汽车工程 ›› 2022, Vol. 44 ›› Issue (8): 1136-1143.doi: 10.19562/j.chinasae.qcgc.2022.08.003
所属专题: 智能网联汽车技术专题-规划&控制2022年
解少博( ),屈鹏程,李嘉诚,王惠庆,郎昆
),屈鹏程,李嘉诚,王惠庆,郎昆
Shaobo Xie(),Pengcheng Qu,Jiacheng Li,Huiqing Wang,Kun Lang
摘要:
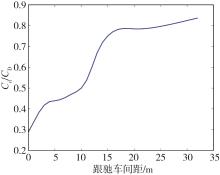
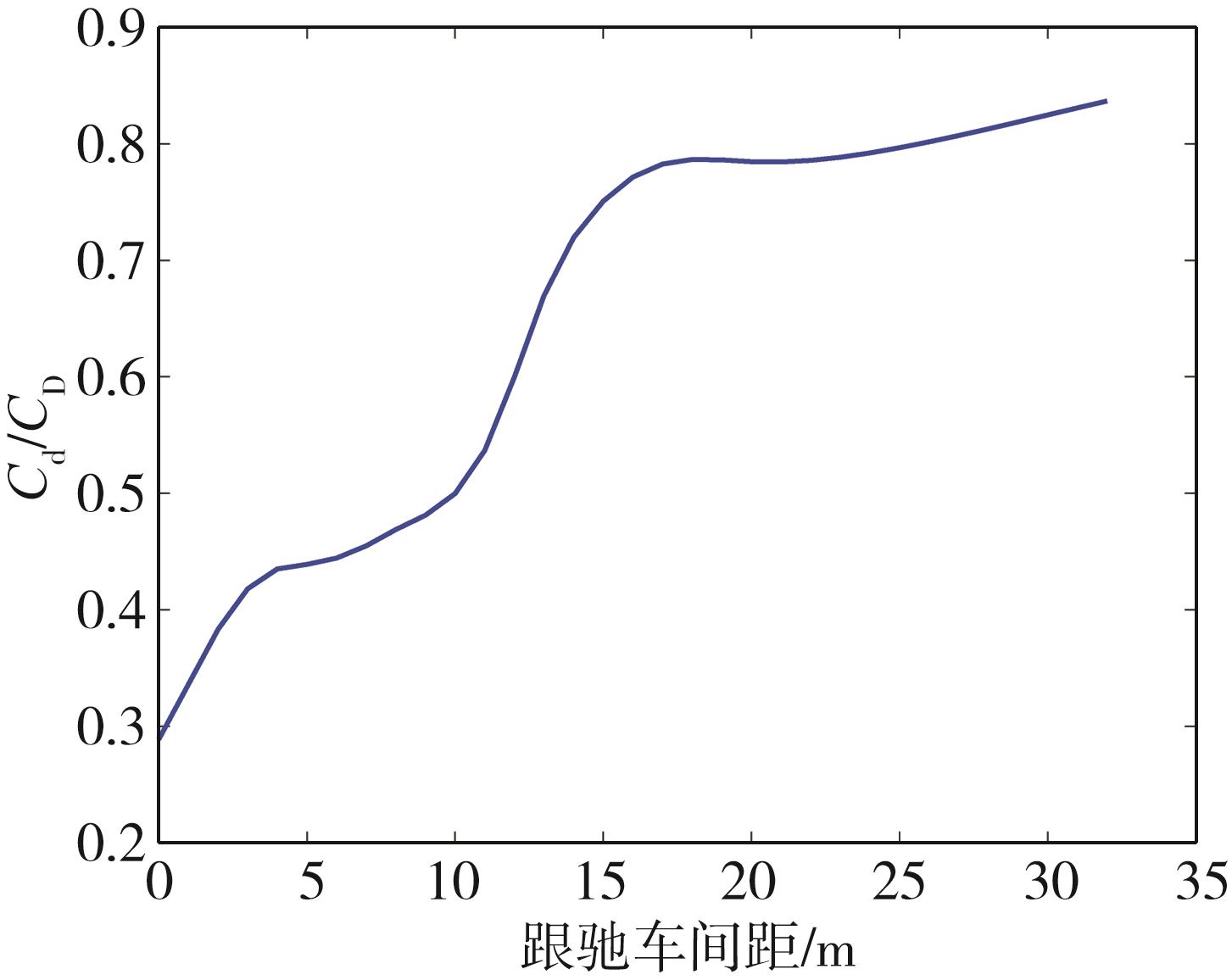
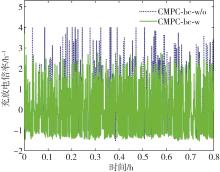
