智能汽车换道轨迹规划[J]. 汽车工程, 2021, 43(7): 978-986.
Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials[J]. Automotive Engineering, 2021, 43(7): 978-986.
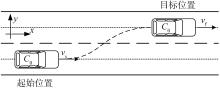
图 1
无障碍换道轨迹规划示意图"
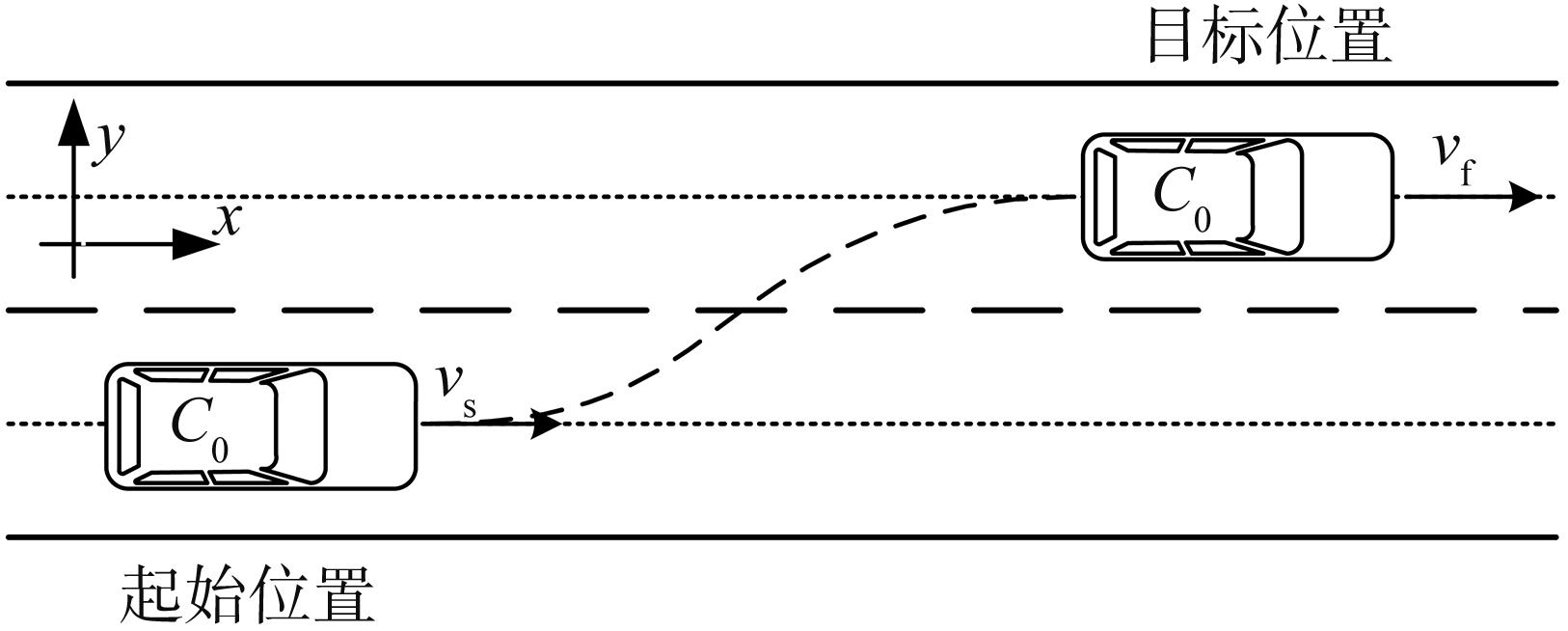
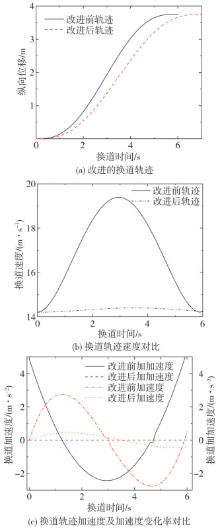
图 2
改进五次多项式"
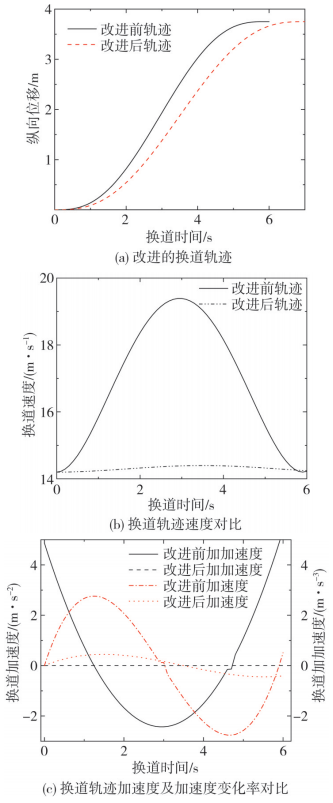
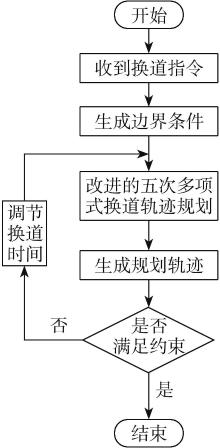
图 3
无障碍换道轨迹规划步骤"
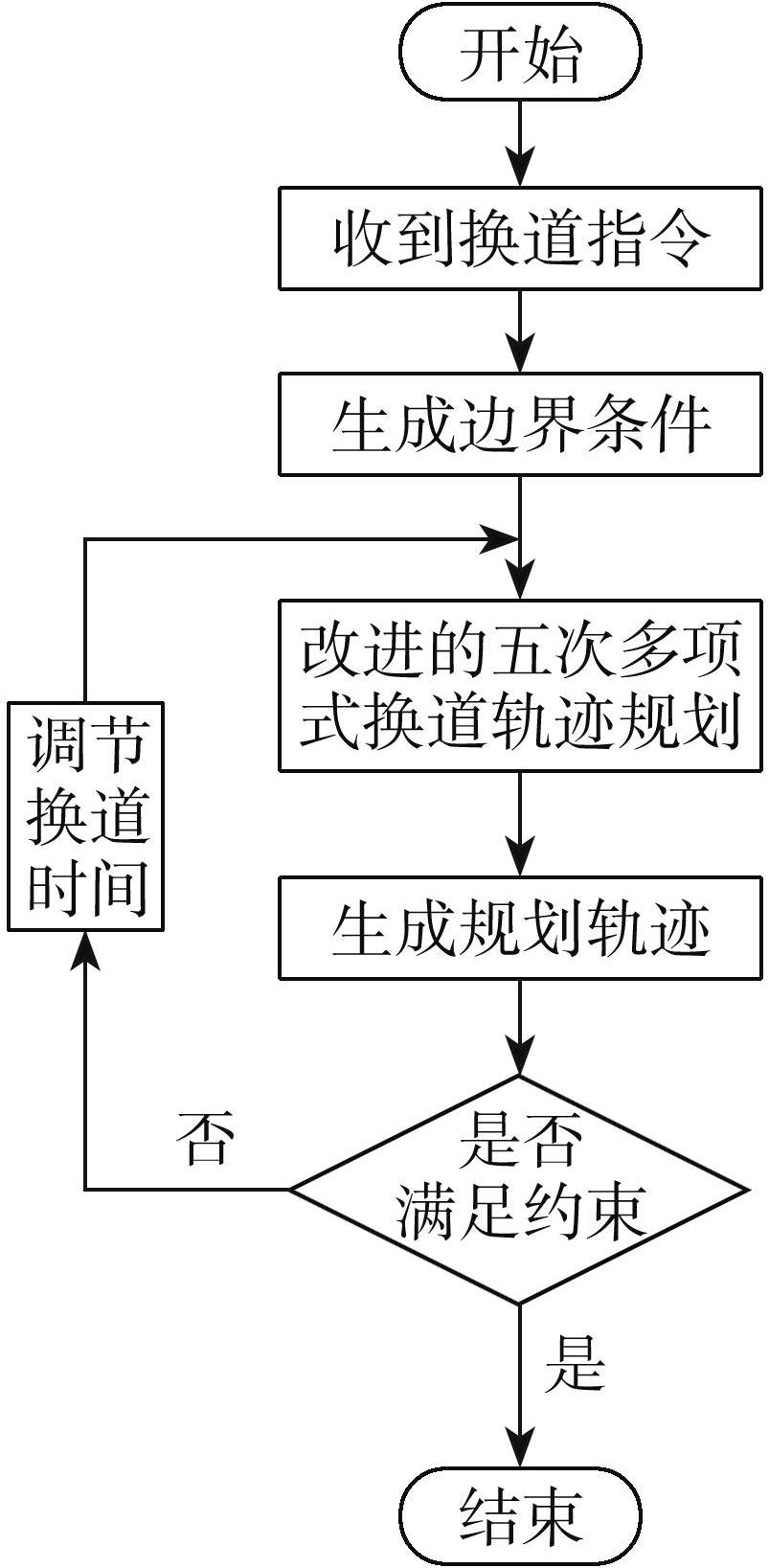
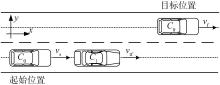
图 4
避障换道状况示意图"
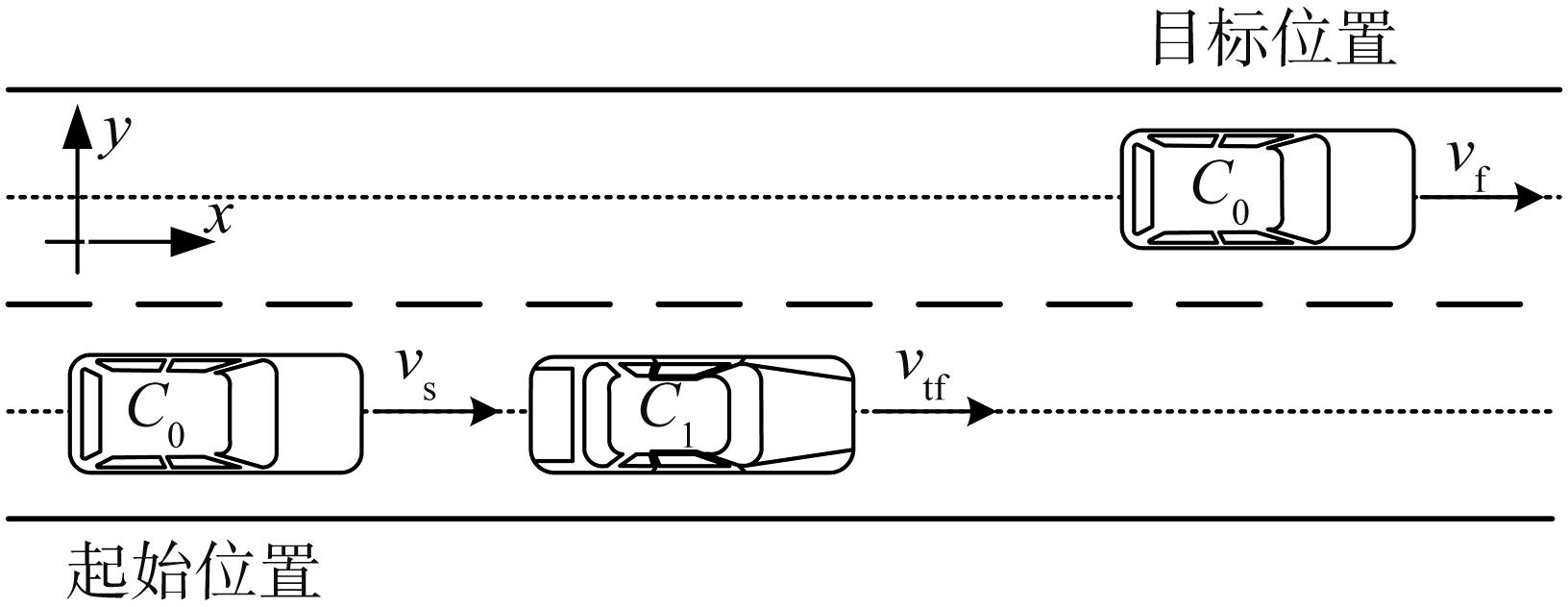
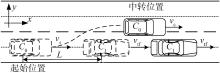
图 5
首次五次多项式轨迹规划"


图 6
双五次多项式轨迹规划"
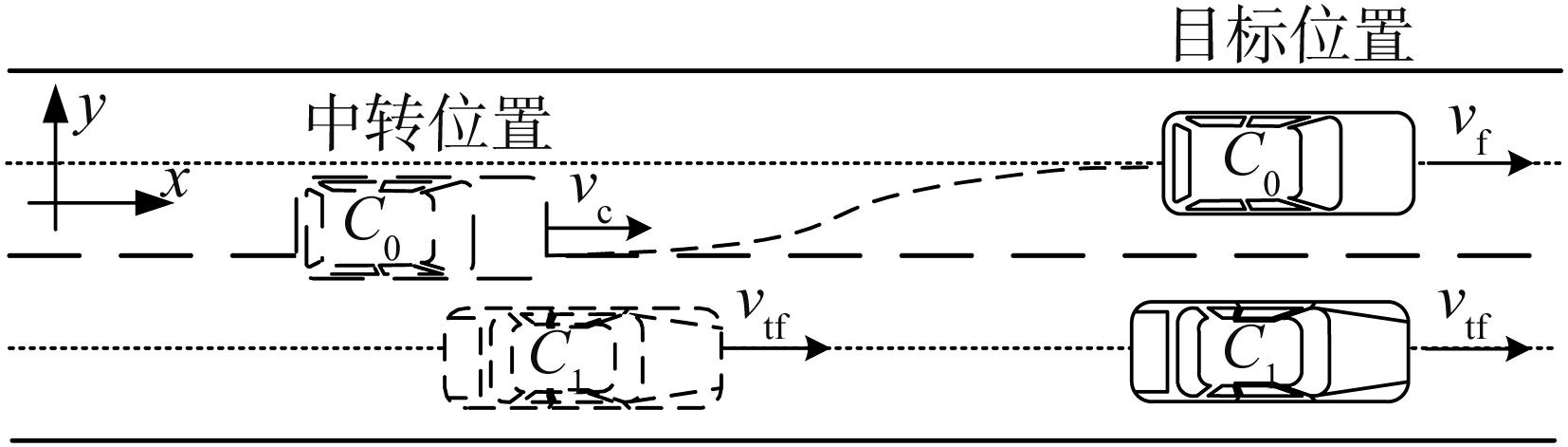
图 7
避障轨迹规划流程图"
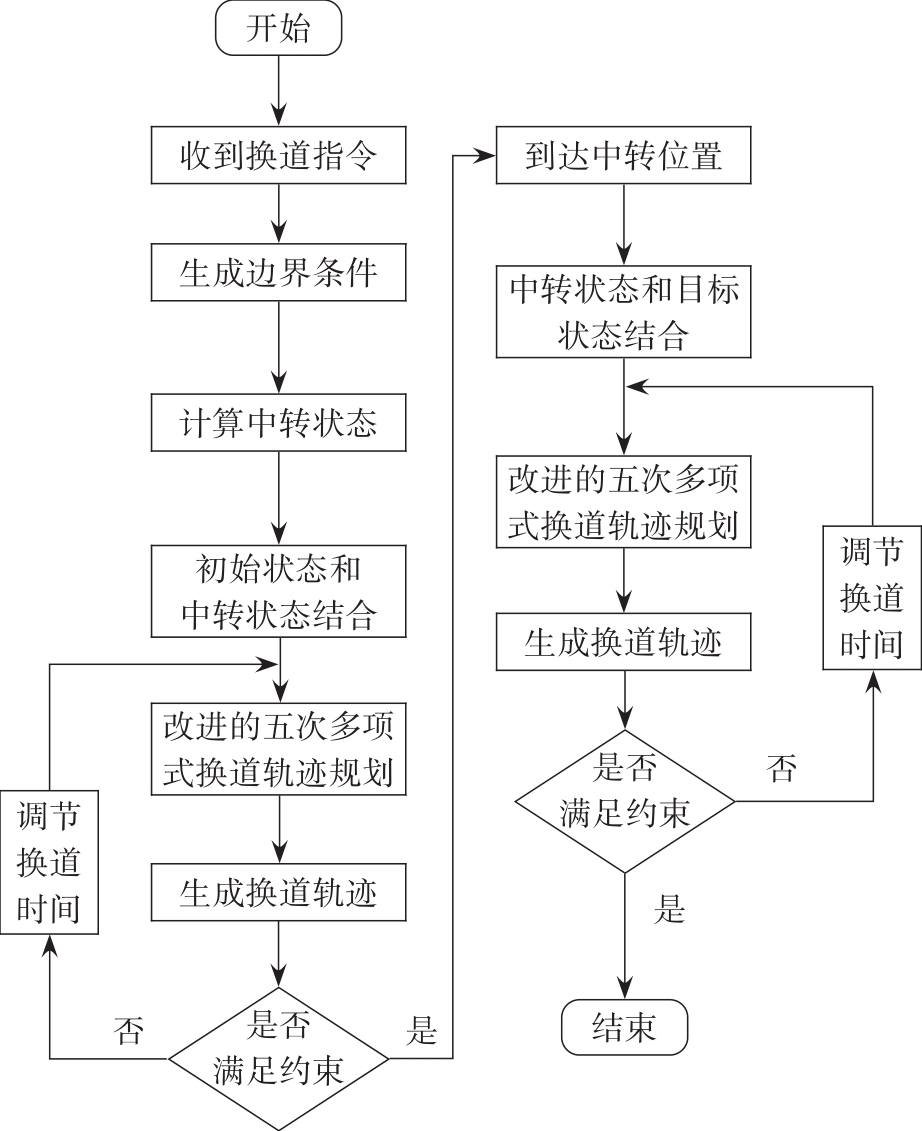
表 1
换道相关参数"
| 参数 | 数值 |
|---|---|
| 车辆长度/m | 4.50 |
| 车辆宽度/m | 1.75 |
| 整车质量/kg | 1 270 |
| 质心到前轴距离/m | 1.30 |
| 质心到后轴距离/m | 1.60 |
| 转动惯量/(kg· | 3 610 |
| 前后轮胎滑移率 | 0.15 |
