汽车工程 ›› 2023, Vol. 45 ›› Issue (12): 2318-2329.doi: 10.19562/j.chinasae.qcgc.2023.12.014
所属专题: 底盘&动力学&整车性能专题2023年
胡丹丹,尹鹏飞,牛国臣( ),赵金聚
),赵金聚
收稿日期:2022-05-20
修回日期:2022-06-20
出版日期:2023-12-25
发布日期:2023-12-21
通讯作者:
牛国臣
E-mail:niu_guochen@139.com
基金资助:
Dandan Hu,Pengfei Yin,Guochen Niu(),Jinju Zhao
Received:2022-05-20
Revised:2022-06-20
Online:2023-12-25
Published:2023-12-21
Contact:
Guochen Niu
E-mail:niu_guochen@139.com
摘要:
为实现离轴式拖挂车辆在非结构化道路下的主动避障,提出一种基于拖挂车辆模型预测控制的主动避障控制器,且无须全局路径与路径跟踪器支持。首先,基于刚体运动学和非完整约束建立挂接全挂车的拖挂系统运动学模型,并对其运动特性分析与验证。其次,根据拖挂系统运动学模型建立离轴式拖挂车辆的预测模型。最后,提出一种无须全局路径支持,且满足拖挂车辆转弯避碰的惩罚函数,并针对拖挂系统的安全性与稳定性设计目标函数,采用非线性求解器对目标函数优化,将优化输出离散控制序列作用于拖挂系统。仿真与实车实验表明,离轴式拖挂系统主动避障控制器能使拖挂车辆在满足剪切碰撞约束的前提下安全避障,且全挂车避障路径与非避障最短路径的横向误差及航向误差均能收敛。
胡丹丹,尹鹏飞,牛国臣,赵金聚. 非结构化道路下离轴式拖挂车辆主动避障控制研究[J]. 汽车工程, 2023, 45(12): 2318-2329.
Dandan Hu,Pengfei Yin,Guochen Niu,Jinju Zhao. Research on Active Obstacle Avoidance Control of Off-axis Trailing Vehicle on Unstructured Road[J]. Automotive Engineering, 2023, 45(12): 2318-2329.
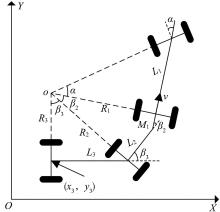
图1
恒定前轮转角下挂接全挂车的离轴式拖挂系统"