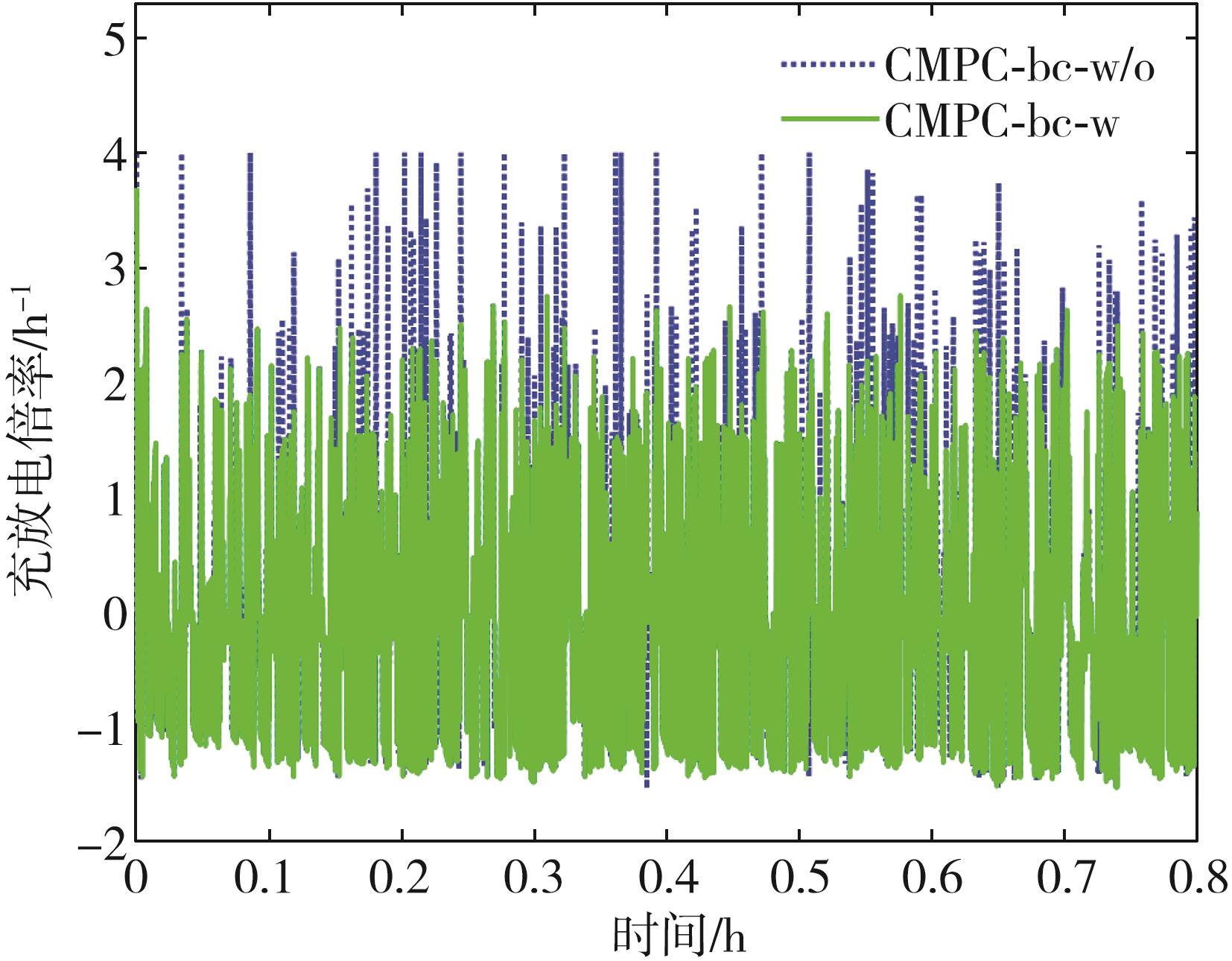
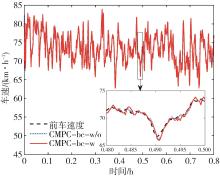
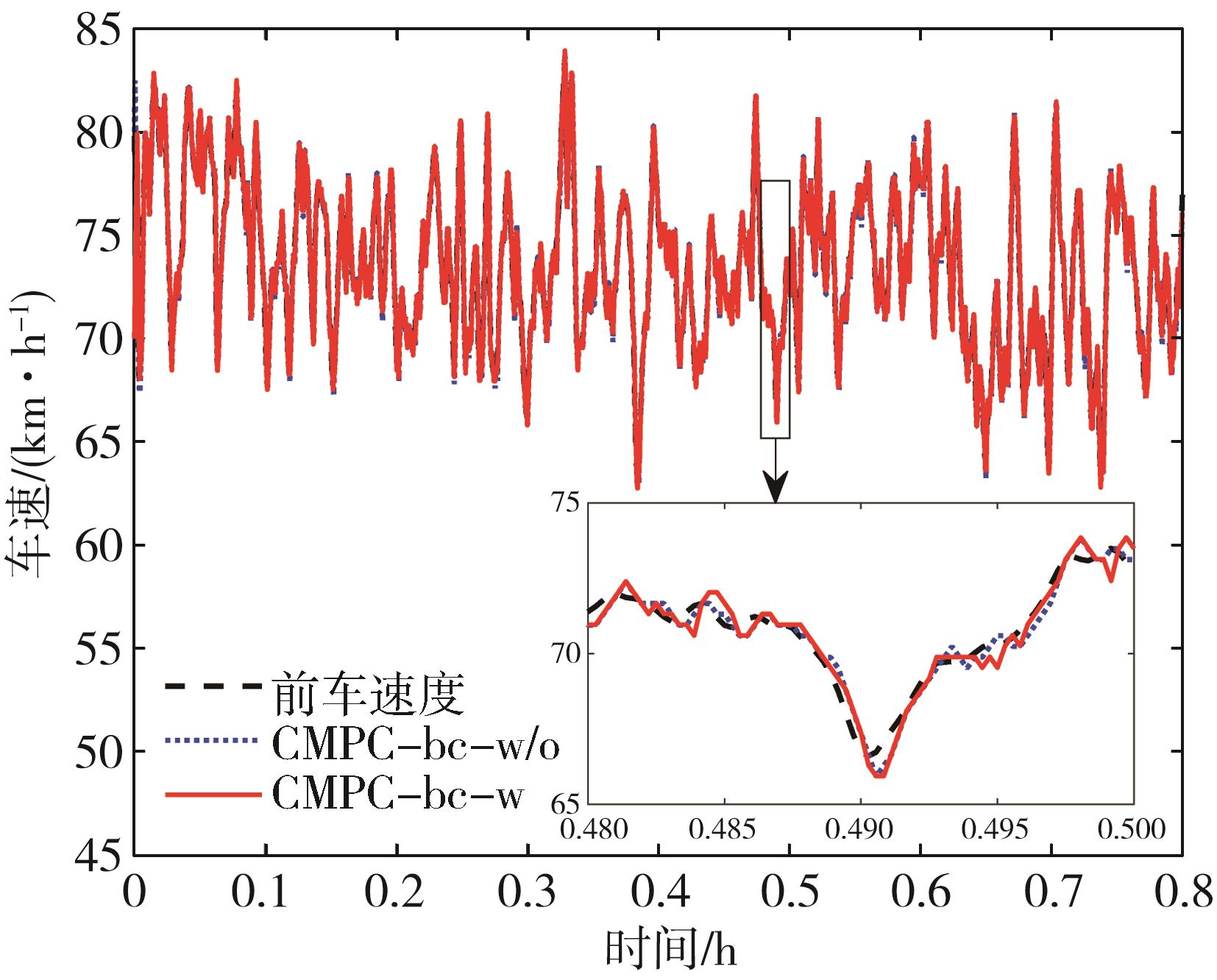
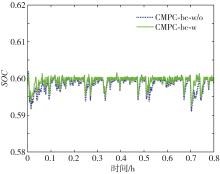