| 道路宽度/m | 3.75 |
| 换道纵向位移/m | 100 |
| 横向加速度最值/( | 2.00 |
| 纵向加速度最值/( | 2.50 |

图 8
无障碍换道轨迹参数"

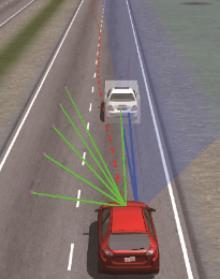
图 9
双五次换道轨迹跟踪场景图"
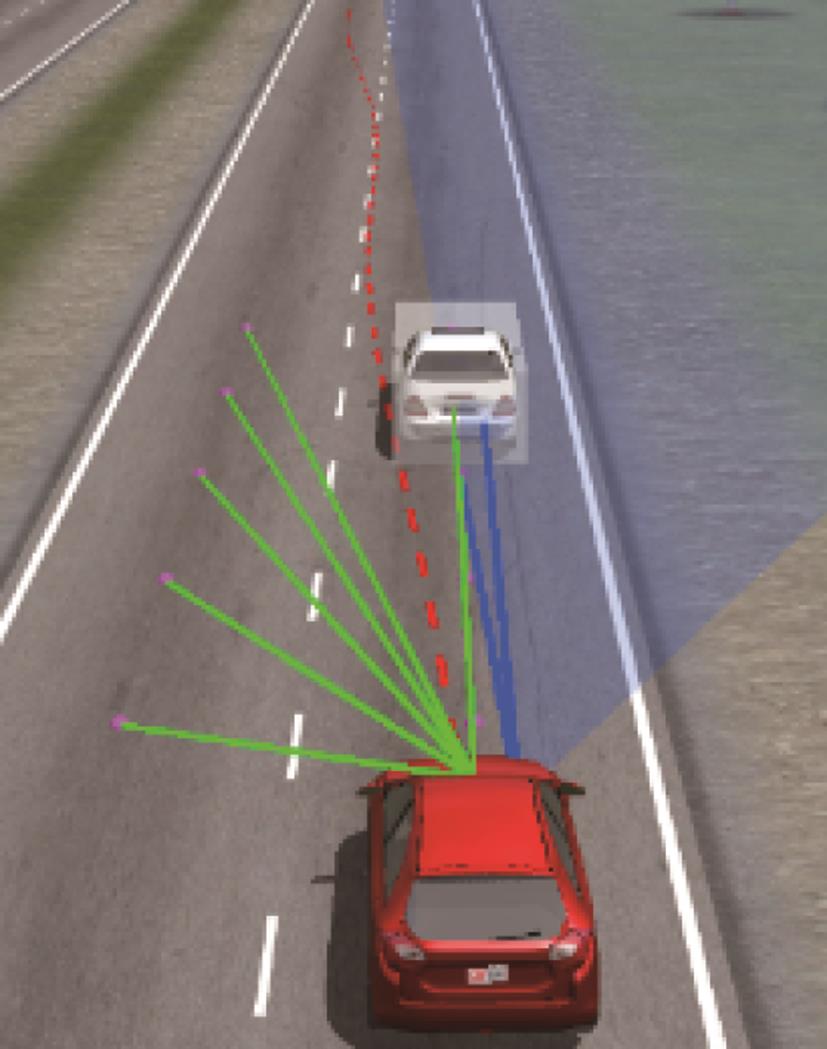

图 10
交通车变速时的换道轨迹参数"
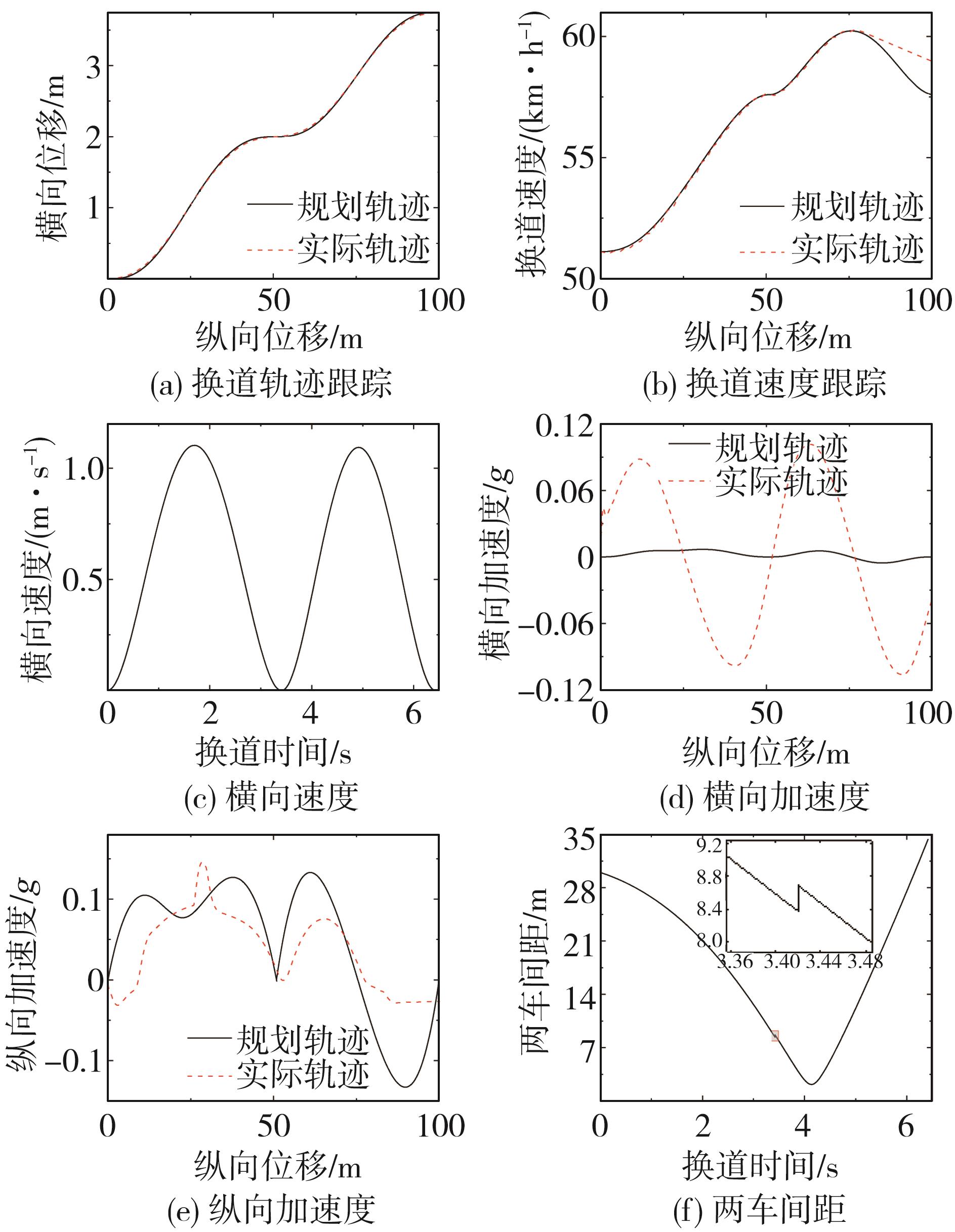

图 11
高速情况的轨迹规划"
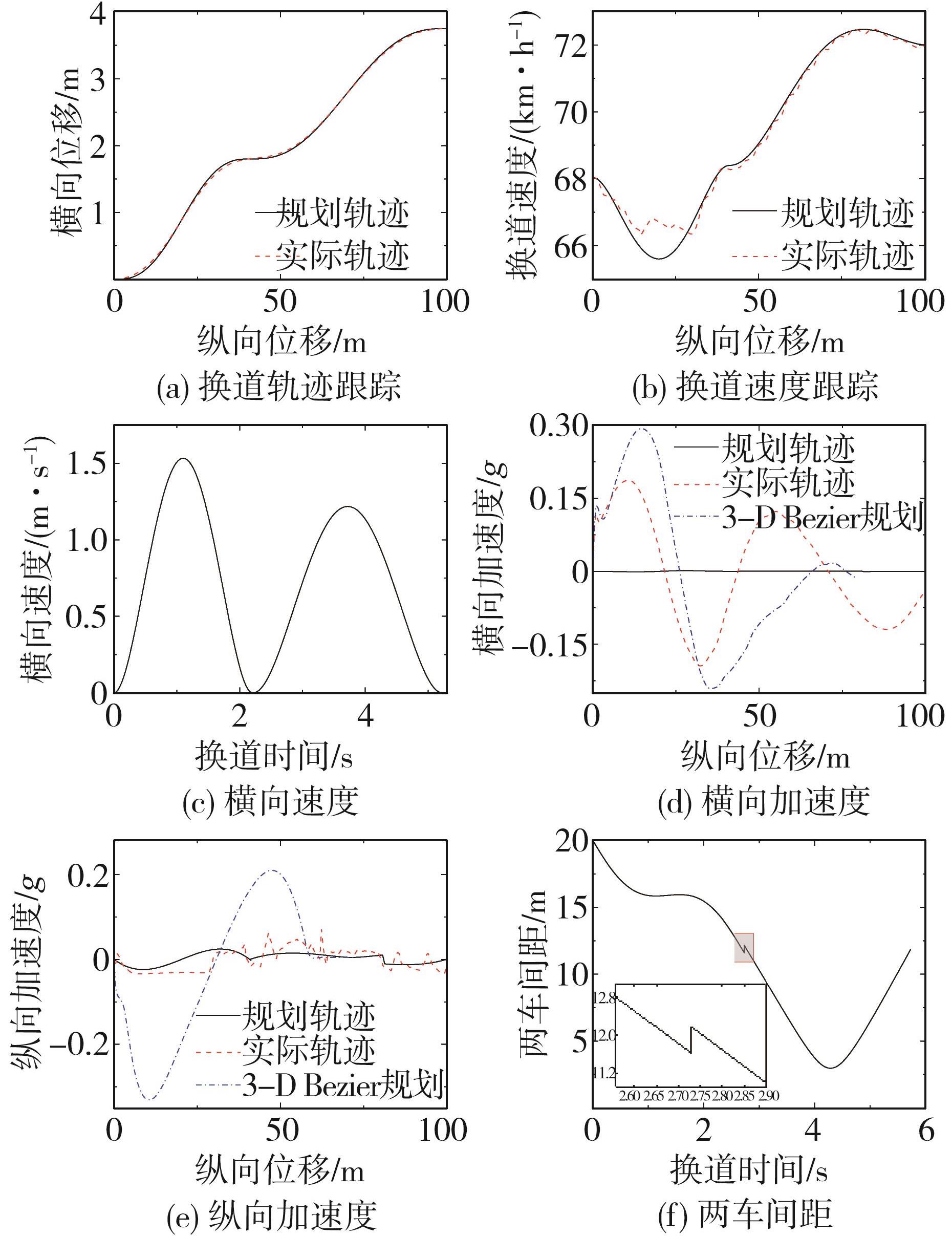

图 12
低速情况下的轨迹规划"
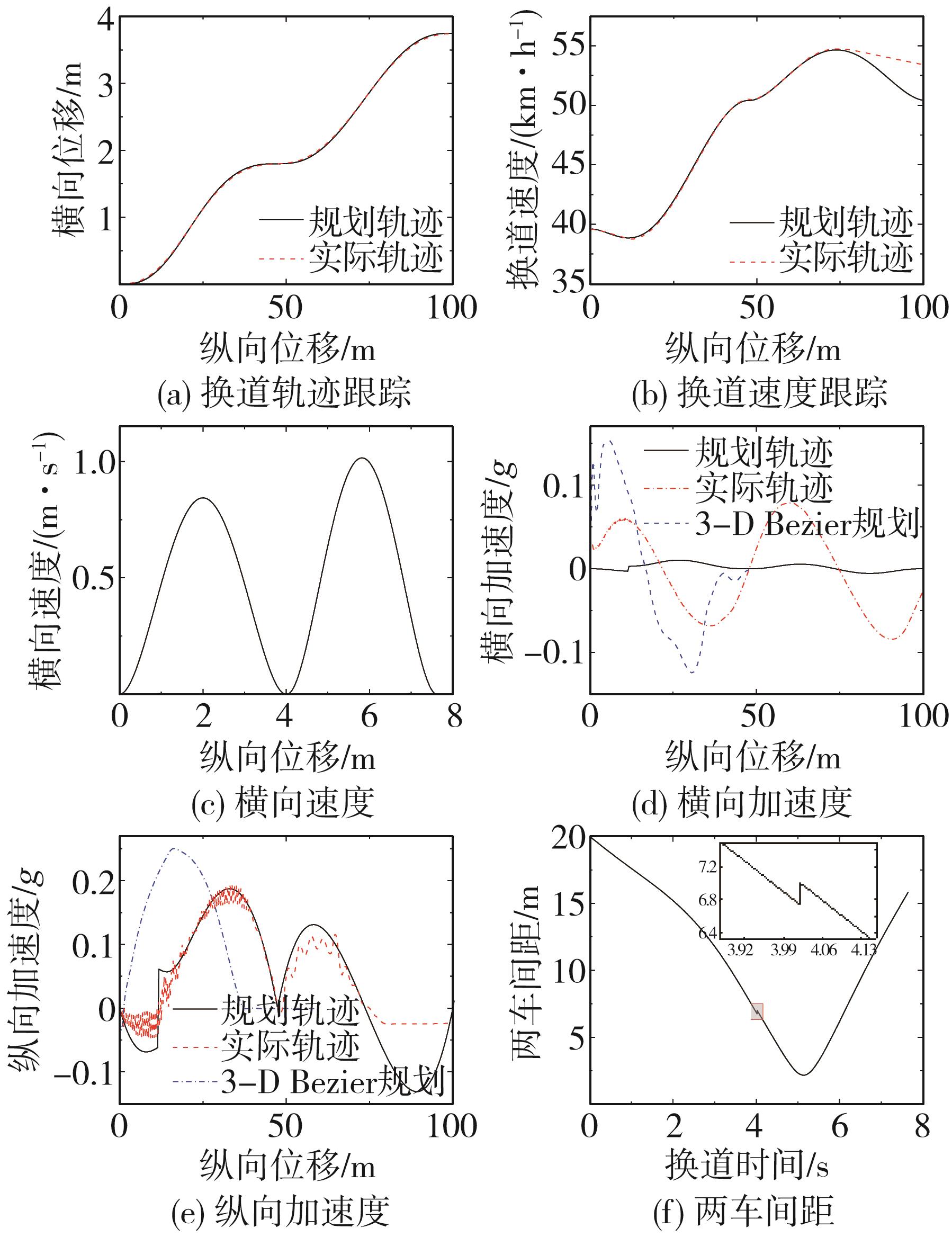
图 13
不同前车距离时的换道轨迹跟踪"

图 14
不同前车车速时的换道轨迹跟踪"
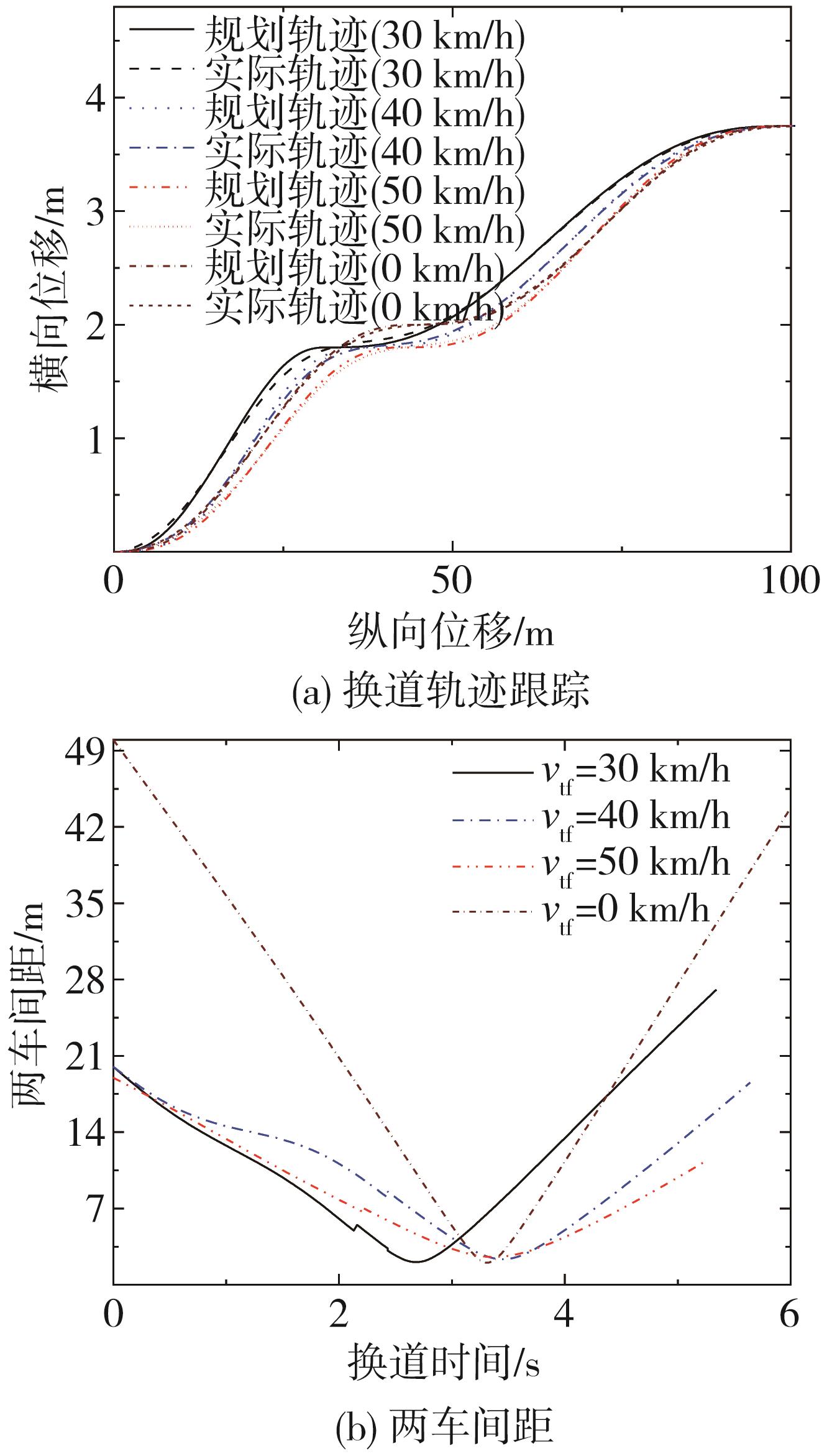

图 15
换道交通情况"


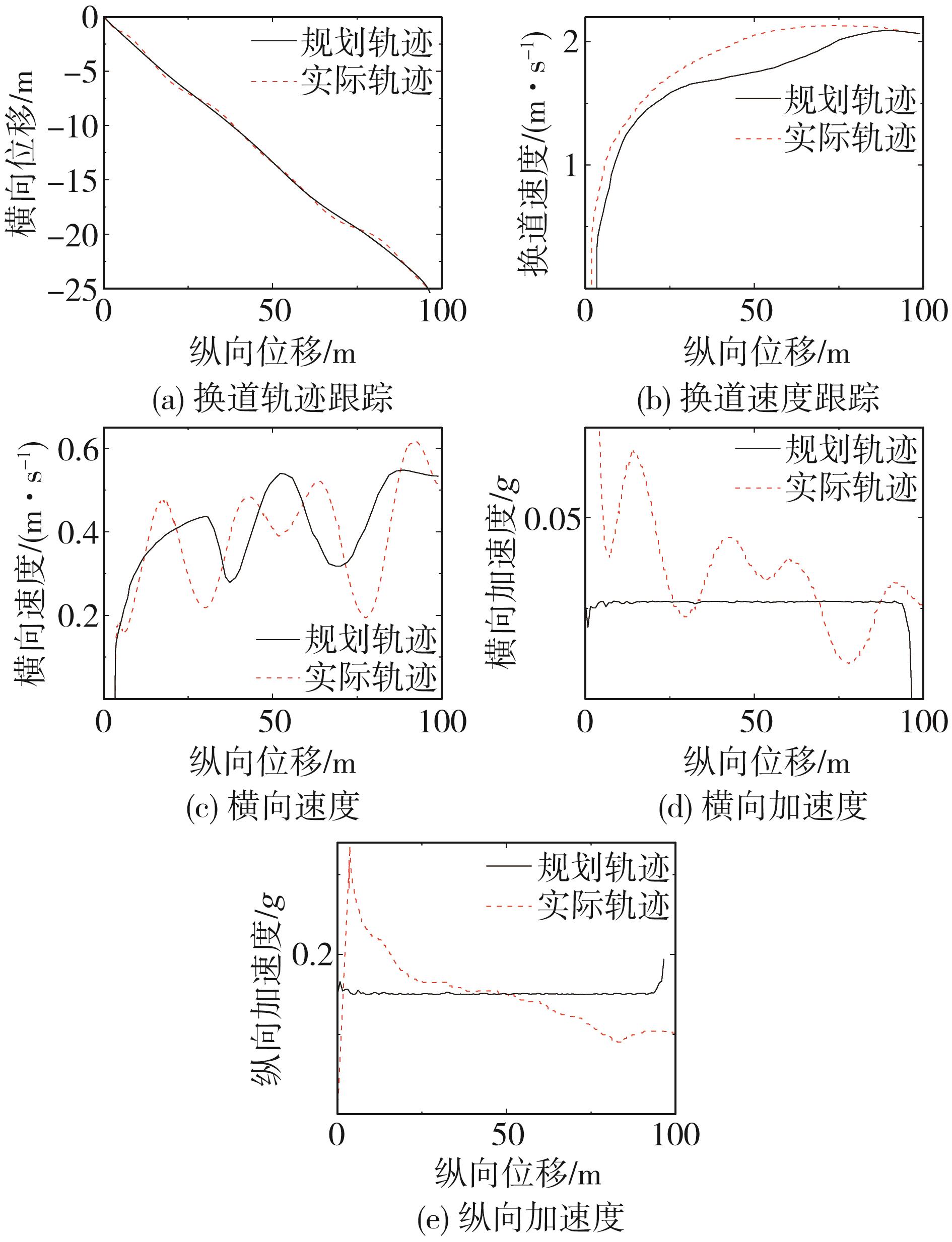
图 16
换道轨迹跟踪"
| 1 | ZHU C, ZHONG S, MA S, et al. Two⁃lane lattice hydrodynamic model considering the empirical lane⁃changing rate [J]. Communications in Nonlinear Science and Numerical Simulation ,2019,73(7):229-243. |
| 2 | MEHMOOD A, LIAQUAT M, BHATTI A I, et al. Trajectory planning and control for lane⁃change of autonomous vehicle [C]. 2019 5th International Conference on Control, Automation and Robotics (ICCAR) ,2019:331-335. |
