汽车工程 ›› 2023, Vol. 45 ›› Issue (5): 719-734.doi: 10.19562/j.chinasae.qcgc.2023.05.002
所属专题: 智能网联汽车技术专题-控制2023年
贺伊琳1,马建1( ),杨舒凯2,郑威1,薛启帆1
),杨舒凯2,郑威1,薛启帆1
收稿日期:2022-11-07
修回日期:2022-12-05
出版日期:2023-05-25
发布日期:2023-05-26
通讯作者:
马建
E-mail:majian@chd.edu.cn
基金资助:
Yilin He1,Jian Ma1(),Shukai Yang2,Wei Zheng1,Qifan Xue1
Received:2022-11-07
Revised:2022-12-05
Online:2023-05-25
Published:2023-05-26
Contact:
Jian Ma
E-mail:majian@chd.edu.cn
摘要:
提出了一种融合预瞄特性的智能电动汽车稳定性前馈+反馈控制方法。建立车辆预瞄模型,通过汽车在环境感知时的前视行为,引入道路曲率作为车辆动力学特性的影响因素。基于在前视信息指导下的车辆位姿变化,根据道路附着能力和车速指数模型描述期望纵向车速,建立轮胎侧偏刚度补偿的稳定性前馈控制方法。同时,采用模型预测控制(MPC)设计稳定性反馈控制律,根据车辆的预瞄信息自适应调整预测模型参数和预测时间,消除前馈控制误差及路面扰动等不确定性因素带来的影响。研究结果表明,本文提出的控制策略下汽车质心侧偏角、横摆角速度和侧向加速度小,且跟踪精度更高。仿真试验中,相比于无控制、MPC反馈控制与前馈+定参数MPC反馈控制,本文提出的控制策略在双移线工况1下质心侧偏角峰值分别减小了41.3%、28.9%和10.0%,横摆角速度峰值分别减小了18.0%、6.7%和2.0%,双移线工况2下质心侧偏角峰值分别减小了27.2%、8.7%和8.0%,横摆角速度峰值分别减小了16.9%、12.9%和8.6%;相比于MPC反馈控制与前馈+定参数MPC反馈控制,在蛇行工况1下,质心侧偏角峰值分别减小了49.8%与34.8%,横摆角速度峰值分别减小了21.8%与12.7%;在蛇行工况2下,质心侧偏角峰值分别减小了36.6%和18.6%,横摆角速度峰值分别减小了17.7%和12.4%。
贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734.
Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics[J]. Automotive Engineering, 2023, 45(5): 719-734.
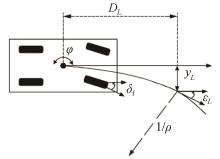
图 1
车辆预瞄模型"
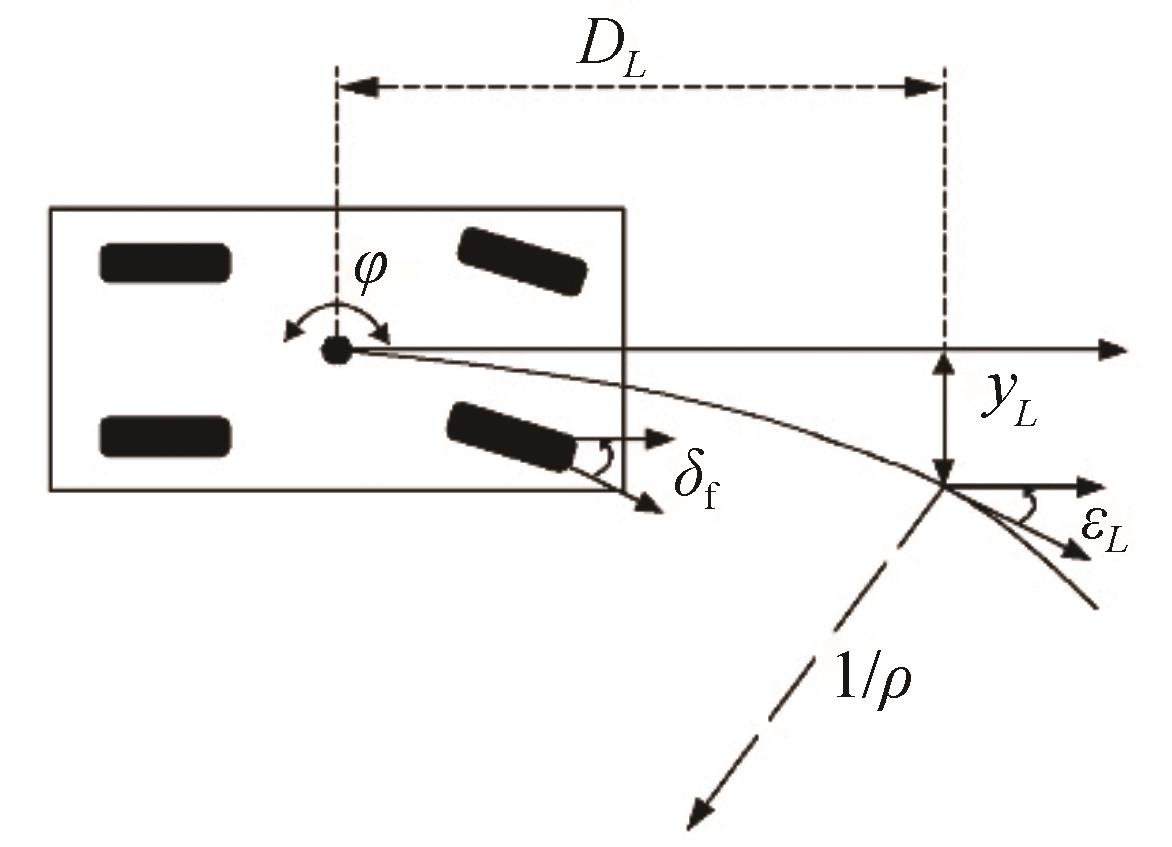
图 2
车辆加速度规划模型"


图 3
前馈+反馈稳定性控制架构"
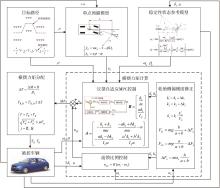
图 4
模型预测反馈控制逻辑"

