汽车工程 ›› 2021, Vol. 43 ›› Issue (8): 1228-1237.doi: 10.19562/j.chinasae.qcgc.2021.08.015
张晓龙1,江昆1,孙恺2,刘茂林1,邵振雷2,肖鹏川2,杨殿阁1( )
)
收稿日期:2021-02-25
修回日期:2021-04-24
出版日期:2021-08-25
发布日期:2021-08-20
通讯作者:
杨殿阁
E-mail:ydg@mail.tsinghua.edu.cn
基金资助:
Xiaolong Zhang1,Kun Jiang1,Kai Sun2,Maolin Liu1,Zhenlei Shao2,Pengchuan Xiao2,Diange Yang1()
Received:2021-02-25
Revised:2021-04-24
Online:2021-08-25
Published:2021-08-20
Contact:
Diange Yang
E-mail:ydg@mail.tsinghua.edu.cn
摘要:
本文中建立了一种针对机械式激光雷达参数较少的内参模型;考虑到偏心结构对于点云的影响,提出了角度修正和距离修正两种点云修正方法,对两种方法的修正效果进行仿真,并通过实际点云加以验证。最后还用位姿估计算法验证修正算法的有效性。
张晓龙,江昆,孙恺,刘茂林,邵振雷,肖鹏川,杨殿阁. 激光雷达的内参建模与点云修正方法[J]. 汽车工程, 2021, 43(8): 1228-1237.
Xiaolong Zhang,Kun Jiang,Kai Sun,Maolin Liu,Zhenlei Shao,Pengchuan Xiao,Diange Yang. Intrinsic Parameters Modeling for LiDAR and Point Cloud Correction Method[J]. Automotive Engineering, 2021, 43(8): 1228-1237.

图1
球坐标系示意图"
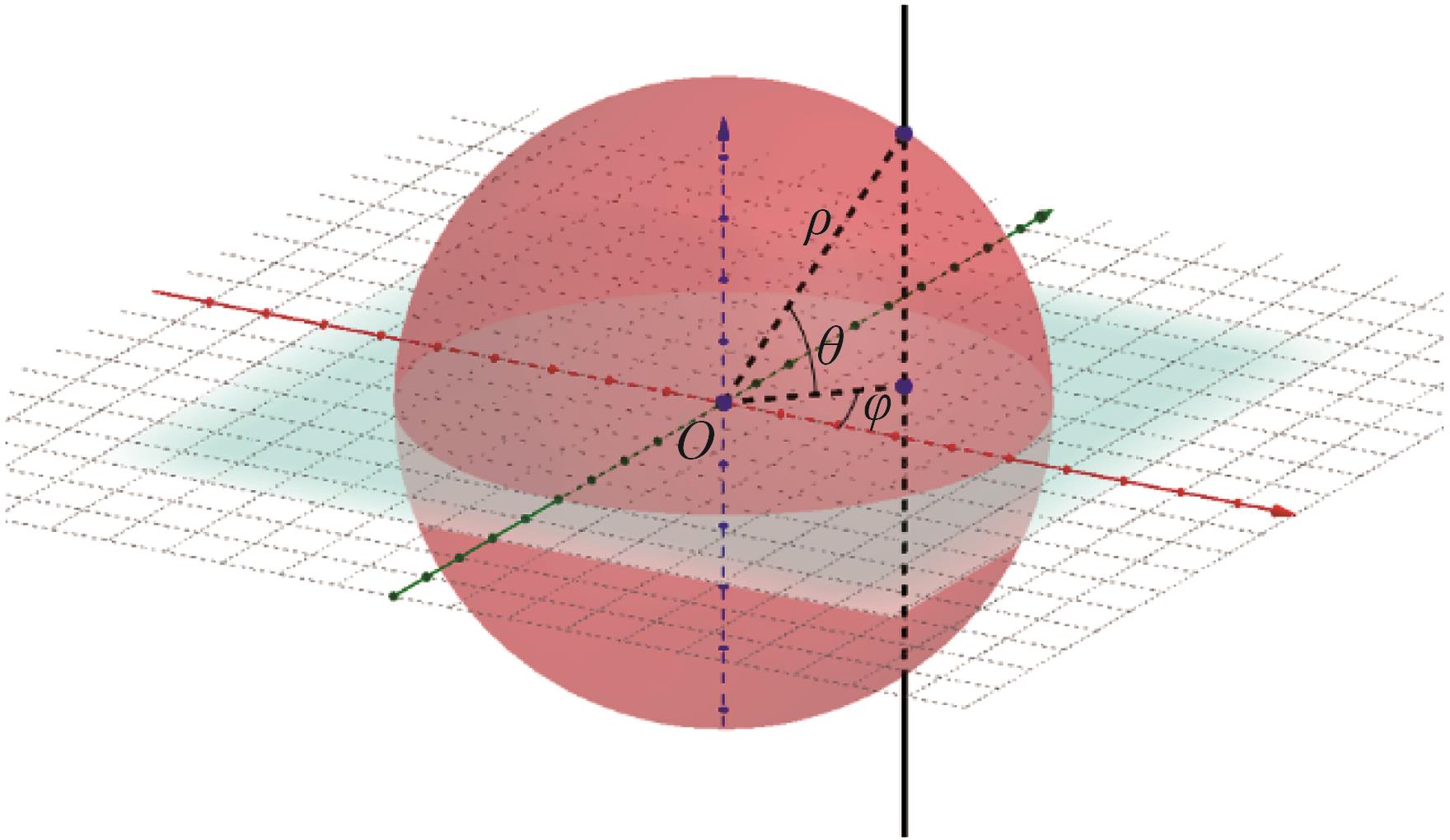
表1
内参建模方法整理"
| 时间 | 作者 | ||||||
|---|---|---|---|---|---|---|---|
| 2010 | Pandey[ | √ | √ | × | × | × | × |
| 2010 | Muhammad[ | √ | √ | √ | × | √ | √ |
| 2010 | Glennie[ | √ | √ | √ | √ | √ | √ |
| 2011 | Atanacio[ | √ | √ | √ | × | √ | √ |
