汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1494-1502.doi: 10.19562/j.chinasae.qcgc.2022.10.003
所属专题: 智能网联汽车技术专题-规划&控制2022年
王宏伟( ),刘晨宇,李磊,张昊天
),刘晨宇,李磊,张昊天
收稿日期:2022-04-10
修回日期:2022-05-14
出版日期:2022-10-25
发布日期:2022-10-21
通讯作者:
王宏伟
E-mail:wanghw0819@163.com
基金资助:
Hongwei Wang(),Chenyu Liu,Lei Li,Haotian Zhang
Received:2022-04-10
Revised:2022-05-14
Online:2022-10-25
Published:2022-10-21
Contact:
Hongwei Wang
E-mail:wanghw0819@163.com
摘要:
本文针对无人车在复杂工况下,非线性程度增加和动力学约束导致的轨迹跟踪控制精度差和求解效率低的问题,提出一种高效的非线性模型预测控制(nonlinear model predictive control, NMPC)算法。首先考虑车辆模型的非线性因素,建立动力学和魔术轮胎模型,并将无人车终端状态整合到性能指标中,添加稳定性范围内多约束条件,通过障碍罚函数法处理非线性不等式约束,保证了求解过程的平滑性。然后为减轻求解非线性优化问题带来的计算负担,提出了一种新颖的连续/广义最小残差算法(improved continuation/generalized minimal residual,improved-C/GMRES),与传统的C/GMRES算法相比,通过引入连续增加的惩罚因子加快了数值计算的求解效率,降低算法的计算负担。最后通过Simulink和CarSim的联合仿真,在双移线工况和蛇行工况条件下验证跟踪精度和求解效率,结果表明与传统的C/GMRES方法相比,所提控制方法明显提升轨迹跟踪的控制精度和改善行驶稳定性,并加快数值求解效率。
王宏伟,刘晨宇,李磊,张昊天. 基于高效NMPC算法的无人车轨迹跟踪控制研究[J]. 汽车工程, 2022, 44(10): 1494-1502.
Hongwei Wang,Chenyu Liu,Lei Li,Haotian Zhang. Research on Trajectory Tracking Control of Unmanned Vehicle Based on Efficient NMPC Algorithm[J]. Automotive Engineering, 2022, 44(10): 1494-1502.
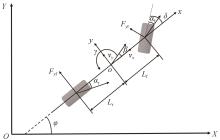
图1
2自由度动力学模型"
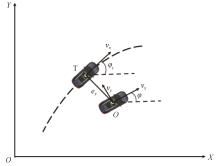
图2
轨迹跟踪示意图"
表1
C/GMRES算法"
| 步骤 | C/GMRES算法 |
|---|---|
| 步骤1 | 输入 寻找满足 |
| 步骤2 | 当 |
| 步骤3 | 当 |
表2
improved-C/GMRES算法"
| 步骤 | improved-C/GMRES算法 |
|---|---|
| 步骤1 | 输入 初始化寻找满足条件 |