| 3 | PANOV A I, YAKOVLEV K S, SUVOROV R. Grid path planning with deep reinforcement learning: preliminary results [J]. Procedia Computer Science,2018,123:347-353. |
| 4 | 曹昊天,宋晓琳,黄江.基于弹性绳理论的自主车辆防碰撞的路径规划 [J] . 汽车工程,2014,36(10):1230-1236. |
| CAO H T,SONG X L,HUANG J. Path planning of autonomous vehicle for collision avoidance based on elastoplast theory [J].Automotive Engineering ,2014,36(10):1230-1236. | |
| 5 | CHOI Y, LIM K, KIM J, et al. Lane change and path planning of autonomous vehicles using GIS [C]. International Conference on Ubiquitous Robots & Ambient Intelligence. IEEE,2015:163-166. |
| 6 | 王威,陈慧岩,马建昊,等.基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪 [J].兵工学报,2019,40(11):2336-2351. |
| WANG W, CHEN H Y, MA J H, et al. Intelligent vehicle path tracking based on Frenet coordinate system and control delay compensation [J]. Acta Armamentarii ,2019,40(11):2336-2351. | |
| 7 | BU X, SU H, ZOU W, et al. Curvature continuous path smoothing based on cubic Bezier curves for car⁃like vehicles [C]. International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, 2015: 1453-1458. |
| 8 | TAKAHASHI A , HONGO T , NINOMIYA Y , et al. Local path planning and motion control for agv in positioning [C]. Intelligent Robots and Systems, 1989: 392-397. |
| 9 | PENG T, SU L, ZHANG R, et al. A new safe lane⁃change trajectory model and collision avoidance control method for automatic driving vehicles [J]. Expert Systems with Applications, 2019, 141:112953. |
| 10 | HUANG Y , WANG H , KHAJEPOUR A , et al. A novel local motion planning framework for autonomous vehicles based on resistance network and model predictive control [J]. IEEE Transactions on Vehicular Technology, 2020, 69(1):55-66. |