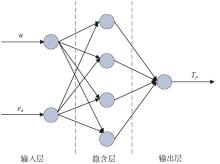
图 5
BP神经网络结构图"
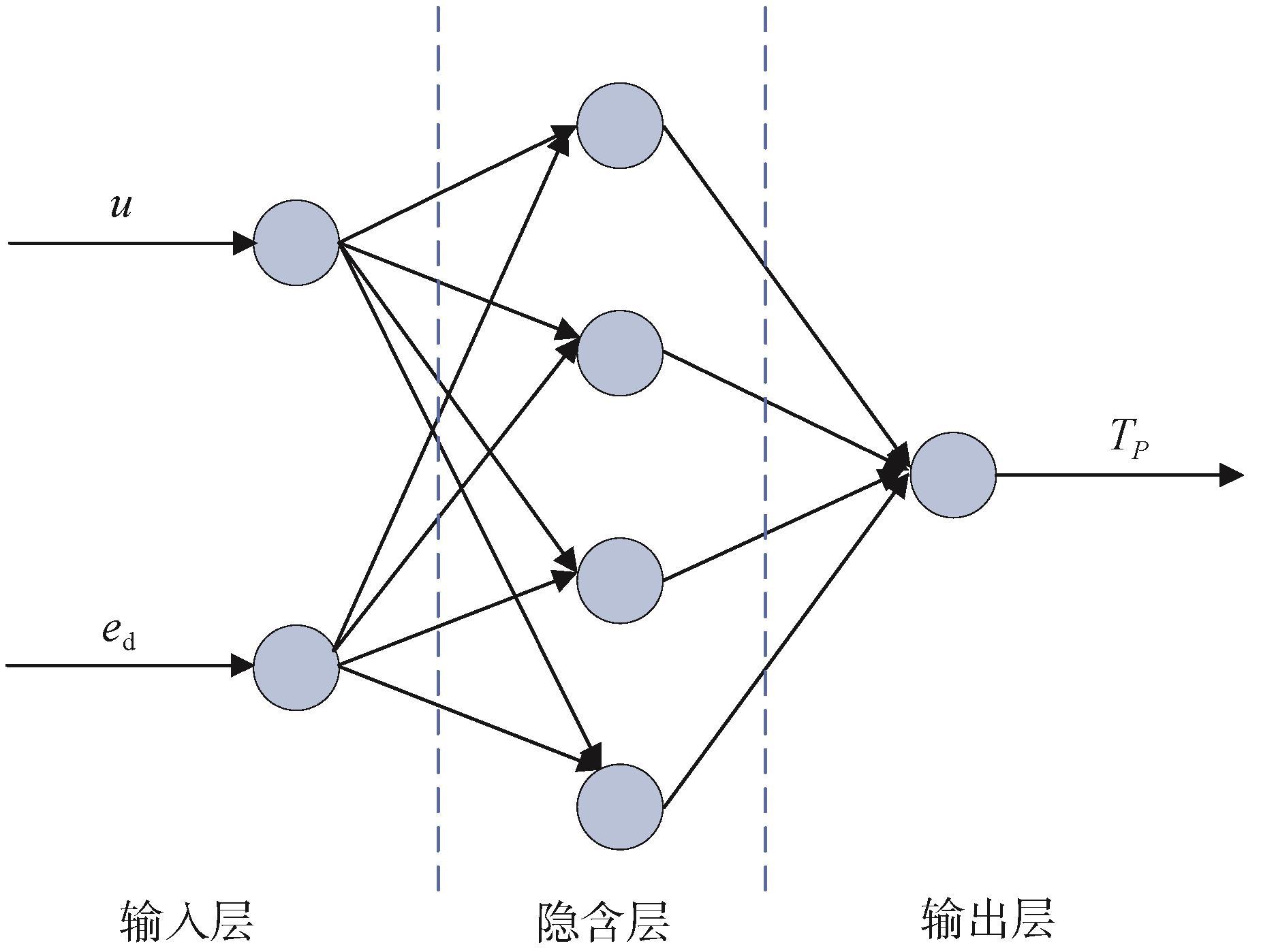

图 6
联合仿真逻辑框图"
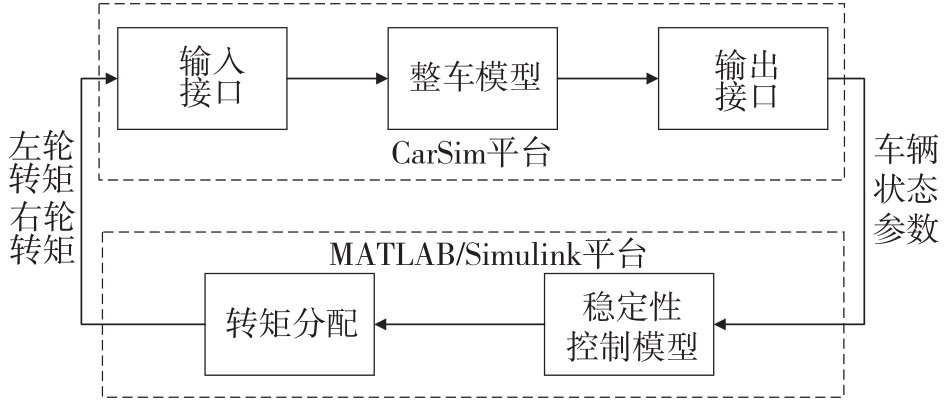
表 1
整车参数表"
| 参数 | 数值 |
|---|---|
| 整备质量/kg | 1 250 |
| 轴距/m | 2.910 |
| 质心到前轴距离/m | 1.015 |
| 质心到后轴距离/m | 1.895 |
| 质心高度/m | 0.540 |
| 绕z轴转动惯量/(kg·m2) | 1 536.7 |
| 前轮侧偏刚度/(N·rad-1) | -76 000 |
| 后轮侧偏刚度/(N·rad-1) | -110 100 |
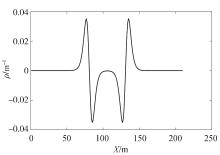
图 7
双移线轨迹曲率"
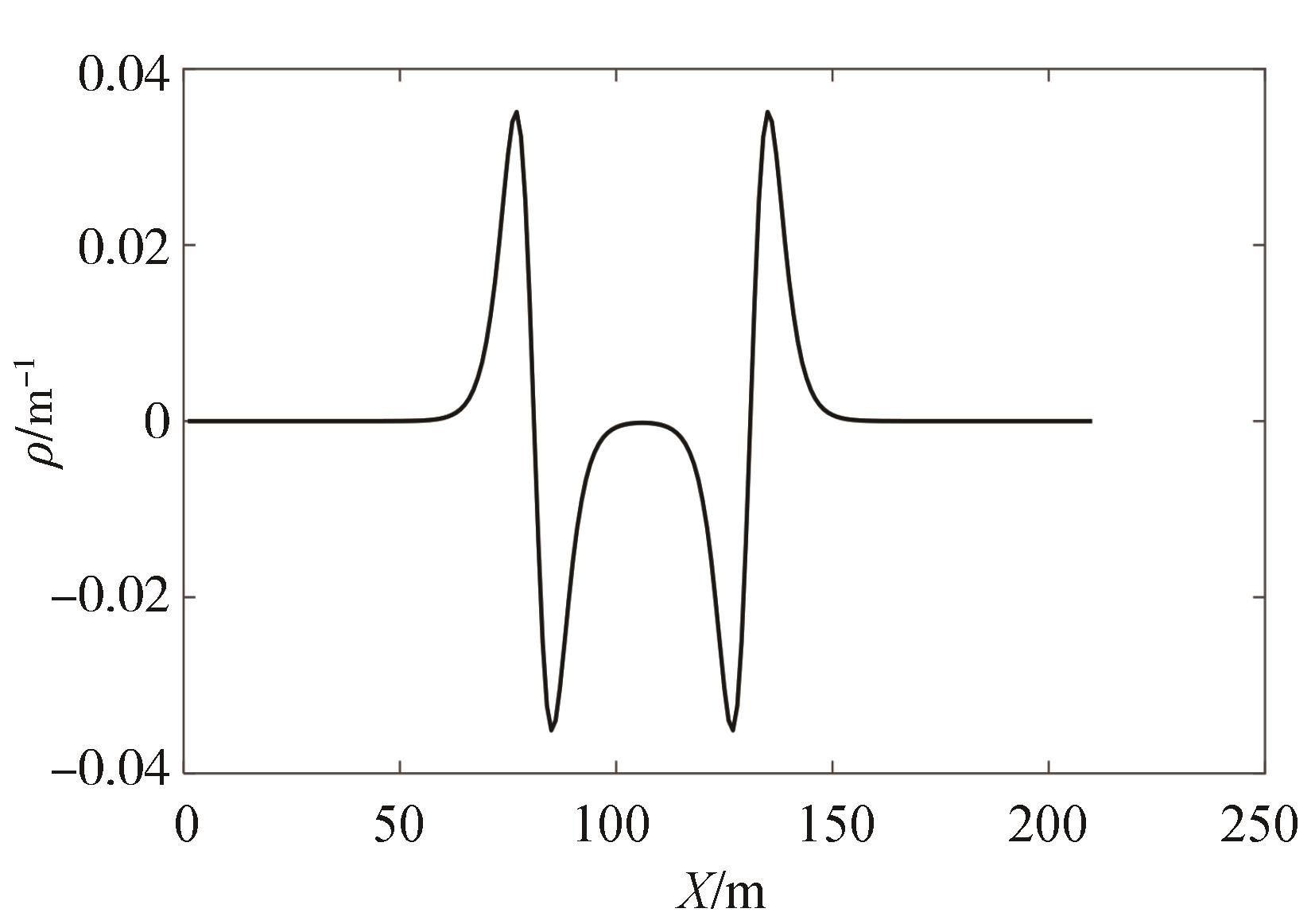

图 8
双移线工况:车速90 km/h,路面附着系数0.6"


图 9
双移线工况:车速120 km/h,路面附着系数0.85"

表 2
双移线工况下不同控制策略稳定性仿真结果对比"
| 状态参数 | 项目 | 双移线工况:u=90 km/h,μ=0.6 | 双移线工况:u=120 km/h,μ=0.85 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 无控制 | 反馈 控制 | 前馈+定参数MPC | 前馈+自适应参数MPC | 无控制 | 反馈 控制 | 前馈+定参数MPC | 前馈+自适应参数MPC | ||
| 质心侧偏角 | 峰值 | 0.92° | 0.76° | 0.60° | 0.54° | 1.73° | 1.38° | 1.37° | 1.26° |
| 降低百分比 | 41.3% | 28.9% | 10.0% | 27.2% | 8.7% | 8.0% | |||
| 横摆角速度 | 峰值 | -11.75°/s | -10.33°/s | -9.84(°)/s | -9.64(°)/s | -12.94(°)/s | -12.34(°)/s | -11.76(°)/s | -10.75(°)/s |
| 降低百分比 | 18.0% | 6.7% | 2.0% | 16.9% | 12.9% | 8.6% | |||
| 侧向加速度 | 峰值 | -0.45g | -0.43g | -0.39g | -0.35g | -0.69g | -0.68g | -0.66g | -0.58g |
| 降低百分比 | 22.2% | 18.6% | 10.3% | 15.9% | 14.7% | 12.1% | |||
图 10
蛇行轨迹曲率"

图 11
蛇行工况:车速90 km/h,路面附着系数0.6"
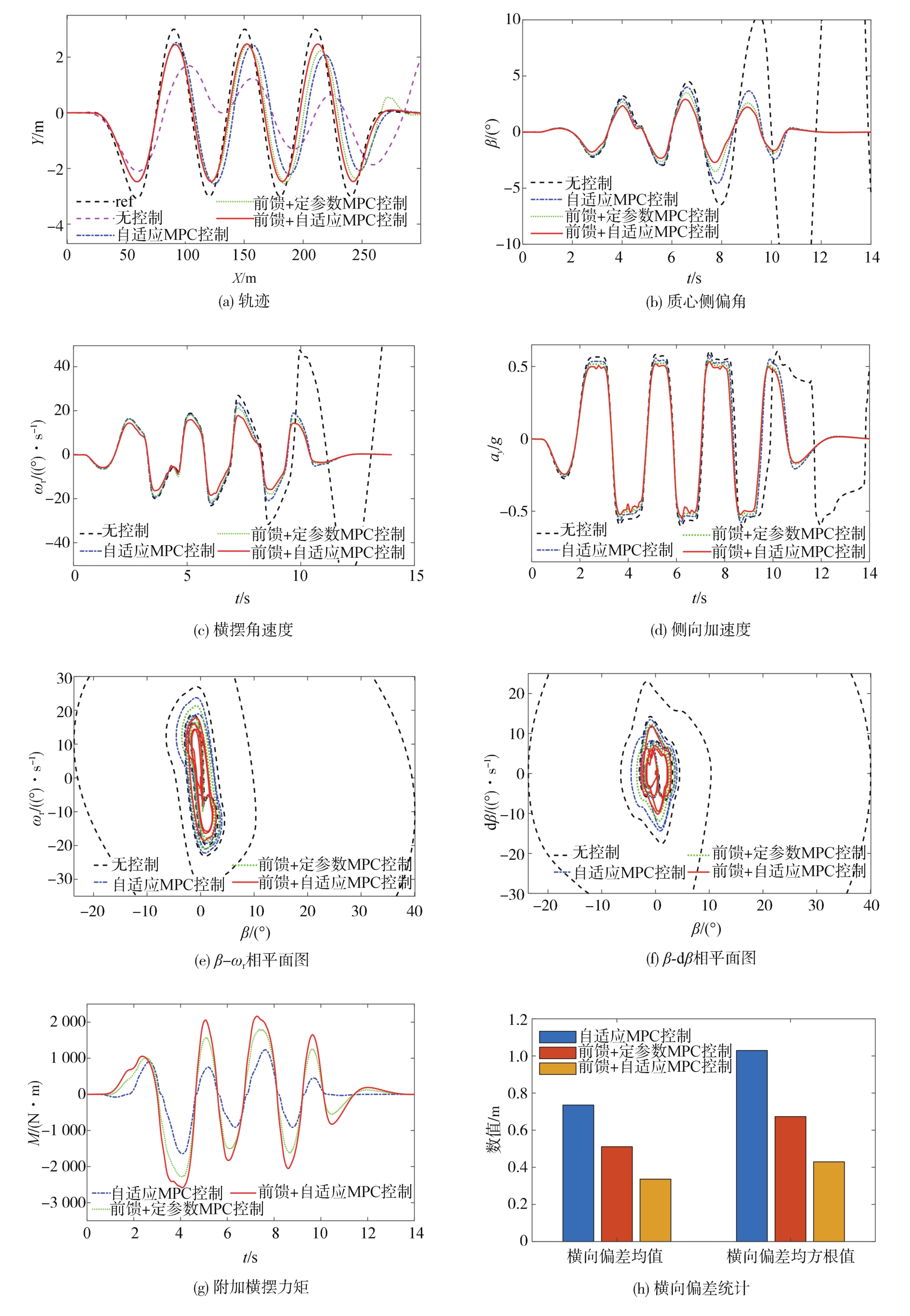

图 12
蛇行工况:车速120 km/h,路面附着系数0.85"
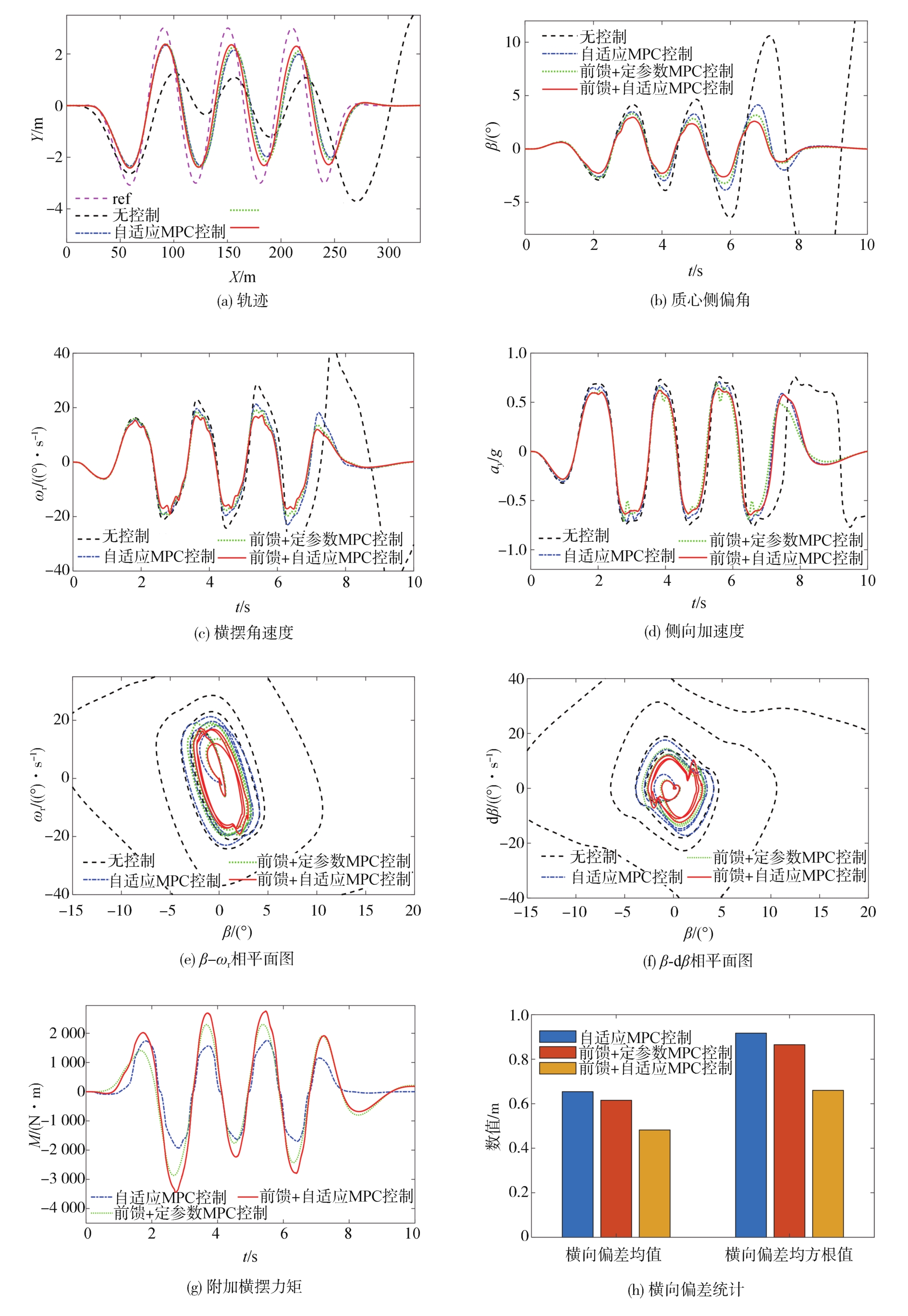
