汽车工程 ›› 2023, Vol. 45 ›› Issue (1): 20-31.doi: 10.19562/j.chinasae.qcgc.2023.01.003
所属专题: 智能网联汽车技术专题-控制2023年
徐璞磊1,蔡英凤1( ),廉玉波2,孙晓强1,王海3,陈龙1,钟益林2
),廉玉波2,孙晓强1,王海3,陈龙1,钟益林2
收稿日期:2022-07-31
修回日期:2022-08-23
出版日期:2023-01-25
发布日期:2023-01-18
通讯作者:
蔡英凤
E-mail:caicaixiao0304@126.com
基金资助:
Pulei Xu1,Yingfeng Cai1(),Yubo Lian2,Xiaoqiang Sun1,Hai Wang3,Long Chen1,Yilin Zhong2
Received:2022-07-31
Revised:2022-08-23
Online:2023-01-25
Published:2023-01-18
Contact:
Yingfeng Cai
E-mail:caicaixiao0304@126.com
摘要:
针对紧急避障及大曲率工况的稳定控制难题,提出基于改进分层可拓理论的AFS和DYC协调控制系统,引入了鲸鱼算法解决了可拓边界的自适应划分问题,既简化了分层可拓理论的边界确定过程,又遏制了控制器的一些较为强烈的输出振荡,显著提高了车辆控制的稳定性和安全性。所提AFS/DYC协调控制系统分上下两层,上层是改进分层可拓协调模块,下层是AFS/DYC控制器模块。上层可拓协调模块主要通过横摆角速度、纵向车速以及规划路径曲率来确定AFS和DYC的权重系数,下层控制器模块主要通过上层协调模块确定的权重系数来分配AFS和DYC的输出量,最终实现对智能车辆的稳定性控制。Carsim和Simulink联合仿真结果表明,所提协调控制系统在紧急避障、双移线等大曲率及曲率突变工况下,对横摆角速度和纵向车速的控制效果相较于分层可拓控制、普通可拓控制均有较大提升。
徐璞磊,蔡英凤,廉玉波,孙晓强,王海,陈龙,钟益林. 基于改进分层可拓理论的智能汽车AFS/DYC协调控制[J]. 汽车工程, 2023, 45(1): 20-31.
Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory[J]. Automotive Engineering, 2023, 45(1): 20-31.
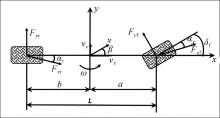
图1
2自由度车辆动力学模型"