| 步骤2 | 当 令 |
| 步骤3 | 设置仿真时间 |
| 步骤4 | 当 当 其他情况下, 对初始状态 |
| 步骤5 | 通过算法(1)和(2)步骤得到最优控制序列 |
表3
车辆动力学模型参数"
| 参数 | 数值 |
|---|---|
| 车身质量 | 1 560 |
| 质心到前轴的距离 | 1.156 |
| 质心到后轴的距离 | 2.035 |
| 转动惯量 | 1 536.7 |
| 轮胎模型形状因子 | 2.50 |
| 轮胎模型曲率因子 | 1.198 |
表4
控制器参数"
| 参数 | 数值 |
|---|---|
| 辨识系数 | 2.64× |
| 辨识系数 | 3.34× |
| 权重系数矩阵 | |
| 权重系数矩阵 | |
| 调整因子 | |
| 调整因子 | 3.3 |
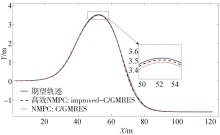
图3
轨迹跟踪曲线"
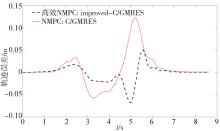
图4
轨迹误差曲线图"
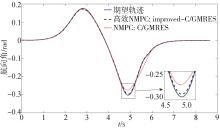
图5
航向角跟随曲线图"
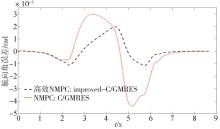
图6
航向角误差曲线图"
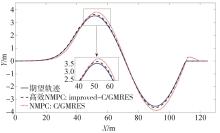
图7
轨迹跟踪曲线图"
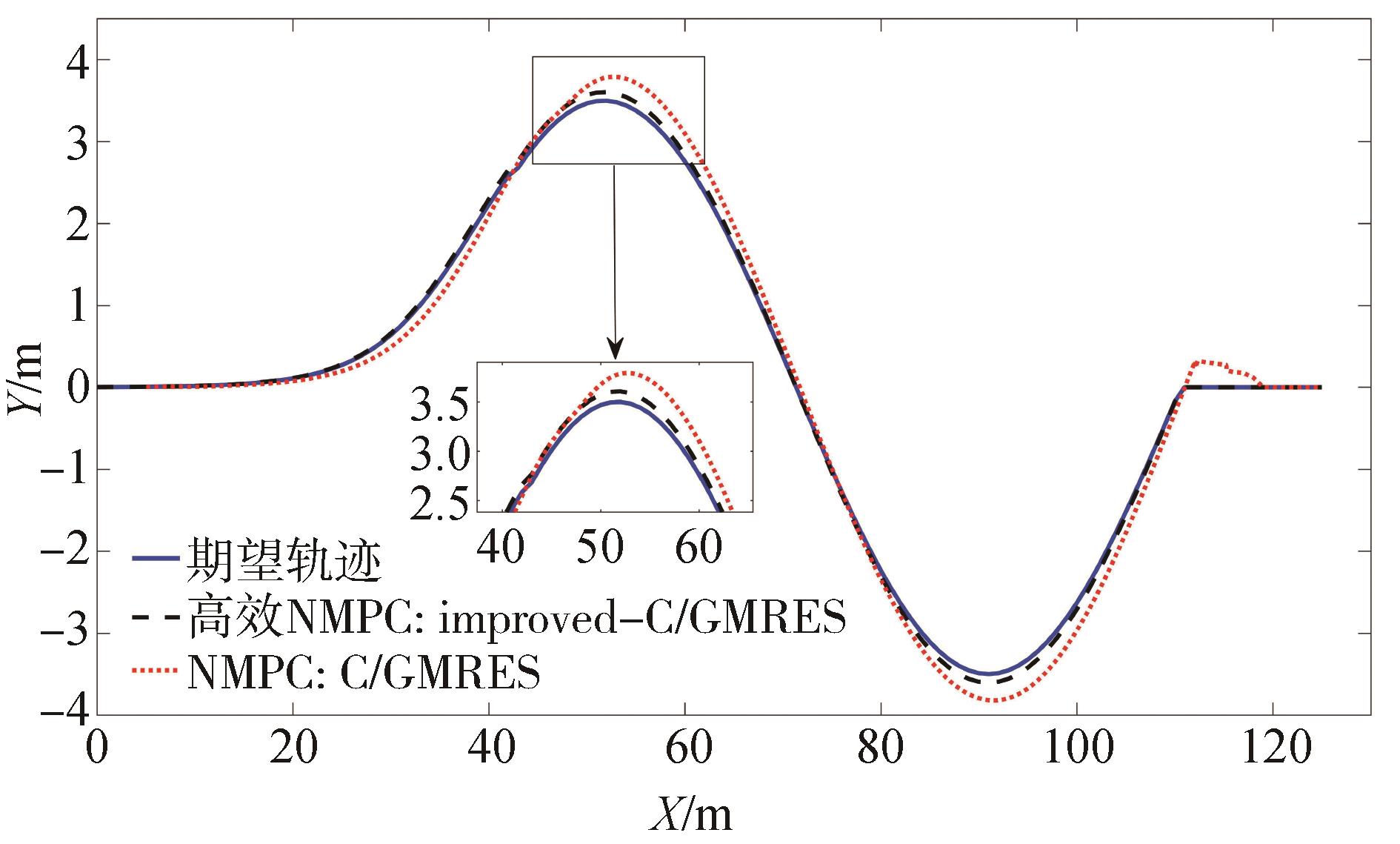
图8
轨迹误差曲线图"
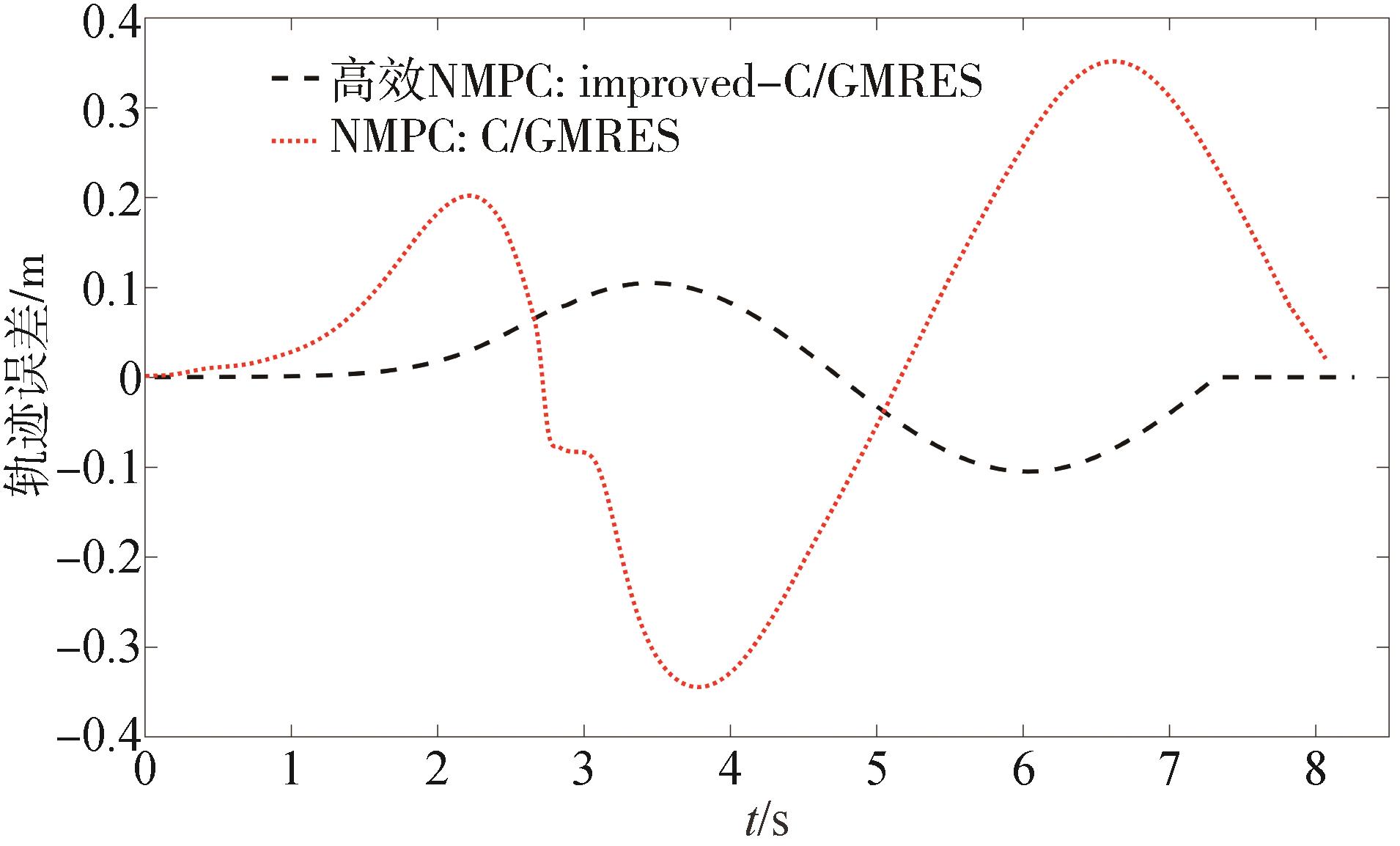
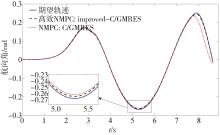
图9
航向角跟随曲线图"
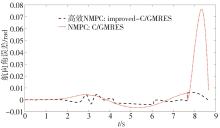
图10
航向角误差曲线图"
表5
工况1平均跟踪误差频数统计"
| 误差范围 | improved-C/GRES/次 | NMPC/次 |
|---|---|---|
| [0,0.050) | 11 | 0 |
| [0.050,0.100) | 35 | 0 |
| [0.100,0.150) | 4 | 35 |
| [0.150,0.200) | 0 | 8 |
| [0.200,0.250) | 0 | 6 |
| [0.150,0.200) | 0 | 1 |
表6
工况2平均跟踪误差频数统计"
| 误差范围 | improved-C/GRES | NMPC |
|---|---|---|
| [0,0.100) | 34 | 0 |
| [0.100,0.200) | 11 | 0 |
| [0.200,0.300) | 5 | 5 |
| [0.300,0.400) | 0 | 36 |
| [0.400,0.500) | 0 | 9 |
表7
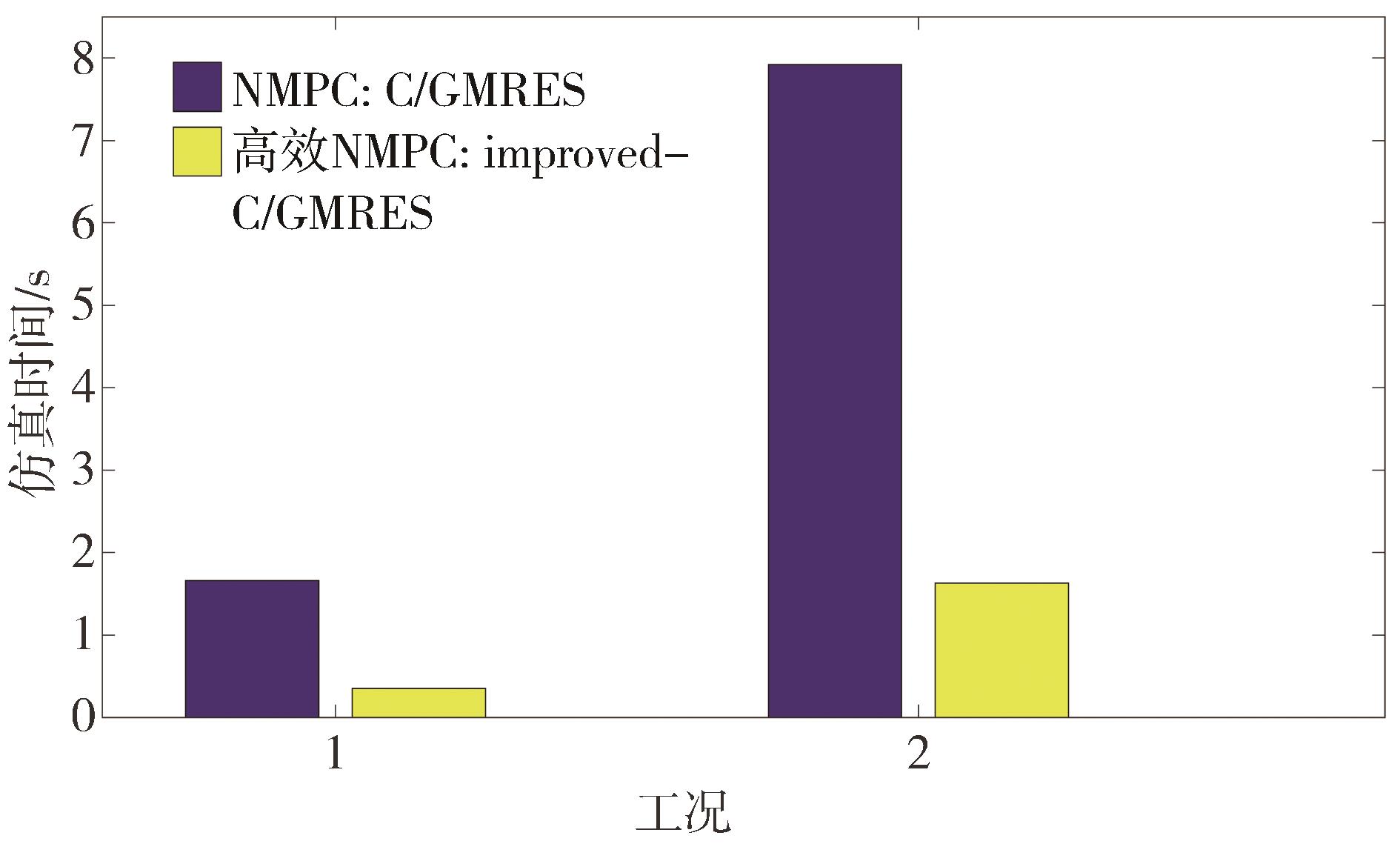
单次优化计算耗时对比表"
| 控制方法 | 仿真条件 | 平均计算时间/ms |
|---|---|---|
| improved--C/GMRES | 工况1 | 18.9 |
| GMRES | 工况1 | 116.7 |
| improved-C/GMRES | 工况2 | 25.6 |
| GMRES | 工况2 | 132.8 |