| 11 | LI T, WU J, CHAN C, et al. A cooperative lane change model for connected and automated vehicles [J]. IEEE Access, 2020,8:54940-54951. |
| 12 | ZHOU J, ZHENG H, WANG J, et al. Multi⁃objective optimization of lane⁃changing strategy for intelligent vehicles in complex driving environments [J]. IEEE Transactions on Vehicular Technology, 2020,69(2):1291-1308. |
| 13 | SONG X, CAO H, HUANG J. Vehicle path planning in various driving situations based on the elastic band theory for highway collision avoidance [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013,227(12):1706-1722. |
| 14 | WU C S, CHIU Z Y, LIU J S. Simulations for time⁃optimal trajectory planning along parametric polynomial lane⁃change curves for a unicycle [C]. 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2017: 2173-2178. |
| 15 | SHIM T, ADIREDDY G, YUAN H. Autonomous vehicle collision avoidance system using path planning and model⁃predictive⁃control⁃based active front steering and wheel torque control [J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2012,226(6):767-778. |
| 16 | 孙扬. 无人驾驶车辆智能水平的定量评价[D].北京:北京理工大学,2014. |
| SUN Y. Quantitative evaluation of the level of intelligent driverless vehicles [D].Beijing: Beijing Institute of Technology,2014. | |
| 17 | 李玮,王晶,段建民.基于多项式的智能车辆换道轨迹规划[J].计算机工程与应用,2012,48(3):242-245. |
| LI W,WANG J,DUAN J M. Lane changing trajectory planning of intelligent vehicles based on polynomials [J]. Computer Enginee⁃ring and Applications,2012,48(3):242-245. | |
| 18 | CHEN L, QIN D, XU X, et al. A path and velocity planning method for lane changing collision avoidance of intelligent vehicle based on cubic 3⁃D Bezier curve [J]. Advances in Engineering Software, 2019,132(6):65-73. |
| 19 | 游峰,谷广.面向无人驾驶的车辆协同换道轨迹规划[J].科学技术与工程,2018,18(15):155-161. |