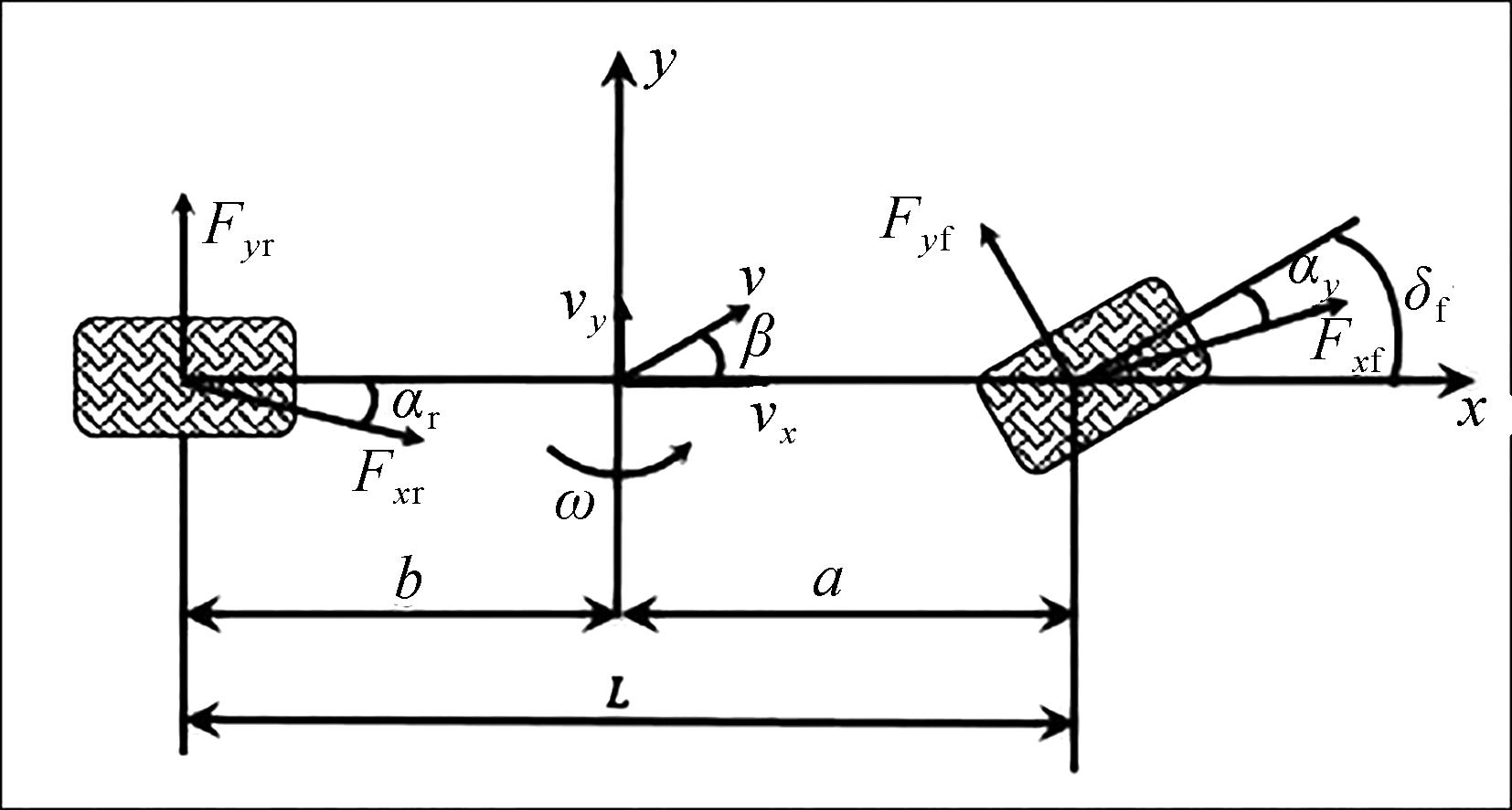
图2
7自由度车辆动力学模型"
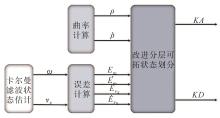
图3
改进分层可拓协调模块"
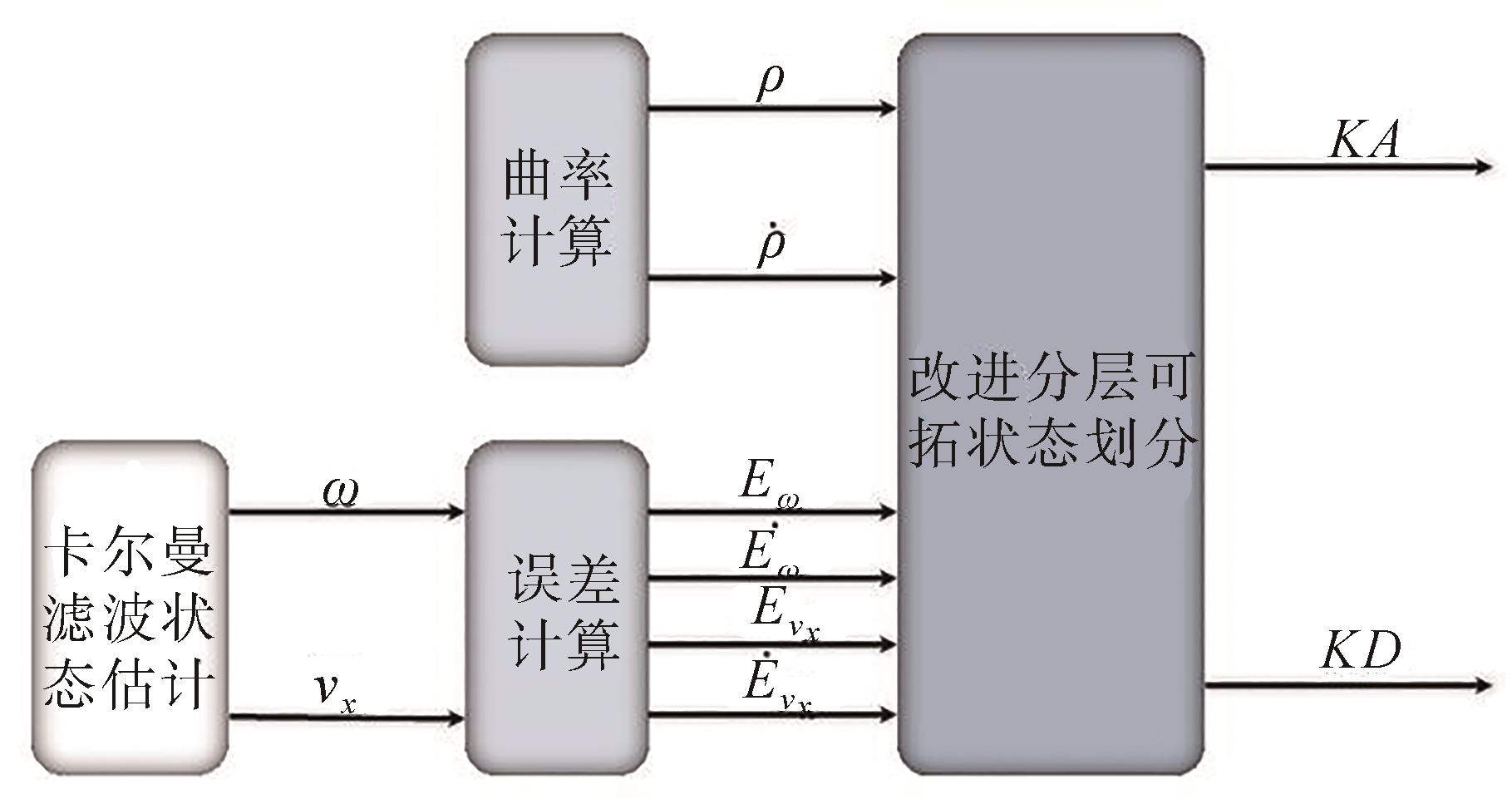
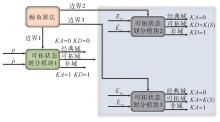
图4
改进分层可拓状态划分结构图"
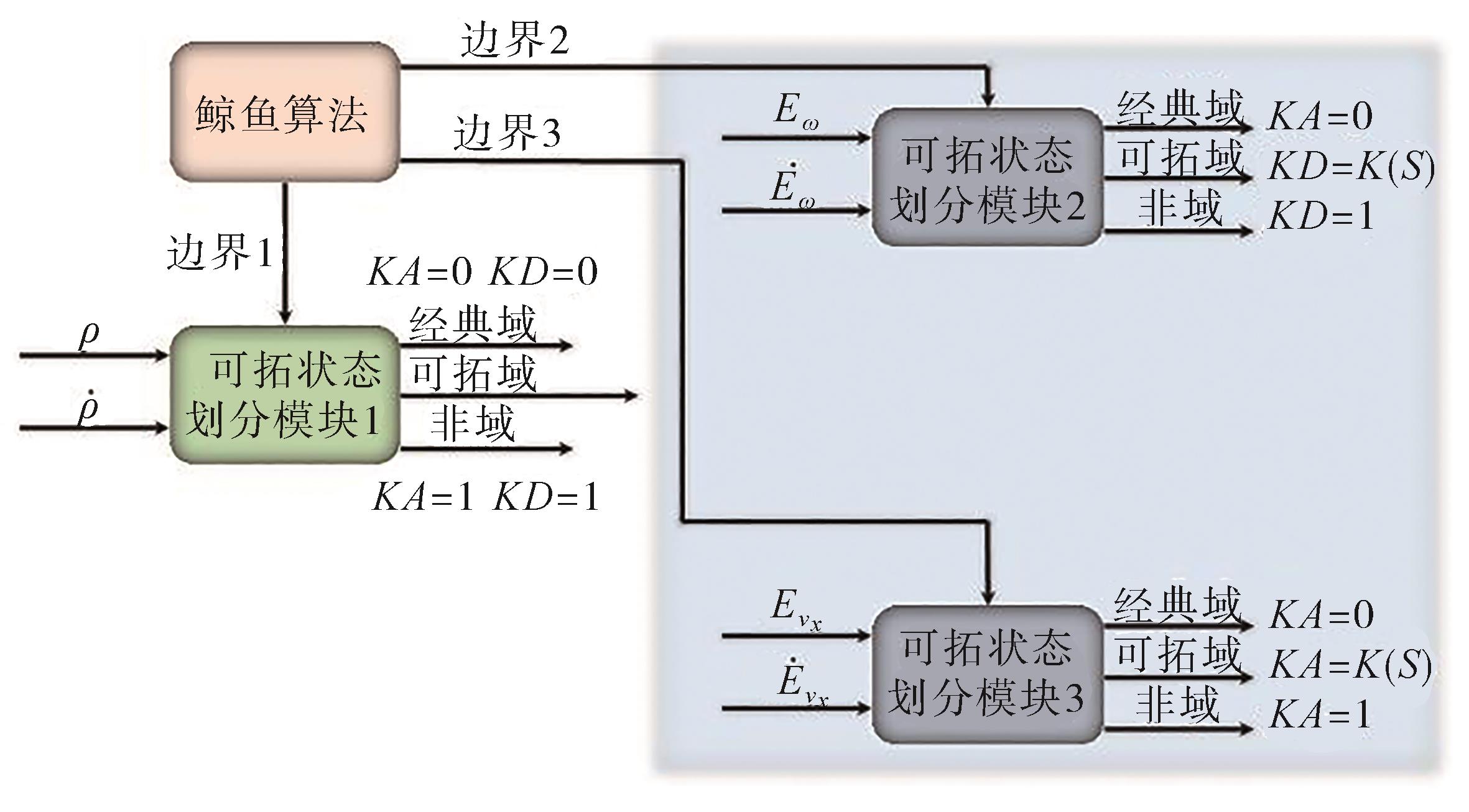
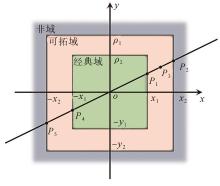
图5
二维可拓集合"
图6
鲸鱼捕食图"
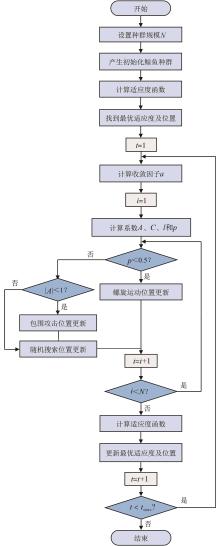
图7
鲸鱼算法流程图"

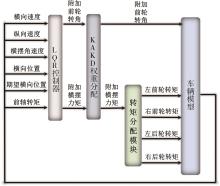
图8
下层控制系统结构图"
表1
车辆参数值"
| 参数 | 数值(单位) | 参数 | 数值(单位) |
|---|---|---|---|
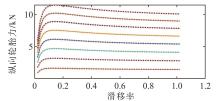
图9
纵向轮胎力拟合图"
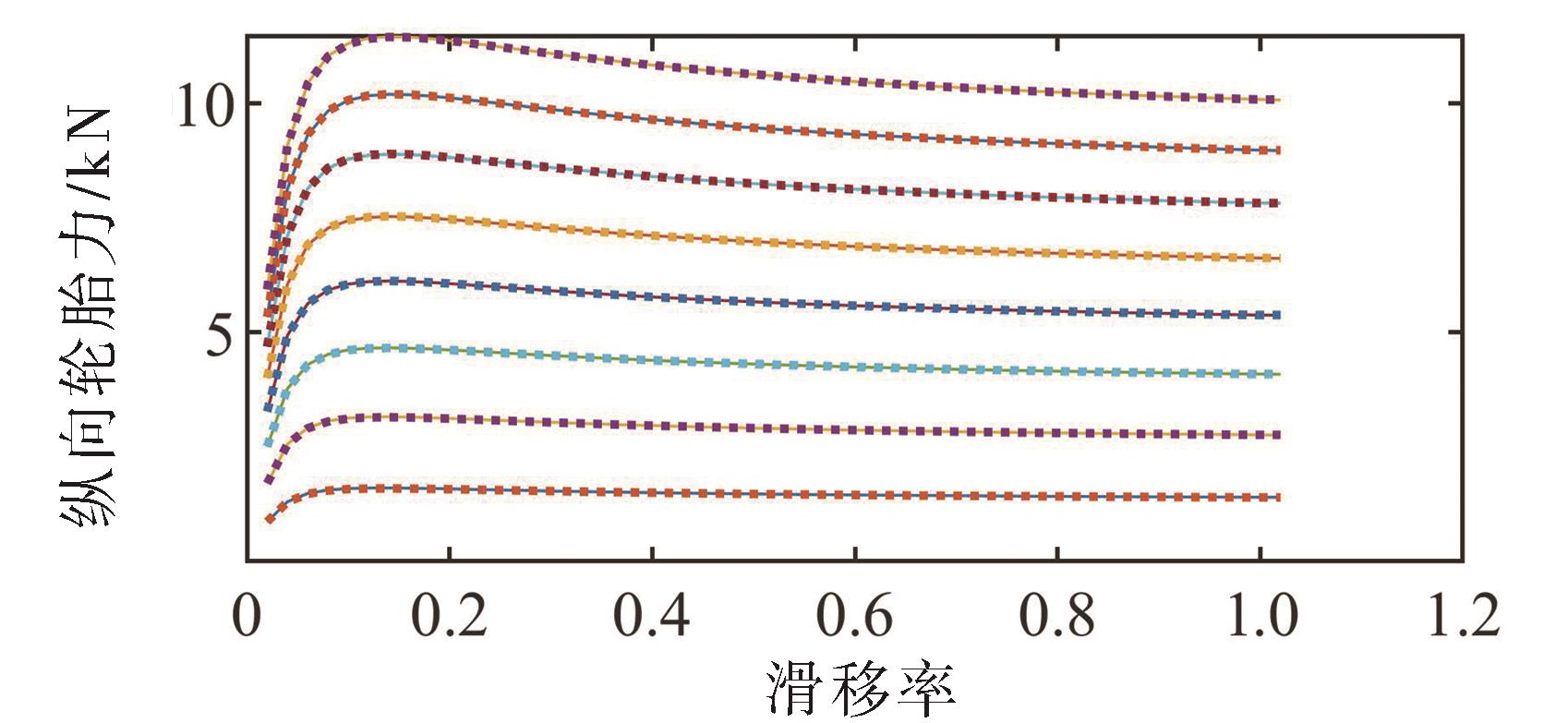
图10
侧向轮胎力拟合图"
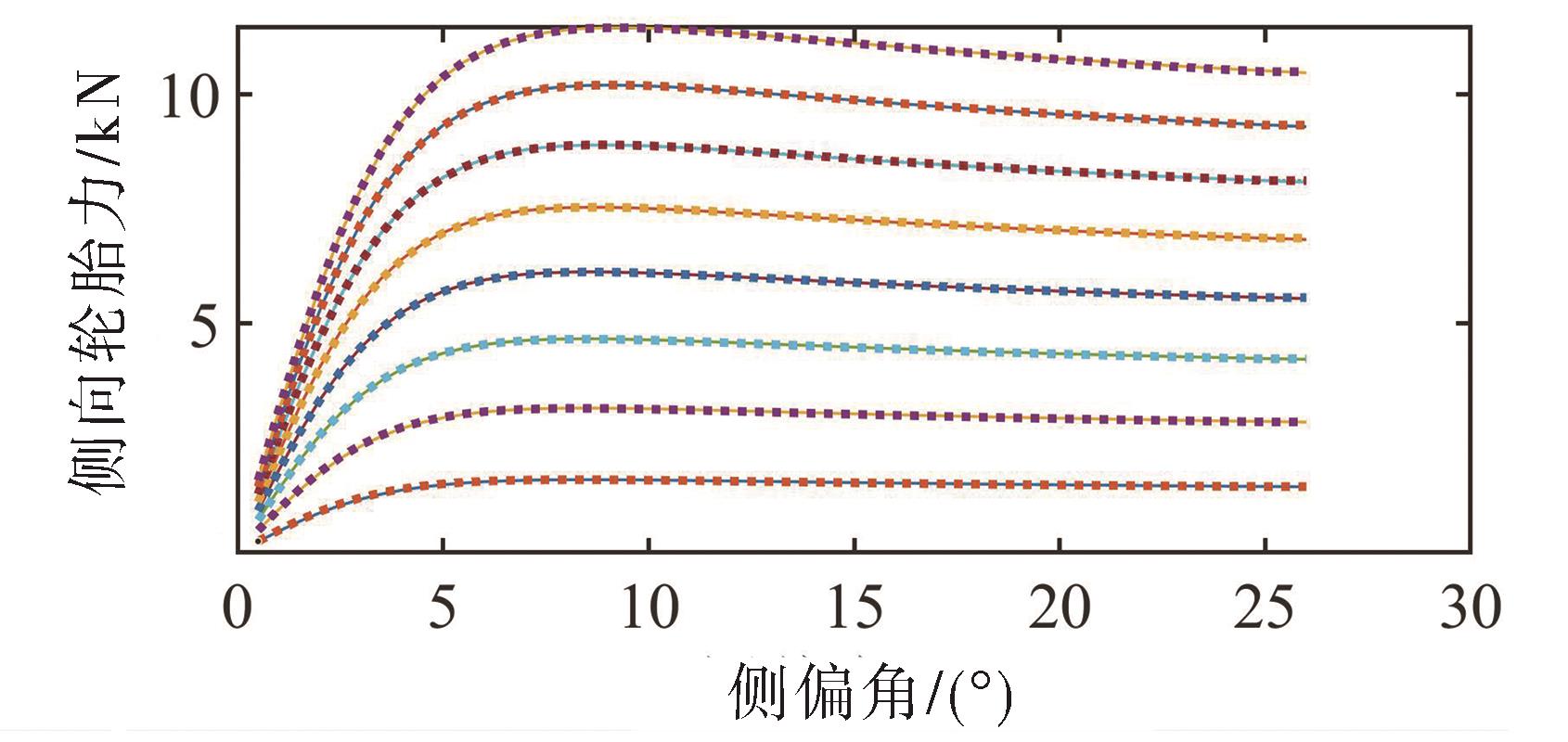
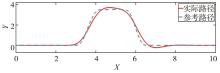
图11
双移线工况路径跟踪图"
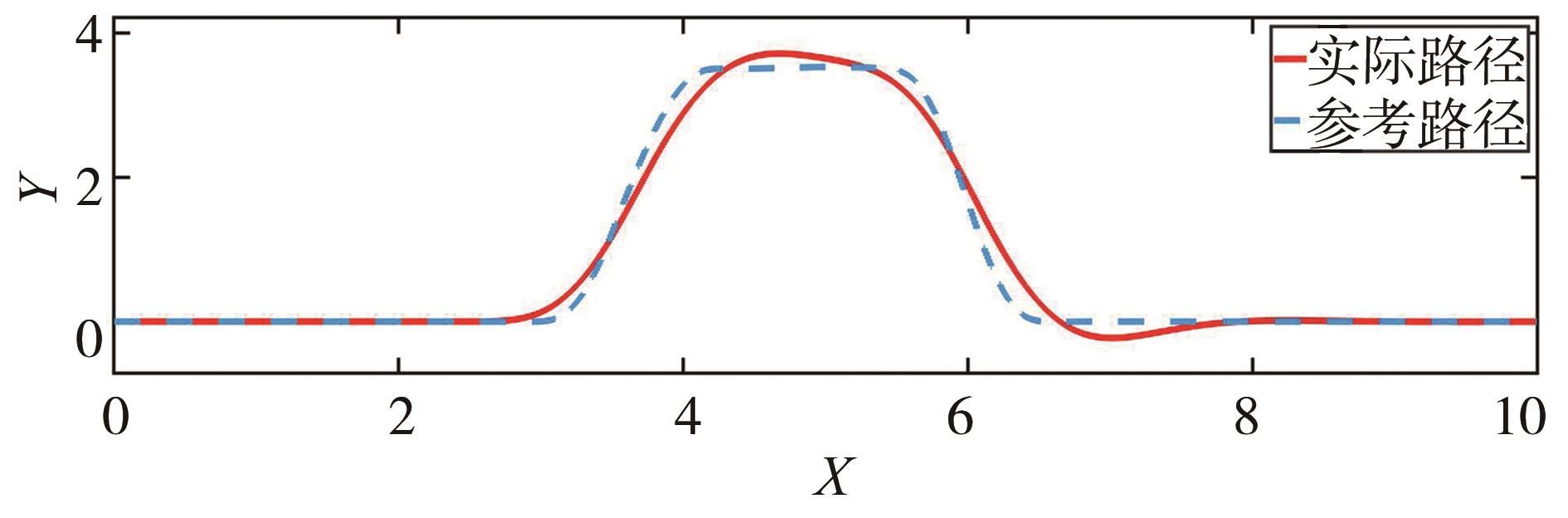
图12
鲸鱼算法迭代图"
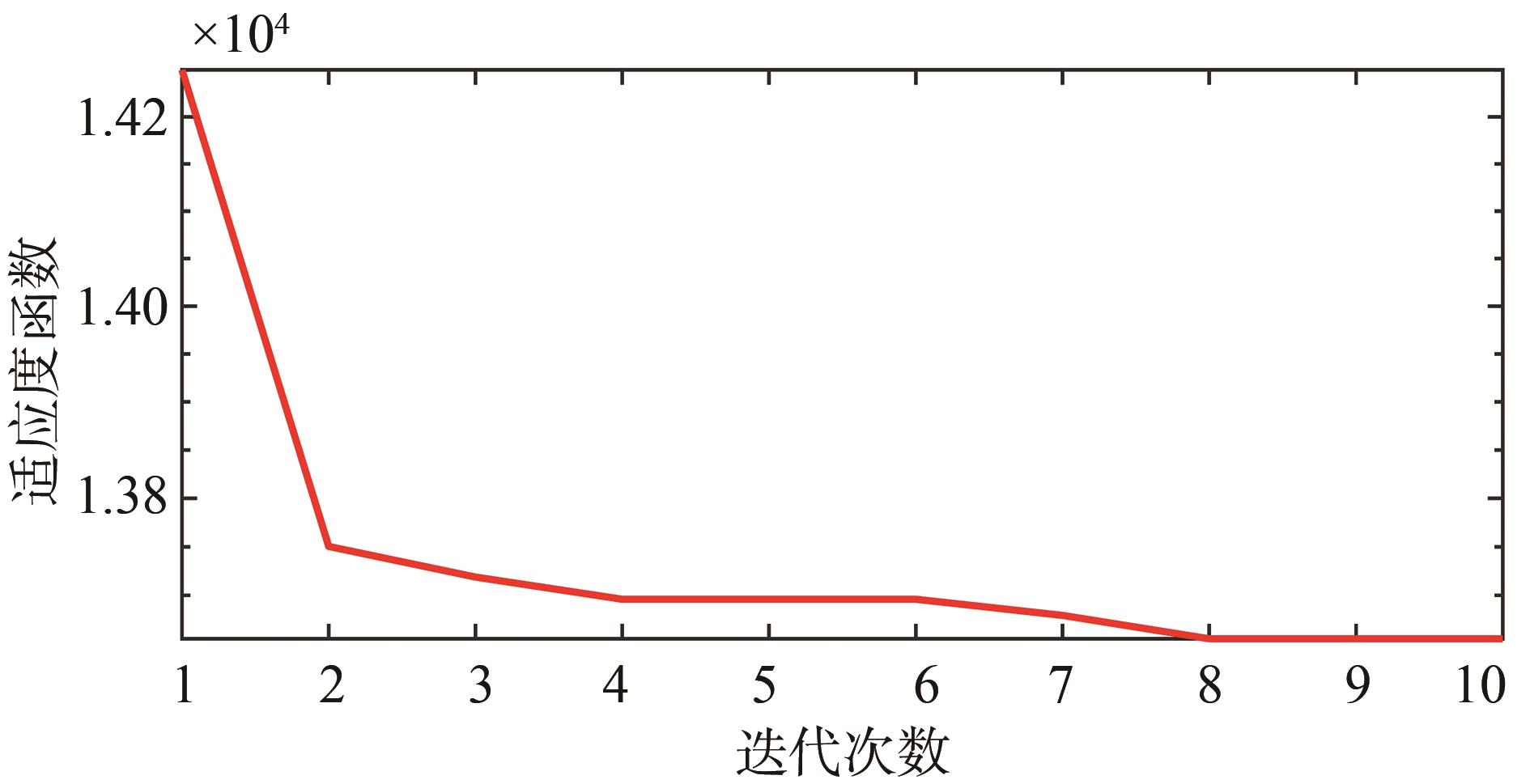
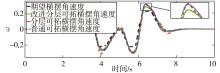
图13
双移线工况横摆角速度对比图"
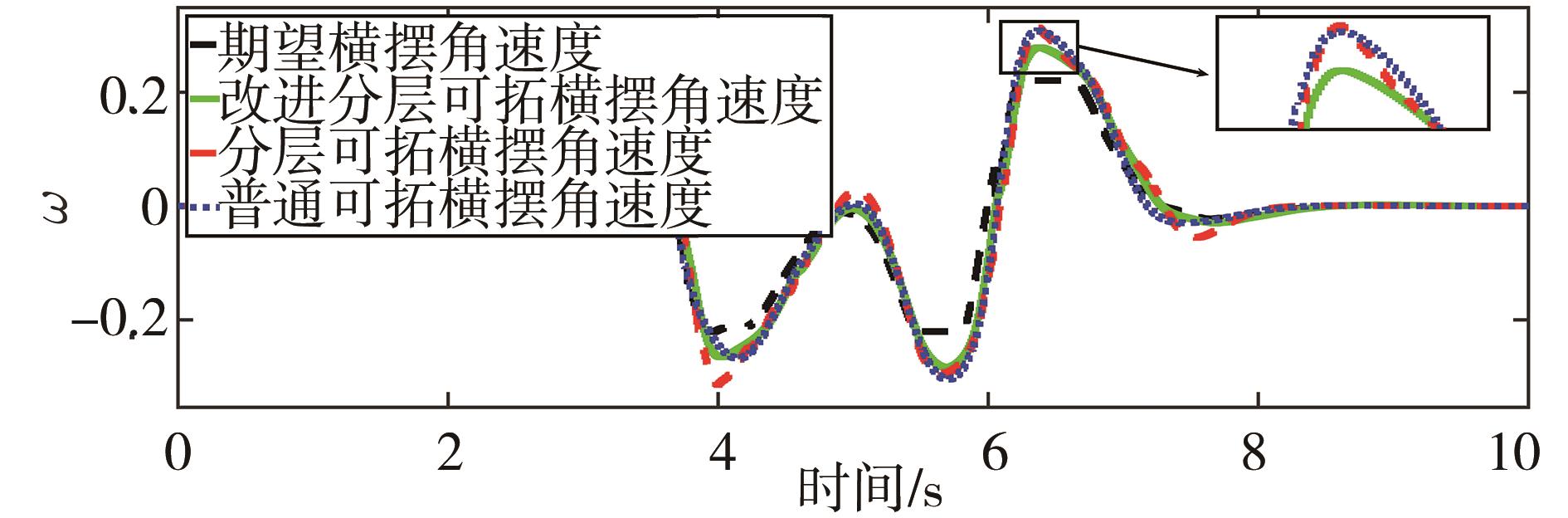
图14
双移线工况车速对比图"
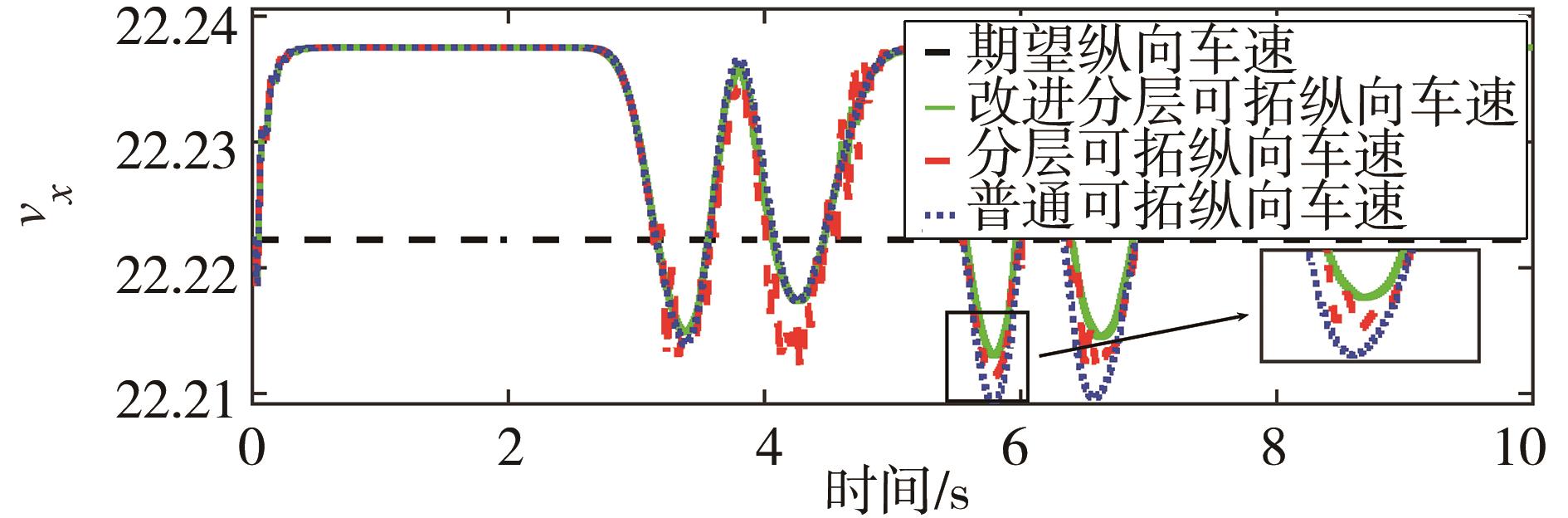
图15
双移线工况AFS权重系数对比图"
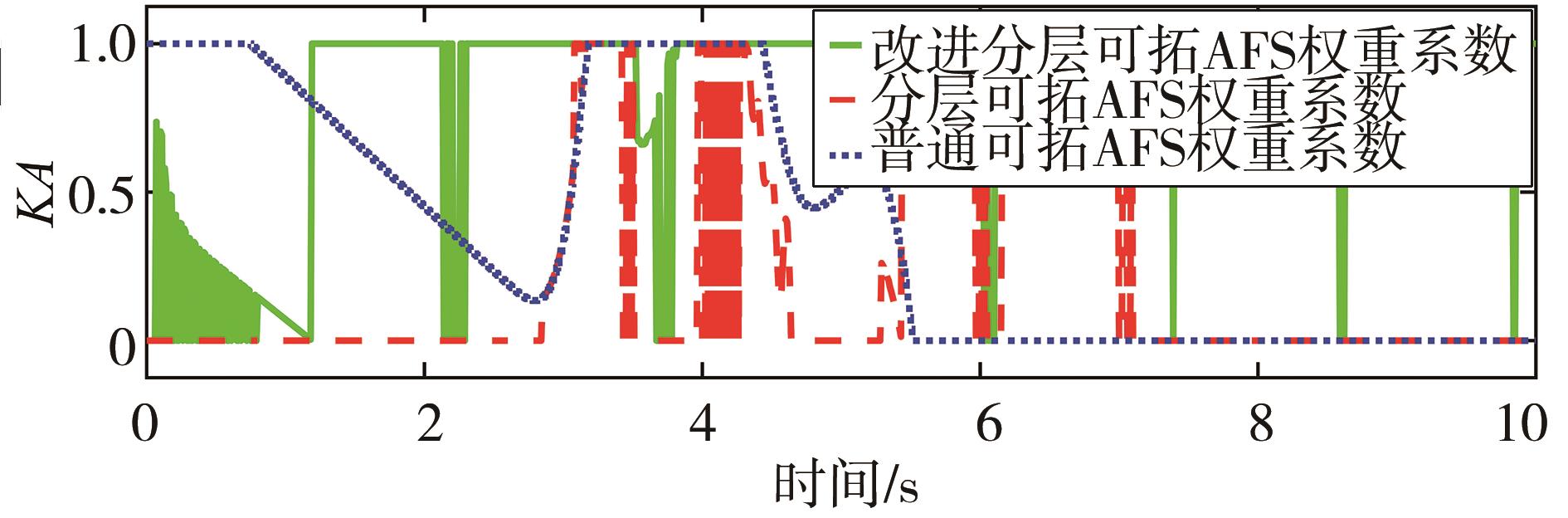

图16
双移线工况DYC权重系数对比图"
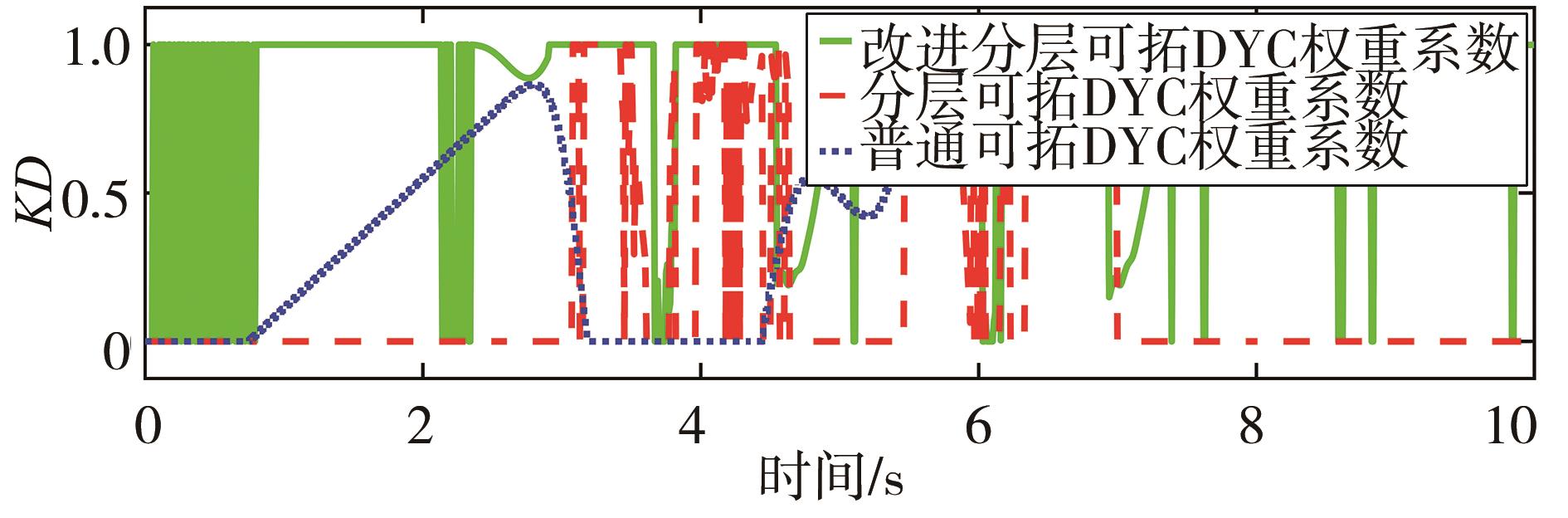
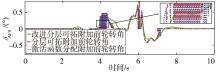
图17
双移线工况附加前轮转角对比图"
