汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 995-1004.doi: 10.19562/j.chinasae.qcgc.2021.07.006
张志勇1( ),龙凯1,杜荣华1,黄彩霞2
),龙凯1,杜荣华1,黄彩霞2
收稿日期:2020-08-28
修回日期:2021-01-28
出版日期:2021-07-25
发布日期:2021-07-20
通讯作者:
张志勇
E-mail:zzy04@163.com
基金资助:
Zhiyong Zhang1(),Kai Long1,Ronghua Du1,Caixia Huang2
Received:2020-08-28
Revised:2021-01-28
Online:2021-07-25
Published:2021-07-20
Contact:
Zhiyong Zhang
E-mail:zzy04@163.com
摘要:
自动驾驶汽车高速超车时不仅要规划合理的换道路径来保证安全性,而且还要确保车辆高速转弯行驶的横向稳定性和舒适性。针对车辆超车的换道、匀速和换道3个阶段,分别规划了纵向速度和横向超车路径。提出了考虑路径曲率、换道时间、纵向车速的期望横摆角速度计算方法。以最小化横向位置偏差、横摆角速度跟踪偏差和控制增量为优化目标,通过可拓集的关联函数动态分配轨迹跟踪精度和横向稳定性的权重系数,建立了自动驾驶汽车轨迹跟踪的多目标模型预测可拓协调控制策略。数值仿真结果表明,提出的路径规划方法能保证车辆安全超车,轨迹跟踪控制策略不仅能精确地跟踪规划的路径,而且具有较高的横向稳定性和舒适性。
张志勇,龙凯,杜荣华,黄彩霞. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004.
Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking[J]. Automotive Engineering, 2021, 43(7): 995-1004.
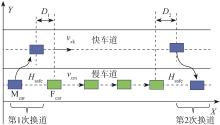
图 1
自动驾驶汽车的高速超车过程"
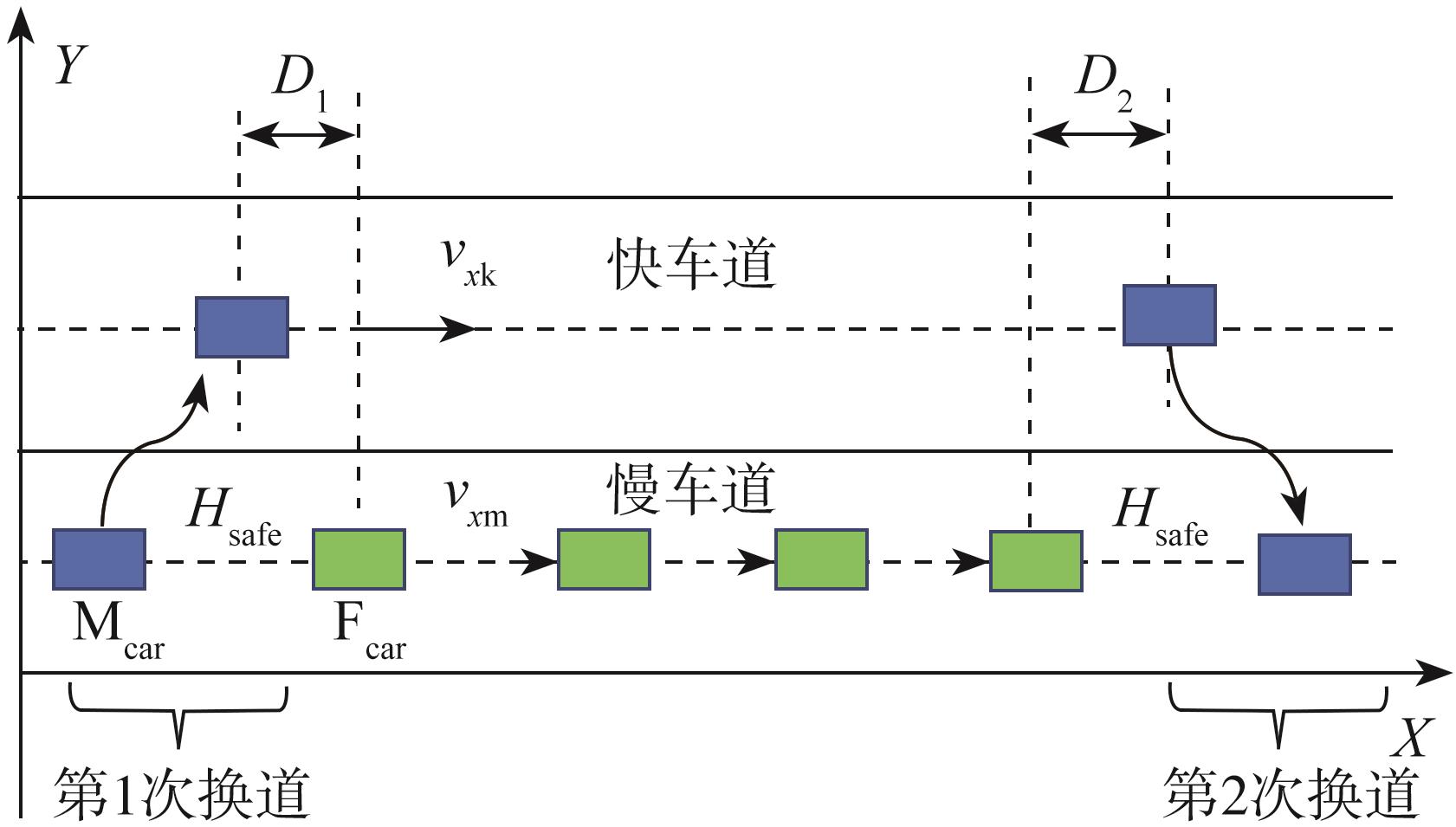
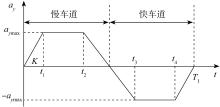