| 2012 | Mirzaei[ | √ | √ | × | √ | √ | √ |
| 2012 | Chen[ | √ | √ | × | √ | √ | √ |
| 2013 | Zhu[ | √ | √ | √ | √ | √ | √ |
| 2013 | Chan[ | √ | √ | √ | × | × | × |
| 2016 | Nouira[ | √ | √ | √ | × | × | √ |
| 2017 | Bergelt[ | √ | √ | √ | √ | √ | √ |
图2
Pandar XT机械式激光雷达结构示意图"
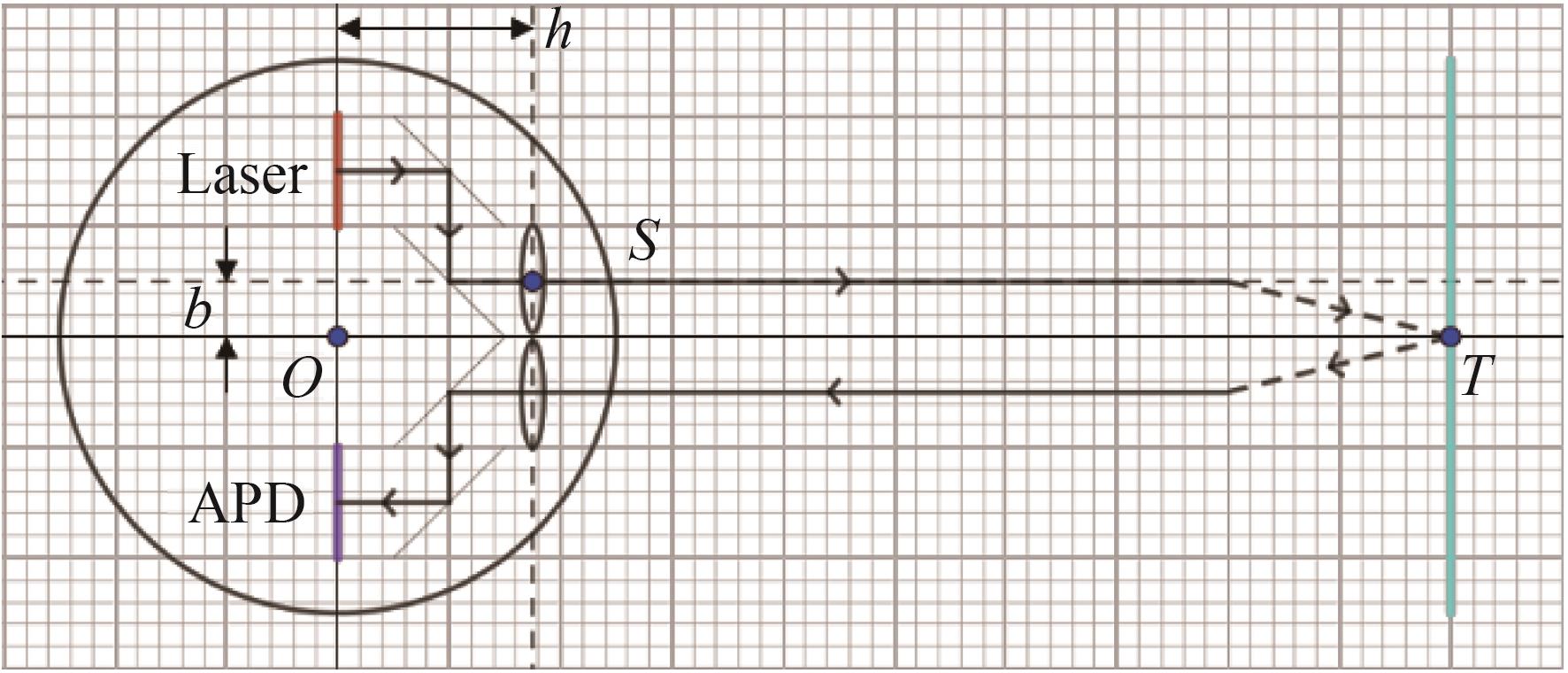
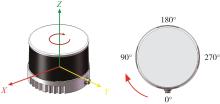
图3
激光雷达坐标系及方位角示意图"
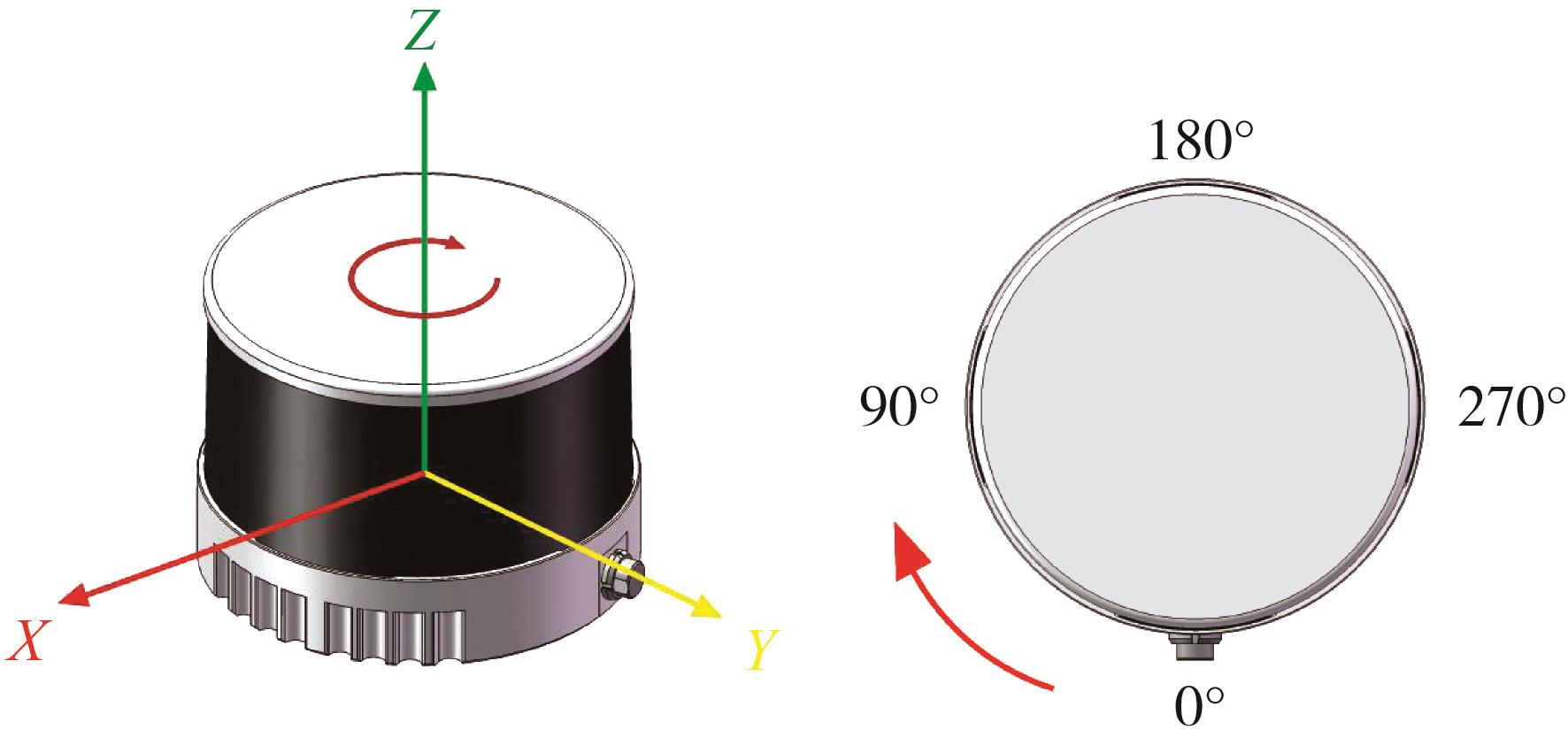

图4
测量示意图"
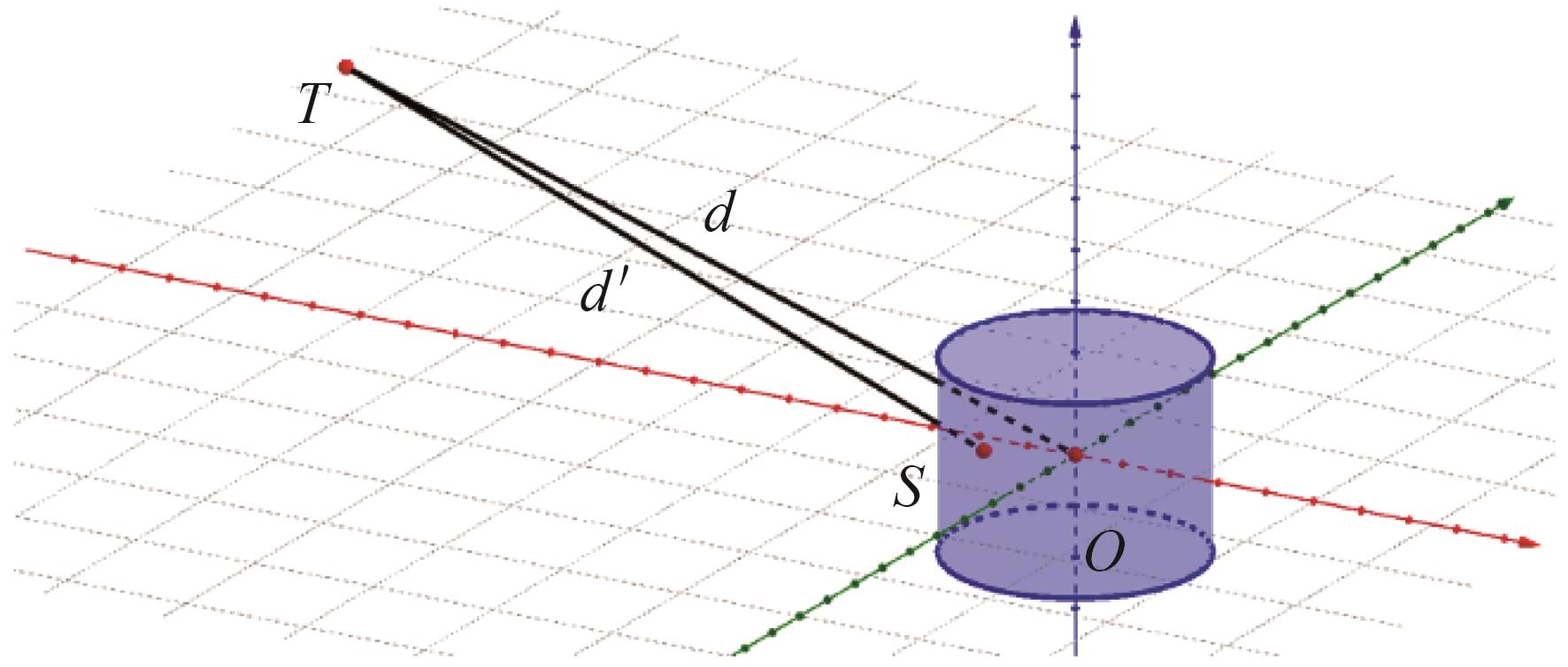
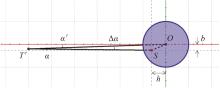
图5
方位角修正示意图"
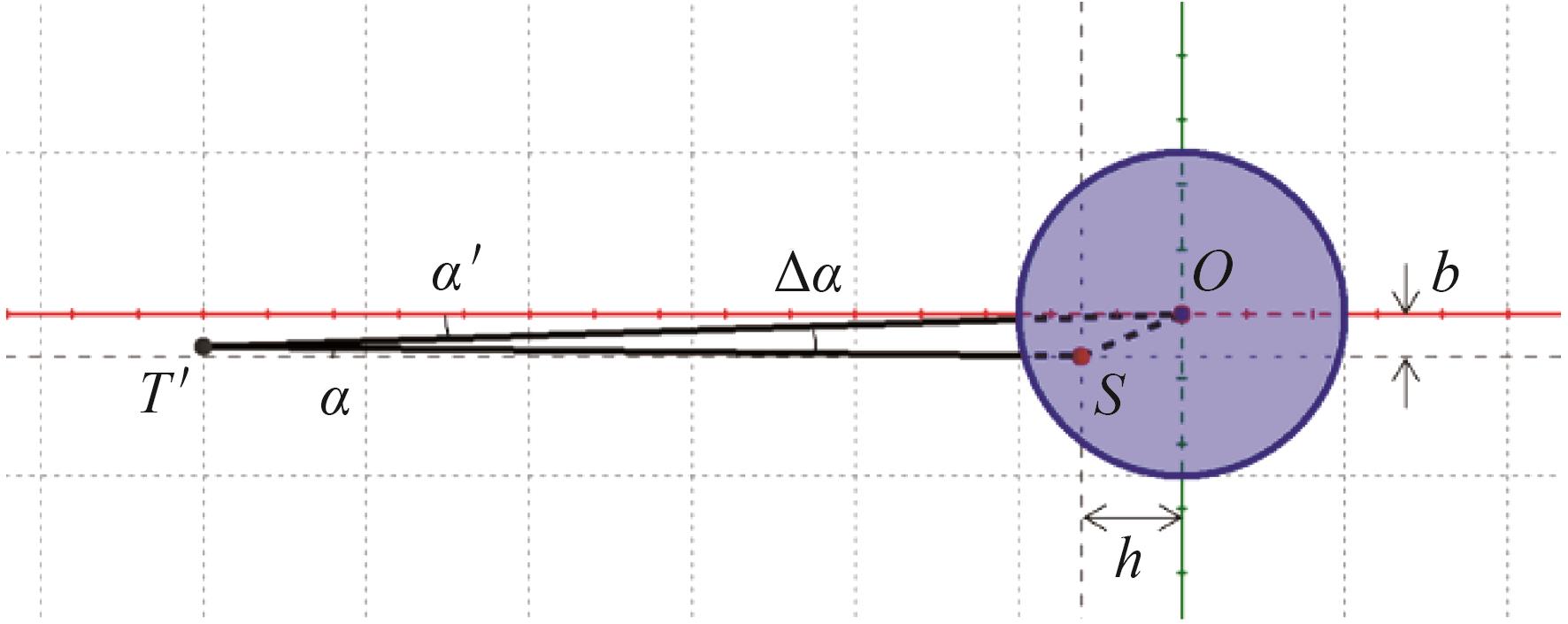

图6
俯仰角修正示意图"
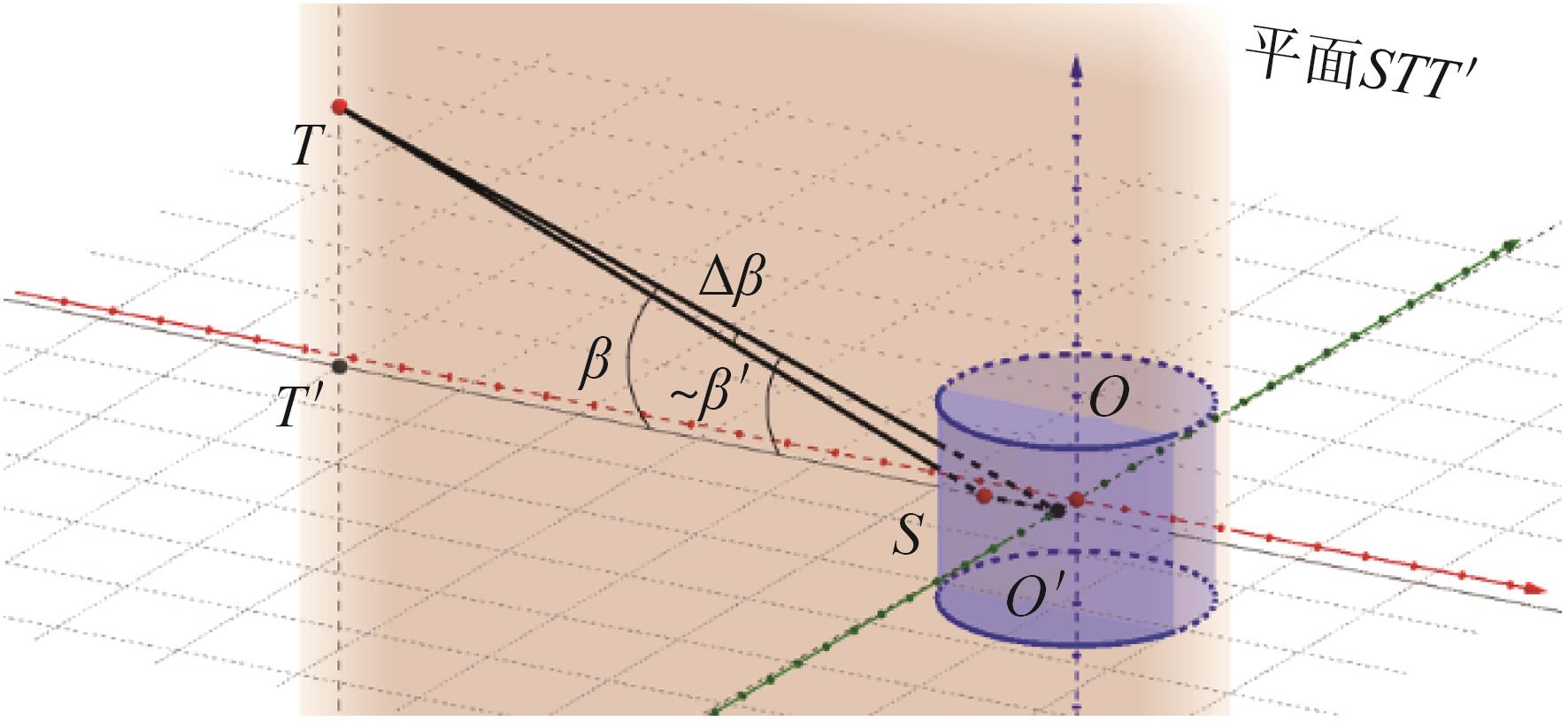
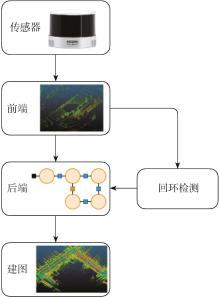
图7
SLAM算法框图"
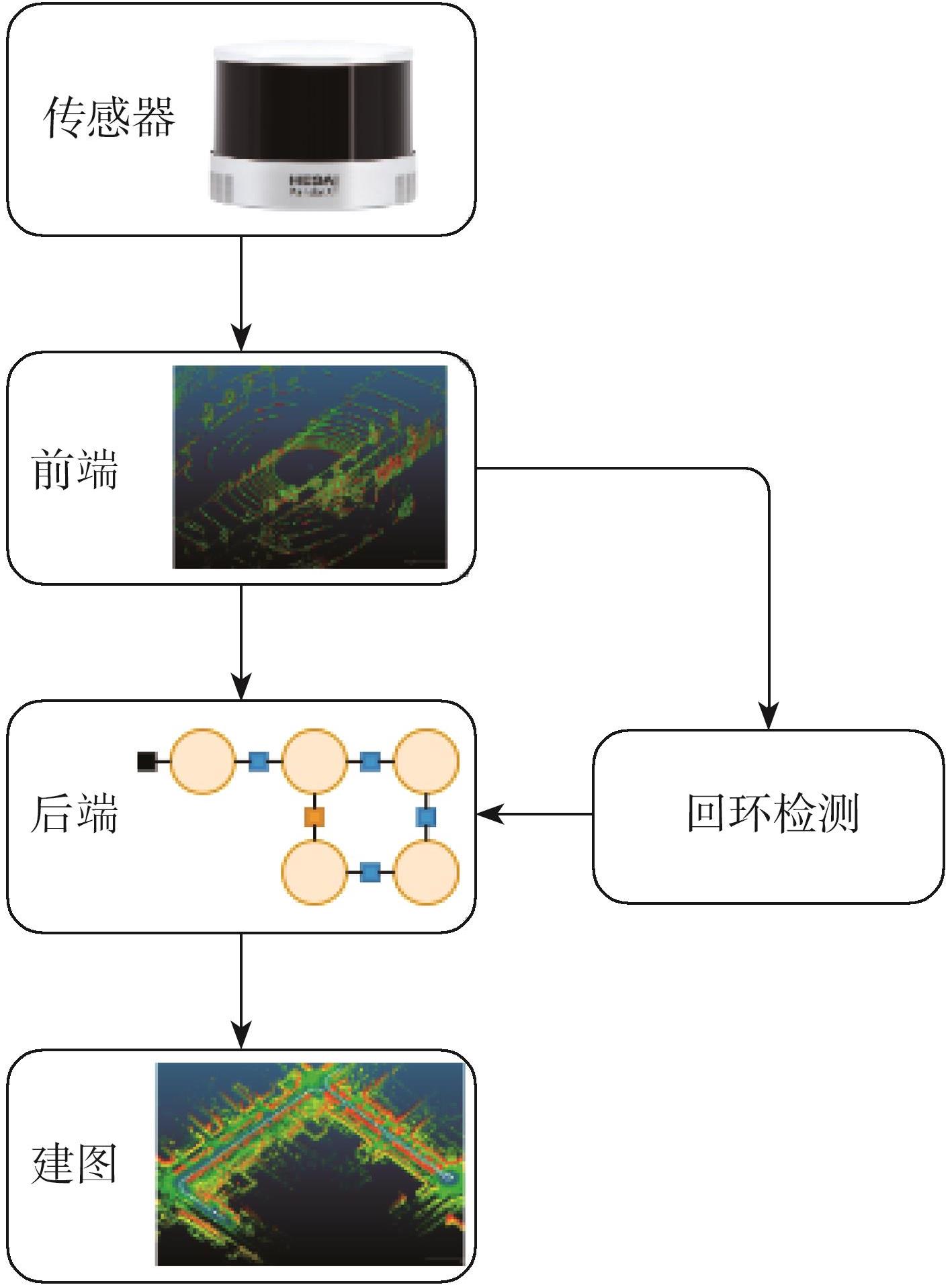
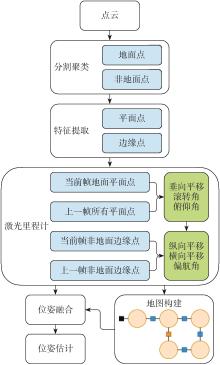
图8
LeGO?LOAM算法框图"
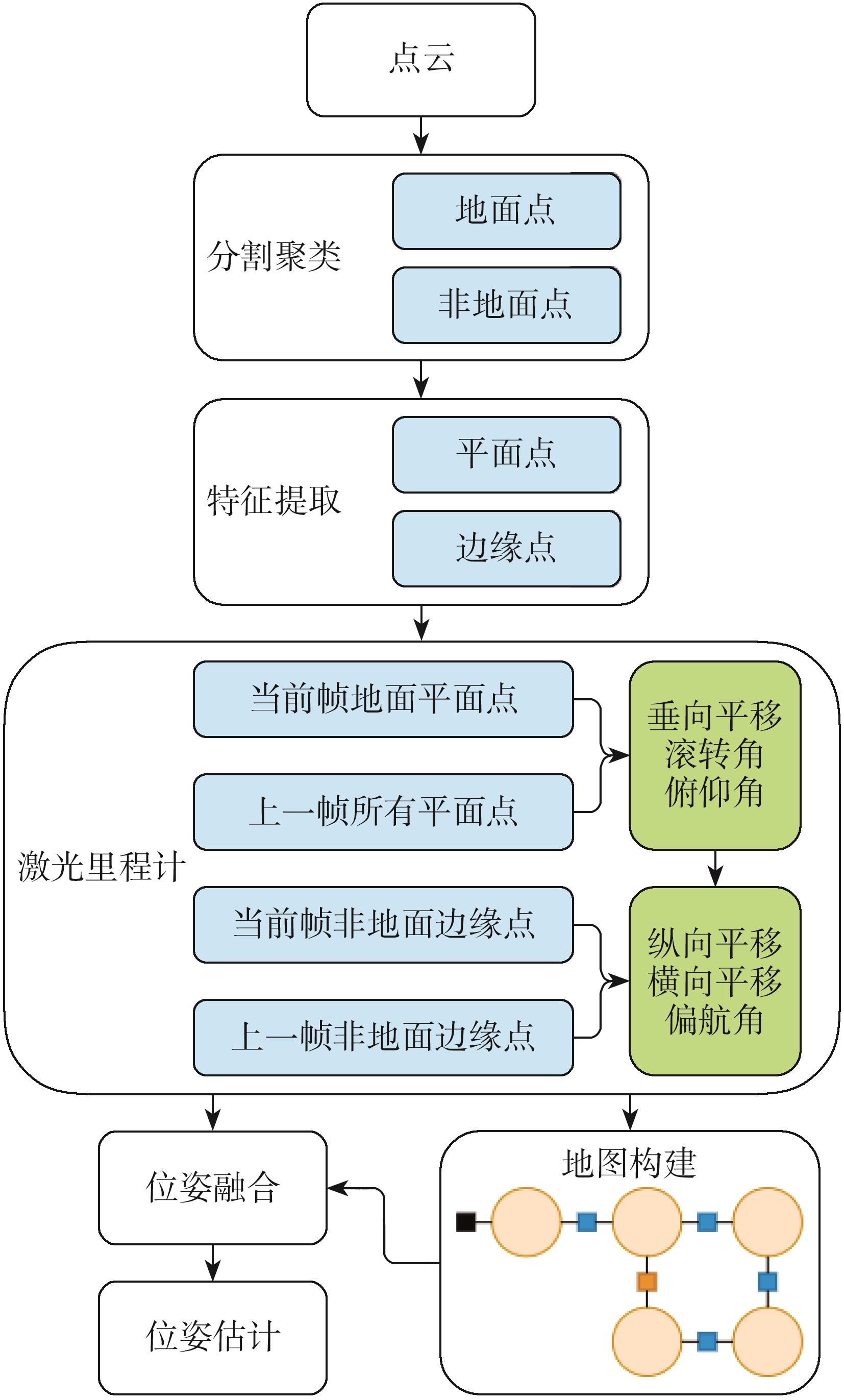
图9
平面点匹配示意图"
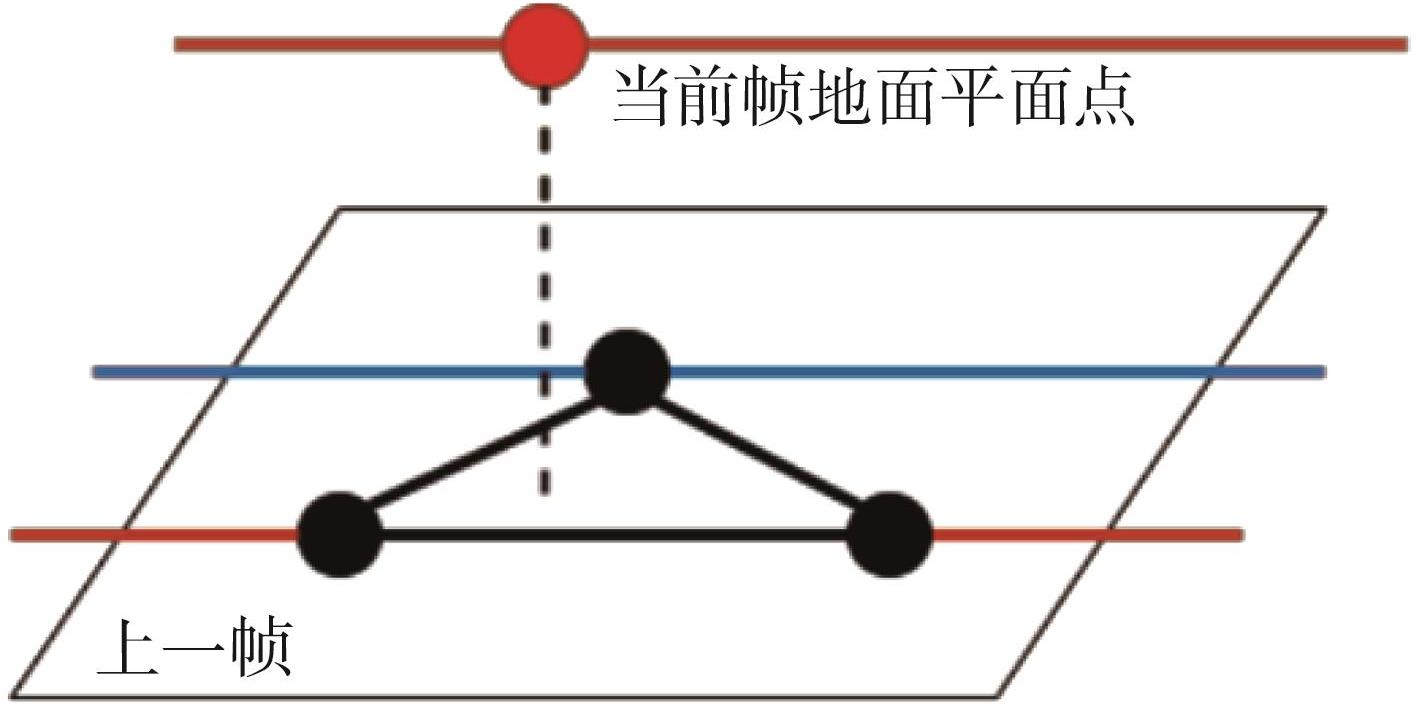
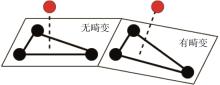
图10
畸变点云影响示意图"
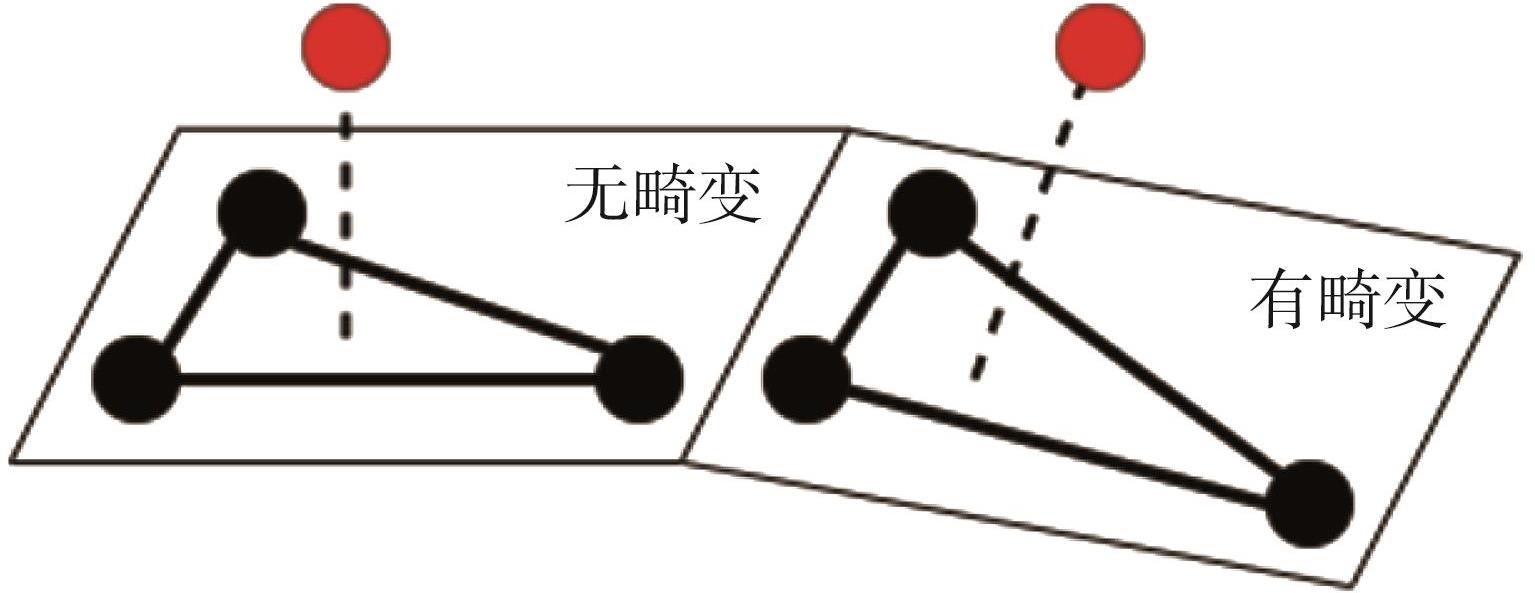
表2
线束参数选择"
| 线束 | ||
|---|---|---|
| 1 | 14.807 6 | -0.061 3 |
| 6 | 9.783 23 | -0.061 4 |
| 11 | 4.824 82 | -0.052 3 |
| 16 | 0.301 25 | -0.060 3 |
| 17 | -0.683 9 | -0.067 5 |