图11
仿真时间对比图"
| 1 | ZHOU X, YU X, ZHANG Y, et al. Trajectory planning and tracking strategy applied to an unmanned ground vehicle in the presence of obstacles[J]. IEEE Transactions on Automation Science and Engineering, 2021, 18(4): 1575-1589. |
| 2 | 潘世举, 李华, 苏致远, 等. 基于跟踪误差模型的智能车辆轨迹跟踪方法[J]. 汽车工程, 2019, 41(9): 1021-1027. |
| PAN S J, LI H, SUN Z Y, et al. Trajeclory tracking method for intelligent vehicles based on tracking-error model[J]. Aulomotive Engineering, 2019, 41(9): 1021-1027. | |
| 3 | CHEN T, CHEN L, XU X, et al. Simultaneous path following and lateral stability control of 4WD-4WS autonomous electric vehicles with actuator saturation[J]. Advances in Engineering Software, 2019, 128: 46-54. |
| 4 | LIU W, WANG R, XIE C, et al. Investigation on adaptive preview distance path tracking control with directional error compensation[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2020, 234(4): 484-500. |
| 5 | CHATZIKOMIS C, SORNIOTTI A, GRUBER P, et al. Comparison of path tracking and torque-vectoring controllers for autonomous electric vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(4): 559-570. |
| 6 | WU X, ZHOU B, WEN G, et al. Intervention criterion and control research for active front steering with consideration of road adhesion[J]. Vehicle system dynamics, 2018, 56(4): 553-578. |
| 7 | 李斯旭, 徐彪, 胡满江, 等. 基于动力学模型预测控制的铰接车辆多点预瞄路径跟踪方法[J]. 汽车工程, 2021, 43(8): 1187-1194. |
