汽车工程 ›› 2023, Vol. 45 ›› Issue (10): 1803-1814.doi: 10.19562/j.chinasae.qcgc.2023.10.003
所属专题: 智能网联汽车技术专题-规划&决策2023年
芦勇1,何一超2,田贺2,江昆1,杨殿阁1( )
)
Yong Lu1,Yichao He2,He Tian2,Kun Jiang1,Diange Yang1()
摘要:
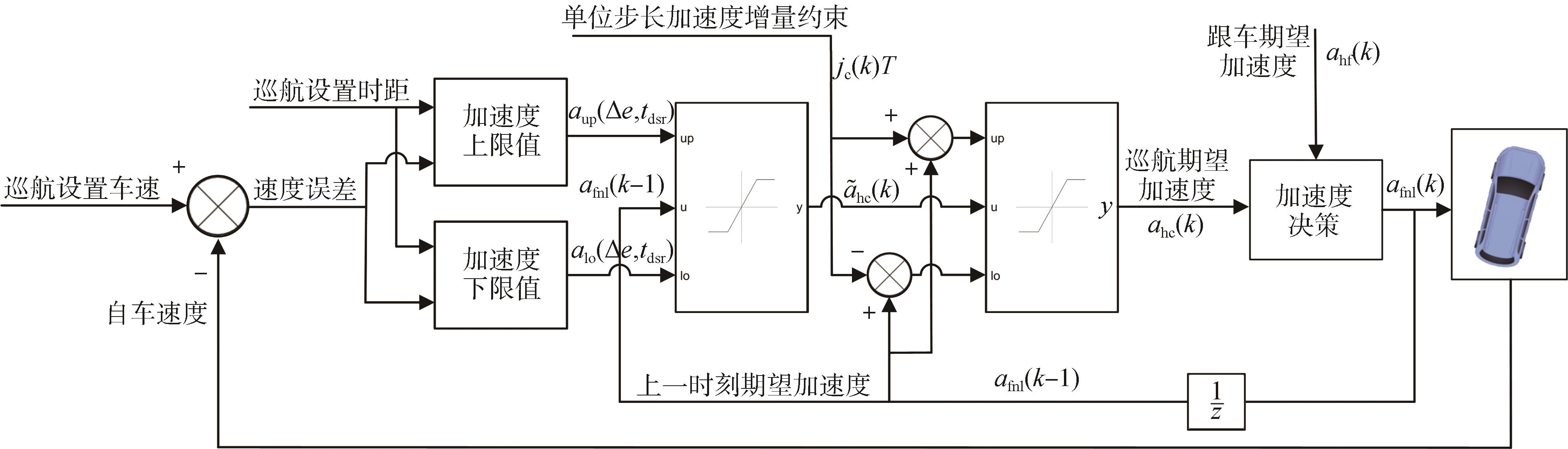
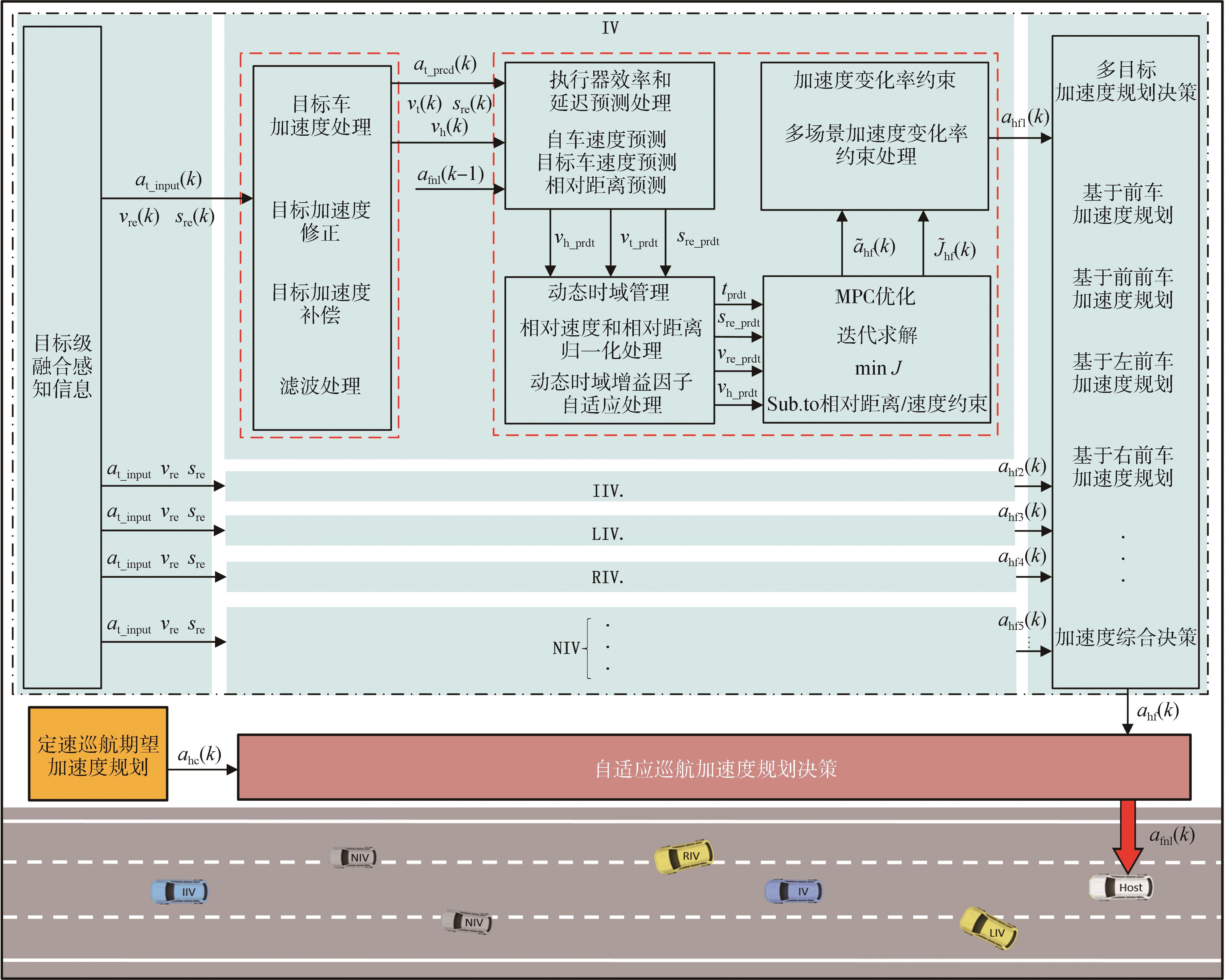
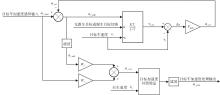