| 22 | -5.657 4 | -0.080 4 |
| 27 | -10.642 | -0.099 9 |
| 32 | -15.676 | -0.117 3 |
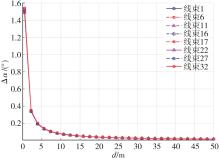
图11
方位角修正量变化Δα"
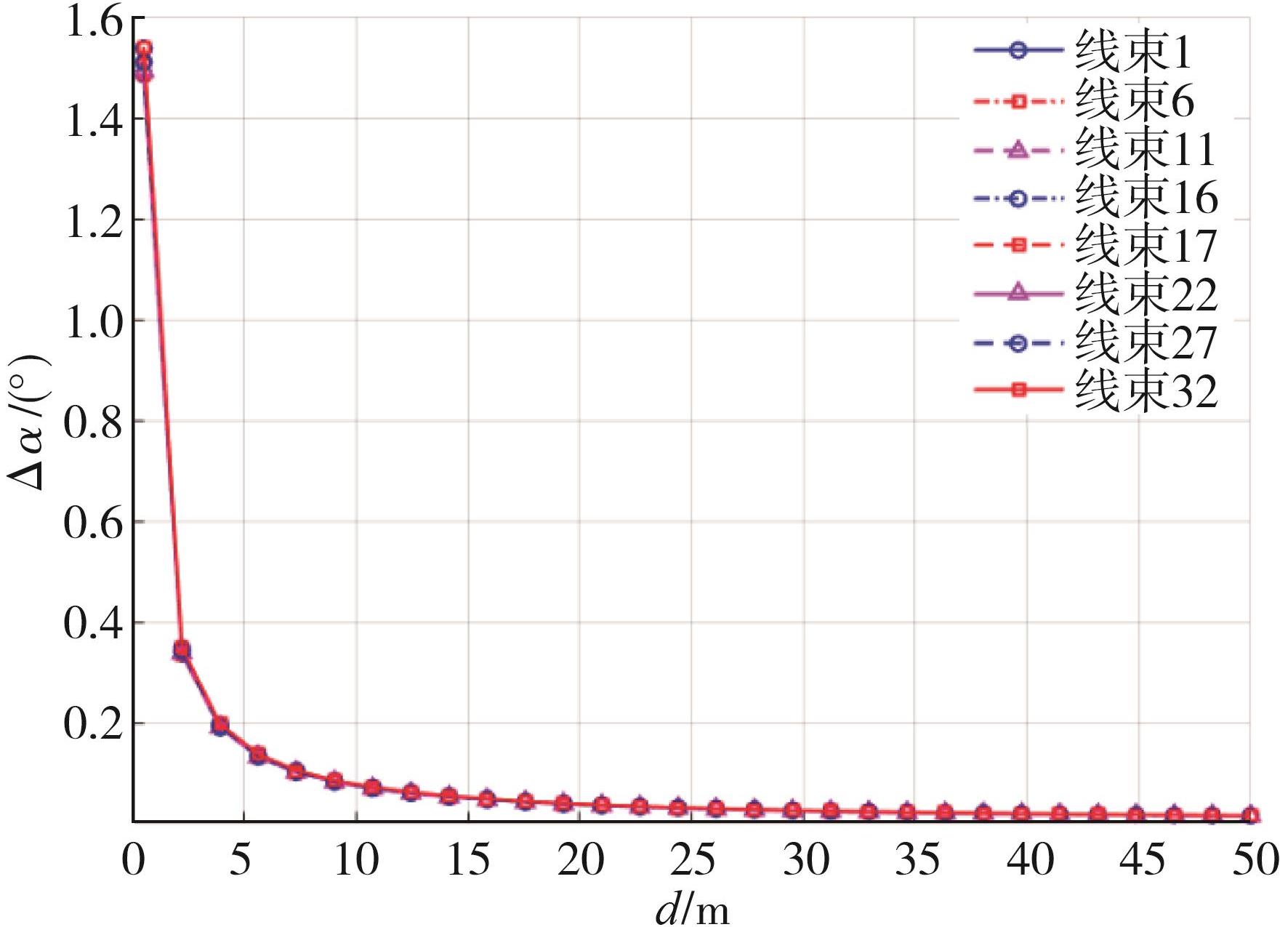
图12
俯仰角变化Δβ"
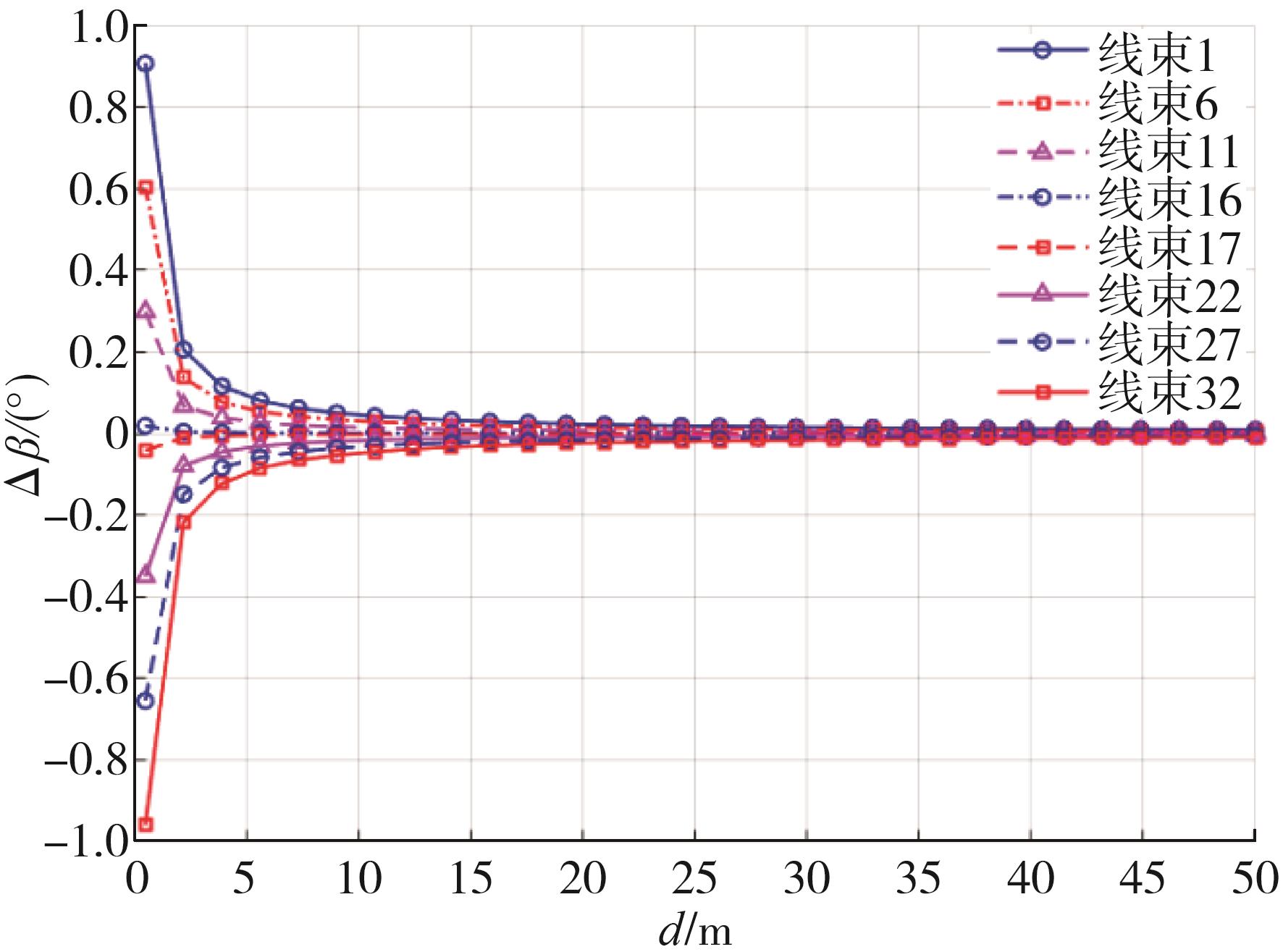
图13
距离测量值变化Δd"
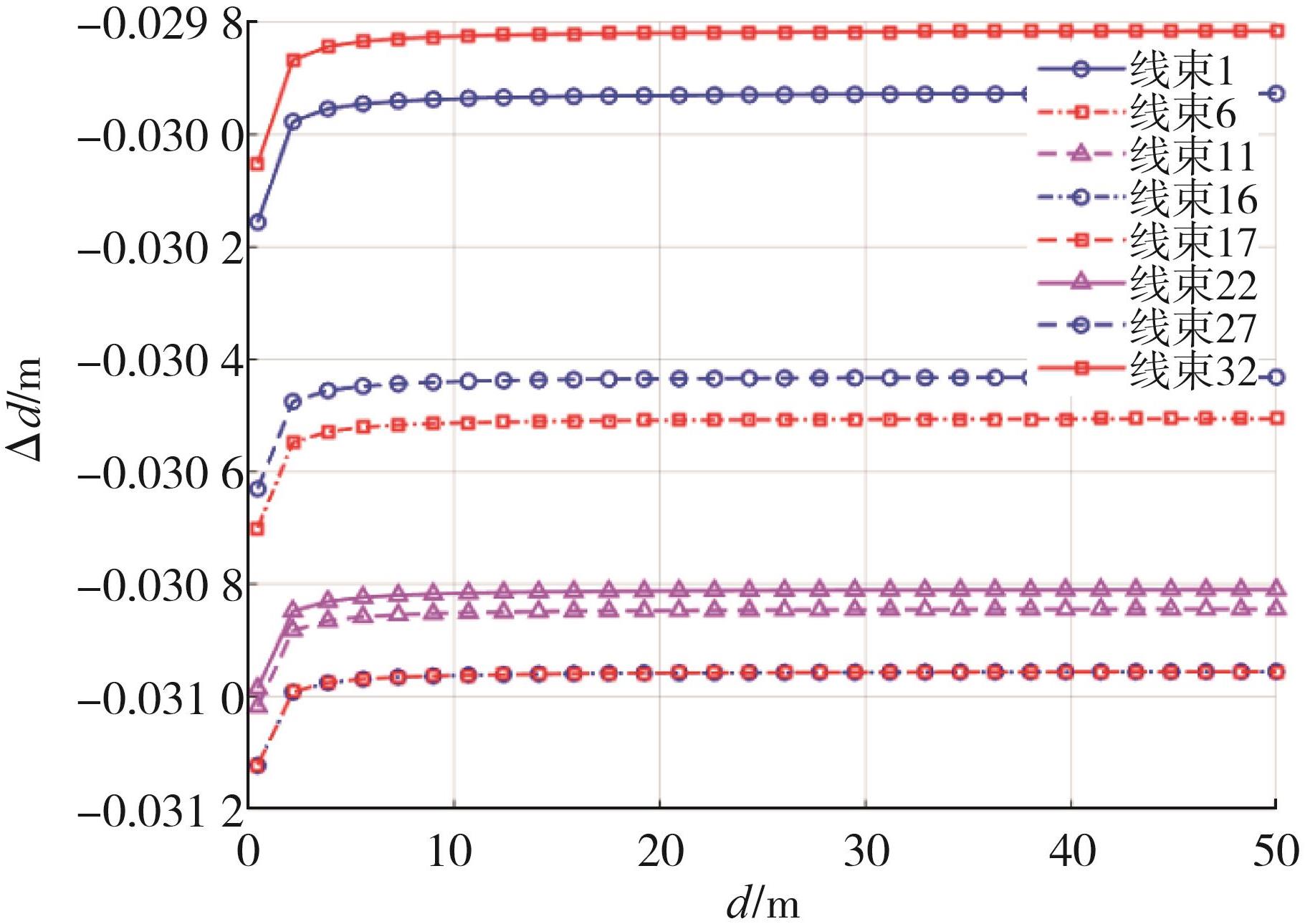

图14
标定板点云"
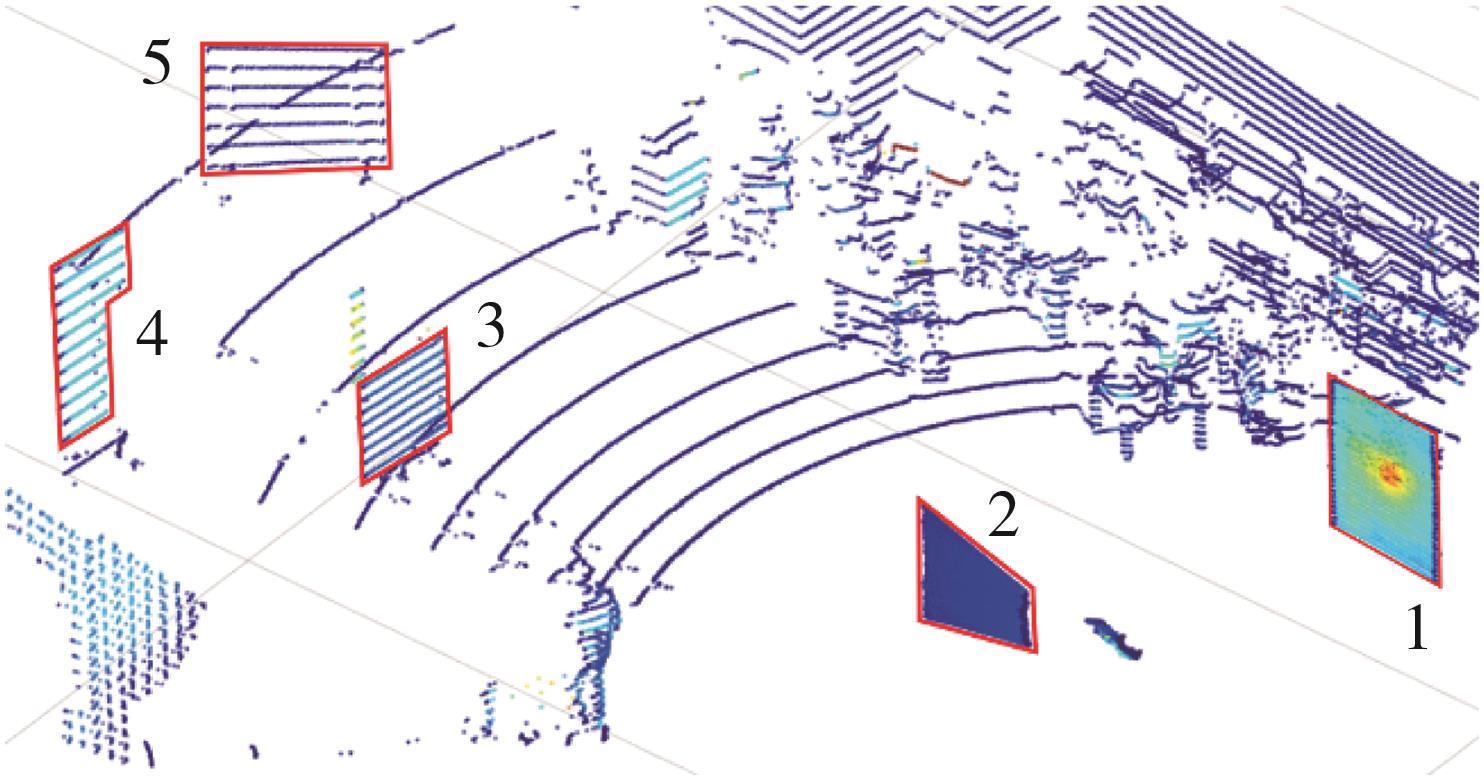
表3
标定板平面误差统计结果"
| 标定板 | 误差/mm | 距离/m | ||
|---|---|---|---|---|
| 无修正 | 角度修正 | 距离修正 | ||
| 1 | 14.950 091 | 4.595 796 | 4.595 825 | 3.088 4 |
| 2 | 8.417 082 | 6.708 674 | 6.710 810 | 0.681 8 |
| 3 | 12.224 109 | 5.371 252 | 5.371 180 | 7.532 2 |
| 4 | 11.119 527 | 6.157 632 | 6.157 584 | 10.120 4 |
| 5 | 7.231 133 | 6.950 977 | 6.950 979 | 8.294 8 |
表4
点云序列基本信息"
| 序列 | 距离/m | 时长/s | 场景 |
|---|---|---|---|
| 1 | 725.341 | 130 | 郊区公路 |
| 2 | 904.852 | 145 | 商业区 |
| 3 | 721.770 | 150 | 商业区 |

图15
里程计和建图结果"

表5
绝对位姿误差统计结果"
| 序列 | 修正方式 | ||
|---|---|---|---|
| 1 | 原始点云 | 14.060 | 3.258 |
| 角度修正 | 13.845 | 3.212 | |
| 距离修正 | 13.853 | 3.214 | |
| 2 | 原始点云 | 9.533 | 2.741 |
| 角度修正 | 9.450 | 2.686 | |
| 距离修正 | 9.326 | 2.690 | |
| 3 | 原始点云 | 5.531 | 1.950 |
| 角度修正 | 5.450 | 1.916 | |
| 距离修正 | 5.474 | 1.922 |