| LI S X, XU B, HU M J, et al. A dynamic model predictive control approach for multipoint preview path tracking of articulated vehicles [J]. Aulomotive Engineering, 2021, 43(8): 1187-1194. | |
| 8 | CHEN L, LIU M, SHI Y, et al. Adaptive fault estimation for unmanned surface vessels with a neural network observer approach[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2021, 68(1): 416-425. |
| 9 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| 10 | SCHOLTE E, CAMPBELL M E. Robust nonlinear model predictive control with partial state information[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 636-651. |
| 11 | WAN Z, KOTHARE M V. Efficient scheduled stabilizing model predictive control for constrained nonlinear systems[J]. International Journal of Robust and Nonlinear Control: IFAC‐Affiliated Journal, 2003, 13(3‐4): 331-346. |
| 12 | ARIENS D, HOUSKA B, FERREAU H, et al. Acado for matlab user’s manual[J]. Optimization in Engineering Center (OPTEC), 2010, 1. |
| 13 | ZANON M, FRASCH J V, VUKOV M, et al. Model predictive control of autonomous vehicles[M]. Optimization and optimal control in automotive systems. Springer, Cham, 2014: 41-57. |
| 14 | DU X, HTET K K K, TAN K K. Development of a genetic-algorithm-based nonlinear model predictive control scheme on velocity and steering of autonomous vehicles[J]. IEEE Transactions on Industrial Electronics, 2016, 63(11): 6970-6977. |
