汽车工程 ›› 2023, Vol. 45 ›› Issue (12): 2251-2259.doi: 10.19562/j.chinasae.qcgc.2023.12.007
所属专题: 新能源汽车技术-电驱动&能量管理2023年
李琴1,汤建明1,张博远1,陈勇1,王勇2( )
)
Qin Li1,Jianming Tang1,Boyuan Zhang1,Yong Chen1,Yong Wang2()
摘要:
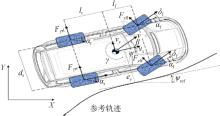
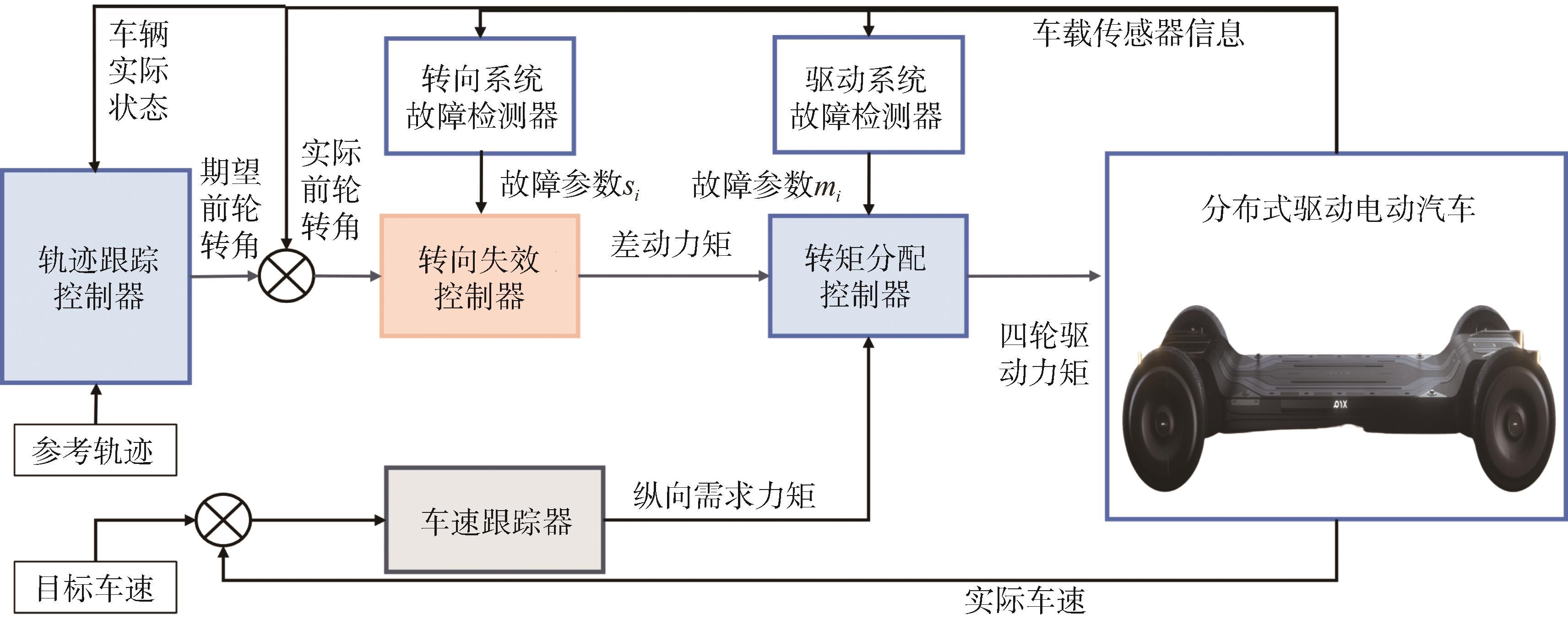
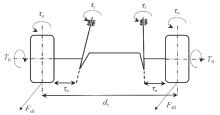
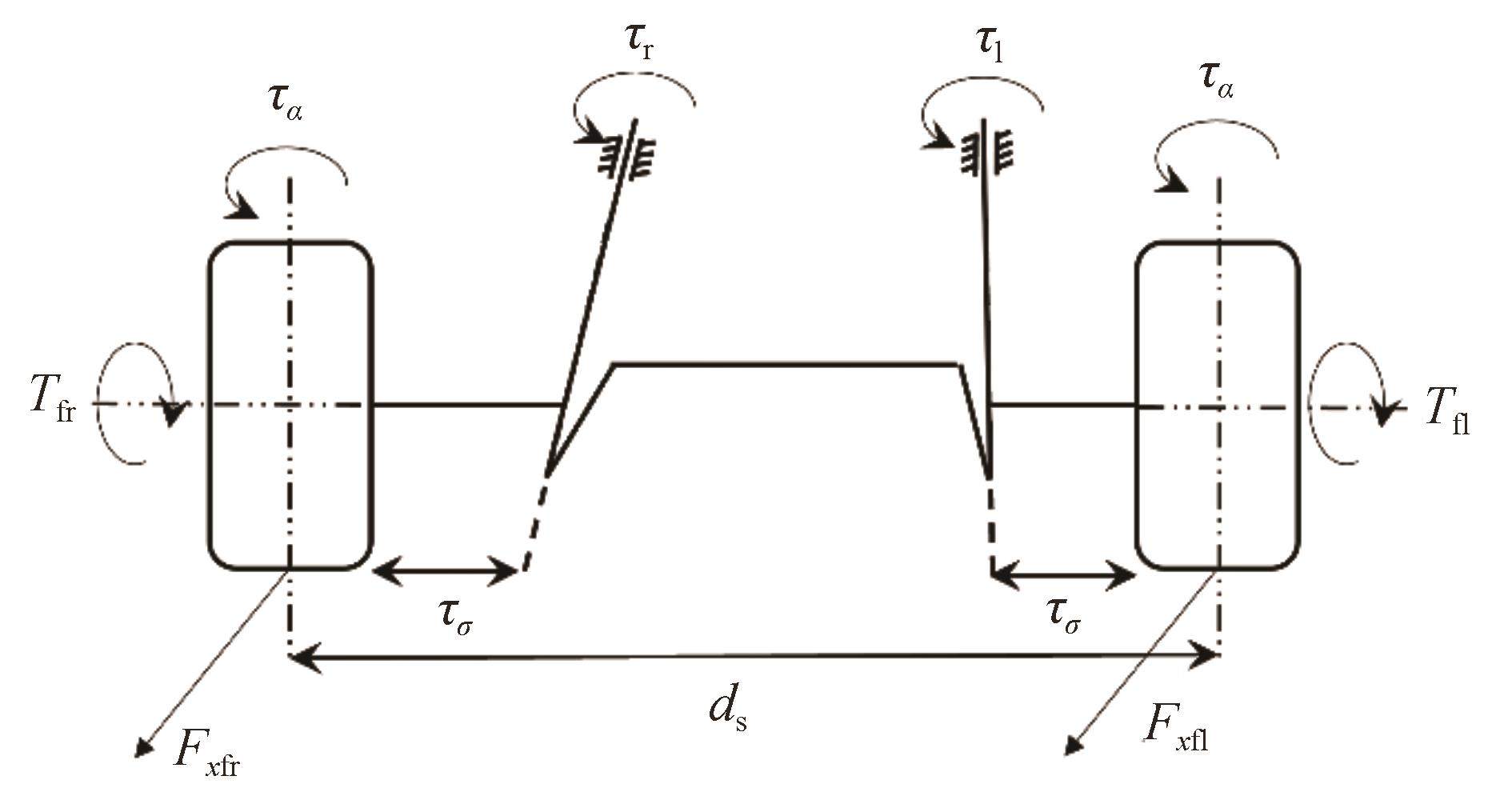