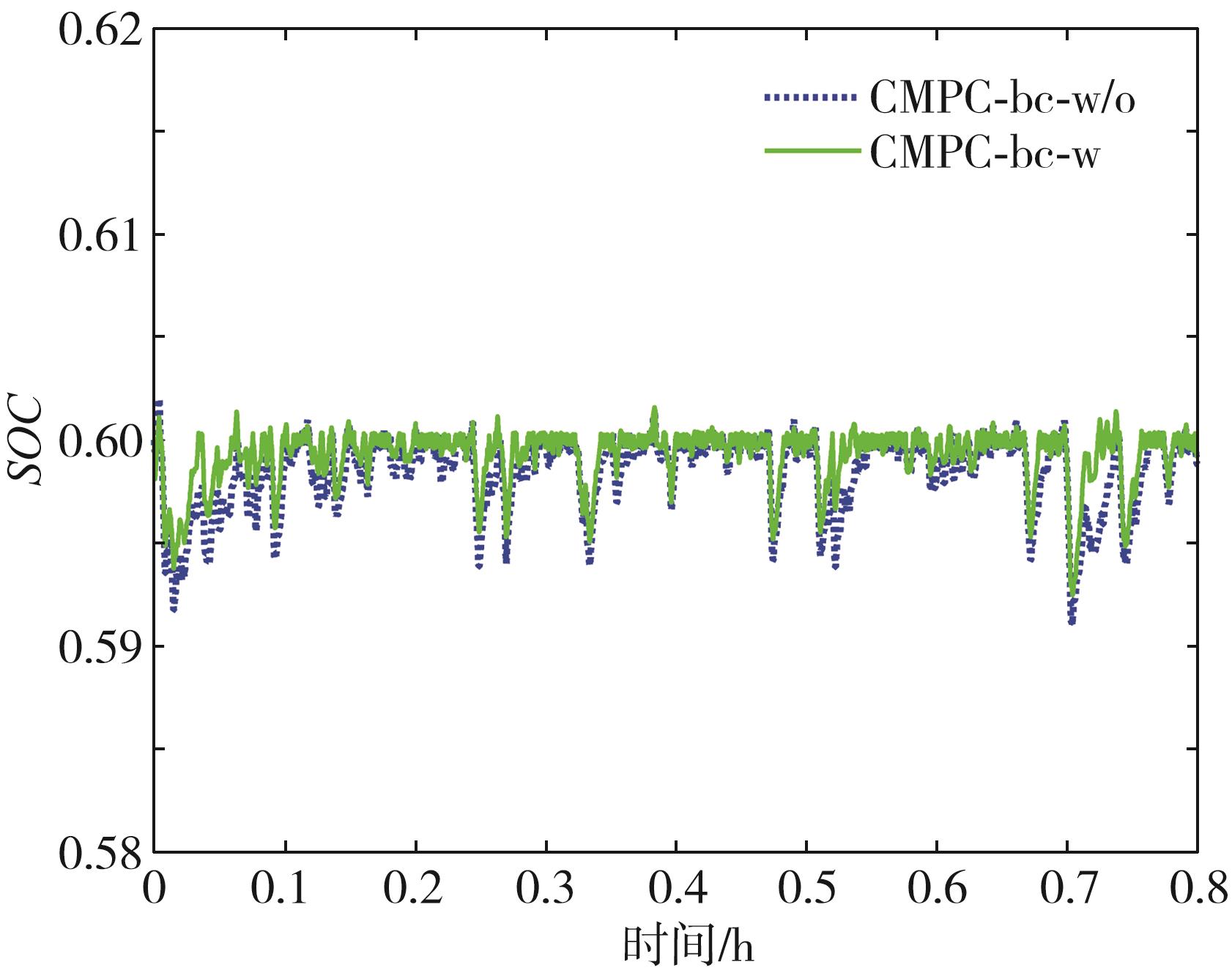
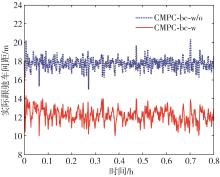
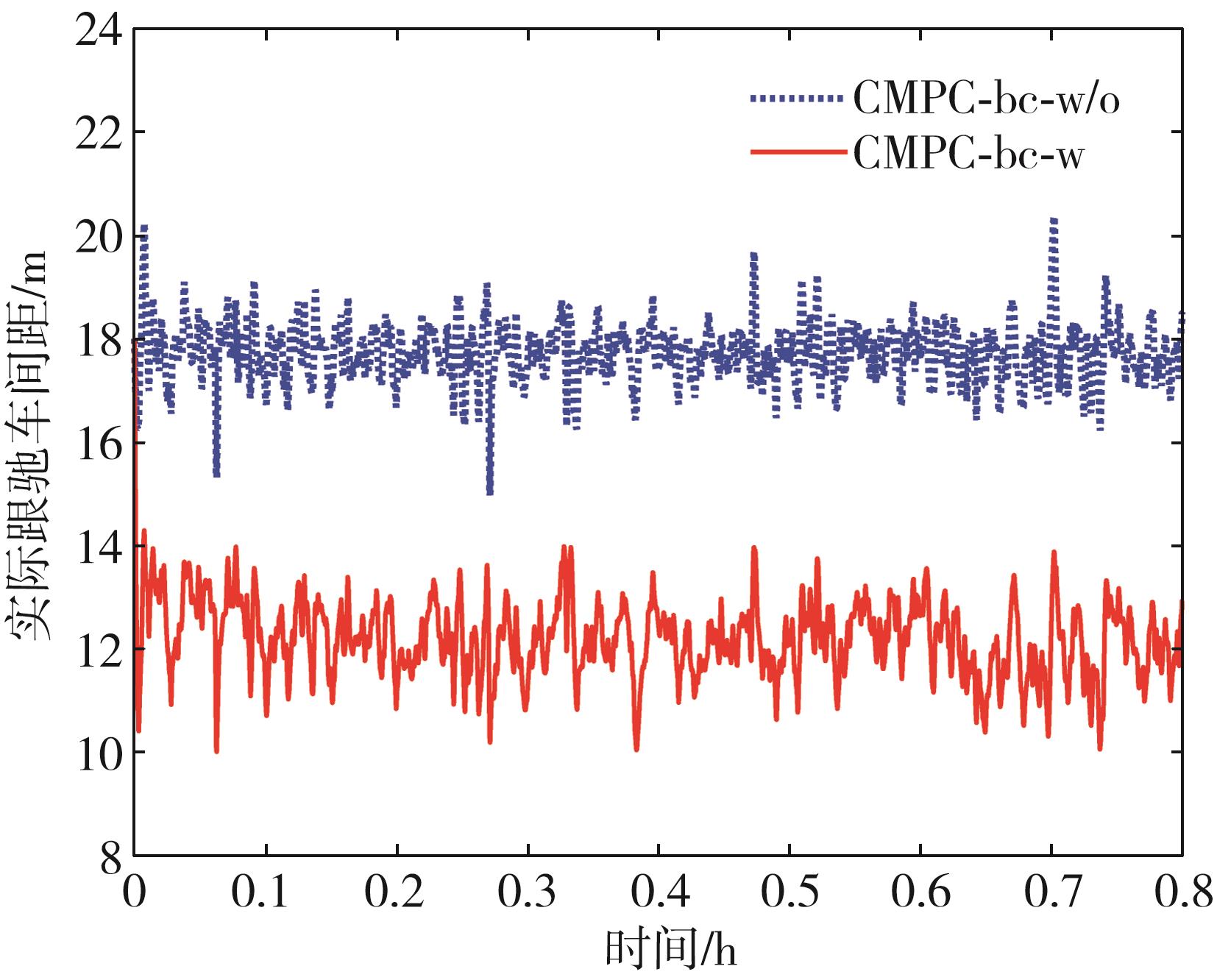
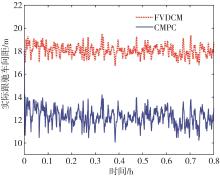