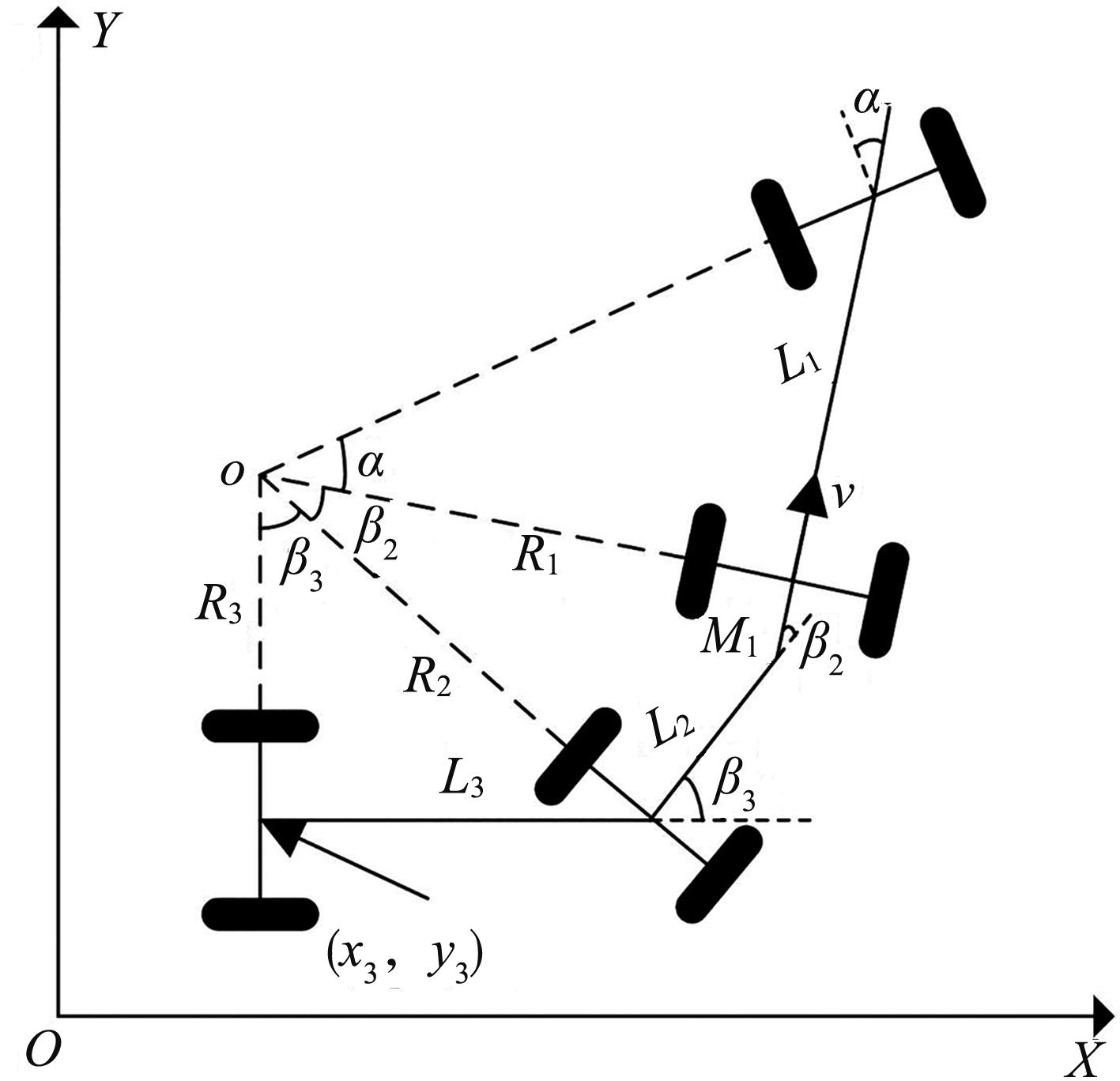
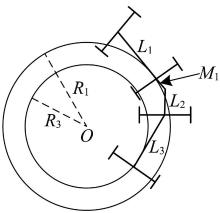
图2
离轴式拖挂车辆前向稳定跟踪同心圆"
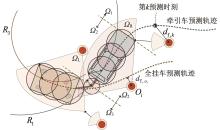
图3
拖挂车辆转弯预测轨迹及碰撞风险"
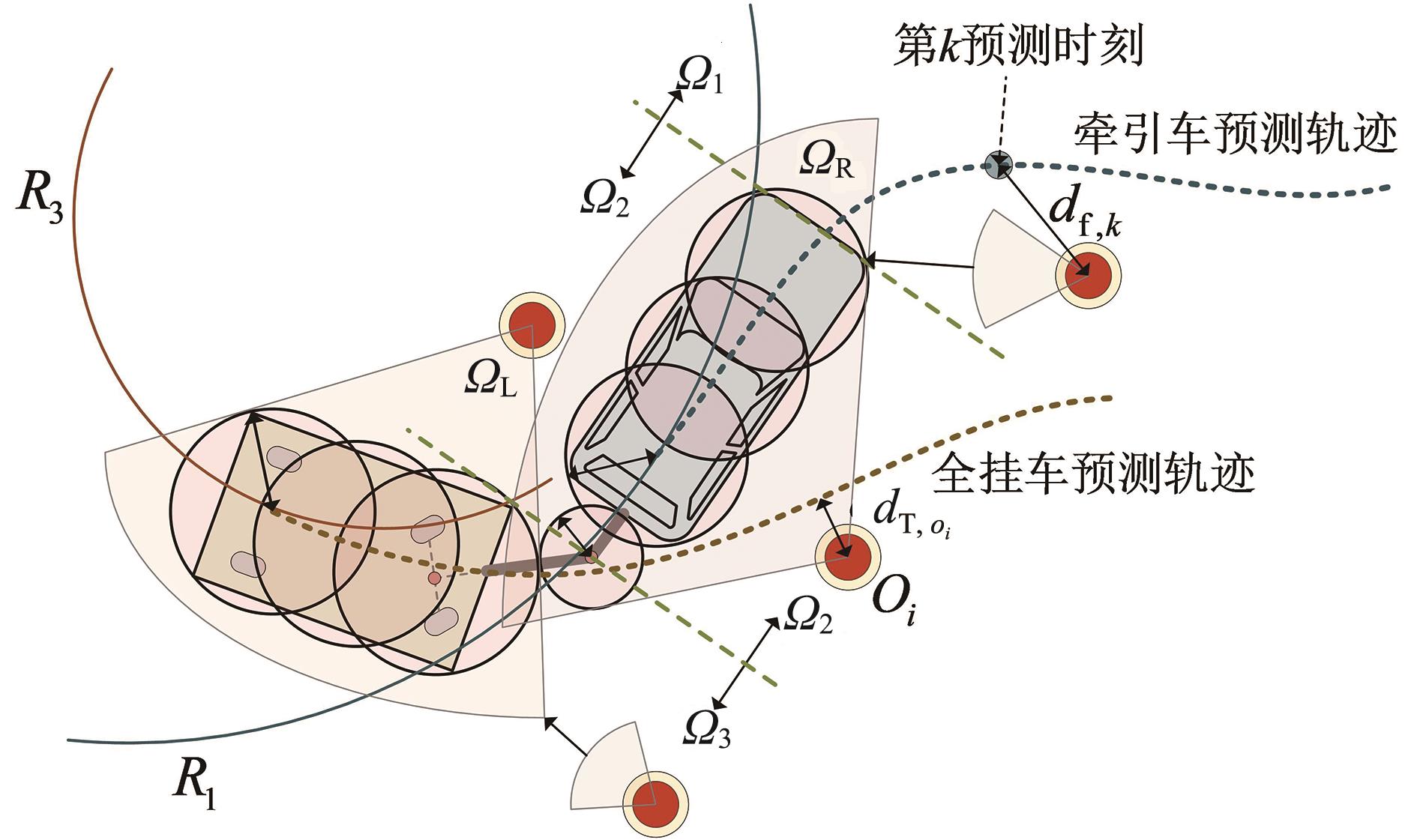
图4
恒定前轮转角下前向运动轨迹"
表1
离轴式拖挂车辆参数"
| 参数 | 数值 |
|---|---|
牵引车轴距 全挂车轴距 牵引车后轴中点到铰接点距离 全挂车前轴中点到铰接点距离 牵引车宽 牵引车长 全挂车宽 全挂车长 最大前轮转角 最大剪切角 最大加速度 | 2.49 1.90 0.60 1.30 1.66 3.63 2.20 3.20 0.39 2.198 1.00 |
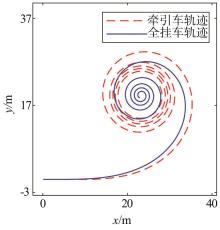
图5
恒定前轮转向角速度下前向运动轨迹"
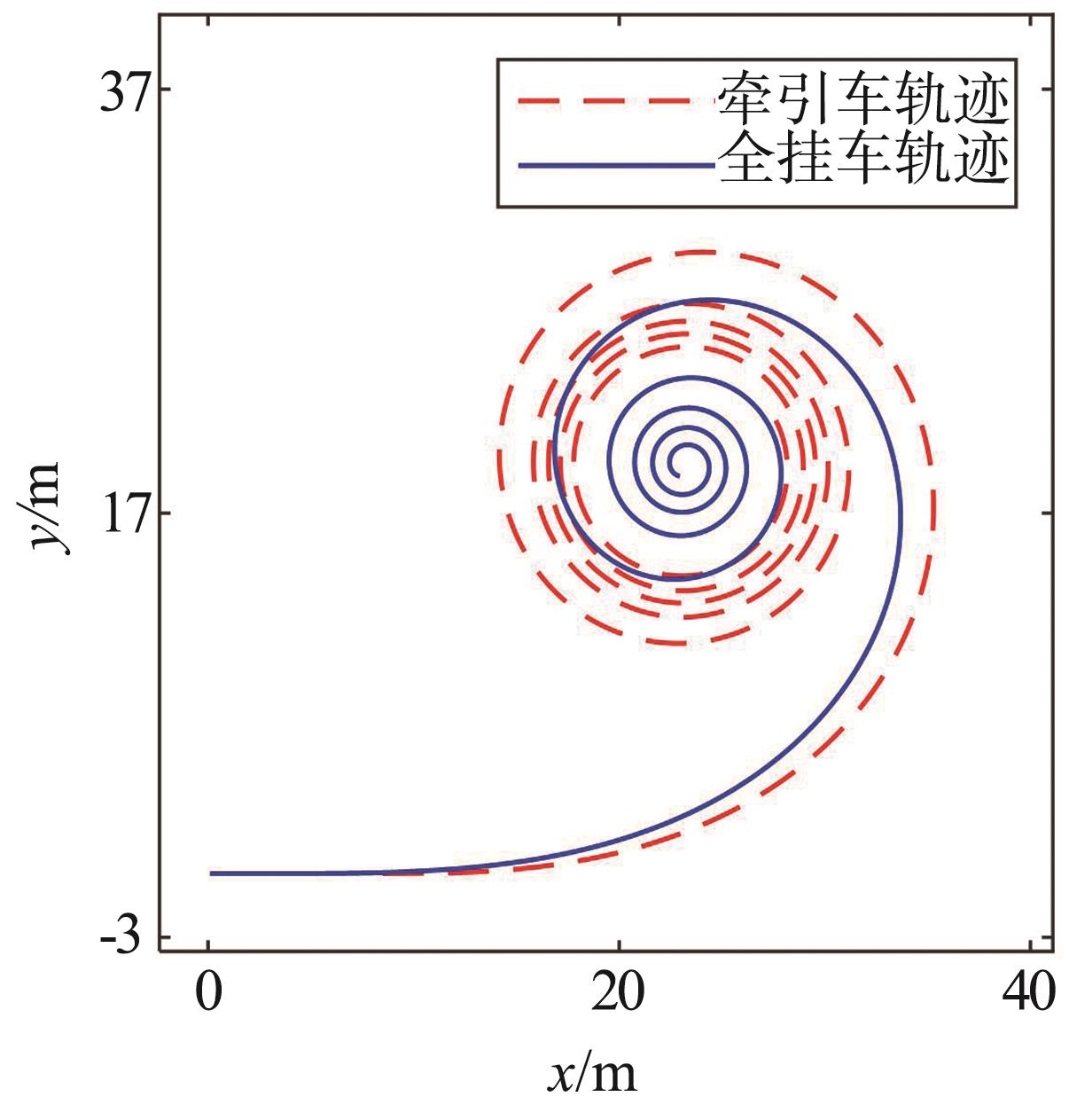
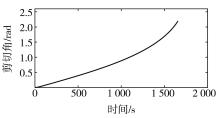
图6
恒定前轮转向角速度下的剪切角"
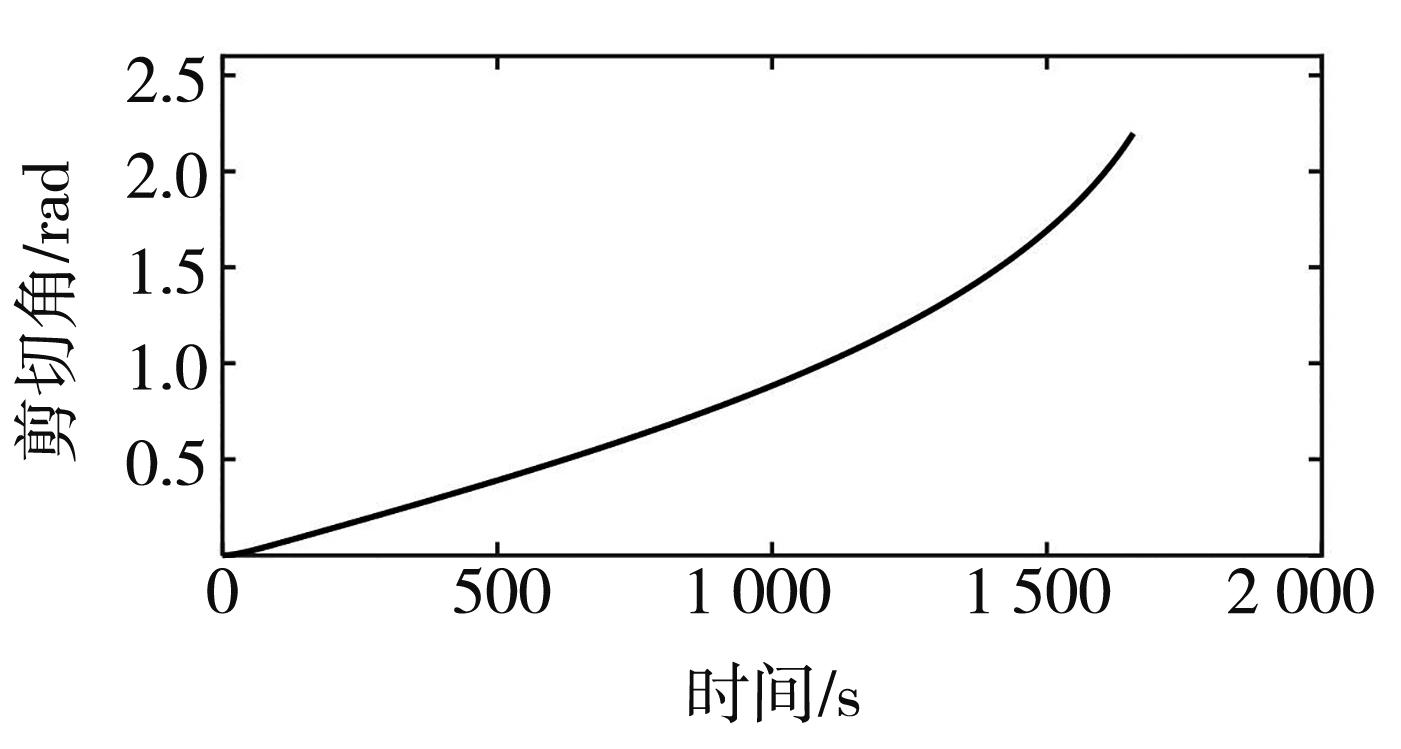
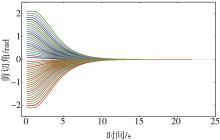
图7
不同初态到稳态的剪切角变化"
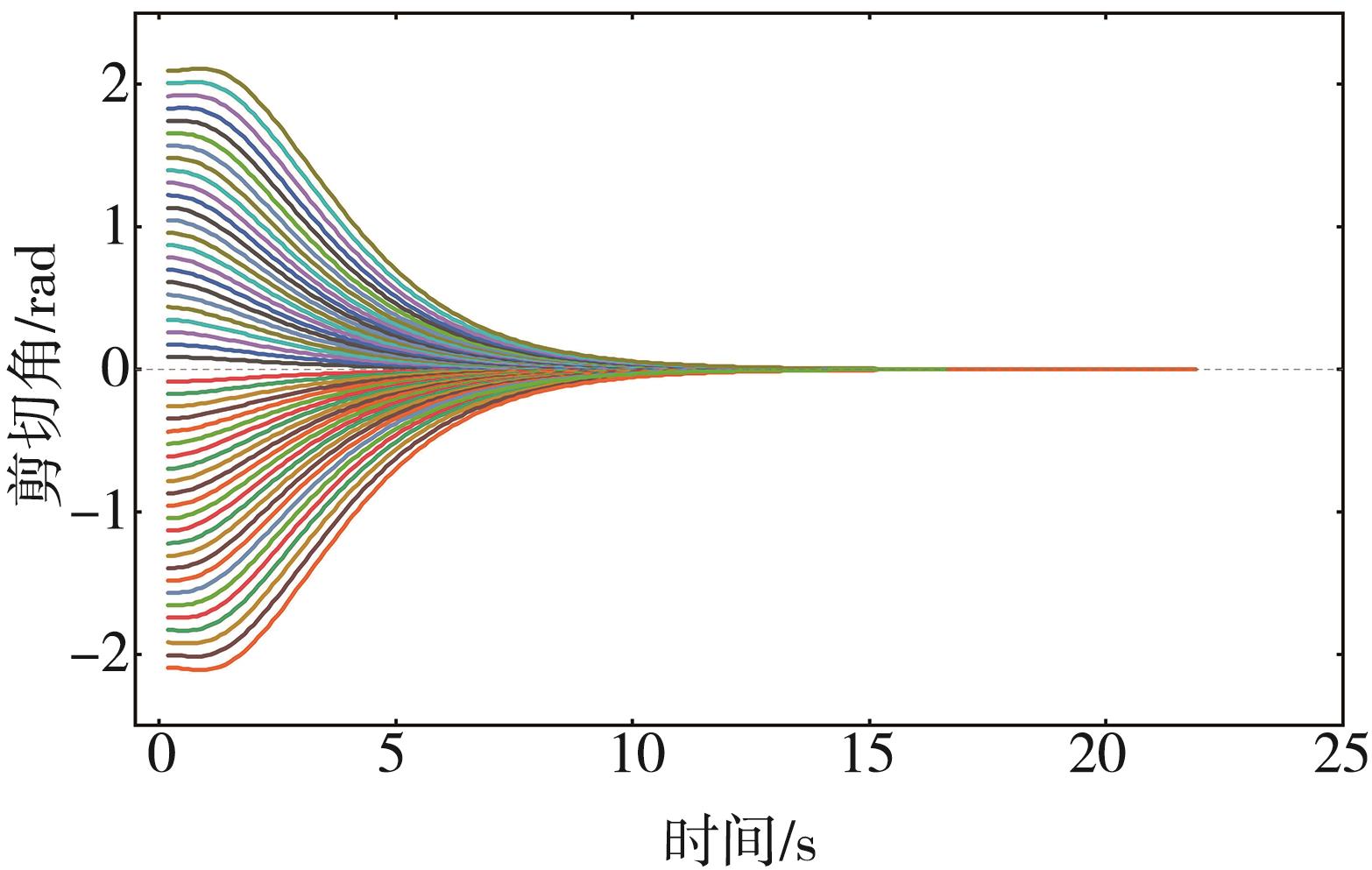
图8
带有随机噪声的正弦波控制量"
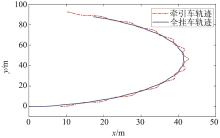
图9
角频率0.11 rad/s正弦波控制量下拖挂系统轨迹"
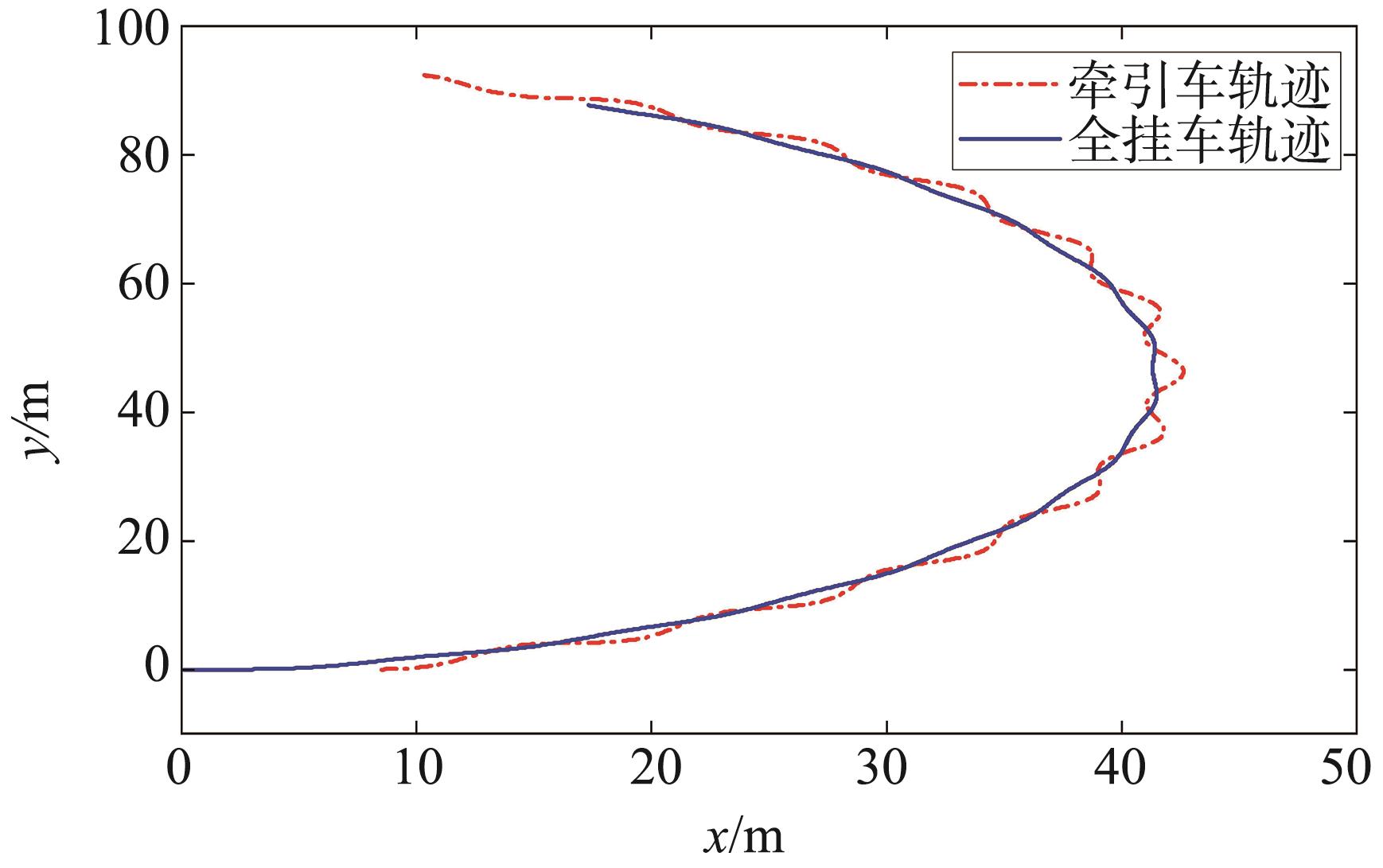
图10
角频率9.10 rad/s正弦波控制量下拖挂系统轨迹"
表2
拖挂系统及乘用车避障控制器参数"
| 参数 | 数值 |
|---|---|
预测时域 控制时域 控制器采样间隔T/s 正数 障碍物碰撞膨胀距离rs/m 障碍物半径ro/m | 25 3 0.2 10-6 0.3 0.7 105、350、100、0.7 |
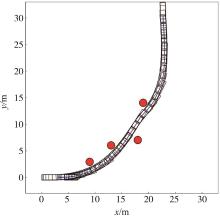
图11
静态场景下采用拖挂系统避障控制器避障足迹"
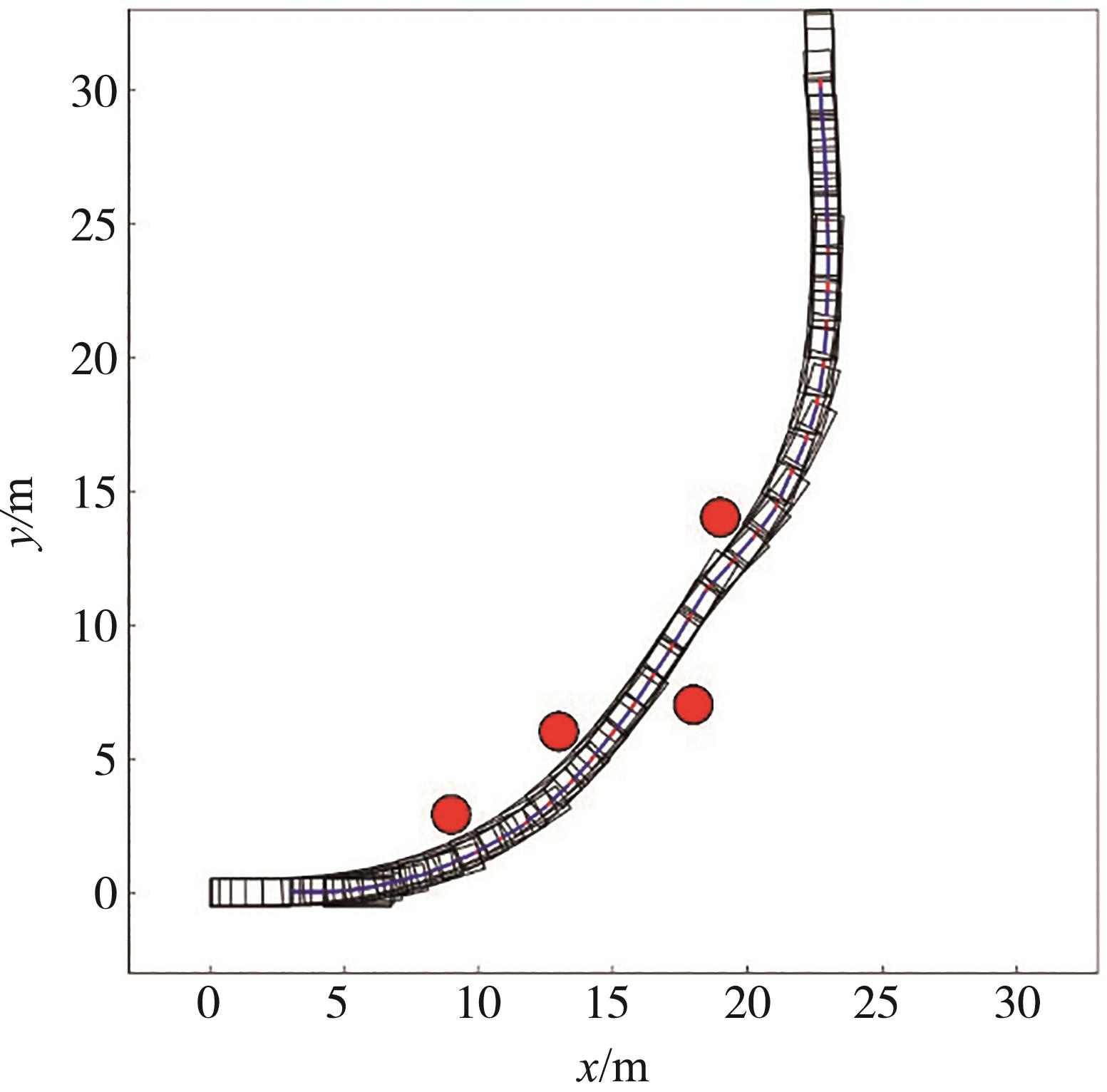