图 2
梯形横向加速度"
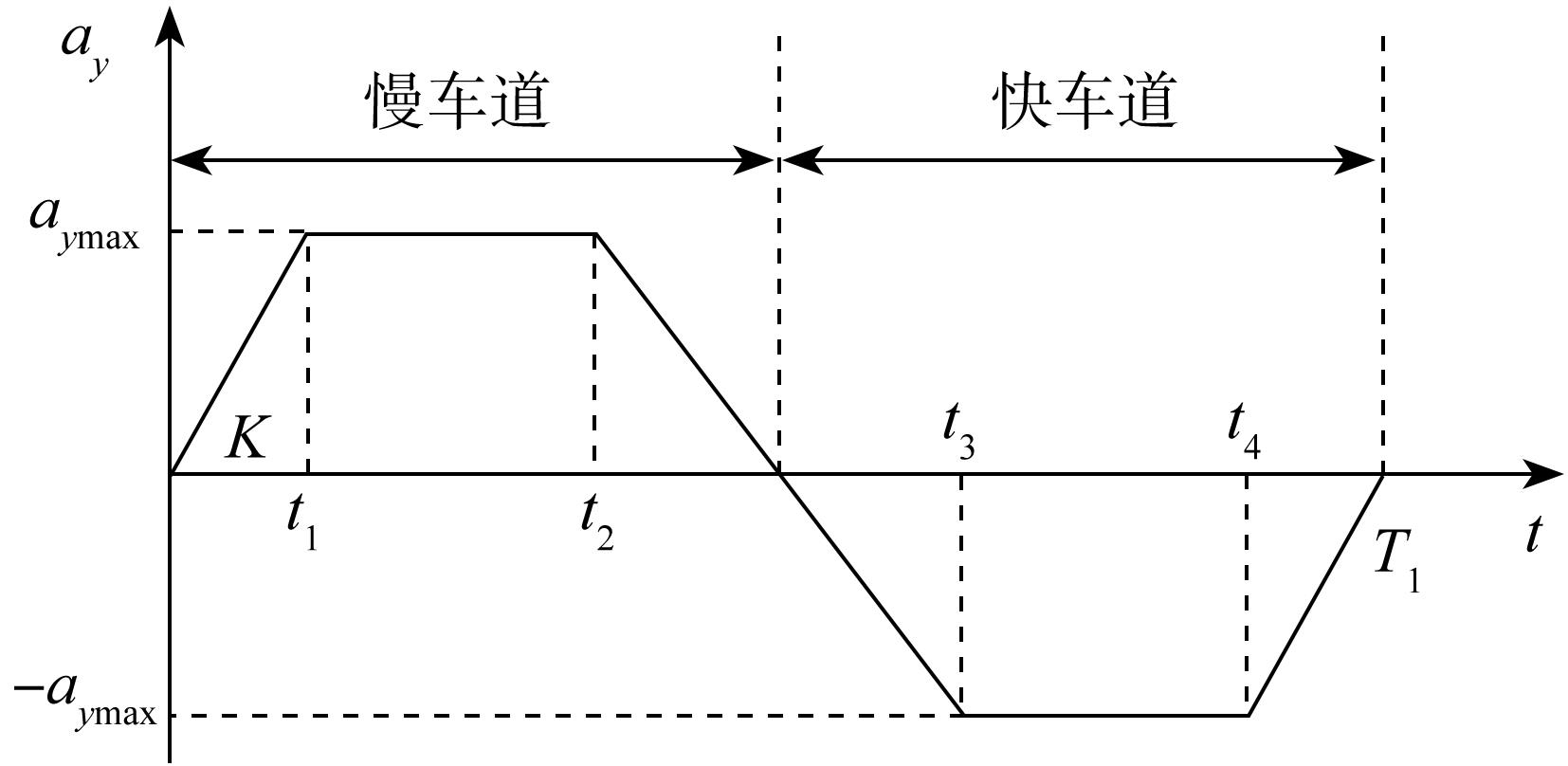
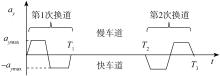
图 3
超车过程中的梯形横向加速度"
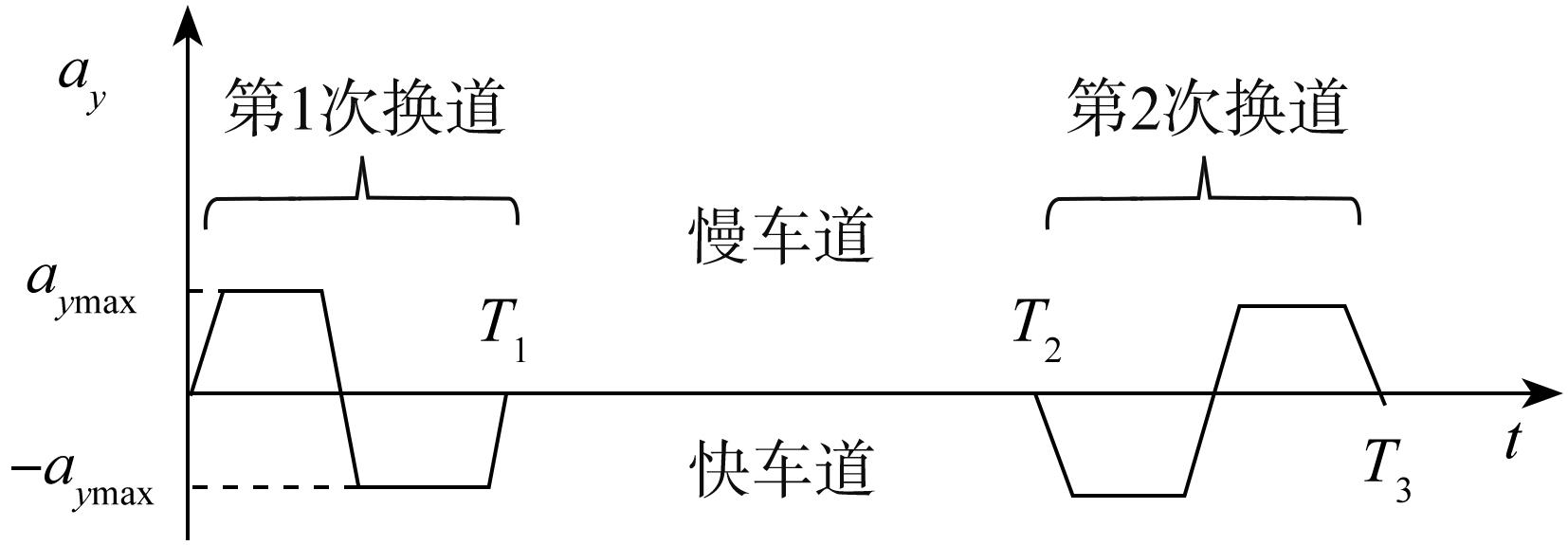

图 4
车辆2自由度动力学模型"
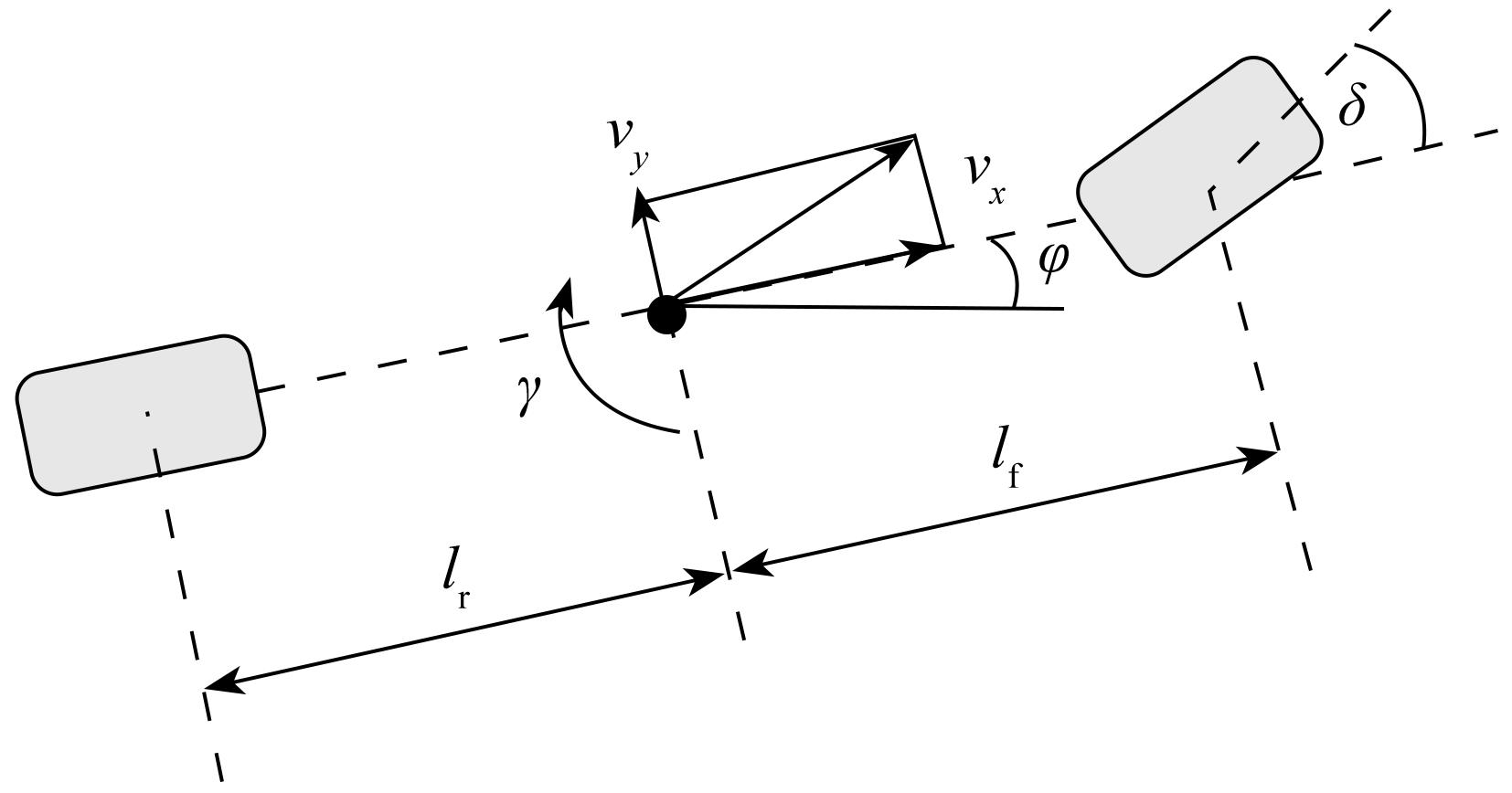

图 5
二维可拓集合"
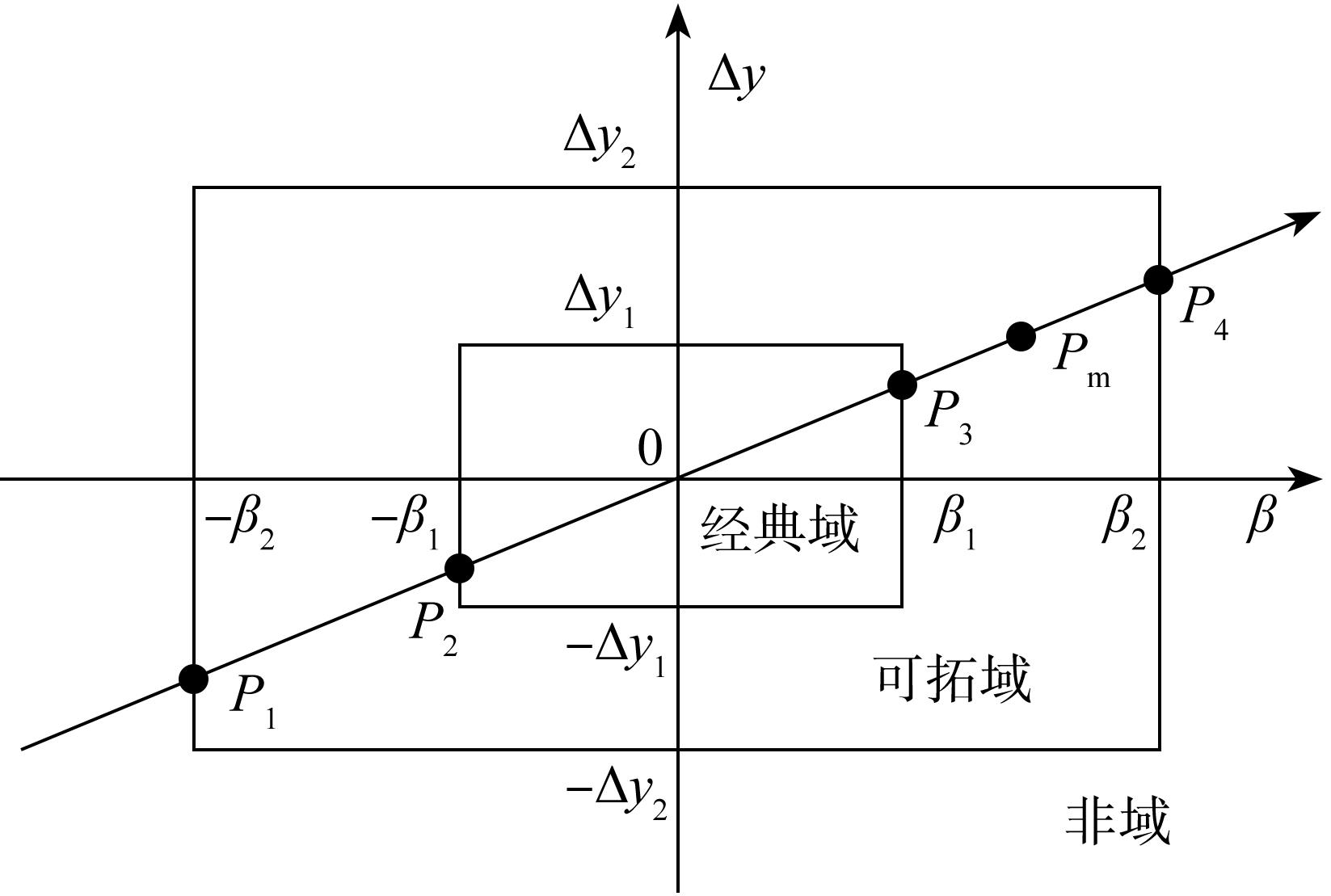
表 1
可拓距计算方法"
| Pm的位置 | [-∞,P1] | [P1,0] | [0,P4] | [P4,+∞] |
|---|---|---|---|---|
| dkt | |PmP1| | -|PmP1| | -|PmP4| | |PmP4| |
| Pm的位置 | [-∞,P2] | [P2,0] | [0,P3] | [P3,+∞] |
| djd | |PmP2| | -|PmP2| | -|PmP3| | |PmP3| |
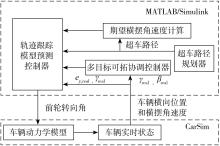
图 6
控制系统的联合仿真示意图"
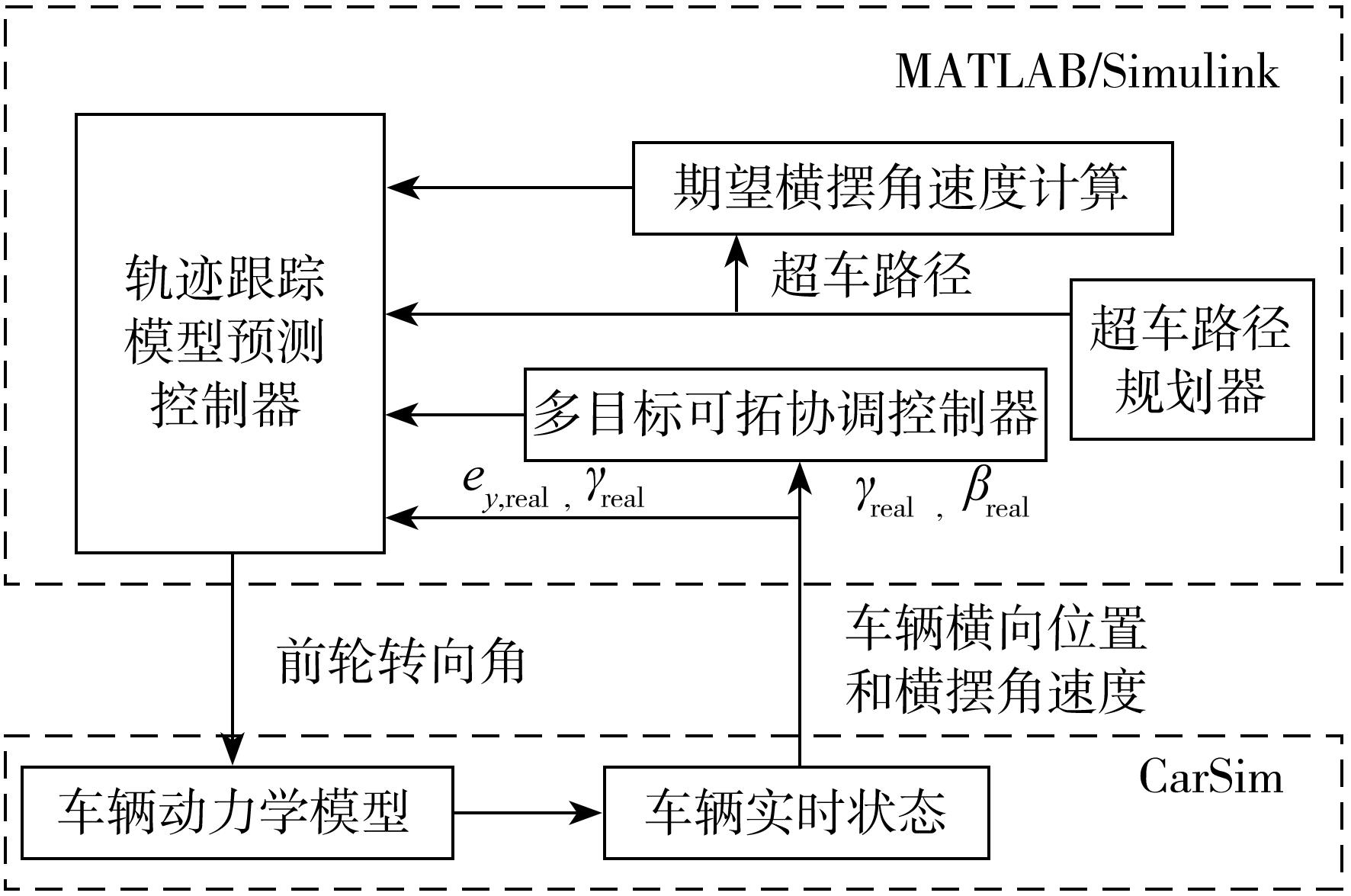
表 2
车辆动力学模型参数"
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 1 575 |
| 质心与前轴的间距lf /m | 1.2 |
| 质心与后轴的间距lr /m | 1.6 |
| 车身绕Z轴的转动惯量Iz /(kg·m-2) | 2 875 |
| 前轮的侧偏刚度Cf /(N·(°)-1) | 20 000 |
| 后轮的侧偏刚度Cr /(N·(°)-1) | 35 000 |

图 7
轨迹跟踪精度分析"
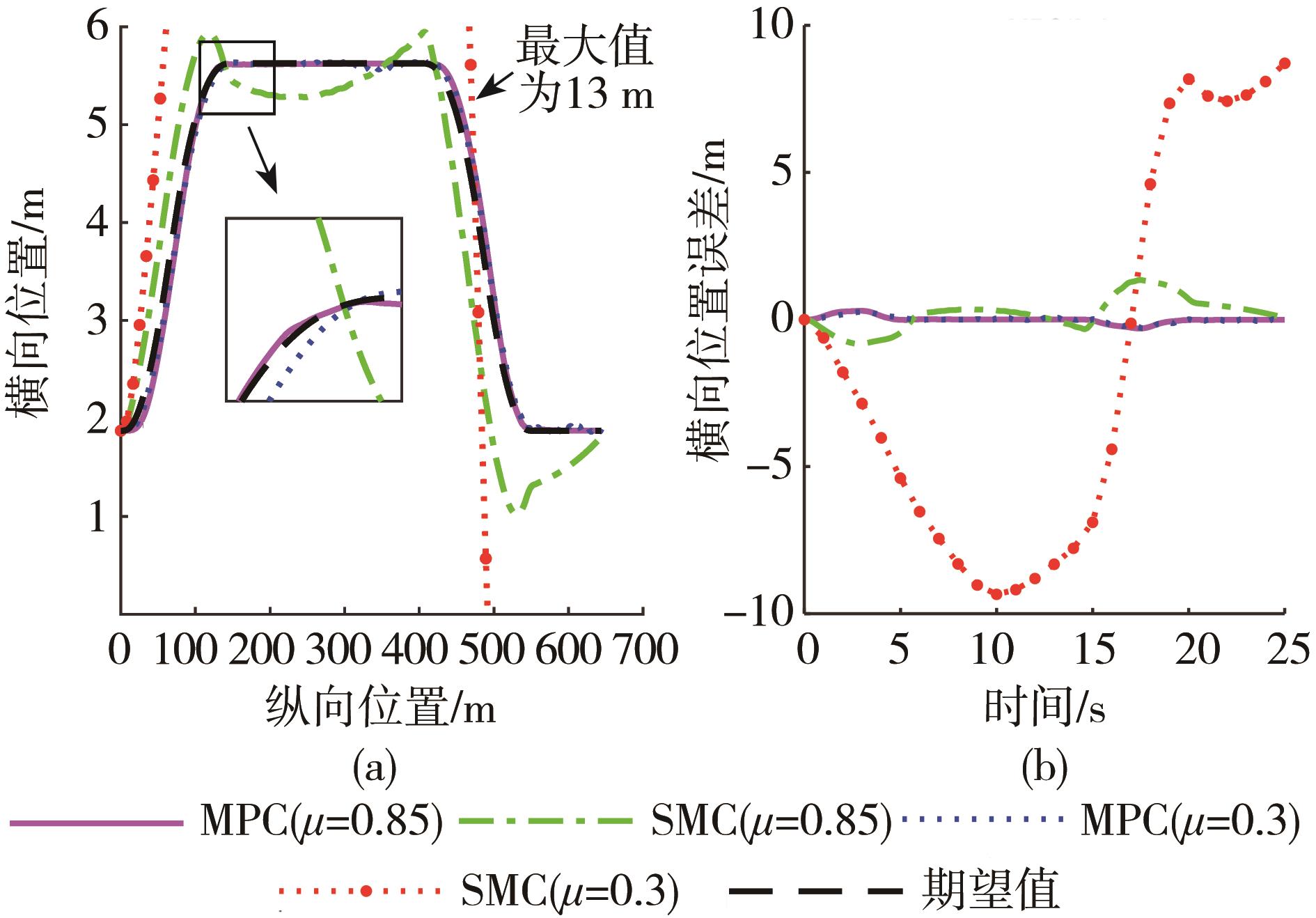
图 8
横向稳定性对比分析"
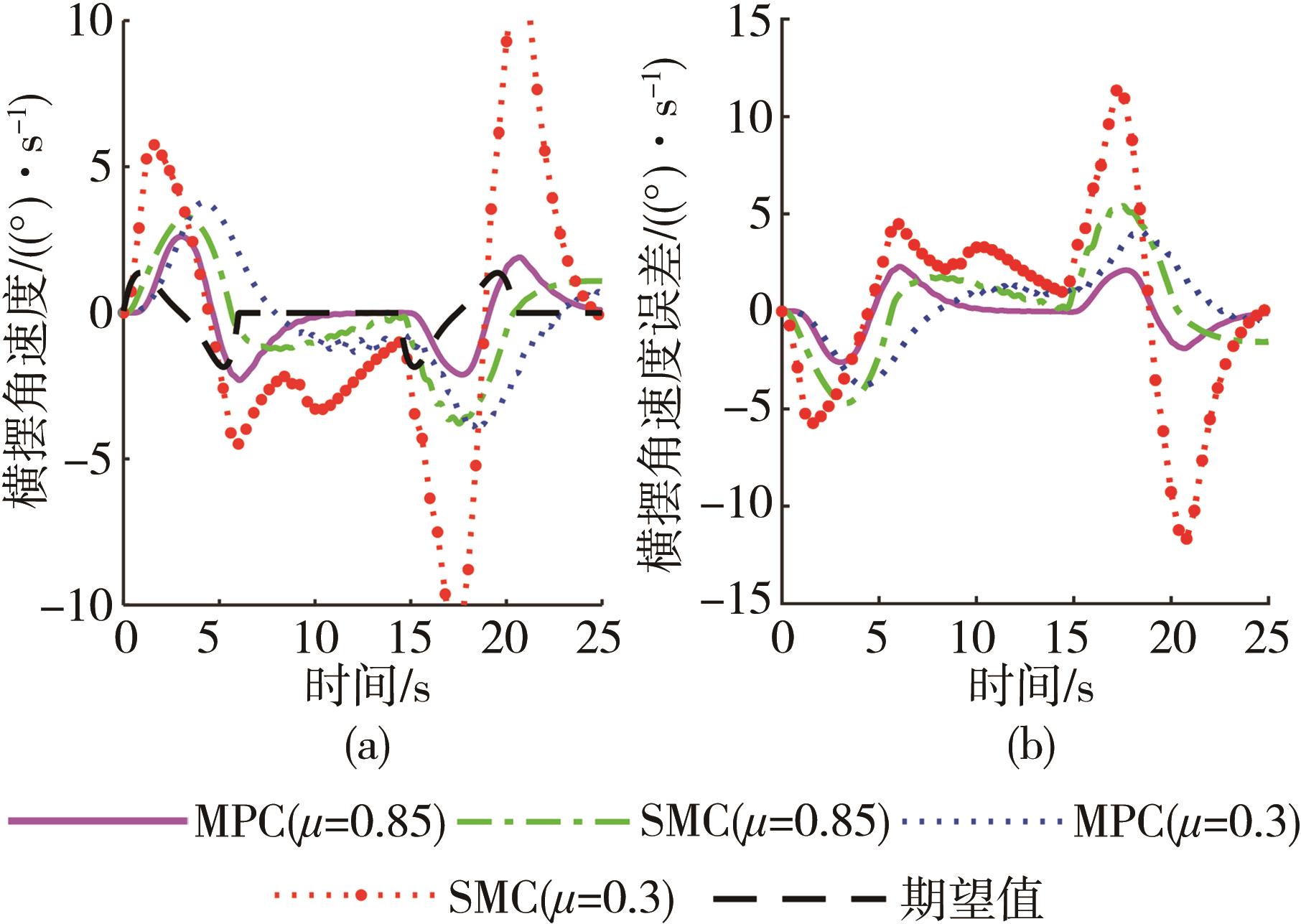
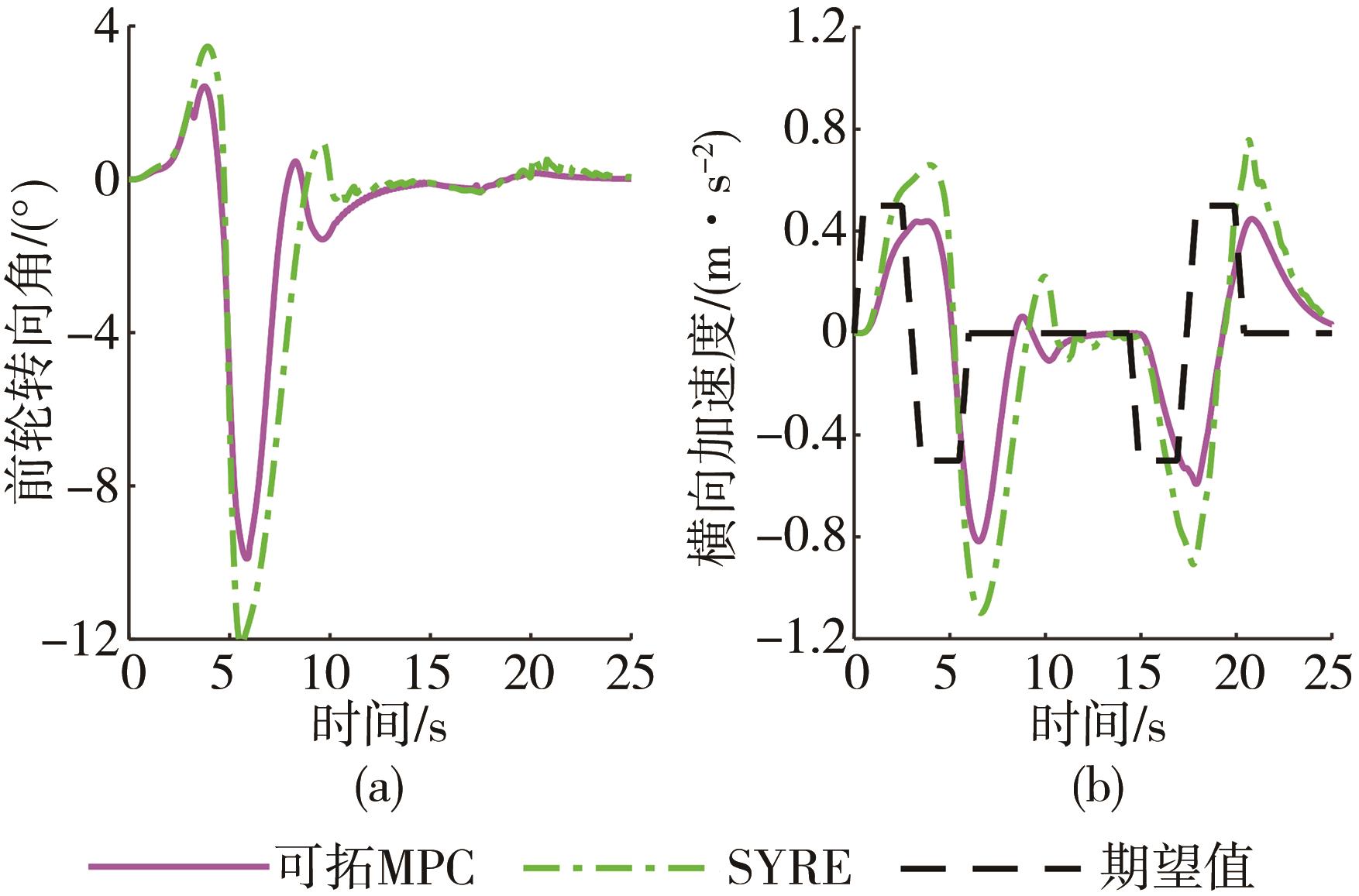
图 9
可拓MPC与SYRE轨迹跟踪精度对比"