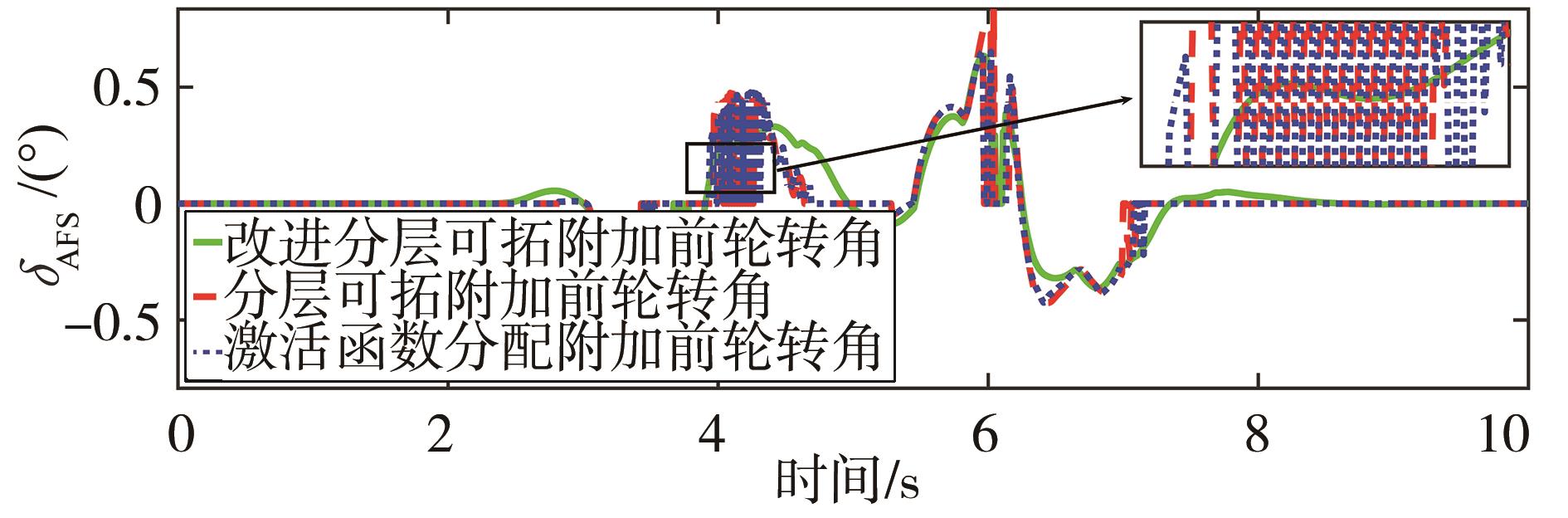
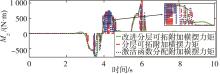
图18
双移线工况附加横摆力矩对比图"
表2
双移线工况全时段误差值"
| 方法 | 纵向车速 全时段误差 | 方法 | 横摆角速度 全时段误差 |
|---|---|---|---|
| 改进分层可拓 | 改进分层可拓 | ||
| 分层可拓 | 分层可拓 | ||
| 普通可拓 | 普通可拓 |
图19
紧急避障工况路径跟踪图"
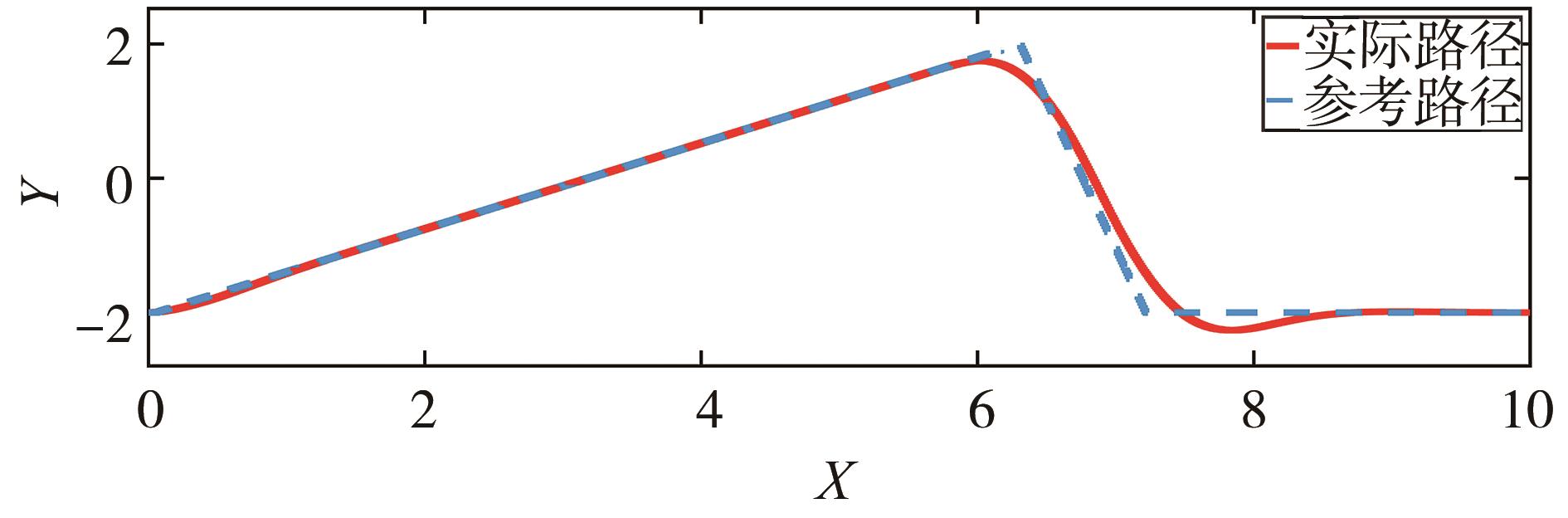
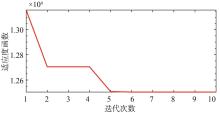
图20
鲸鱼算法迭代图"
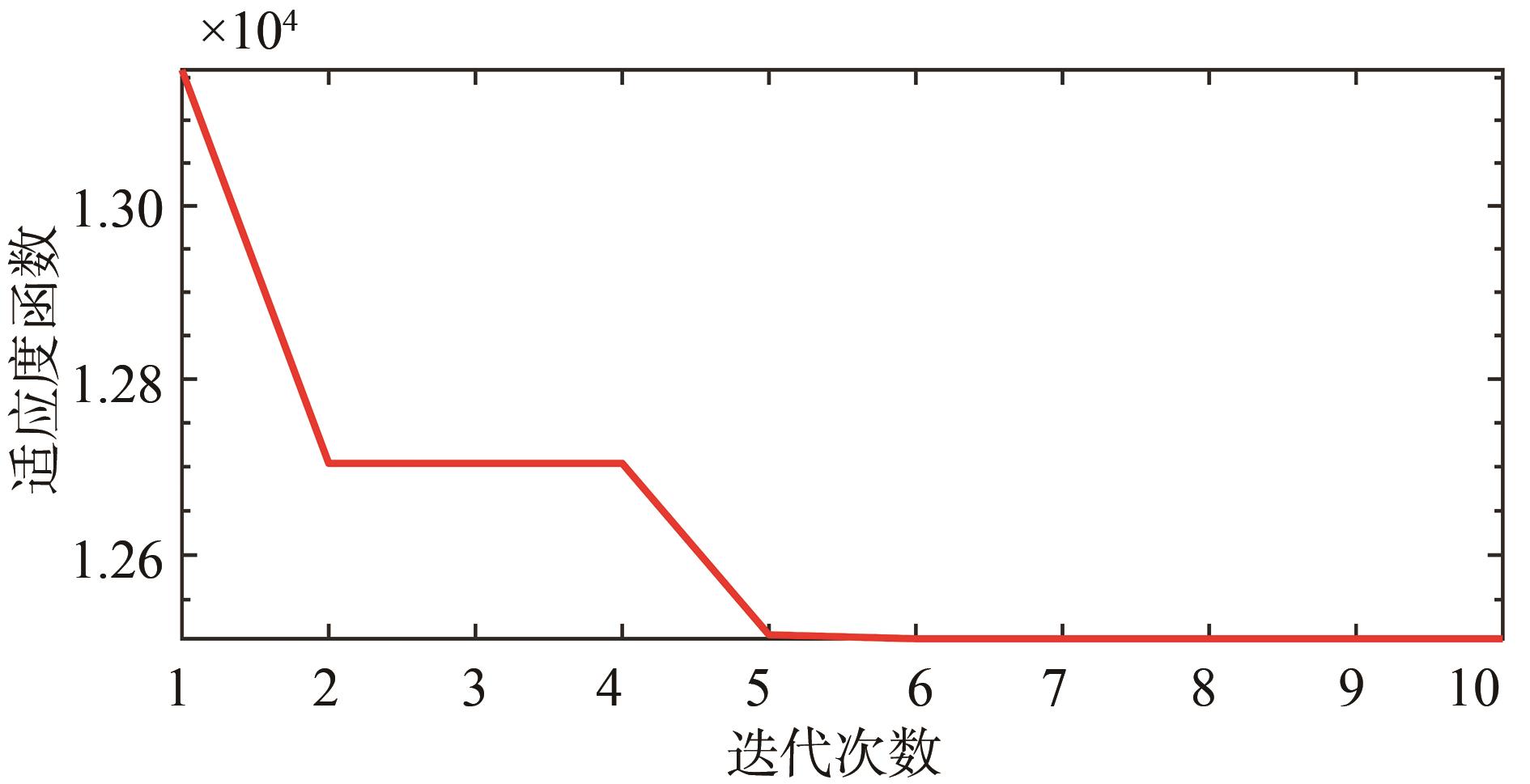
图21
紧急避障工况横摆角速度对比图"
图22
紧急避障工况车速对比图"
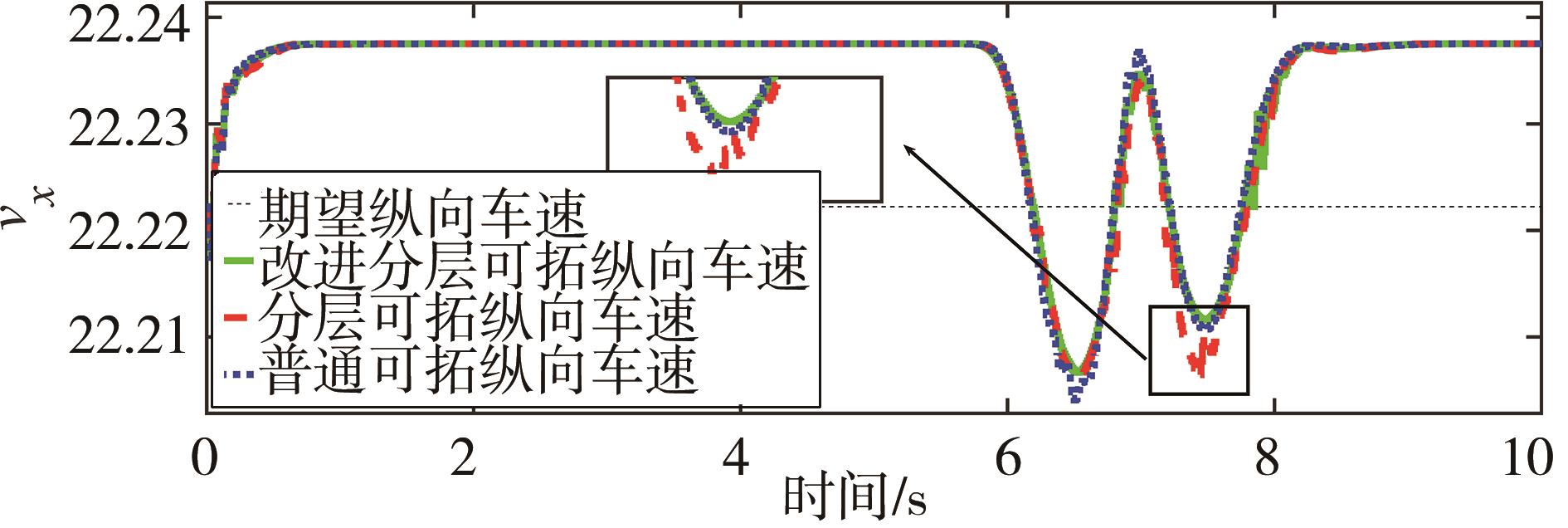
图23
紧急避障工况AFS权重系数对比图"
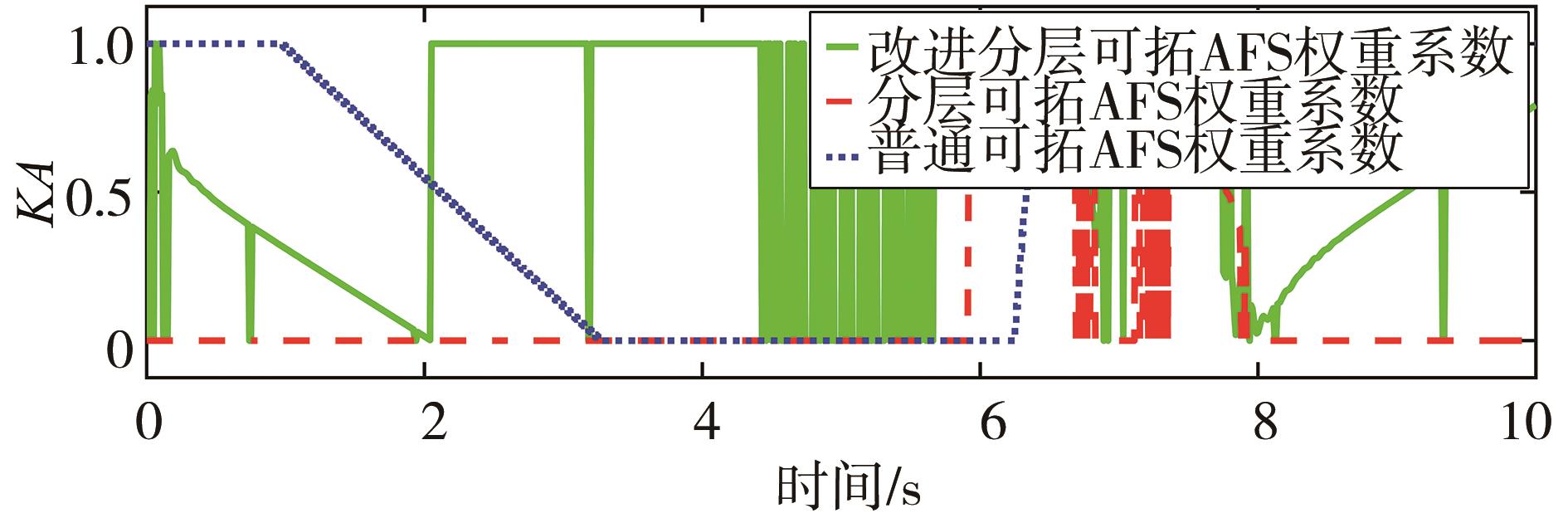
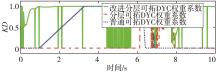
图24
紧急避障工况DYC权重系数对比图"
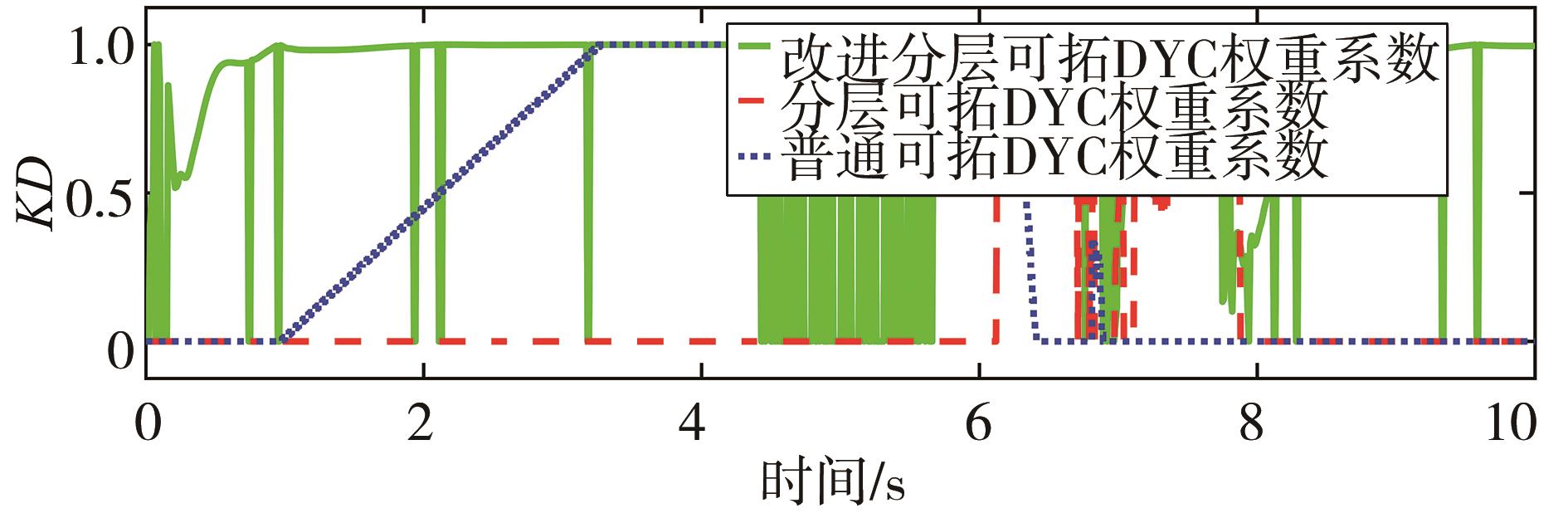
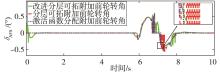
图25
紧急避障工况附加前轮转角对比图"
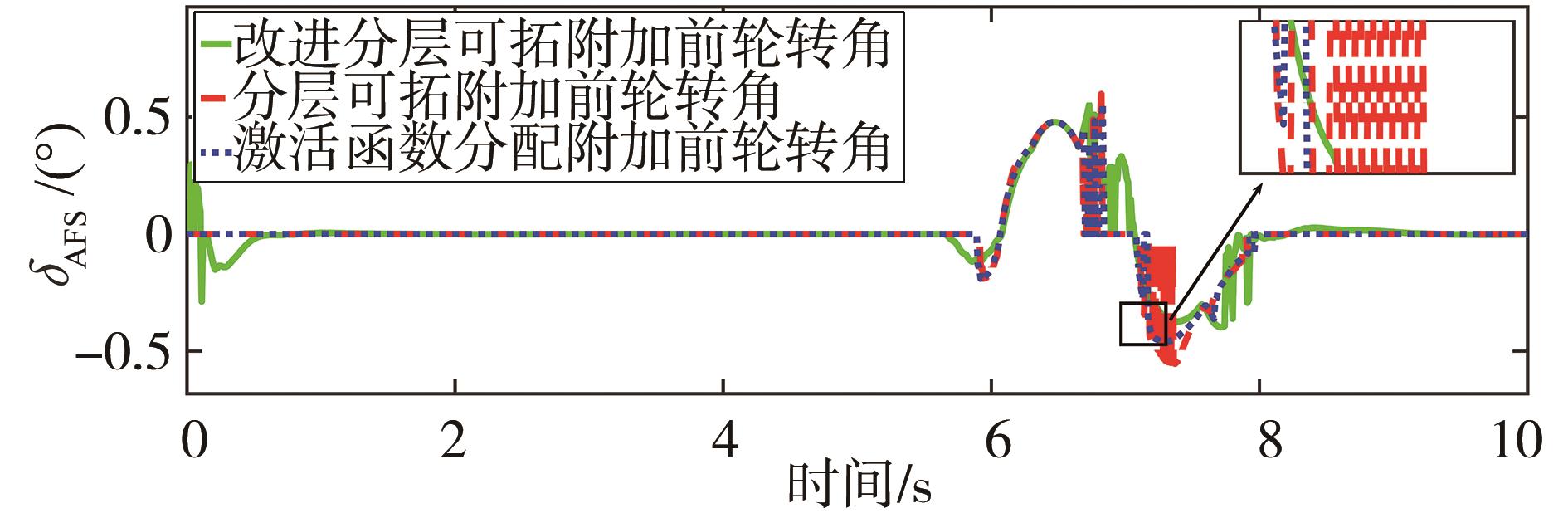
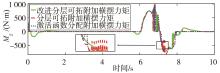
图26
紧急避障工况附加横摆力矩对比图"
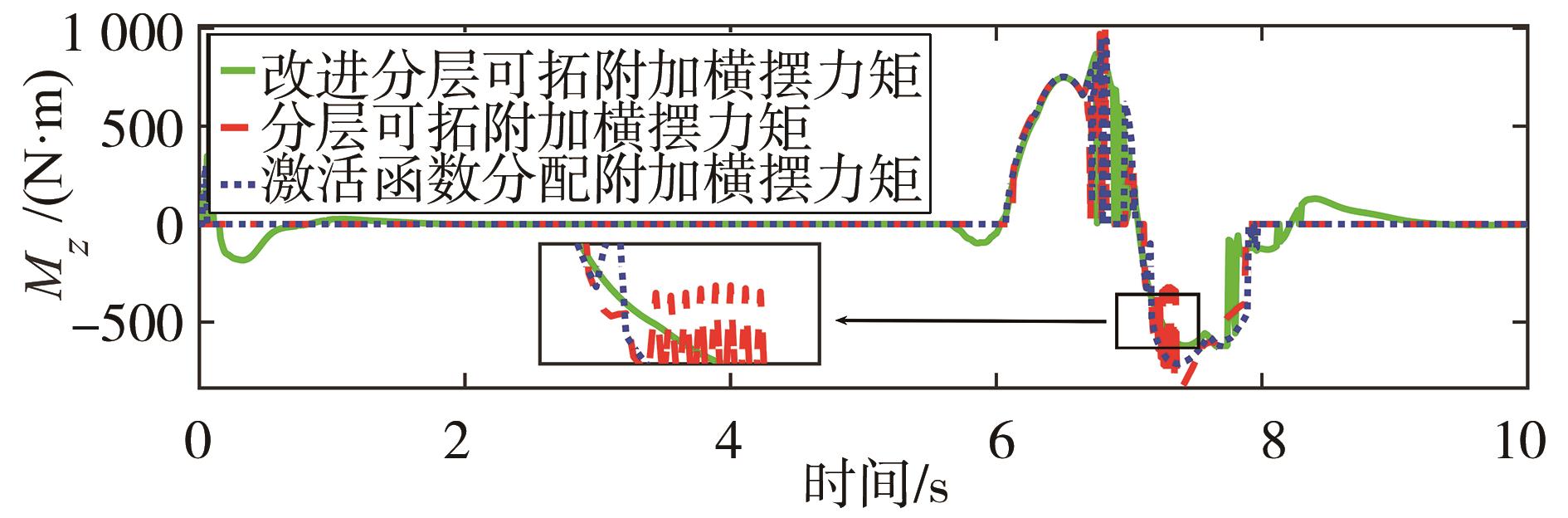
表3
紧急避障工况全时段误差值"
| 方法 | 纵向车速 全时段误差 | 方法 | 横摆角速度 全时段误差 |
|---|---|---|---|
| 改进分层可拓 | 改进分层可拓 | ||
| 分层可拓 | 分层可拓 | ||
| 普通可拓 | 普通可拓 |
| 1 | TERMOUS H, SHRAIM H, TALJ R, et al. Coordinated control strategies for active steering, differential braking and active suspension for vehicle stability, handling and safety improvement[J]. Vehicle System Dynamics, 2018, 57: 1-36. |