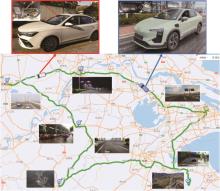
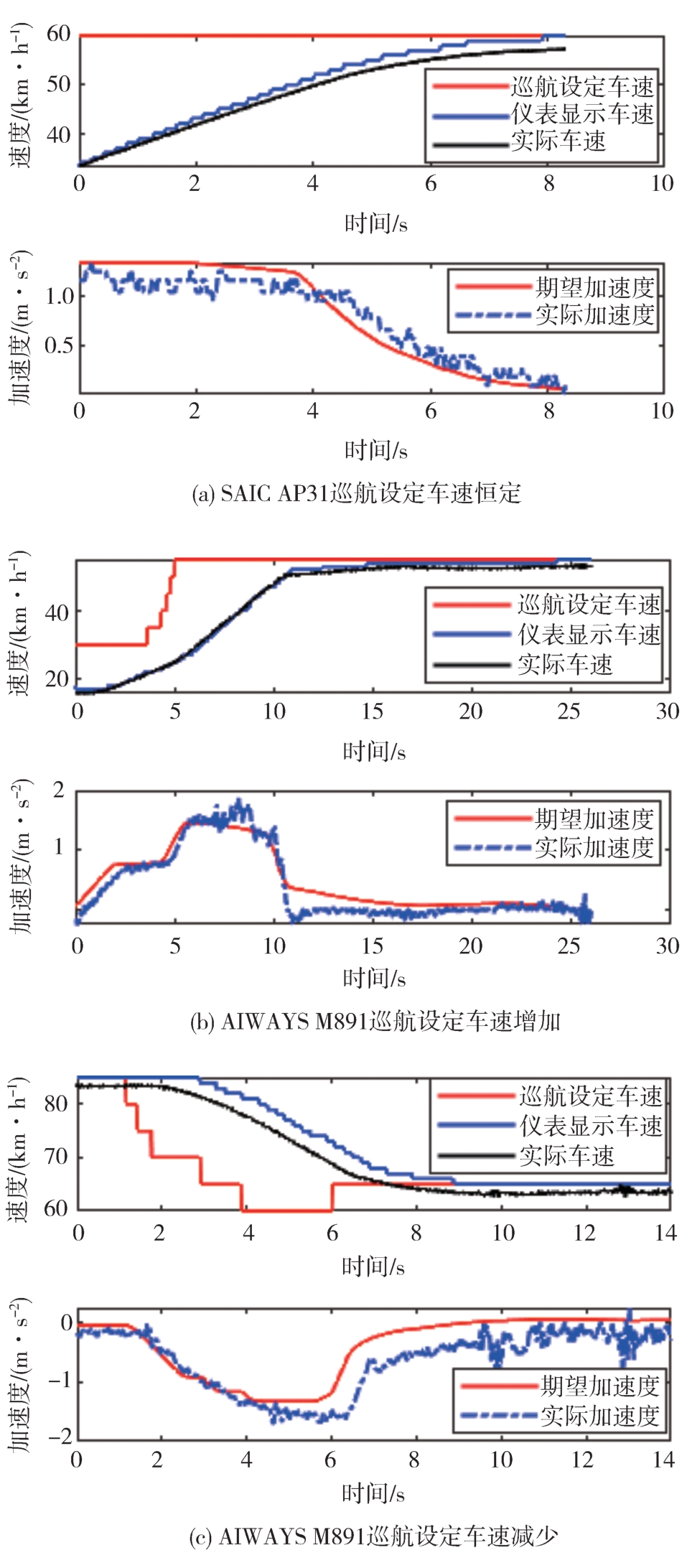
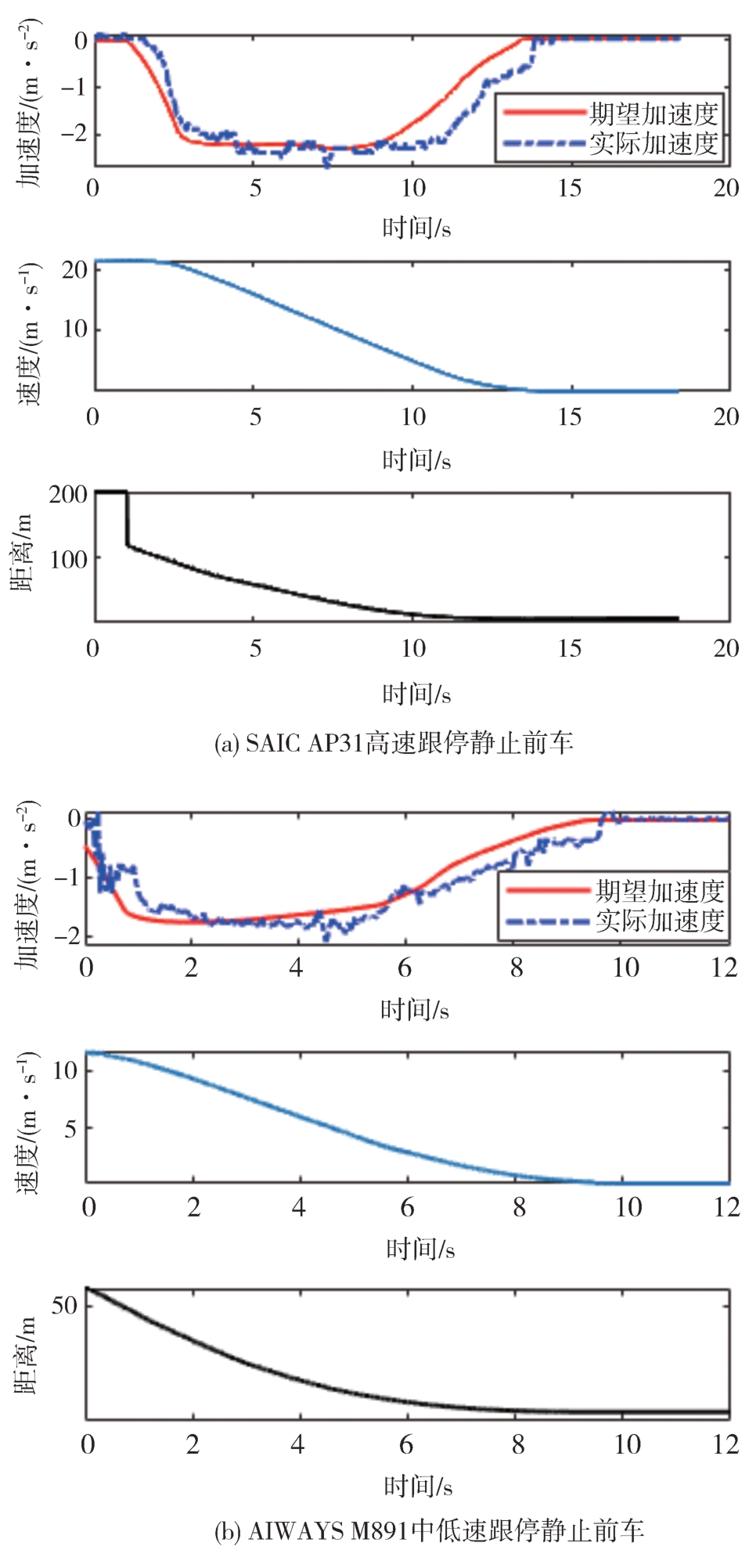
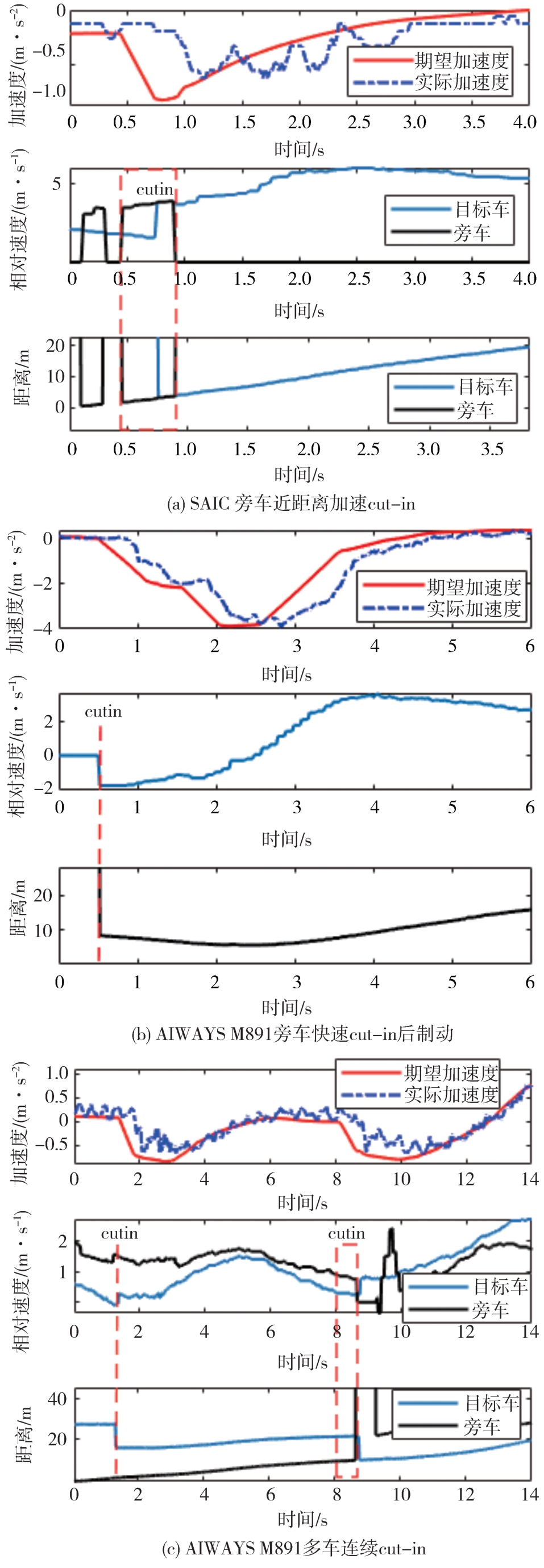
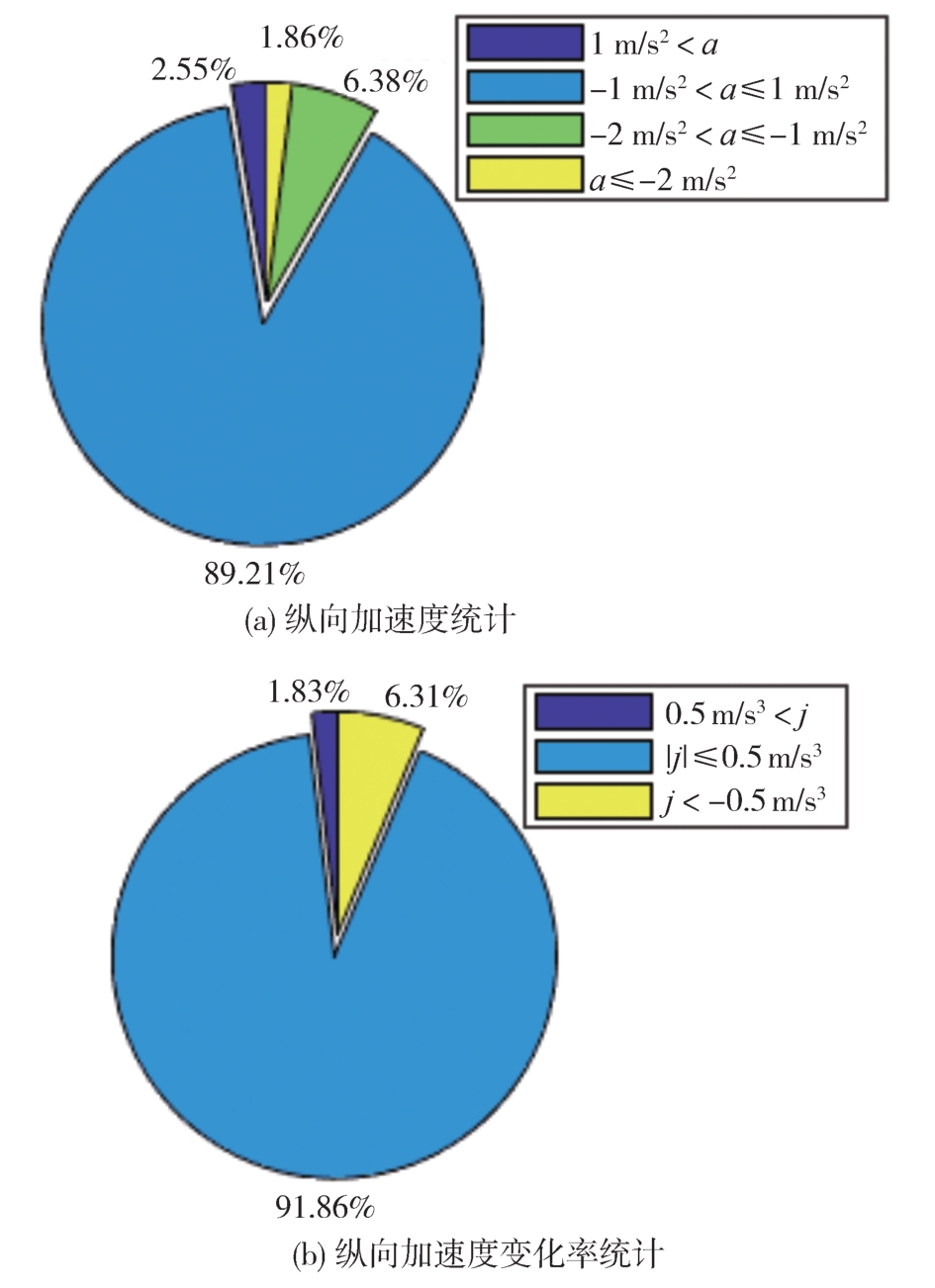