表 3
蛇行工况下不同控制策略的稳定性仿真结果对比"
| 状态参数 | 项目 | 蛇行工况:90 km/h,μ=0.6 | 蛇行工况:120 km/h,μ=0.85 | ||||
|---|---|---|---|---|---|---|---|
| 反馈控制 | 前馈+定参数MPC | 前馈+自适应 参数MPC | 反馈控制 | 前馈+定参数MPC | 前馈+自适应 参数MPC | ||
| 质心侧偏角 | 峰值 | -4.57° | -3.51° | -2.29° | -4.13° | -3.22° | -2.62° |
| 降低百分比 | 49.8% | 34.8% | 36.6% | 18.6% | |||
| 横摆角速度 | 峰值 | 23.66(°)/s | 21.19(°)/s | 18.50(°)/s | -20.95(°)/s | -19.69(°)/s | -17.24(°)/s |
| 降低百分比 | 21.8% | 12.7% | 17.7% | 12.4% | |||
| 侧向加速度 | 峰值 | 0.58g | 0.55g | 0.53g | -0.70g | -0.69g | -0.65g |
| 降低百分比 | 8.6% | 3.6% | 7.1% | 5.8% | |||
| 1 | 梁旺,秦兆博,陈亮,等.基于改进BP神经网络的智能车纵向控制方法[J].汽车工程,2022,44(8):1162-1172. |
| LIANG W, QIN Z B, CHEN L, et al. Longitudinal control method of intelligent vehicles based on the improved BP neural network[J]. Automotive Engineering, 2022,44(8):1162-1172. | |
| 2 | LENG Z, MINOR M A. Curvature-based ground vehicle control of trailer path following considering sideslip and limited steering actuation[J]. IEEE Transactions on Intelligent Transportation Systems, 2017,18(2):332-348. |
| 3 | 陈龙, 解云鹏, 蔡英凤,等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程, 2020, 42(8):1016-1026. |
| CHEN L, XIE Y P, CAI Y F, et al. Stable tracking control of autonomous vehicles at extreme conditions[J]. Automotive Engineering, 2020, 42(8): 1016-1026. | |