| 2 | 赵树恩, 胡洪银, 景东印. AFS/DYC协调控制的分布式驱动电动汽车稳定性控制[J]. 华侨大学学报: 自然科学版, 2021, 42(5): 571-579. |
| ZHAO S E, HU H Y, JING D Y. Stability control of distributed driven electric vehicles controlled by AFS/DYC coordination[J]. Journal of Huaqiao University: Natural Science Edition, 2021, 42(5): 571-579. | |
| 3 | 田杰, 高翔, 陈宁. 基于AFS和DYC协调控制的车辆稳定性研究[J]. 机械设计, 2010, 27(10): 18-21. |
| TIAN J, GAO X, CHEN N. Research on vehicle stability based on coordinated control of AFS and DYC[J]. Mechanical Design, 2010, 27(10): 18-21. | |
| 4 | ZHAO J, WONG P K, MA X, et al. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy[J]. Vehicle System Dynamics, 2017, 55(1): 72-103. |
| 5 | KARBALAEI R, GHAFFARI A, KAZEMI R, et al. Design of an integrated AFS/DYC based on fuzzy logic control[C]. 2007 IEEE International Conference on Vehicular Electronics and Safety. IEEE, 2007: 1-6. |
| 6 | 刘力, 罗禹贡, 江青云, 等. 基于广义预测理论的AFS/DYC底盘一体化控制[J]. 汽车工程, 2011, 33(1): 52-55. |
| LIU L, LUO Y G, JIANG Q Y, et al. Integrated control of AFS/DYC chassis based on generalized prediction theory[J]. Automotive Engineering, 2011, 33(1): 52-55. | |
