汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 1013-1021.doi: 10.19562/j.chinasae.qcgc.2021.07.008
王海1,李洋1,蔡英凤2( ),孙恺3,陈龙2
),孙恺3,陈龙2
Hai Wang1,Yang Li1,Yingfeng Cai2(),Kai Sun3,Long Chen2
摘要:
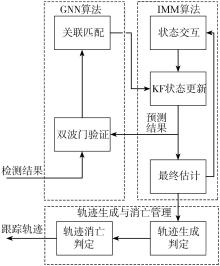
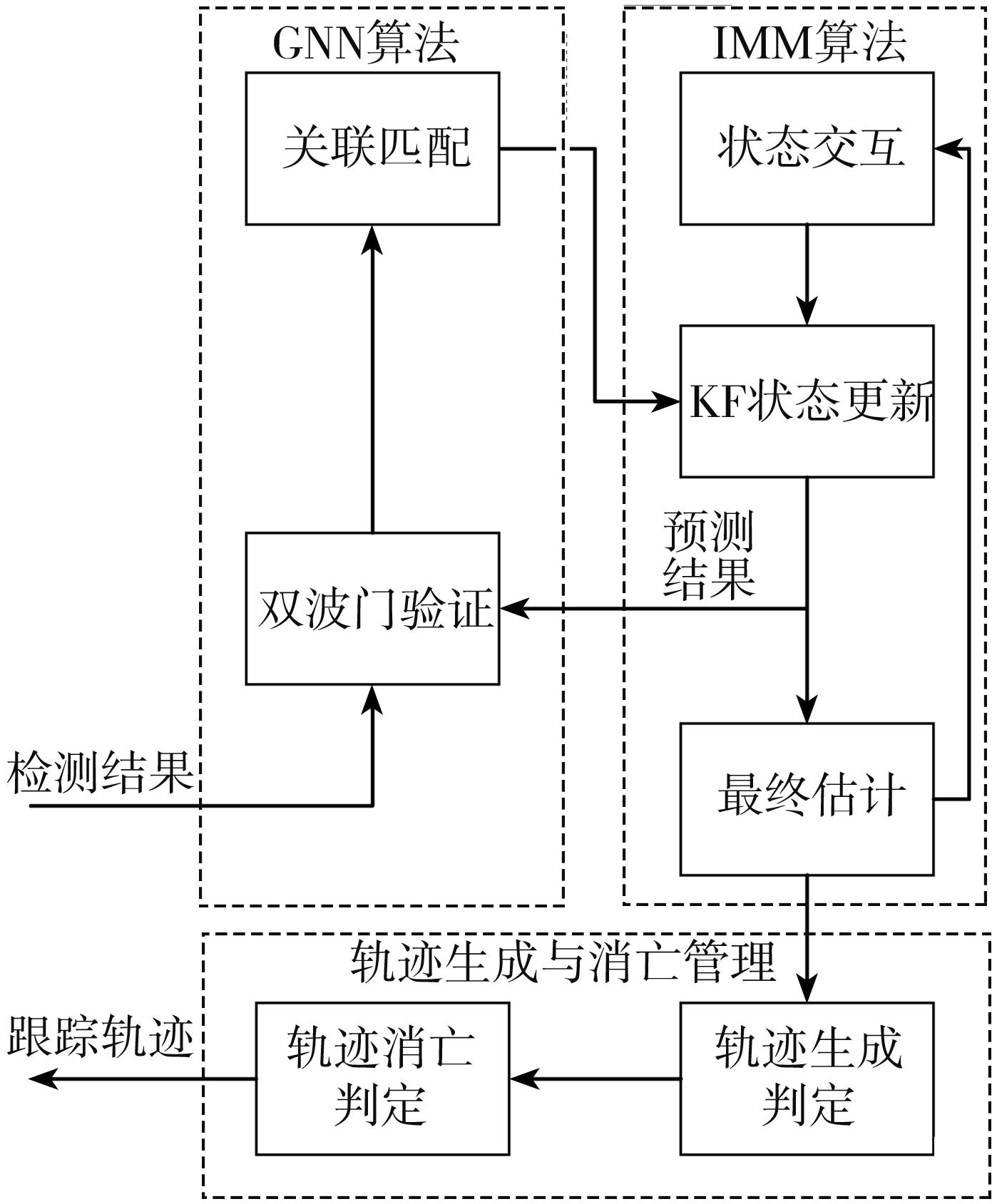
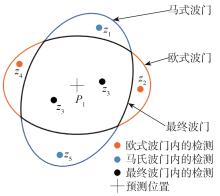
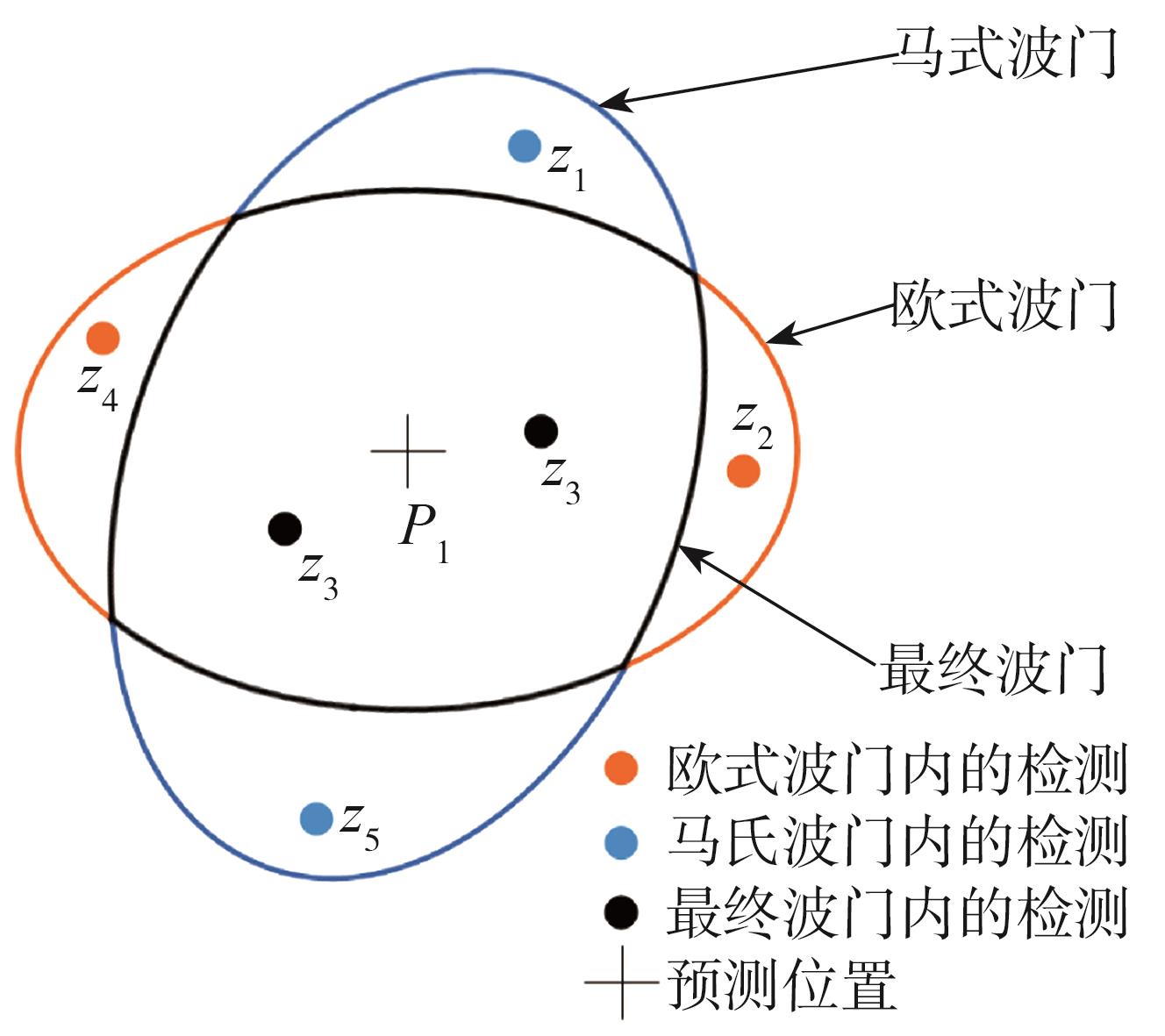
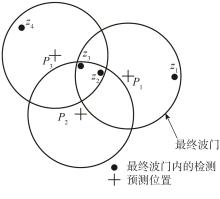
3D多目标跟踪算法是智能车辆感知算法的重要组成部分,现有跟踪算法多与检测算法耦合以提高精度,导致算法实时性不足。针对此问题,本文中提出一种基于激光雷达的3D实时车辆跟踪算法。首先,对于激光雷达检测结果杂波较少的工况,提出结构精简的双波门GNN关联算法,有效提升其关联速度及精度;其次,优化关联向量与关联距离,既保证了算法的普适性,又提升其跟踪精度;最后,针对3D目标运动情况使用3D IMM?KF算法解决了3D机动目标的跟踪问题。基于公开数据集KITTI,本文算法在获得266.1 FPS跟踪速度的前提下可实现81.55%的MOTA精度;基于自研无人车平台进行面对遮挡工况的验证,结果表明本算法具有良好的目标跟踪及关联性能。