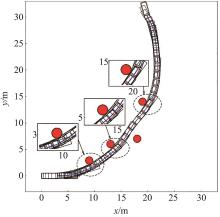
图12
静态场景下采用拖车避障控制器避障足迹"
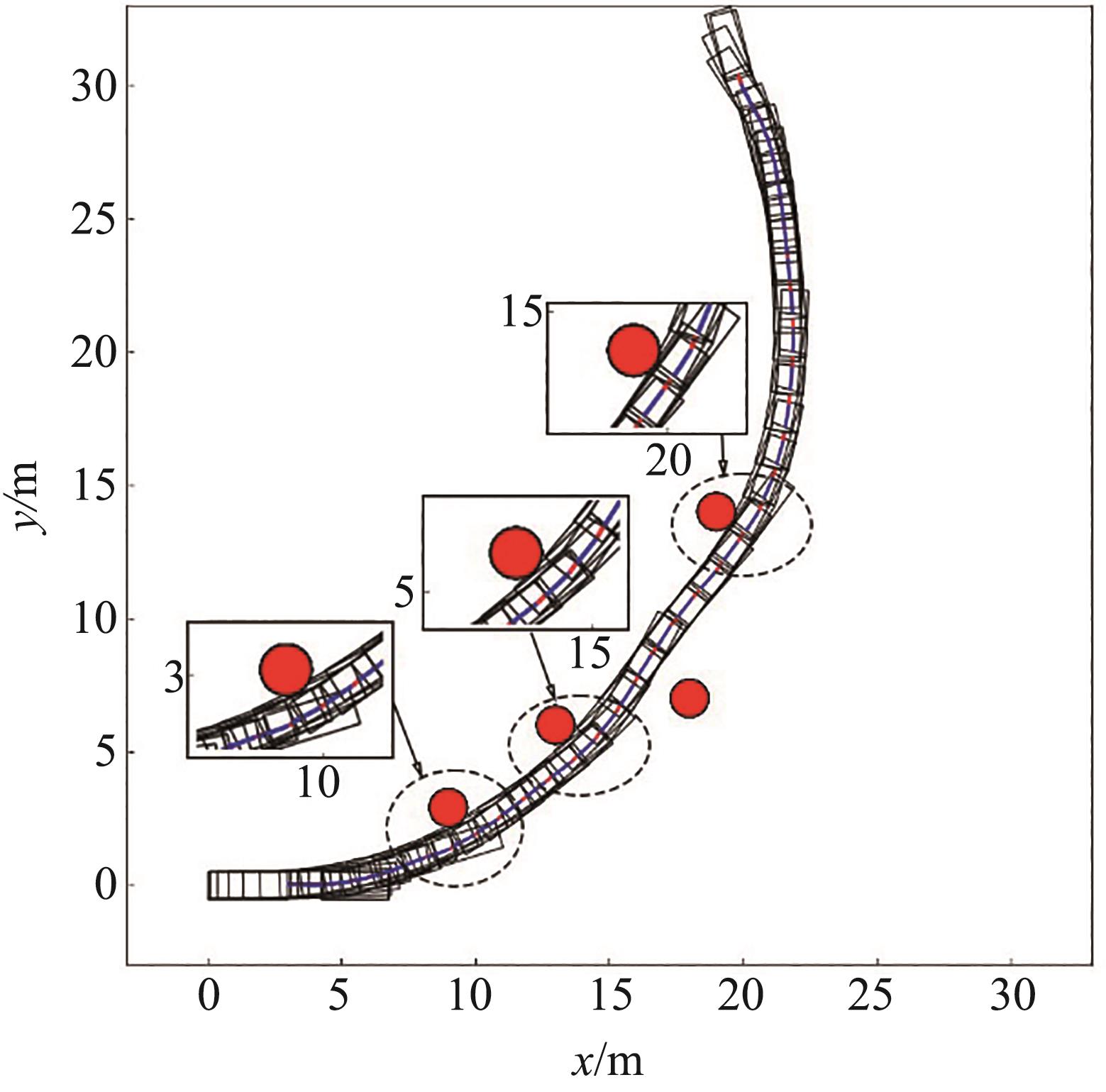
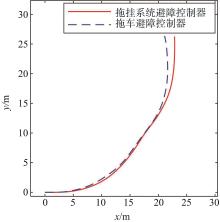
图13
静态场景下挂车避障路径对比"
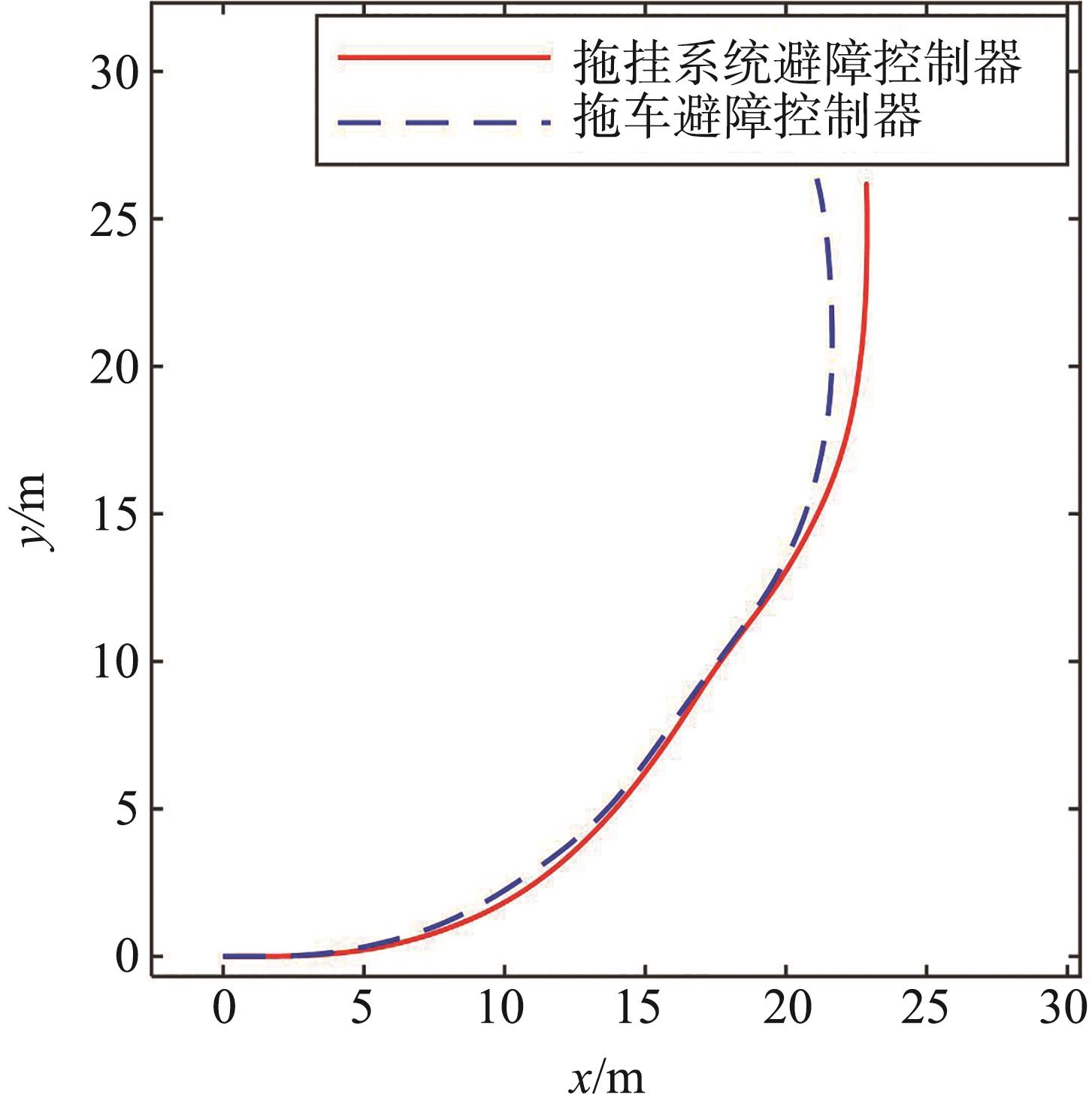
图14
静态场景下控制量对比"
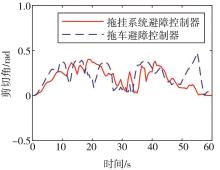
图15
静态场景下拖挂系统剪切角对比"
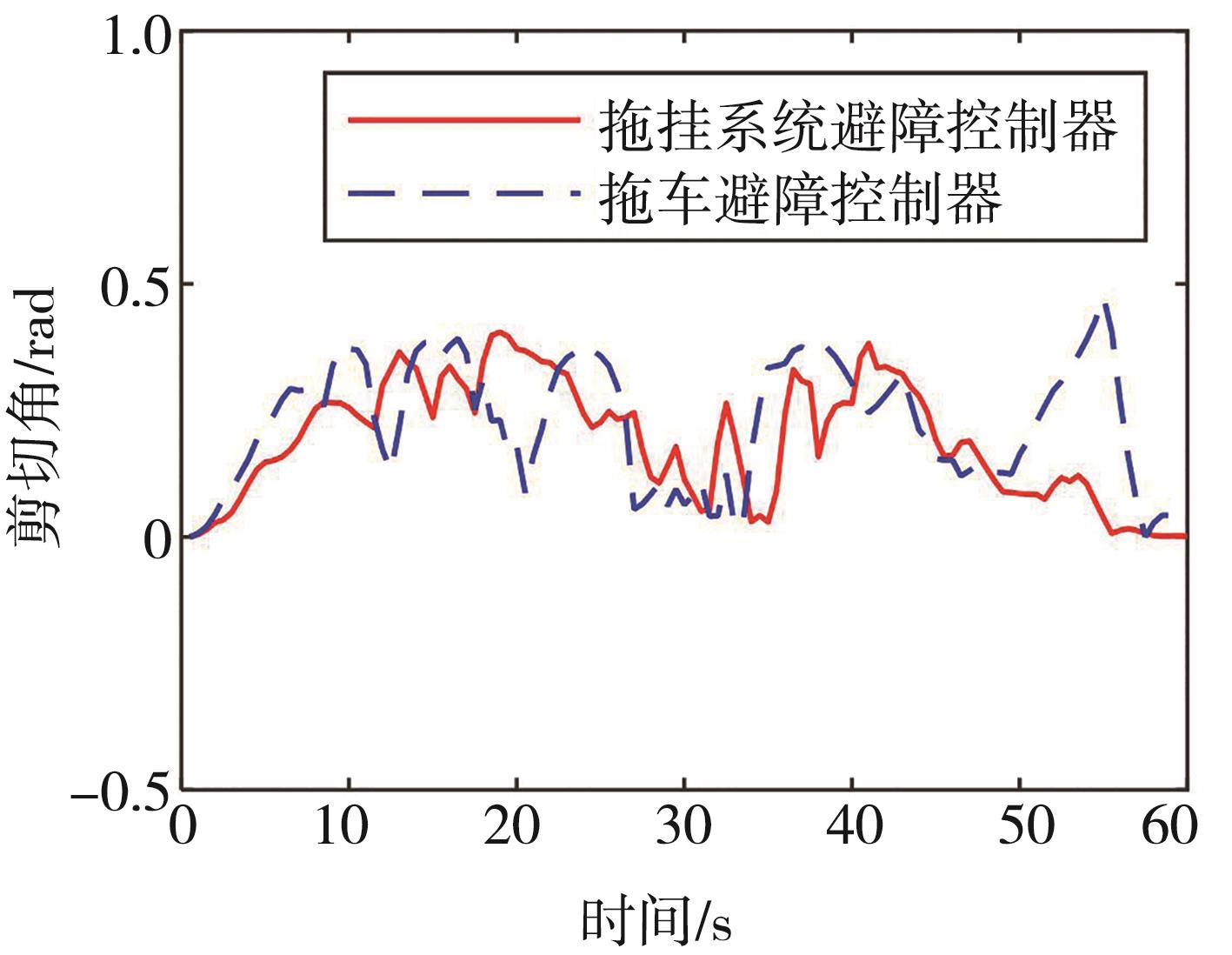
图16
动态场景下拖挂车辆主动避障足迹"
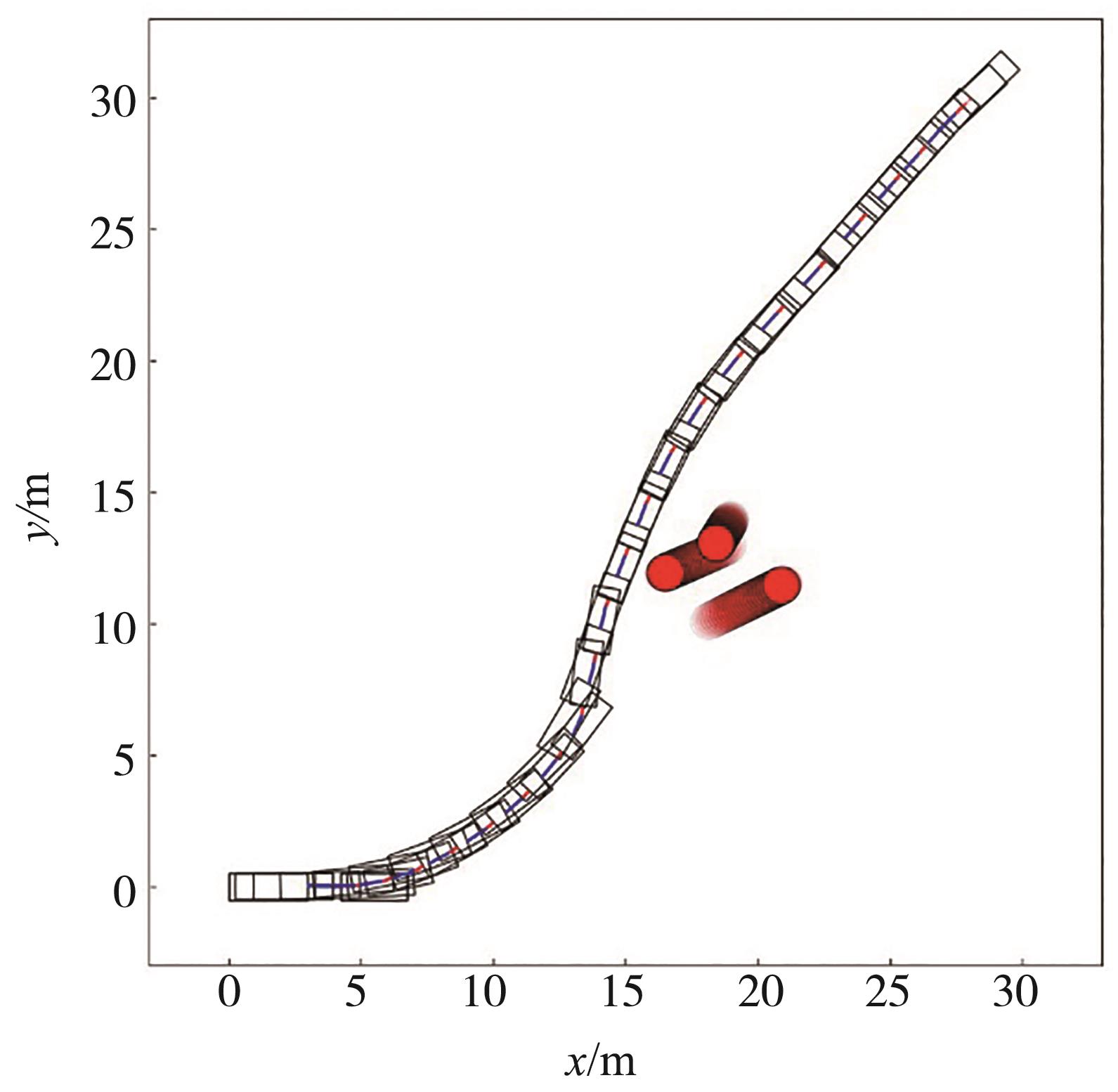
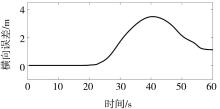
图17
全挂车避障路径与非避障最短路径的横向误差"
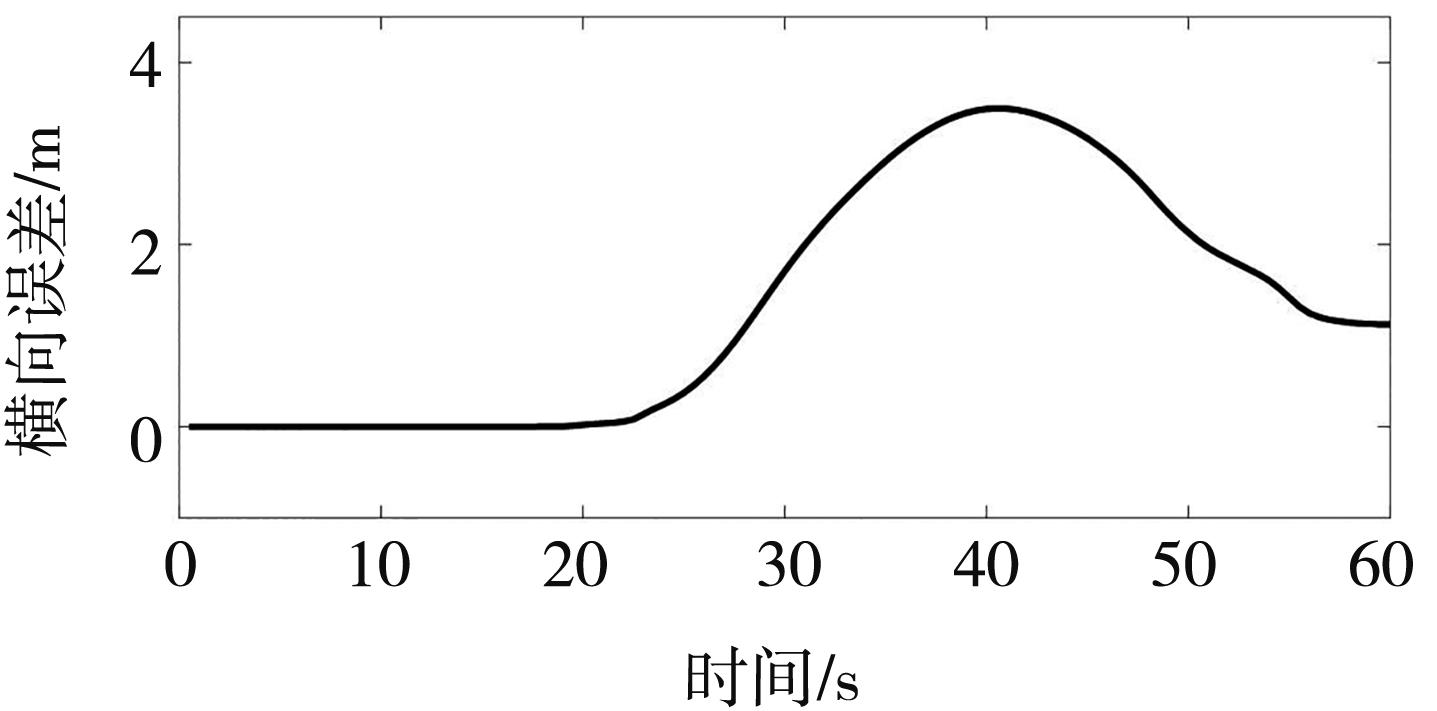
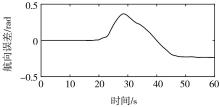
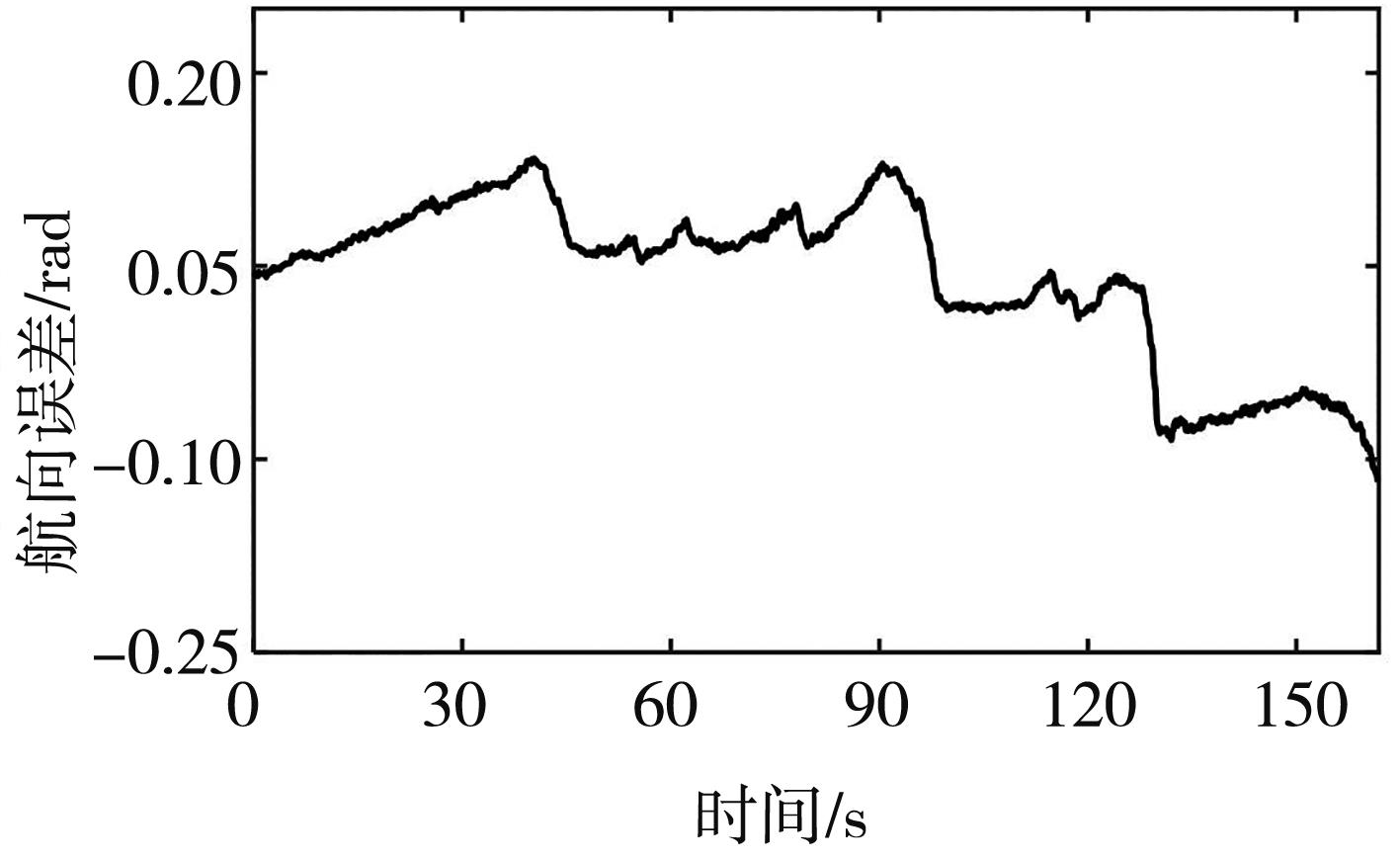
图18
全挂车避障路径与非避障最短路径的航向误差"
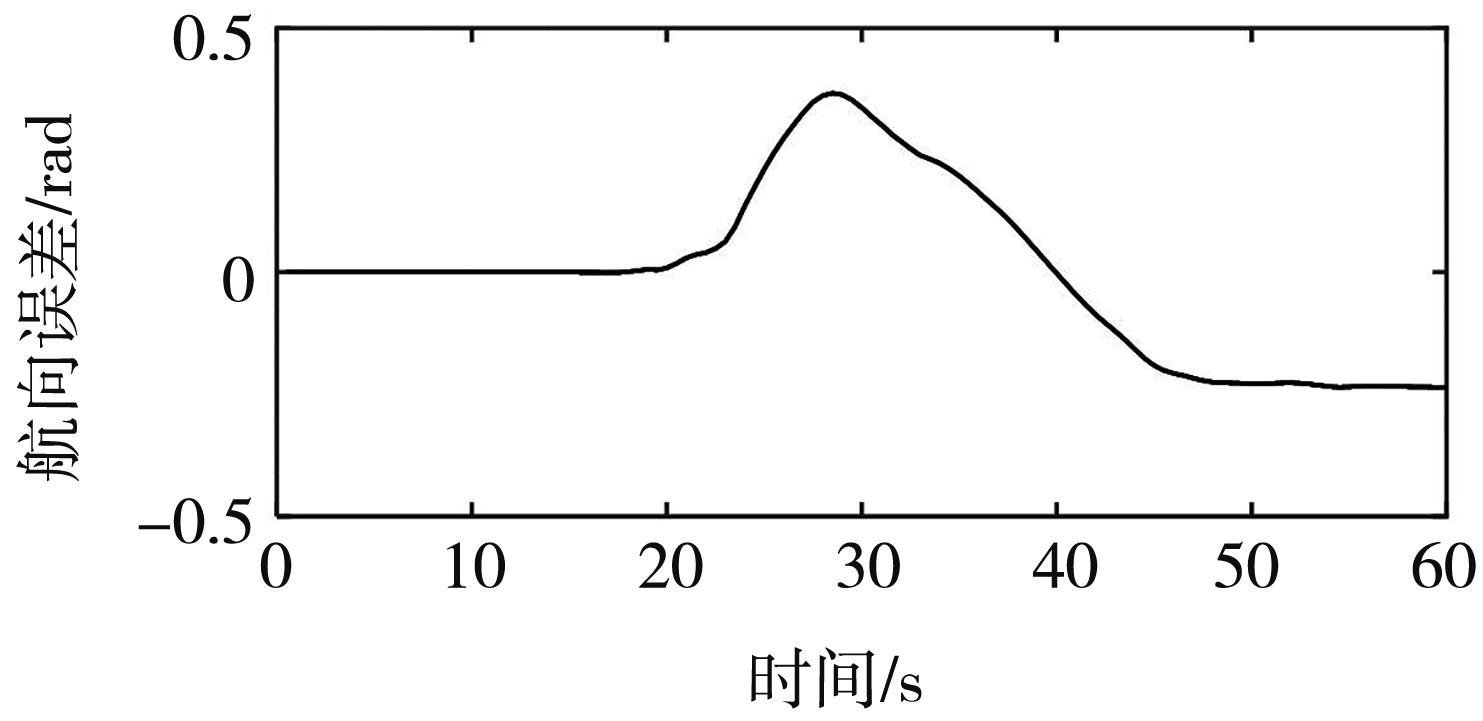
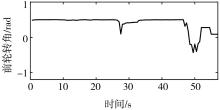
图19
拖挂车辆主动避障的控制量"
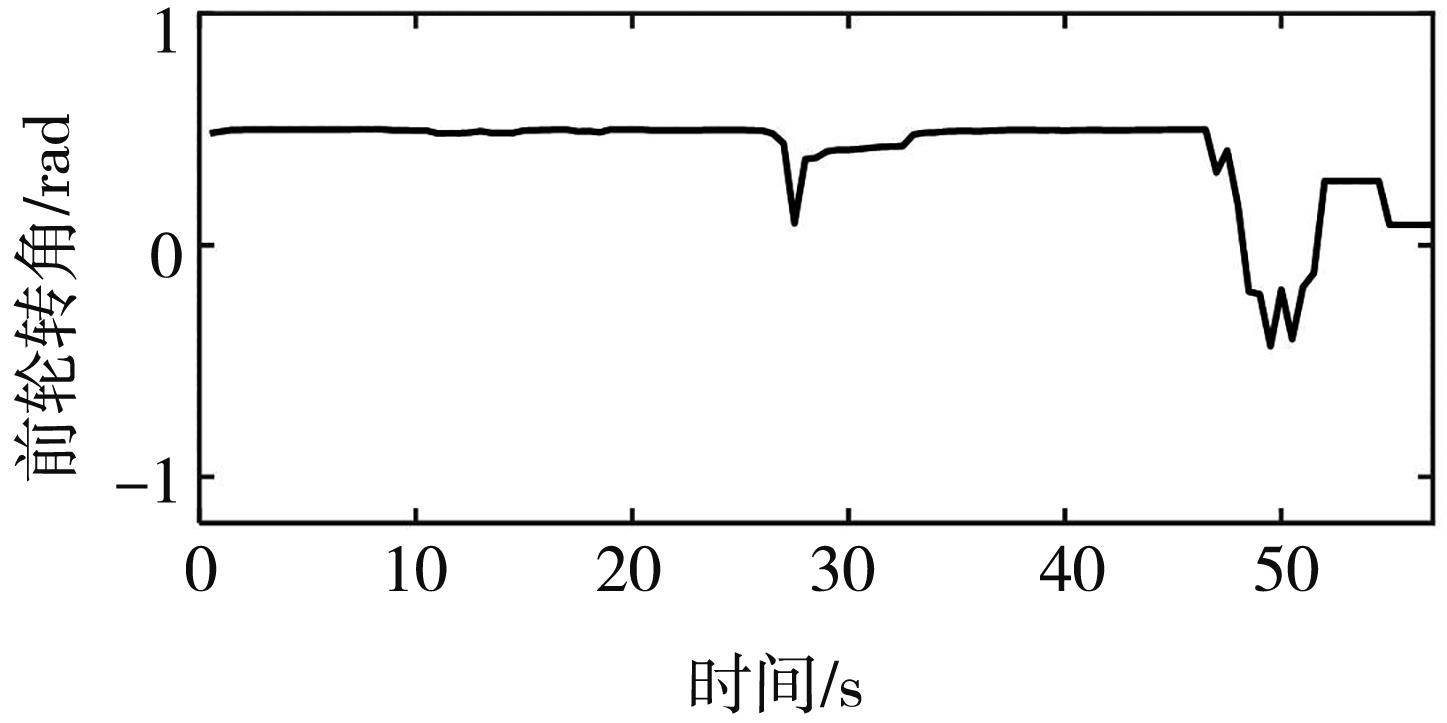
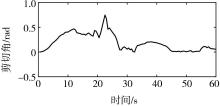
图20
拖挂车辆主动避障剪切角"
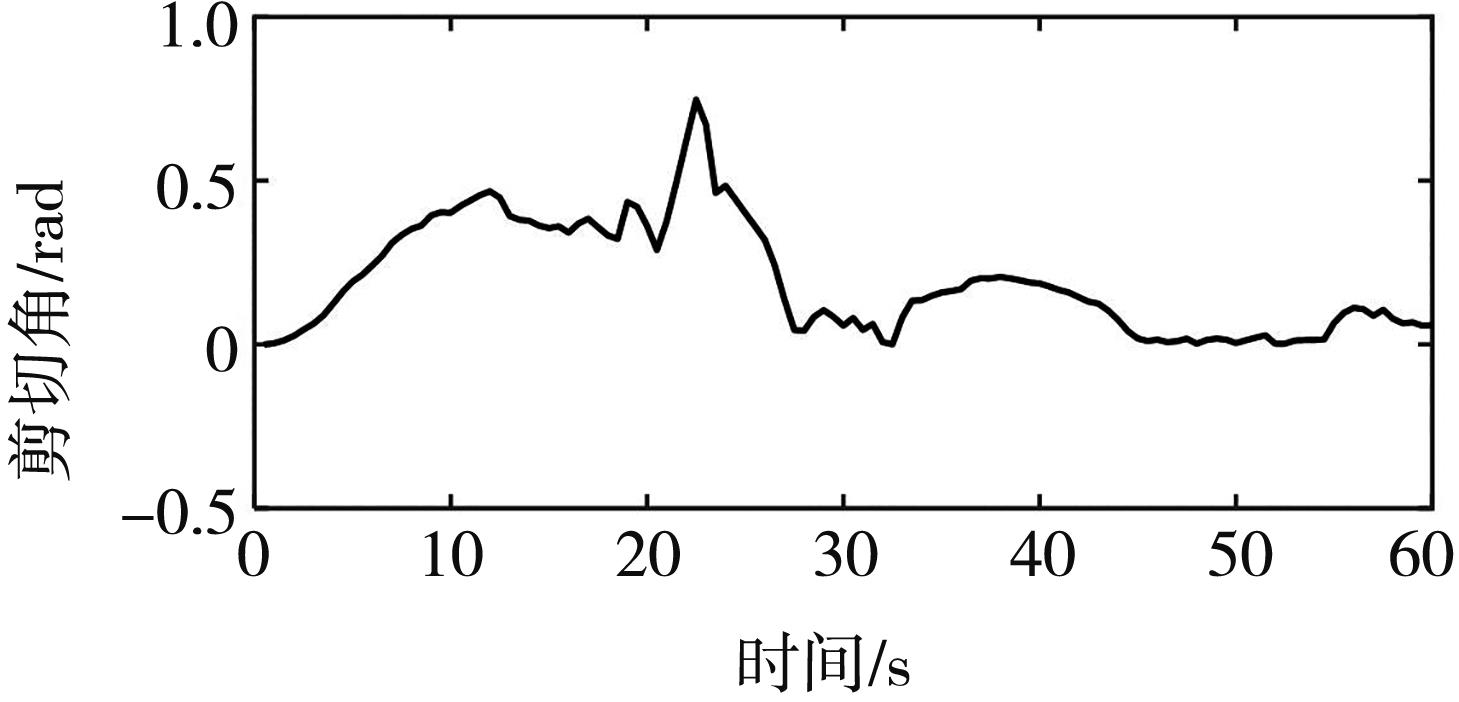
表3
拖挂系统与主动避障控制器参数"
| 参数 | 数值 |
|---|---|
牵引车轴距 全挂车轴距 牵引车后轴中点到铰接点距离 全挂车前轴中点到铰接点距离 牵引车宽 牵引车长 全挂车宽 全挂车长 角传动比 前轮转角变化速度/( 预测时域 控制时域 最大前轮转角 控制器采样间隔T/s 正数 障碍物碰撞膨胀距离rs/m 障碍物半径ro/m | 2.49 1.90 0.60 1.30 1.66 3.63 2.20 3.20 15.7 0.33 25 3 0.39 0.20 10-6 0.70 0.40 105、400、10、0.50 |