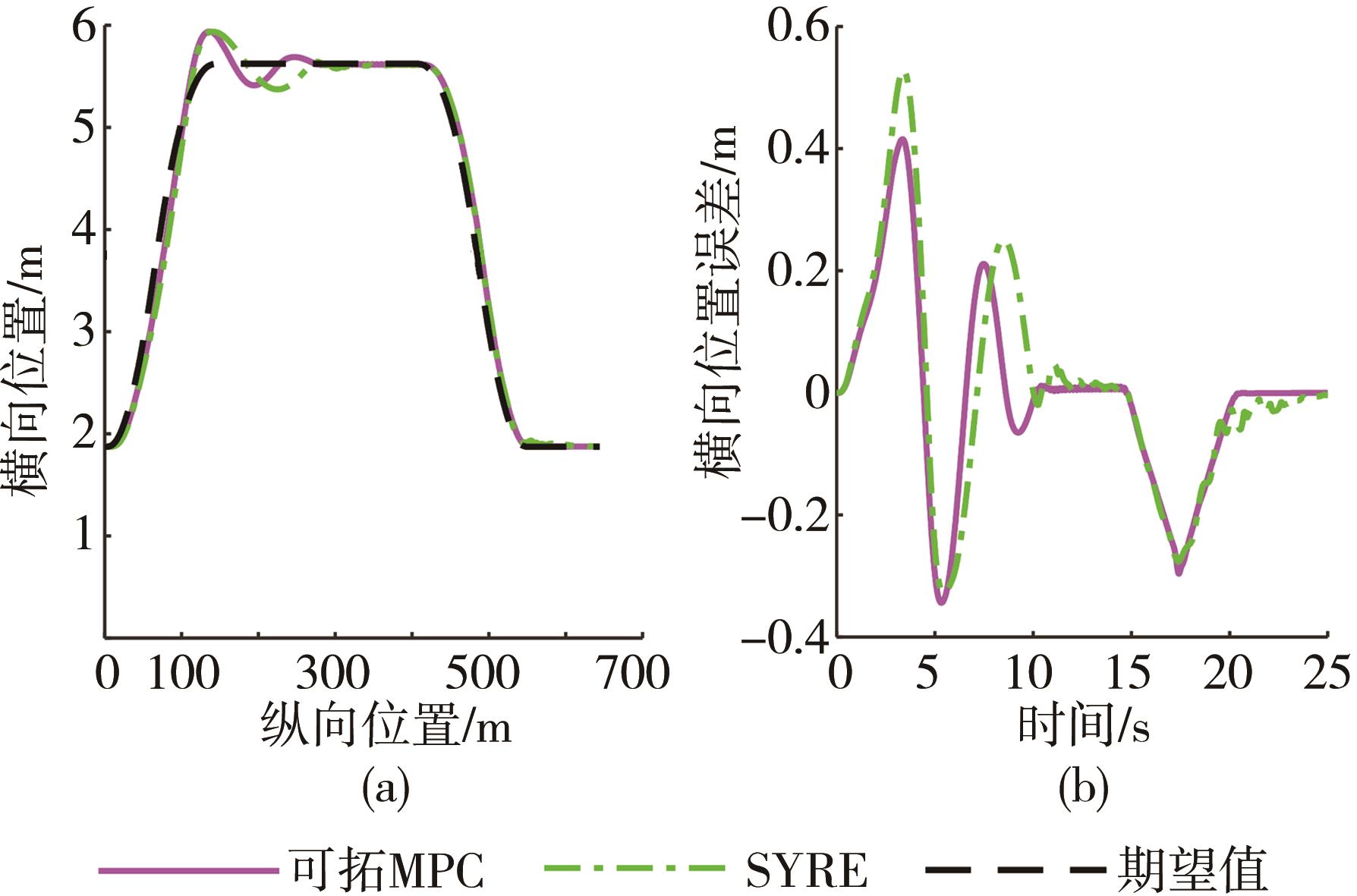

图 10
可拓MPC与SYRE横向稳定性对比"
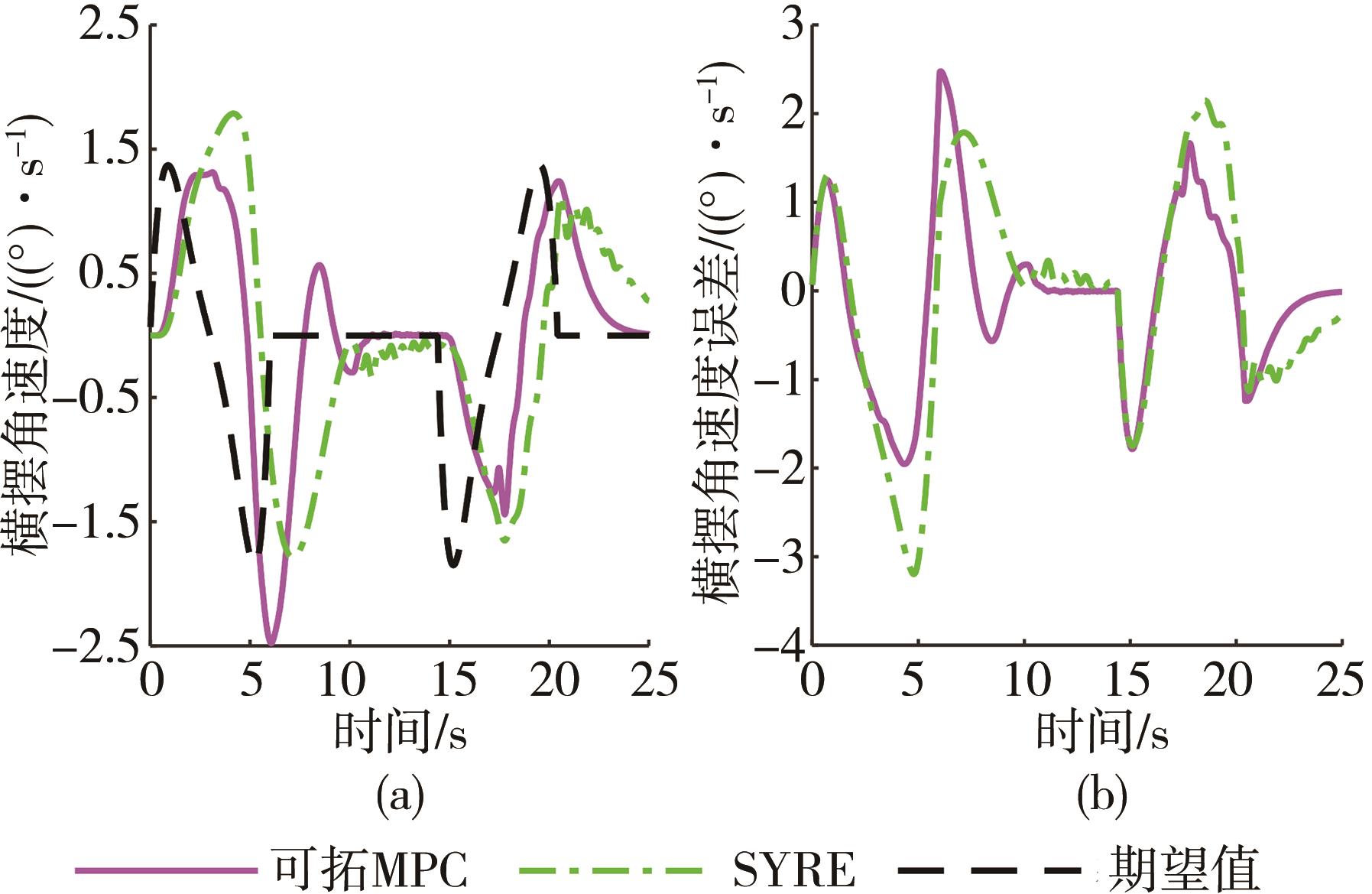
表3
不同控制策略的轨迹跟踪精度和横向稳定性指标对比"
| 路面附着系数 | 控制策略 | 性能指标 | |||
|---|---|---|---|---|---|
| ey?max/m | ey?rms/m | eγ?max/((°)·s-1) | eγ?rms/((°)·s-1) | ||
| μ=0.85 | SMC | 1.35 | 0.59 | 5.42 | 2.51 |
| 单目标MPC | 0.30 | 0.12 | 2.61 | 1.20 | |
| μ=0.3 | SMC | 9.34 | 6.83 | 11.71 | 4.96 |
| 单目标MPC | 0.31 | 0.12 | 4.06 | 1.94 | |
| SYRE | 0.53 | 0.18 | 3.20 | 1.28 | |
| 可拓MPC | 0.41 | 0.11 | 2.48 | 0.95 | |
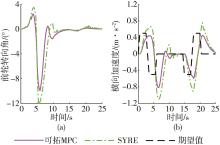
图 11
可拓MPC与SYRE乘坐舒适性对比"
| 1 | BONNEFON J F, SHARIFF A, RAHWAN I. The social dilemma of autonomous vehicles[J]. Science, 2016, 352(6293): 1573-1576. |
| 2 | ZHANG R, ZHANG Z, GUAN Z, et al. Autonomous lane changing control for intelligent vehicles[J]. Cluster Computing, 2019, 22(4): 8657-8667 |
| 3 | 蔡英凤, 臧勇, 孙晓强, 等. 基于可拓切换控制方法的智能车辆车道保持系统研究[J].中国公路学报, 2019, 32(6): 43-52. |