图 16
相对位姿误差"
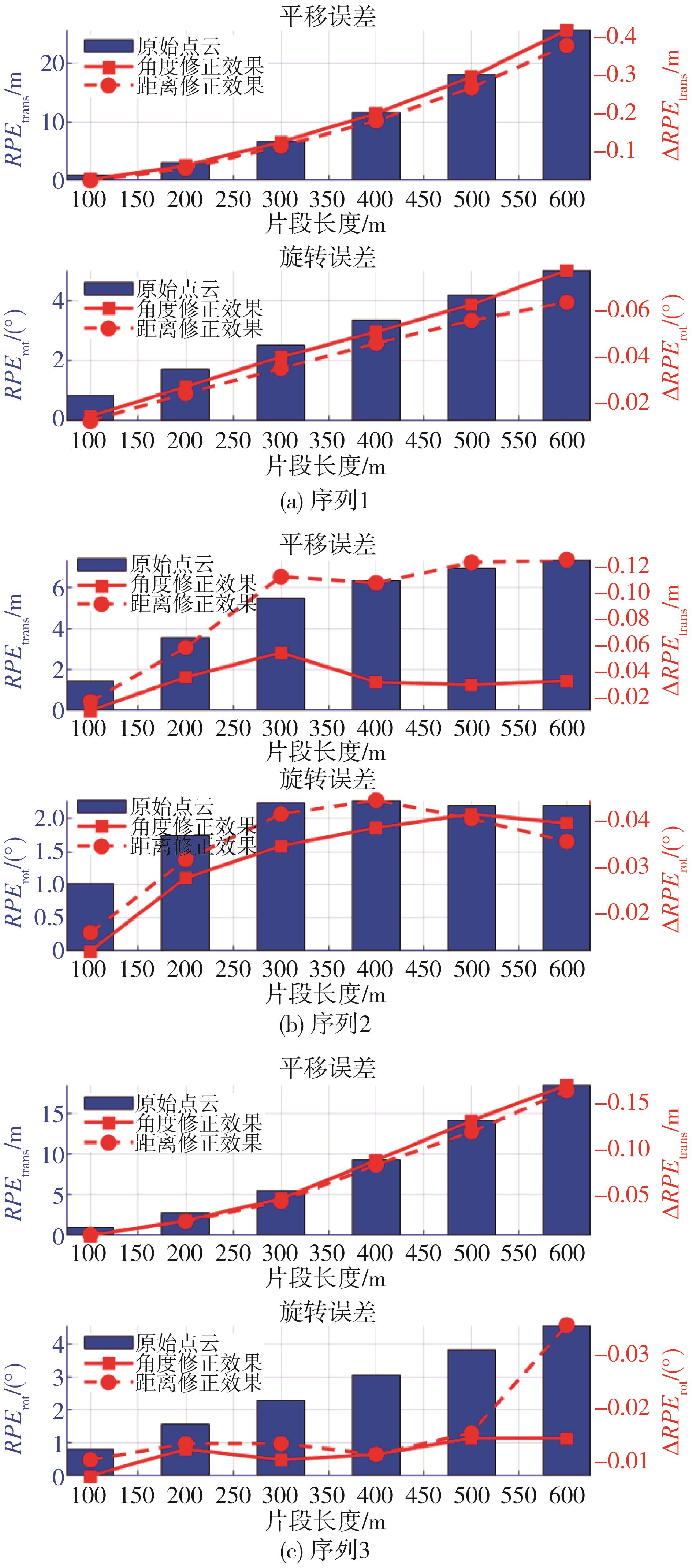
表6
里程计误差统计结果"
| 序列 | 修正方式 | ||
|---|---|---|---|
| 1 | 原始点云 | 2.566 | 0.846 |
| 角度修正 | 2.524 | 0.833 | |
| 距离修正 | 2.529 | 0.835 | |
| 2 | 原始点云 | 1.540 | 0.666 |
| 角度修正 | 1.530 | 0.656 | |
| 距离修正 | 1.515 | 0.655 | |
| 3 | 原始点云 | 2.072 | 0.772 |
| 角度修正 | 2.055 | 0.768 | |
| 距离修正 | 2.056 | 0.766 |
图17
单帧计算时间统计"
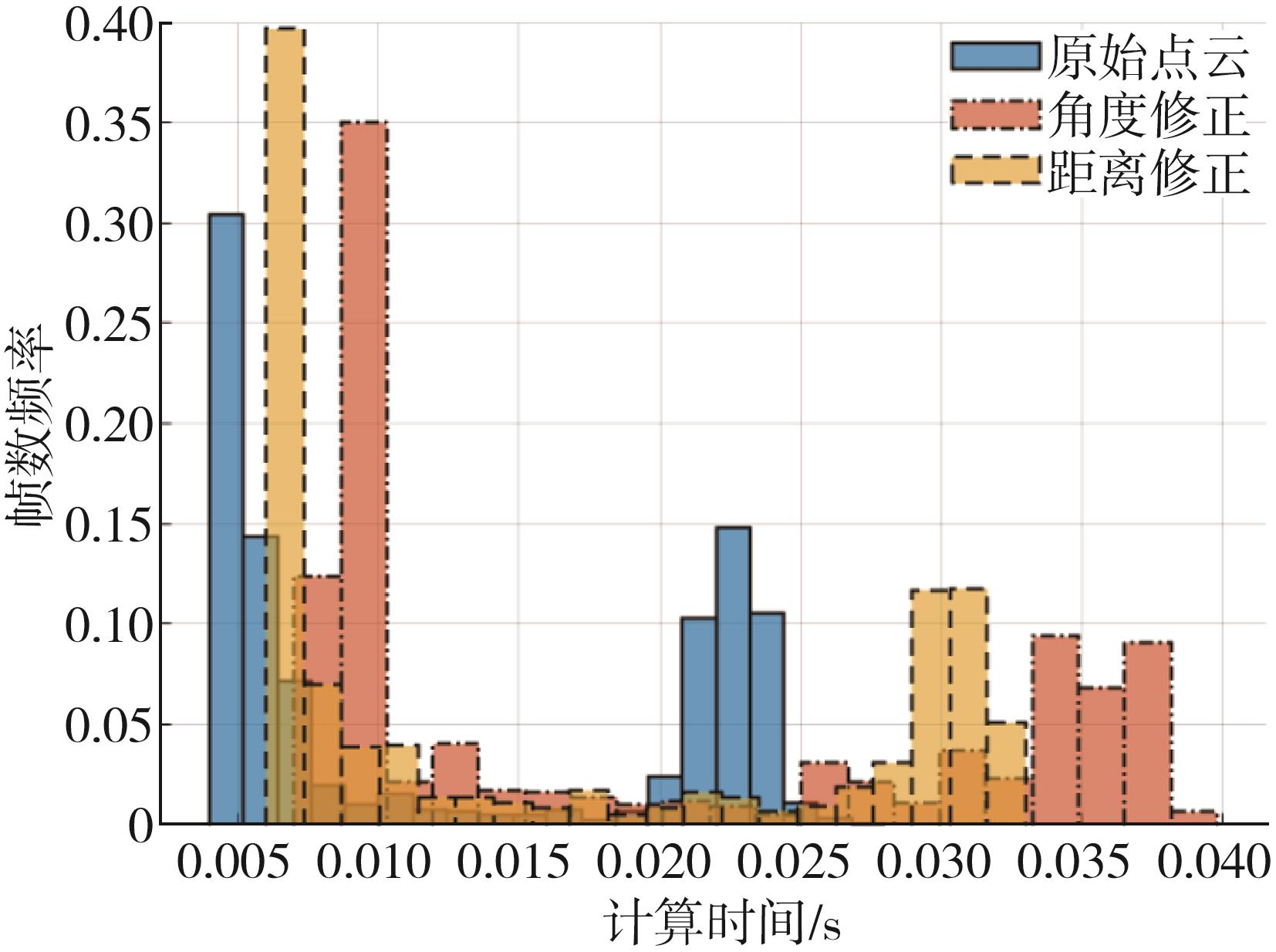
表7
修正算法对于实时性的影响"
| 处理时间/s | 原始点云 | 角度修正 | 距离修正 |
|---|---|---|---|
| 最小值 | 0.004 417 | 0.007 857 | 0.006 129 |
| 最大值 | 0.027 911 | 0.039 759 | 0.032 850 |
| 平均值 | 0.012 734 | 0.019 324 | 0.016 343 |
| 1 | RESHETYUK Y. Investigation and calibration of pulsed time⁃of⁃flight terrestrial laser scanners[D]. Stockholm: Royal Institute of Technology, 2006. |
| 2 | 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30(6): 1-197. |
| Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30(6): 1-197. | |
| 3 | 陈敬业, 时尧成. 固态激光雷达研究进展[J]. 光电工程, 2019, 46(7): 47-57. |
| CHEN J Y, SHI Y C. Research progress in solid⁃state LiDAR[J]. Opto⁃Electronic Engineering, 2019, 46(7): 47-57. | |