| 15 | ZHANG Y, KHAJEPOUR A, HASHEMI E, et al. Reconfigurable model predictive control for articulated vehicle stability with experimental validation[J]. IEEE Transactions on Transportation Electrification, 2020, 6(1): 308-317. |
| 16 | GUO H, LIU F, XU F, et al. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 49(1): 2-13. |
| 17 | TAVERNINI D, METZLER M, GRUBER P, et al. Explicit nonlinear model predictive control for electric vehicle traction control[J]. IEEE Transactions on Control Systems Technology, 2018, 27(4): 1438-1451. |
| 18 | WANG Q, LIU Y, LIU H, et al. Parallel numerical continuation of periodic responses of local nonlinear systems[J]. Nonlinear Dynamics, 2020, 100(3): 2005-2026. |
| 19 | AGOUJIL S, BENTBIB A H, JBILOU K, et al. A minimal residual norm method for large-scale Sylvester matrix equations[J]. Electronic Transactions on Numerical Analysis, 2014, 43: 45-59. |
| 20 | OHTSUKA T. A continuation/GMRES method for fast computation of nonlinear receding horizon control[J]. Automatica, 2003, 40(4): 563-574. |
| 21 | GUO N, ZHANG X, ZOU Y, et al. A computationally efficient path-following control strategy of autonomous electric vehicles with yaw motion stabilization[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 728-739. |
| 22 | HU C, WANG R, YAN F, et al. Should the desired heading in path following of autonomous vehicles be the tangent direction of the desired path?[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 3084-3094. |
| 23 | BOYD S, BOYD S P, VANDENBERGHE L. Convex optimization[M]. Cambridge University Press, 2004. |