| 7 | JIN X, YU Z, YIN G, et al. Improving vehicle handling stability based on combined AFS and DYC system via robust Takagi-Sugeno fuzzy control[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(8): 2696-2707. |
| 8 | CHENG S, LI L, LIU C Z, et al. Robust LMI-based H-infinite controller integrating AFS and DYC of autonomous vehicles with parametric uncertainties[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 51(11): 6901-6910. |
| 9 | ZHANG H, WANG J. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach[J]. IEEE Transactions on Vehicular Technology, 2016, 65(1): 489-494. |
| 10 | LIANG J, LU Y, YIN G, et al. A distributed integrated control architecture of AFS and DYC based on MAS for distributed drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5565-5577. |
| 11 | GANG L, ZONG C F, ZHENG H Y, et al. Vehicle active front steering and yaw moment integrated control[C]. Proceedings 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE). IEEE, 2011: 787-790. |
| 12 | 蔡英凤, 臧勇, 孙晓强, 等. 基于可拓切换控制方法的智能车辆车道保持系统研究[J]. 中国公路学报, 2019, 32(6): 43-52. |
| CAI Y F, ZANG Y, SUN X Q, et al. Research on intelligent vehicle lane keeping system based on extendable switching control method[J]. China Journal of Highway and Transport, 2019, 32(6): 43-52. | |
| 13 | 蔡英凤, 秦顺琪, 臧勇, 等. 基于可拓优度评价的智能汽车横向轨迹跟踪控制方法[J]. 汽车工程, 2019, 41(10): 1189-1196. |
| CAI Y F, QIN S Q, ZANG Y, et al. Lateral trajectory tracking and control method of intelligent automobile based on extendable merit evaluation[J]. Automotive Engineering, 2019, 41(10): 1189-1196. | |
| 14 | 臧勇, 蔡英凤, 孙晓强, 等. 基于可拓博弈的智能汽车轨迹跟踪协调控制方法研究[J]. 机械工程学报, 2022, 58(8): 181-194. |
| ZANG Y, CAI Y F, SUN X Q, et al. Research on coordinated control method of intelligent vehicle trajectory tracking based on extendable game[J]. Journal of Mechanical Engineering, 2022, 58(8): 181-194. | |
| 15 | 蔡英凤, 臧勇, 孙晓强,等. 自动驾驶汽车横向可拓预瞄切换控制系统研究[J]. 汽车工程, 2018, 40(9): 1032-1039. |
| CAI Y F, ZANG Y, SUN X Q, et al. Research on transverse extendable pre-sight switching control system for autonomous vehicles[J]. Automotive Engineering, 2018, 40(9): 1032-1039. | |