| 4 | MUHAMMAD N, LACROIX S. Calibration of a rotating multi⁃beam lidar[C].2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2010. |
| 5 | CHEN C Y, CHIEN H J. On⁃site sensor recalibration of a spinning multi⁃beam LiDAR system using automatically⁃detected planar targets[J]. Sensors, 2012, 12(10): 13736-13752. |
| 6 | LEVINSON J, THRUN S. Unsupervised calibration for multi⁃beam lasers[M]// Experimental Robotics. Springer Berlin Heidelberg, 2014. |
| 7 | HUANG J K, FENG C X, ACHAR M, et al. Global unifying intrinsic calibration for spinning and solid⁃state LiDARs[J]. ArXiv, 2020, 2012.03321. |
| 8 | GLENNIE C, LICHTI D D. Static calibration and analysis of the velodyne HDL⁃64E S2 for high accuracy mobile scanning[J]. Remote Sensing, MDPI AG, 2010, 2(6): 1610–1624. |
| 9 | PANDEY G, MCBRIDE J, SAVARESE S, et al. Extrinsic calibration of a 3D laser scanner and an omnidirectional camera[J]. IFAC Proceedings Volumes, 2010, 43(16): 336-341. |
| 10 | ATANACIO⁃JIMENEZ G, GONZALEZ⁃BARBOSA J J, HURTADO⁃RAMOS J B, et al. LiDAR velodyne HDL⁃64e calibration using pattern planes[J]. International Journal of Advanced Robotic Systems, 2011, 8(5). |