| 4 | CHENG Z, LU Z. Research on the PID control of the ESP system of tractor based on improved AFSA and improved SA[J]. Computers and Electronics in Agriculture, 2018, 148:142-147. |
| 5 | 安伟彪. 分布式驱动电动汽车轨迹跟踪与稳定性集成控制研究[D]. 桂林: 桂林电子科技大学,2021. |
| AN W B. Research on trajectory tracking and stability integrated control of distributed drive electric vehicle[D]. Guilin: Guilin University of Electronic Technology, 2021. | |
| 6 | 夏万林. 智能分布式驱动电动汽车动力学控制方法研究[D].重庆: 重庆理工大学,2018. |
| XIA W L. Research on dynamics control method of intelligent distributed drive electric vehicle[D]. Chongqing: Chongqing University of Technology, 2018. | |
| 7 | LING L, LU Y, WANG R, et al. A three-dimensional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC[J]. Industrial Electronics, IEEE Transactions on, 2017, 64(4):3389-3401. |
| 8 | 陈特,陈龙,徐兴,等.分布式驱动无人车路径跟踪与稳定性协调控制[J].汽车工程,2019,41(10):1109-1116. |
| CHEN T, CHEN L, XU X, et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019,41(10):1109-1116. | |
| 9 | GUO J, LUO Y, LI K, et al. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation[J]. Mechanical Systems and Signal Processing, 2018, 105(15):183-199. |
| 10 | 丁代林. 无人驾驶车辆轨迹跟踪控制及其稳定性研究[D]. 重庆: 重庆理工大学,2022. |
| DING D L. Research on trajectory tracking control and stability of unmanned vehicle[D]. Chongqing: Chongqing University of Technology, 2022. | |