| YOU F, GU G. Coordinated lane⁃changing trajectory planning for driverless vehicles [J]. Science and Technology and Engineering, 2018,18(15):155-161. | |
| 20 | HASSANZADEH M, LIDBERG M R, KESHAVARZ M, et al. Path and speed control of a heavy vehicle for collision avoidance manoeuvres [C]. Intelligent Vehicles Symposium. IEEE,2012:129-134. |
| 21 | 中华人民共和国标准. 人体全身振动暴露的舒适性降低界限和评价准则:[S]. 北京:中国质检出版社, 2007. |
| Standards of the People’s Republic of China. Mechanical vibration and shock⁃Evaluation of human exposure to whole⁃body vibration:[S]. Beijing : China Quality Inspection Press, 2007. | |
| 22 | 叶柏年.点的加加速度[J].力学与实践,1988(5):51-53. |
| YE B N. Acceleration of points [J]. Physics and Engineering, 1988(5): 51-53. |
| [1] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [2] | 郝建平,苏炎召,钟志华,黄晋. 面向智能汽车的SOA架构及服务调度机制研究[J]. 汽车工程, 2023, 45(9): 1563-1572. |
| [3] | 赵高士,陈龙,蔡英凤,廉玉波,王海,刘擎超,滕成龙. 融合复杂网络和记忆增强网络的轨迹预测技术[J]. 汽车工程, 2023, 45(9): 1608-1616. |
| [4] | 梅润,褚端峰,高博麟,李克强,丛炜,陈超义. 基于云控系统的队列预测性巡航与换道决策[J]. 汽车工程, 2023, 45(8): 1299-1308. |
| [5] | 胡启慧,蔡英凤,王海,陈龙,董钊志,刘擎超. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| [6] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [7] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [8] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [9] | 钱立军,陈晨,陈健. 无信控交叉口环境下考虑驾驶员误差的集中式轨迹规划[J]. 汽车工程, 2023, 45(5): 768-776. |
| [10] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [11] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [12] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [13] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [14] | 李琴,汤建明,张博远,陈勇,王勇. 分布式驱动电动汽车多执行器容错控制研究[J]. 汽车工程, 2023, 45(12): 2251-2259. |
| [15] | 张洪昌,宁鹏,杨杰,宋建伟,郝麟,曾娟. 基于双层求解策略的平行泊车轨迹规划[J]. 汽车工程, 2023, 45(12): 2299-2309. |
|