图21
拖挂系统主动避障实验平台及场景"

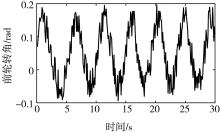
图22
带有随机噪声的正弦波控制量"
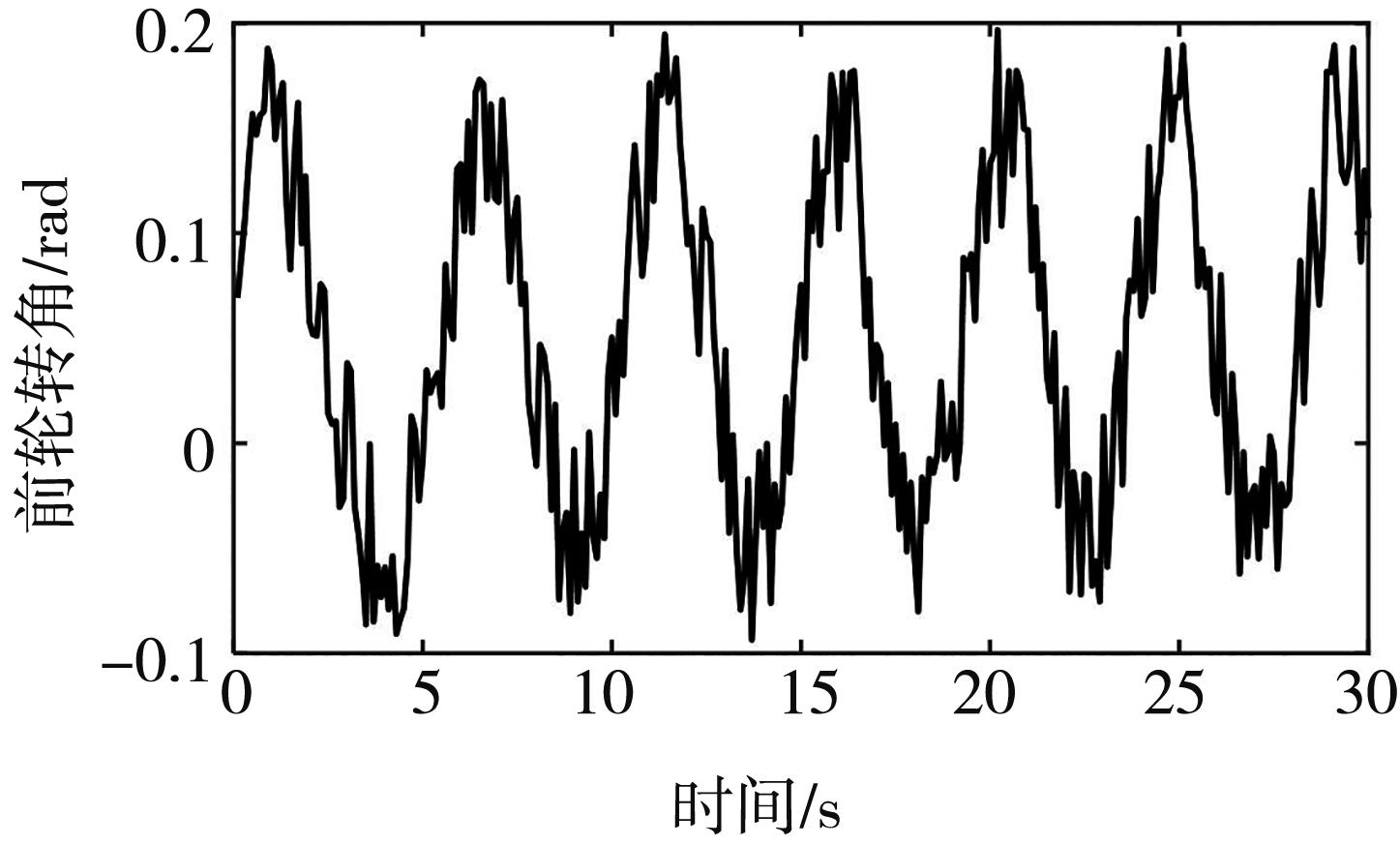
图23
正弦波控制量作用下拖挂车辆运动轨迹"

图24
拖挂系统主动避障过程"

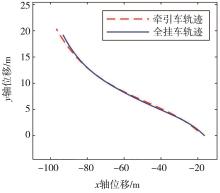
图25
静态场景下拖挂车辆主动避障轨迹"
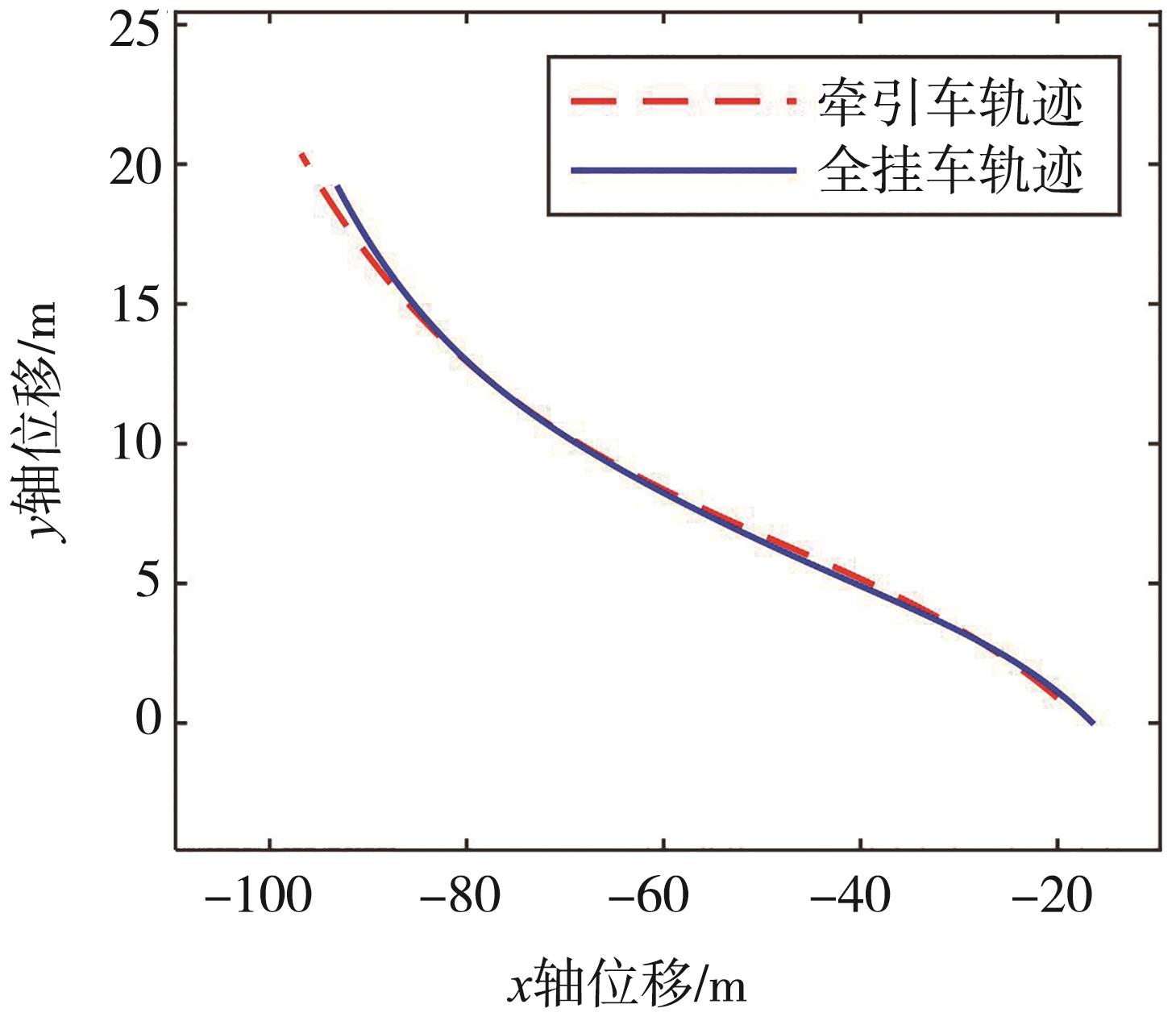
图26
拖挂车辆主动避障的控制量及状态量"
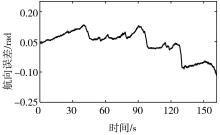
图27
实车实验全挂车避障路径与非避障最短路径的航向误差"
| 1 | BADUE C, GUIDOLINI R, CARNEIRO R V, et al. Self-driving cars: a survey[J]. Expert Systems with Applications, 2021, 165: 113816. |
| 2 | ZHAO H, ZHOU S, CHEN W, et al. Modeling and motion control of industrial tractor-trailers vehicles using force compensation[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 645-656. |
| 3 | RITZEN P, ROEBROEK E, VANDER WOUW N, et al. Trailer steering control of a tractor-trailer robot[J]. IEEE Trans Control Syst Technol, 2016,24(4):1240-1252. |
| 4 | 任玥, 郑玲, 张巍. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4):7. |
| REN Y, ZHANG L, ZHANG W. A study on active collision avoidance control of autonomous vehicles based on model predictive control[J]. Automotive Engineering, 2019, 41(4): 7. | |