| 11 | GASMI A, BOUDALI M T, ORJUELA R, et al. Multi-criteria stability combination for yaw stability control of autonomous vehicles-ScienceDirect[J]. IFAC-Papers On Line, 2019, 52(5):465-470. |
| 12 | 金辉,李世杰.基于极限车速的车辆稳定性控制研究[J].汽车工程,2018,40(1):48-56. |
| JIN H, LI S J. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018,40(1):48-56. | |
| 13 | 贺伊琳,马建,赵轩,等.基于小波控制的电动汽车稳定性研究[J].中国公路学报,2018,31(11):214-226. |
| HE Y L, MA J, ZHAO X, et al. Research on wavelet control based stability of the electric vehicle[J]. China Journal of Highway and Transport, 2018,31(11):214-226. | |
| 14 | WANG Z, WANG Y, ZHANG L, et al. Vehicle stability enhancement through hierarchical control for a four-wheel-independently-actuated electric vehicle[J]. Energies, 2017,10(7): 947-964. |
| 15 | NOVELLIS L D, SORNIOTTO A, GRUBER P, et al. Direct yaw moment control actuated through electric drivetrains and friction brakes: theoretical design and experimental assessment[J]. Mechatronics, 2015,26:1-15. |
| 16 | ZHANG L, CHEN H, HUANG Y, et al. Model predictive control for integrated longitudinal and lateral stability of electric vehicles with in-wheel motors[J]. IET Control Theory and Applications, 2020, 14(18):2741-2751. |
| 17 | SHUAI Z B, ZHANG H, WANG J M, et al. Combined AFS and DYC control of four-wheel-independent-drive electric vehicles over CAN network with time-varying delays[J]. IEEE Transactions on Vehicular Technology, 2014,63(2): 591–602. |