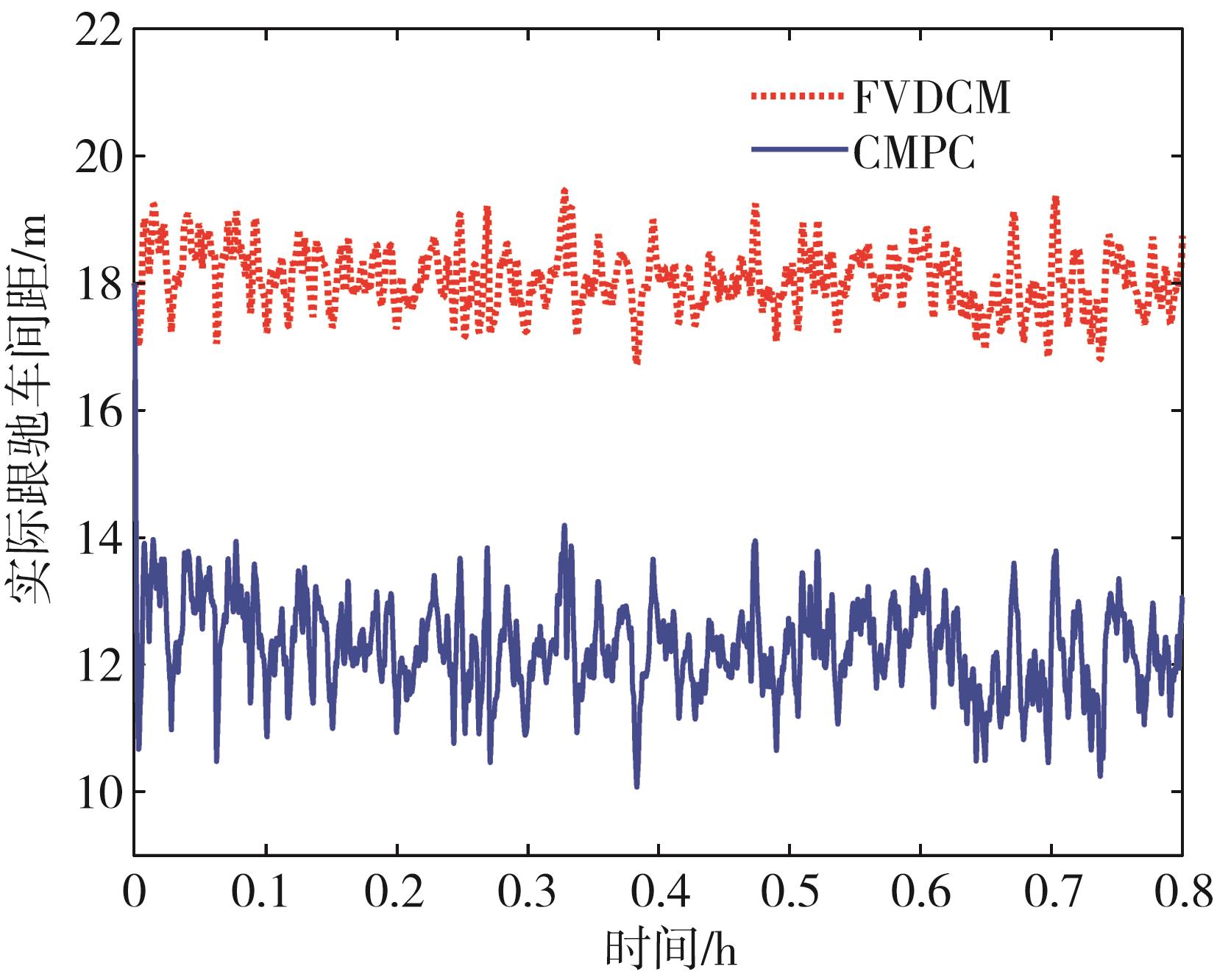
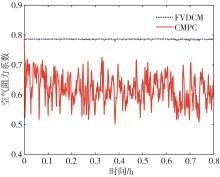
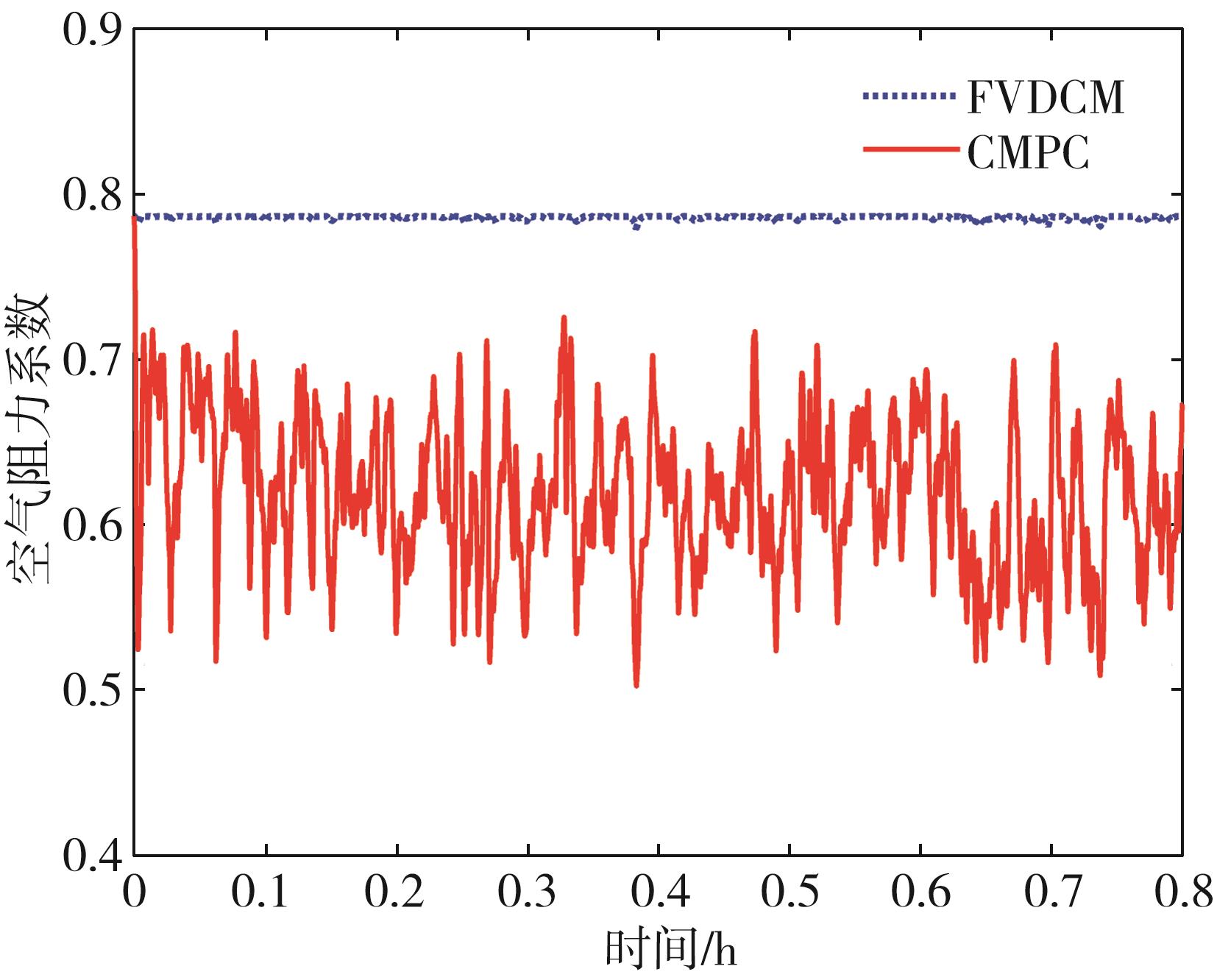
鉴于队列行驶中的网联混合动力货车(HET)的跟驰速度既涉及行车安全、能量需求与分配和电池老化速率,同时又通过车间距,影响气动阻力,以至能耗经济性,本文中提出跟驰场景下综合考虑行车安全性、能耗经济性、气动阻力和电池老化等多个目标的速度规划和能量管理协同控制策略。首先,基于空气动力学量化跟驰安全性。其次,以安全性成本、能耗成本和电池老化成本构成的等效总成本最小化为目标函数并基于模型预测控制构建实时控制策略。其中,采用长短时记忆神经网络对前车速度进行预测,并采用动态规划求解滚动时域内的优化问题。结果表明,协同控制策略能通过抑制动力电池充放电电流来降低电池老化成本,以及借助灵活调整跟驰距离来减小气动阻力并降低能耗成本。与基于人类驾驶模型的跟驰策略进行对比,结果验证了协同控制策略的可行性。