| CAI Y F, ZANG Y, SUN X Q, et al. Lane-keeping system of intelligent vehicle based on extension switching control method[J]. China Journal of Highway and Transport, 2019, 32(6): 43-53. | |
| 4 | DIXIT S, MONTANARO U, DIANATI M, et al. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(6): 2310-2323. |
| 5 | XU L, ZHUANG W, YIN G, et al. Robust overtaking control of autonomous electric vehicle with parameter uncertainties[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(13): 3358-3376. |
| 6 | 冀杰, 唐志荣, 吴明阳, 等. 面向车道变换的路径规划及模型预测轨迹跟踪[J]. 中国公路学报, 2018, 31(4): 176-183. |
| JI J, TANG Z R, WU M Y, et al. Path planning and tracking for lane changing based on model predictive contrl[J]. China Journal of Highway and Transport, 2018, 31(4): 176-183. | |
| 7 | HWANG C L, YANG C C, HUNG J Y. Path tracking of an automatic ground vehicle with different payloads by hierarchical improved fuzzy dynamic sliding-mode control[J]. IEEE Transactions on Fuzzy Systems, 2017, 26(4): 899-914. |
| 8 | 任殿波, 崔胜民, 吴杭哲. 车道保持预瞄控制及其稳态误差分析[J]. 汽车工程, 2016, 38(2): 192-199. |