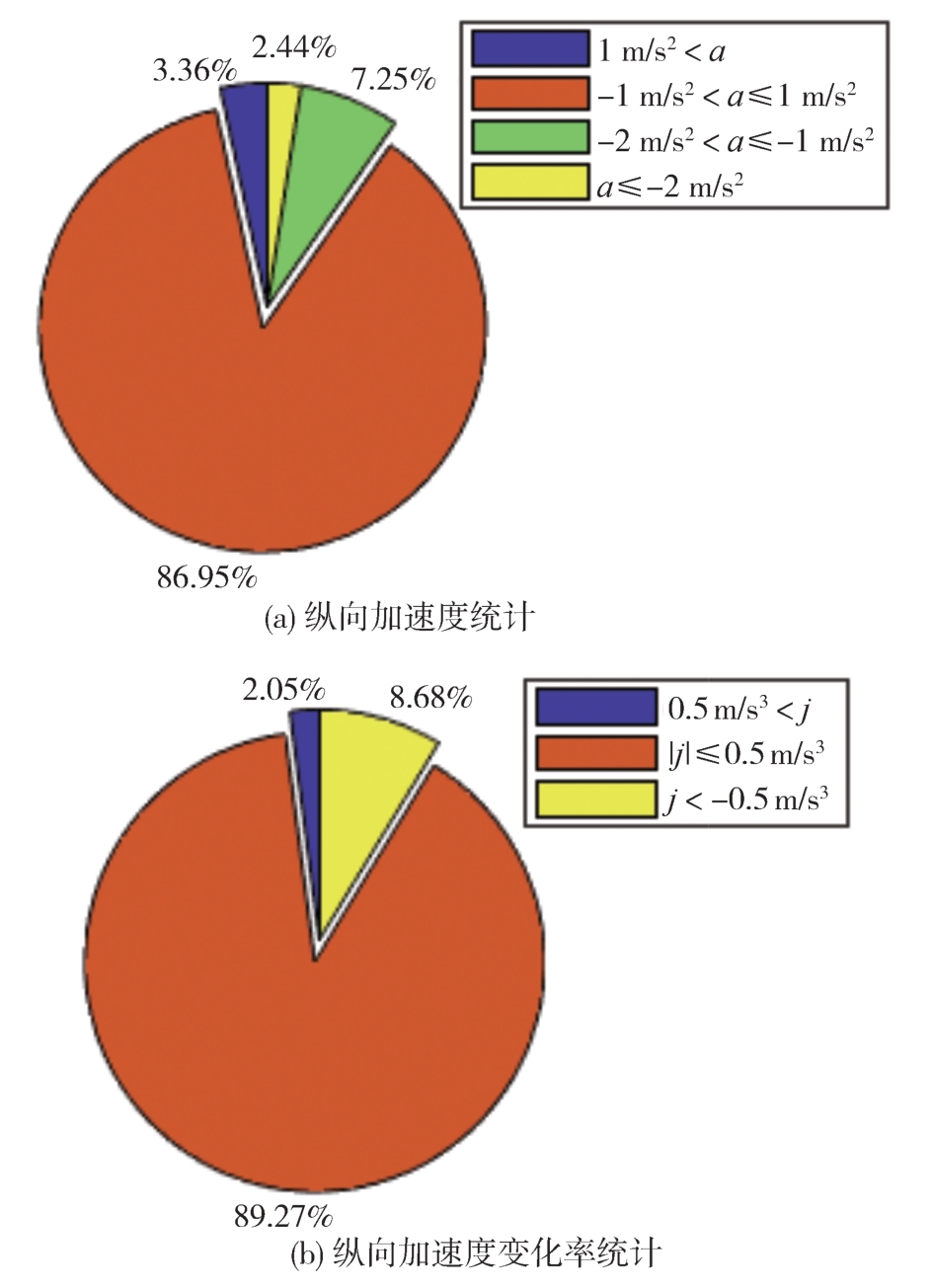
当前应用较多的基于预测的纵向加速度规划方法由于算法复杂,占用硬件资源大,较难在低算力控制器上实现量产。而传统的规划方法虽然占用资源少,实时性好,但无法保证高安全、高舒适以及高可靠的量产要求,且缺少对多车型适配的高通用特性。为解决上述问题,本文提出一种纵向加速度规划方法。 定速巡航规划采用多维优化PID控制方法,借助PID控制思想,合理划分误差段和时距段,离线设计二维加速度上下限表,可适配多车型多时距配置,提升算法通用性。跟车巡航加速度规划采用基于动态预测时域的模型预测控制方法,通过考虑执行器效率和时延,预测车辆运动状态,进而提高系统安全性。同时,对预测时域进行动态管理,具备多场景自适应、多车型适配的高通用性,并通过降低求解复杂度,满足低资源占用要求。通过搭载低算力控制器的多款量产车辆道路试验,验证了该方法在定速巡航和跟车场景中具有高安全、高可靠的特性。两款量产车型1万km路试结果舒适性体感占比分别为89.21%和86.95%,以及百公里接管次数均小于1次,表明了该方法满足舒适性和鲁棒性的量产要求。