| 5 | BERGMAN K, LJUNGQVIST O, AXEHILL D. Improved path planning by tightly combining lattice-based path planning and optimal control[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(1): 57-66. |
| 6 | WERLING M, ZIEGLER J, KAMMEL S, et al. Optimal trajectory generation for dynamic street scenarios in a frenet frame[C]. 2010 IEEE International Conference on Robotics and Automation. IEEE, 2010: 987-993. |
| 7 | YI B, BENDER P, BONARENS F, et al. Model predictive trajectory planning for automated driving[J]. IEEE Transactions on Intelligent Vehicles, 2018, 4(1): 24-38. |
| 8 | HUANG Y, DING H, ZHANG Y, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics, 2019, 67(2): 1376-1386. |
| 9 | 牛国臣,李文帅,魏洪旭.基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986. |
| NIU G C, LI W S, WEI H X. Intelligent vehicle lane changing trajectory planning based on double quintic polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. | |
| 10 | LIM W, LEE S, SUNWOO M, et al. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(2): 613-626. |
| 11 | MENG Y, WU Y, GU Q, et al. A decoupled trajectory planning framework based on the integration of lattice searching and convex optimization[J]. IEEE Access, 2019, 7: 130530-130551. |
| 12 | BAI G, LIANG C, MENG Y, et al. Obstacle avoidance of semi-trailers based on nonlinear model predictive control[J]. World Electric Vehicle Journal, 2019, 10(4): 72. |
| 13 | BERLIN J, HESS G, KARLSSON A, et al. Trajectory generation for mobile robots in a dynamic environment using nonlinear model predictive control[C]. 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE). IEEE, 2021: 942-947. |
| 14 | ASROFUDIN B, WIDYOTRIATMO A, SIREGAR P I, et al. Sigmoid function optimization for path following control with obstacle avoidance of an autonomous truck-trailer[C]. 2021 International Conference on Instrumentation, Control, and Automation (ICA). IEEE, 2021: 180-185. |
| 15 | 白国星,刘立,孟宇,等.基于非线性模型预测控制的农用拖挂车避障控制器研究[J].农业机械学报,2019,50(4):356-362. |
| BAI G X, LIU L, MENG Y, et al. Study of obstacle avoidance controller of agricultural tractor-trailers based on predictive control of nonlinear model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4):356-362. | |