| REN D B, CUI S M, WU Z H. Preview control for lane keeping and its steady⁃state error analysis[J]. Automotive Engineering, 2016, 38(2): 192-199. | |
| 9 | 杭鹏,陈辛波,张榜,等. 四轮独立转向-独立驱动电动车主动避障路径规划与跟踪控制[J]. 汽车工程,2019, 41(2): 170-176. |
| HANG P, CHEN X B, ZHANG B, et al.Path planning and tracking control for collision avoidance of a 4WIS-4WID electric vehicle[J]. Automotive Engineering, 2019, 41(2): 170-176. | |
| 10 | JI J , KHAJEPOUR A , MELEK W W , et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2):952-964. |
| 11 | 徐兴,卢山峰,陈龙,等. 基于差动和自主转向协调的分布式驱动无人车轨迹跟踪[J].汽车工程, 2018, 40(4): 104-110. |
| XU U, LU S,CHENG L,et al. Self⁃driving vehicle based on coordination between autonomous steering and differential steering[J]. Automotive Engineering, 2018, 40(4): 475-481. | |
| 12 | 陈特, 陈龙, 徐兴, 等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41(10): 1190-1116. |
| CHEN T, CHEN L, XU X,et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41(10): 1190-1116. | |
| 13 | 徐兴, 汤赵, 王峰, 等. 基于变权重系数的分布式驱动无人车轨迹跟踪[J]. 中国公路学报, 2019, 32(12): 36-45. |