| 11 | MIRZAEI F M, KOTTAS D G, ROUMELIOTIS S I. 3D LiDAR⁃camera intrinsic and extrinsic calibration: identifiability and analytical least⁃squares⁃based initialization[J]. International Journal of Robotics Research, 2012, 31(4):452-467. |
| 12 | CHEN C Y, CHEIN H J, HUANG P S, et al. Intrinsic parameters calibration for multi⁃beam LiDAR using the levenberg⁃marquardt algorithm[C]. Proceedings of the 27th Conference on Image and Vision Computing. New York: Association for Computing Machinery, 2012: 19-24. |
| 13 | ZHU Z, LIU J L. Calibration of a multi⁃beam LiDAR by using linear instrumental error model[J]. Applied Mechanics and Materials, 2013: 380-384. |
| 14 | CHAN T O, LICHTI D D, BELTON D. Temporal analysis and automatic calibration of the velodyne HDL⁃32E LiDAR system[J]. Political Studies, 2013, II⁃5/W2(4):61-66. |
| 15 | NOUIRA H, DESCHAUD J E, GOULETTE F. Point cloud refinement with a target⁃free intrinsic calibration of a mobile multi⁃beam LiDAR system[J]. ISPRS⁃International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, XLI⁃B3: 359-366. |
| 16 | BERGELT R, KHAN O, HARDT W. Improving the intrinsic calibration of a velodyne LiDAR sensor[C]. IEEE SENSORS 2017. IEEE, 2017. |