| 16 | CHENG J, ZHANG Y, WANG Z. Motion planning algorithm for tractor-trailer mobile robot in unknown environment[C]. 2012 8th International Conference on Natural Computation. IEEE, 2012: 1050-1055. |
| 17 | HOLMER O. Motion planning for a reversing full-scale truck and trailer system[D]. Sweden: Linköping University, 2016. |
| 18 | WANG R, QIAN H, TAN X, et al. Difference of radius between inner wheels for vehicles on urban road and safety countermeasures[J]. Open Journal of Transportation Technologies, 2014, 3(3):72-79. |
| 19 | LJUNGQVIST O, EVESTRDT N, AXEHILL D, et al. A path planning and path‐following control framework for a general 2‐trailer with a car‐like tractor[J]. Journal of Field Robotics, 2019, 36(8): 1345-1377. |
| 20 | 张炳力,吕敏煜,程进,等.两点预瞄轨迹跟踪横向控制系统[J].电子测量与仪器学报,2019,33(5):158-163. |
| ZHANG B L, LYU M Y, CHENG J, et al. Track tracking lateral control system with two-point preview[J]. Journal of Electronic Measurement and Instrumentation, 2019,33(5):158-163. |
| [1] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [2] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [3] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [4] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [5] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [6] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [7] | 周兵,魏佳宝,柴天,吴晓建,王鹤. 基于最优方法的碰后辅助驾驶控制策略[J]. 汽车工程, 2023, 45(4): 561-571. |
| [8] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [9] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [10] | 贺林,徐子昂,黄春荣,龚超,李书华,石琴. 线控转向系统转角预测滑模控制算法研究[J]. 汽车工程, 2023, 45(12): 2200-2208. |
| [11] | 宋强,王冠峰,商赫,张念忠. 基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究[J]. 汽车工程, 2023, 45(11): 2104-2112. |
| [12] | 芦勇,何一超,田贺,江昆,杨殿阁. 面向量产的自适应巡航控制系统纵向加速度规划方法研究[J]. 汽车工程, 2023, 45(10): 1803-1814. |
| [13] | 林程,梁晟,宫新乐,于潇,汪博文. 面向极限工况的分布式驱动电动汽车动力学集成控制方法[J]. 汽车工程, 2022, 44(9): 1372-1385. |
| [14] | 解少博,屈鹏程,李嘉诚,王惠庆,郎昆. 跟驰场景中网联混合电动货车速度规划和能量管理协同控制的研究[J]. 汽车工程, 2022, 44(8): 1136-1143. |
| [15] | 彭理群,王依婷,马育林,许述财. 面向混合自动驾驶车流的协同自适应巡航控制[J]. 汽车工程, 2022, 44(8): 1153-1161. |
|