| 16 | 张志勇, 龙凯, 杜荣华, 等. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| ZHANG Z Y, LONG K, DU R H, et al. Coordinated tracking and control of high-speed overtaking trajectory of autonomous vehicles[J]. Automotive Engineering, 2021, 43(7): 995-1004. | |
| 17 | 郑香美, 高兴旺, 赵志忠. 基于“魔术公式”的轮胎动力学仿真分析[J]. 机械与电子, 2012(9): 16-20. |
| ZHENG X M, GAO X W, ZHAO Z Z. Simulation analysis of tire dynamics based on “Magic Formula”[J]. Machinery & Electronics, 2012(9): 16-20. | |
| 18 | 蔡文, 杨春燕. 可拓学的基础理论与方法体系[J]. 科学通报, 2013, 58(13): 1190-1199. |
| CAI W, YANG C Y. Basic theory and methodology of extensibility[J]. Chinese Science Bulletin, 2013, 58(13): 1190-1199. | |
| 19 | 陈无畏, 孙晓文, 汪洪波. 汽车差动助力转向系统的可拓协调控制[J]. 中国科学: 技术科学, 2017, 47(3): 324-335. |
| CHEN W W, SUN X W, WANG H B. Extendable coordinated control of automotive differential power steering system[J]. Science China Technological Sciences, 2017, 47(3): 324-335. | |
| 20 | SMARANDACHE F. Generalizations of the distance and dependent function in extenics to 2D, 3D, and n-D[J]. Progress in Physics, 2012, 12(8): 1-16. |
| 21 | MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| 22 | WILLEMS J C. Least squares stationary optimal control and the algebraic Riccati equation[J]. IEEE Transactions on Automatic Control, 1971, 16(6): 621-634. |
| 23 | 曹坤, 罗禹贡, 戴一凡, 等. 分布式电驱动车辆纵-横-垂向力协同控制[J]. 汽车工程, 2015, 37(9): 985-991. |
| CAO K, LUO Y G, DAI Y F, et al. Collaborative control of vertical-horizontal-vertical force of distributed electric drive vehicles[J]. Automotive Engineering, 2015, 37(9): 985-991. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [4] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [5] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [6] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [7] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [8] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [9] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [10] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [11] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [12] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [13] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [14] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
| [15] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
|