| 17 | LIU J, XIAO J H, CAO H J, et al. The status and challenges of high precision map for automated driving[C]. China Satellite Navigation Conference (CSNC) 2019 Proceedings. Singapore: Springer Singapore, 2019: 266-276. |
| 18 | LIU R, WANG J, ZHANG B. High definition map for automated driving: overview and analysis[J]. Journal of Navigation, 2019, 73(2):1-18. |
| 19 | 高翔, 张涛, 刘毅, 等. 视觉SLAM十四讲[M]. 北京: 电子工业出版社, 2019. |
| GAO X, ZHANG T, LIU Y, et al. 14 Lectures on visual SLAM: from theory to practice[M]. Beijing: Publishing House of Electronics Industry, 2019. | |
| 20 | CADENA C, CARLONE L, CARRILLO H, et al. Simultaneous localization and mapping: present, future, and the robust⁃perception age[J]. ArXiv, 2016, 1606.05830. |
| 21 | ZHANG J, SINGH S. LOAM: lidar odometry and mapping in real-time[C]. Robotics: Science and Systems Conference, 2014. |
| 22 | ZHANG J, SINGH S. Low⁃drift and real⁃time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2): 401-416. |
| 23 | SHAN T X, ENGLOT B. LeGO⁃LOAM: lightweight and ground⁃optimized lidar odometry and mapping on variable terrain[C]. |
| 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018: 4758-4765. | |