| 18 | JIN X J, YU Z T, YIN G D, et al. Improving vehicle handling stability based on combined AFS and DYC system via robust takagi-sugeno fuzzy control[J]. IEEE Transactions on Intelligent Transportation Systems, 2018,19(8): 2696–2707. |
| 19 | YOUSSFI N E, BACHTIRI R E, CHAIBI R, et al. Static output-feedback H ∞ control for T-S fuzzy vehicle lateral dynamics[J]. SN Applied Science, 2020, 2(1),101. |
| 20 | JALALI M, KHORSRAVANI S, KHAJEPOUR A, et al. Model predictive control of vehicle stability using coordinated active steering and differential brakes[J]. Mechatronics, 2017, 48:30-41. |
| 21 | REN B, HONG C, ZHAO H, et al. MPC-based yaw stability control in in-wheel-motored EV via active front steering and motor torque distribution[J]. Mechatronics, 2016, 38:103-114. |
| 22 | ZHANG L, DING H, GUO K, et al. Cooperative chassis control system of electric vehicles for agility and stability improvements[J]. IET Intelligent Transport Systems, 2019,13:134-140. |
| 23 | SHI K, YUAN X F, HUANG G M, et al. MPC-based compensation control system for the yaw stability of distributed drive electric vehicle[J]. International Journal of Systems Science: The Theory and Practice of Mathematical Modelling, Simulation, Optimization and Control in Relation to Biological, Economic, Industrial and Transportation Systems, 2018,49(8):1795-1808. |