| 24 | SHEN C, BUCKHAM B, SHI Y. Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs[J]. IEEE Transactions on Control Systems Technology, 2016, 25(5): 1896-1904. |
| [1] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [2] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [3] | 李琴,汤建明,张博远,陈勇,王勇. 分布式驱动电动汽车多执行器容错控制研究[J]. 汽车工程, 2023, 45(12): 2251-2259. |
| [4] | 赵越,胡纪滨,吴维,魏超. 无人车全轮蟹行转向稳定性鲁棒控制与试验验证[J]. 汽车工程, 2022, 44(8): 1126-1135. |
| [5] | 李道飞,查安飞,徐彪,张家杰. 半挂汽车列车紧急避撞轨迹跟踪控制算法[J]. 汽车工程, 2022, 44(7): 1098-1106. |
| [6] | 方培俊,蔡英凤,陈龙,廉玉波,王海,钟益林,孙晓强. 基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法[J]. 汽车工程, 2022, 44(10): 1469-1483. |
| [7] | 卢少波,谢菲菲,张博涵,陆嘉峰,李彩霞. 基于非对称势场的人车协同博弈避撞[J]. 汽车工程, 2022, 44(10): 1484-1493. |
| [8] | 王海,李洋,蔡英凤,孙恺,陈龙. 基于激光雷达的3D实时车辆跟踪[J]. 汽车工程, 2021, 43(7): 1013-1021. |
| [9] | 牛国臣,李文帅,魏洪旭. 基于双五次多项式的智能汽车换道轨迹规划[J]. 汽车工程, 2021, 43(7): 978-986. |
| [10] | 张志勇,龙凯,杜荣华,黄彩霞. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| [11] | 韩立金,刘辉,刘聪,刘宝帅,张聪. 基于电池寿命预测控制的履带车辆能量管理[J]. 汽车工程, 2021, 43(5): 657-666. |
| [12] | 陈龙,邹凯,蔡英凤,滕成龙,孙晓强,王海. 基于NMPC的智能汽车纵横向综合轨迹跟踪控制[J]. 汽车工程, 2021, 43(2): 153-161. |
| [13] | 张雨甜,李斐然,田汉青,胡纪滨,魏超,吴维. 无人车辆底盘集成动力学系统解耦控制研究[J]. 汽车工程, 2021, 43(11): 1673-1682. |
| [14] | 陈龙, 解云鹏, 蔡英凤, 孙晓强, 滕成龙, 邹凯. 极限工况下无人驾驶车辆稳定跟踪控制*[J]. 汽车工程, 2020, 42(8): 1016-1026. |
| [15] | 张雷, 赵宪华, 王震坡. 四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究*[J]. 汽车工程, 2020, 42(11): 1513-1521. |
|