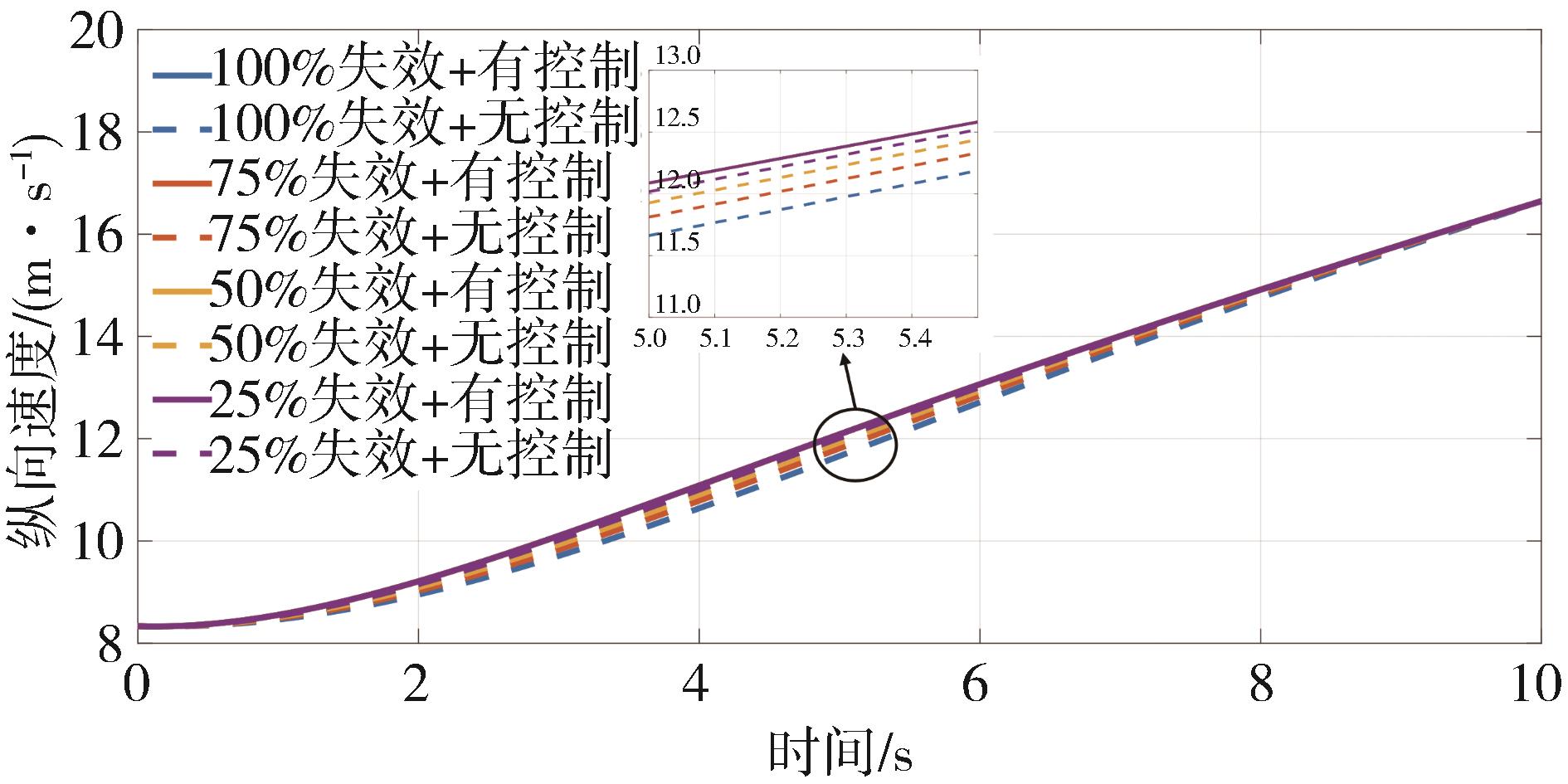
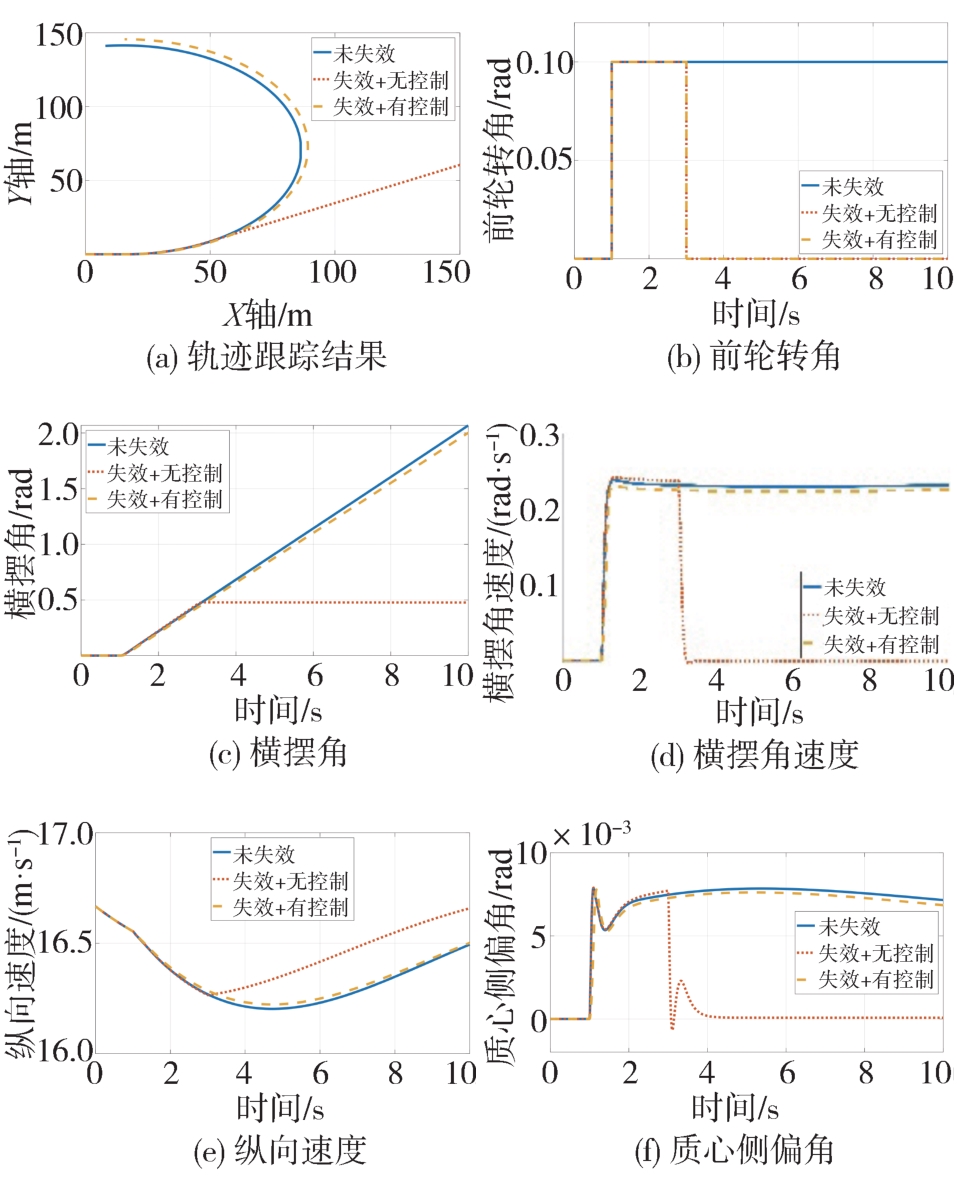
分布式驱动电动汽车的各轮轮毂电机驱动力矩独立可控,是一个典型的过驱动系统。通过优化各轮驱动力矩分配,可以实现容错控制。本文中以分布式驱动电动汽车为研究对象,针对线控转向系统和轮毂电机多执行器同时失效的轨迹跟踪问题,提出了一种基于差动转向和驱动转矩分配的容错控制方法。该方法采用分层式架构:上层控制器通过模型预测控制方法得到前轮转角,并在转向系统执行器失效时,通过滑模控制方法计算差动转向力矩;下层控制器结合故障诊断信息,基于二次规划算法求解存在驱动电机失效情况的转矩优化分配策略。最后,进行了单执行器失效及多执行器同时失效的仿真实验,结果验证了该容错控制方法的有效性。