| 24 | HU J Y, LI J Q, LI H. Feedforward and feedback integrated control for handling characteristics adjustment of multi-axle heavy-duty vehicles using independent-drive electric wheels[C]. 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), 2021. |
| 25 | 刁勤晴, 张雅妮, 朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J]. 中国机械工程, 2019, 30(12):8. |
| DIAO Q Q, ZHANG Y N, ZHU L Y. A lateral and longitudinal fuzzy control of intelligent vehicles with double preview points for large curvature roads[J]. China Mechanical Engineering, 2019, 30(12):8. | |
| 26 | HOU R, ZHAI L, SUN T, et al. Steering stability control of a four in-wheel motor drive electric vehicle on a road with varying adhesion coefficient[J]. IEEE Access, 2019:32617-32627. |
| 27 | 汪若尘, 魏振东,叶青, 等.视觉预瞄式智能车辆纵横向协同控制研究[J].汽车工程,2019,41(8):763-770,830. |
| WANG R C,WEI Z D,YE Q, et al. A research on visual preview longitudinal and lateral cooperative control of intelligent vehicle[J]. Automotive Engineering, 2019,41(8):763-770,830. | |
| 28 | 黄鹤. 汽车稳定性控制系统分层优化控制研究[D]. 合肥: 合肥工业大学,2012. |
| HUANG H. Study of electronic stability control based on layered optimization[D]. Hefei: Hefei University of Technology, 2012. | |
| 29 | CHEN B C, TSAI C T, LEE K. Path-following steering controller of automated lane change system with adaptive preview time[C]. IEEE International Conference on Systems.IEEE,2016. |