| XU X, TANG Z, WANG F, et al. Varied weight coefficients based trajectory tracking of distributed drive self-driving vehicle[J]. China Journal of Highway and Transport, 2019, 32(12): 36-45. | |
| 14 | 许伦辉,胡三根,伍帅,等. 考虑车辆运行特性的双车道超车模型[J].华南理工大学学报(自然科学版), 2015, 43(4): 7-13. |
| XU L H, HU S G, WU S, et al. Overtaking model for two-lane highway considering vehicle running characteristics[J]. Journal of South China University of Technology: Natural Science Edition, 2015, 43(4): 7-13. | |
| 15 | GUO L, GE P, YUE M, et al. Lane changing trajectory planning and tracking controller design for intelligent vehicle running on curved road[J]. Mathematical Problems in Engineering, 2014, 2014: 1-9. |
| 16 | 王家恩, 陈无畏, 王檀彬, 等. 基于期望横摆角速度的视觉导航智能车辆横向控制[J]. 机械工程学报, 2012, 48(4): 108-115. |
| WANG J E, CHEN W W, WANG T B, et al. Vision guided intelligent vehicle lateral control based on desired yaw rate[J]. Journal of Mechanical Engineering, 2012, 48(4): 108-115. | |
| 17 | SUH J, CHAE H, YI K. Stochastic model⁃predictive control for lane change decision of automated driving vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4771-4782. |
| 18 | ZHANG C, CHU D, LIU S, et al. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control[J]. IEEE Intelligent Transportation Systems Magazine, 2019, 11(2): 29-40. |
| 19 | JIE J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 20 | 王其东, 王金波, 陈无畏, 等. 基于汽车行驶安全边界的EPS与ESP协调控制策略[J].机械工程学报, 2016, 52(6): 99-107. |
| WANG Q D, WANG J B, CHEN W W, et al. Coordinated control strategy of EPS and ESP based on vehicle driving safe boundary[J]. Journal of Mechanical Engineering, 2016, 52(6): 99-107. | |
| 21 | 陈无畏,孙晓文,汪洪波. 汽车差动助力转向系统的可拓协调控制[J]. 中国科学: 技术科学, 2017, 47(3): 324-335. |
| CHEN W W, SUN X W, WANG H B. Extension coordinated control of automotive differential drive assisted steering system[J]. Scientia Sinica(Technologica), 2017, 47(3): 324-335. | |
| 22 | 赵治国,周良杰, 朱强. 无人驾驶车辆路径跟踪控制预瞄距离自适应优化[J].机械工程学报, 2018, 54(24): 180-187. |
| ZHAO Z G, ZHOU L J, ZHU Q. Preview distance adaptive optimization for the path tracking control of unmanned vehicle[J]. Journal of Mechanical Engineering, 2018, 54(24): 180-187. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [3] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [4] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [5] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [6] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [7] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [8] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [9] | 周兵,魏佳宝,柴天,吴晓建,王鹤. 基于最优方法的碰后辅助驾驶控制策略[J]. 汽车工程, 2023, 45(4): 561-571. |
| [10] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [11] | 胡满江,牟斌杰,杨泽宇,边有钢,秦晓辉,徐彪. 基于DBSCAN与二分法的混合A*路径规划方法[J]. 汽车工程, 2023, 45(3): 341-349. |
| [12] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [13] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [14] | 贺林,徐子昂,黄春荣,龚超,李书华,石琴. 线控转向系统转角预测滑模控制算法研究[J]. 汽车工程, 2023, 45(12): 2200-2208. |
| [15] | 李琴,汤建明,张博远,陈勇,王勇. 分布式驱动电动汽车多执行器容错控制研究[J]. 汽车工程, 2023, 45(12): 2251-2259. |
|