| 24 | TORR P H S, ZISSERMAN A. MLESAC: a new robust estimator with application to estimating image geometry[J]. Computer Vision and Image Understanding, 2000, 78(1): 138-156. |
| 25 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite[C]. IEEE Conference on Computer Vision & Pattern Recognition. IEEE, 2012. |
| [1] | 伍文广,田双岳,张志勇,金斌,邱增华. 凸凹不平道路几何参数识别和模型重构方法研究[J]. 汽车工程, 2023, 45(2): 273-284. |
| [2] | 王海,李洋,蔡英凤,孙恺,陈龙. 基于激光雷达的3D实时车辆跟踪[J]. 汽车工程, 2021, 43(7): 1013-1021. |
| [3] | 龚章鹏,王国业,于是. 基于体素网络的道路场景多类目标识别算法[J]. 汽车工程, 2021, 43(4): 469-477. |
| [4] | 罗玉涛,秦瀚. 基于稀疏彩色点云的自动驾驶汽车3D目标检测方法[J]. 汽车工程, 2021, 43(4): 492-500. |
| [5] | 姜武华,周松林,王其东,陈无畏,陈佳佳. 基于自适应多特征融合的路沿检测与跟踪方法研究[J]. 汽车工程, 2021, 43(12): 1762-1770. |
| [6] | 赵治国,王鹏,陈晓蓉,梁凯冲. 转向避撞工况下装载激光雷达车辆的障碍物跟踪[J]. 汽车工程, 2021, 43(11): 1611-1619. |
| [7] | 徐国艳, 牛欢, 郭宸阳, 苏鸿杰. 基于三维激光点云的目标识别与跟踪研究*[J]. 汽车工程, 2020, 42(1): 38-46. |
| [8] | 娄新雨, 王海, 蔡英凤, 郑正扬, 陈龙. 采用64线激光雷达的实时道路障碍物检测与分类算法的研究[J]. 汽车工程, 2019, 41(7): 779-754. |
| [9] | 范晶晶, 王力, 褚文博, 罗禹贡. 基于KDTree树和欧式聚类的越野环境下行人识别的研究*[J]. 汽车工程, 2019, 41(12): 1410-1415. |
| [10] | 谢德胜,徐友春,王任栋,苏致远. 基于三维激光雷达的无人车障碍物检测与跟踪[J]. 汽车工程, 2018, 40(8): 952-959. |
|