| 30 | 陈力, 殷时蓉, 罗天洪, 等. 基于BP神经网络的智能车辆换道决策模型研究[J].汽车工程学报,2022,12(1):83-89. |
| CHEN L,YIN S R,LUO T H, et al. Research on lane-changing decision model for intelligent vehicles based on BP neural network[J]. Chinese Journal of Automotive Engineering, 2022,12(1):83-89. |
| [1] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [2] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [3] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [4] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [5] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [6] | 周兵,魏佳宝,柴天,吴晓建,王鹤. 基于最优方法的碰后辅助驾驶控制策略[J]. 汽车工程, 2023, 45(4): 561-571. |
| [7] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [8] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [9] | 贺林,徐子昂,黄春荣,龚超,李书华,石琴. 线控转向系统转角预测滑模控制算法研究[J]. 汽车工程, 2023, 45(12): 2200-2208. |
| [10] | 胡丹丹,尹鹏飞,牛国臣,赵金聚. 非结构化道路下离轴式拖挂车辆主动避障控制研究[J]. 汽车工程, 2023, 45(12): 2318-2329. |
| [11] | 宋强,王冠峰,商赫,张念忠. 基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究[J]. 汽车工程, 2023, 45(11): 2104-2112. |
| [12] | 芦勇,何一超,田贺,江昆,杨殿阁. 面向量产的自适应巡航控制系统纵向加速度规划方法研究[J]. 汽车工程, 2023, 45(10): 1803-1814. |
| [13] | 徐璞磊,蔡英凤,廉玉波,孙晓强,王海,陈龙,钟益林. 基于改进分层可拓理论的智能汽车AFS/DYC协调控制[J]. 汽车工程, 2023, 45(1): 20-31. |
| [14] | 林程,梁晟,宫新乐,于潇,汪博文. 面向极限工况的分布式驱动电动汽车动力学集成控制方法[J]. 汽车工程, 2022, 44(9): 1372-1385. |
| [15] | 解少博,屈鹏程,李嘉诚,王惠庆,郎昆. 跟驰场景中网联混合电动货车速度规划和能量管理协同控制的研究[J]. 汽车工程, 2022, 44(8): 1136-1143. |
|