| 1 |
宋健, 王伟玮, 李亮, 等. 汽车安全技术的研究现状和展望[J]. 汽车安全与节能学报, 2010, 1(2): 98-106.
|
|
SONG J, WANG W J, LI L, et al. Research status and prospects of automotive safety technology[J]. Journal of Automotive Safety and Energy, 2010, 1(2): 98-106.
|
| 2 |
YANG D R, GORDON T J, JACOBSON B, et al. Quasi-linear optimal path controller applied to post impact vehicle dynamics [J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1586-1598.
|
| 3 |
YUAN H, GORDON T, SUN X. Unified decision-making and control for highway collision avoidance using active front steer and individual wheel torque control [J]. Vehicle System Dynamics, 2019, 57(8): 1188-1205.
|
| 4 |
CUI Q J, DING R J, WU X J, et al. A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving [J]. Vehicle System Dynamics, 2020, 58(6): 955-986.
|
| 5 |
FUNKE J, BROWN M, ERLIEN S M, et al. Collision avoidance and stabilization for autonomous vehicles in emergency scenarios [J]. IEEE Transactions on Control Systems Technology, 2017, 25(4): 1204-16.
|
| 6 |
JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints [J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-64.
|
| 7 |
许男, 李小雨. 复合工况下四轮驱动电动汽车操纵稳定性控制 [J]. 机械工程学报, 2021, 57(8): 205-220.
|
|
XU N, LI X Y. Handling and stability control of four-wheel drive electric vehicle under combined slip conditions[J]. Journal of Mechanical Engineering, 2021, 57(8): 205-220.
|
| 8 |
HOU R F, ZHAI L, SUN T M. Steering stability control for a four hub-motor independent-drive electric vehicle with varying adhesion coefficient [J]. Energies, 2018, 11(9).
|
| 9 |
WU X J, ZHOU B, WEN G L, et al. Intervention criterion and control research for active front steering with consideration of road adhesion [J]. Vehicle System Dynamics, 2018, 56(4): 553-578.
|
| 10 |
YANG D, GORDON T, JACOBSON B. An optimal path controller minimizing longitudinal and lateral deviations after light collisions[C]. International IEEE Conference on Intelligent Transportation Systems.IEEE, 2013.
|
| 11 |
AO D, HUA X, YU G, et al. Robust active post-impact motion control for restraining a second crash[C]. 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE).IEEE, 2020.
|
| 12 |
WANG C, YU H, ZHANG L, et al. Post-impact stability control for four-wheel-independently-actuated electric vehicles[C]. 2020 Chinese Automation Congress (CAC), 2020 .
|
| 13 |
WANG X, WANG P, WANG F, et al. Stability and trajectory control for post-impact vehicle based on fuzzy PID algorithm[C]. 2019 Chinese Control Conference (CCC), 2019.
|
| 14 |
宗长富, 代昌华. 智能汽车的人机共驾技术研究现状和发展趋势[J]. 中国公路学报, 2021, 34(6): 24.
|
|
ZONG C F,DAI C H.Human-machine interaction technology of intelligent vehicles:current development trends and future directions[J]. China Journal of Highway and Transport, 2021, 34(6): 24.
|
| 15 |
杨阳. 基于滑模变结构控制理论的AFS与DYC集成控制[D].长沙: 湖南大学, 2017.
|
|
YANG Y. Integrated control of AFS and DYC based on sliding mode variable structure control theory [D].Changsha: Hunan University, 2017.
|
| 16 |
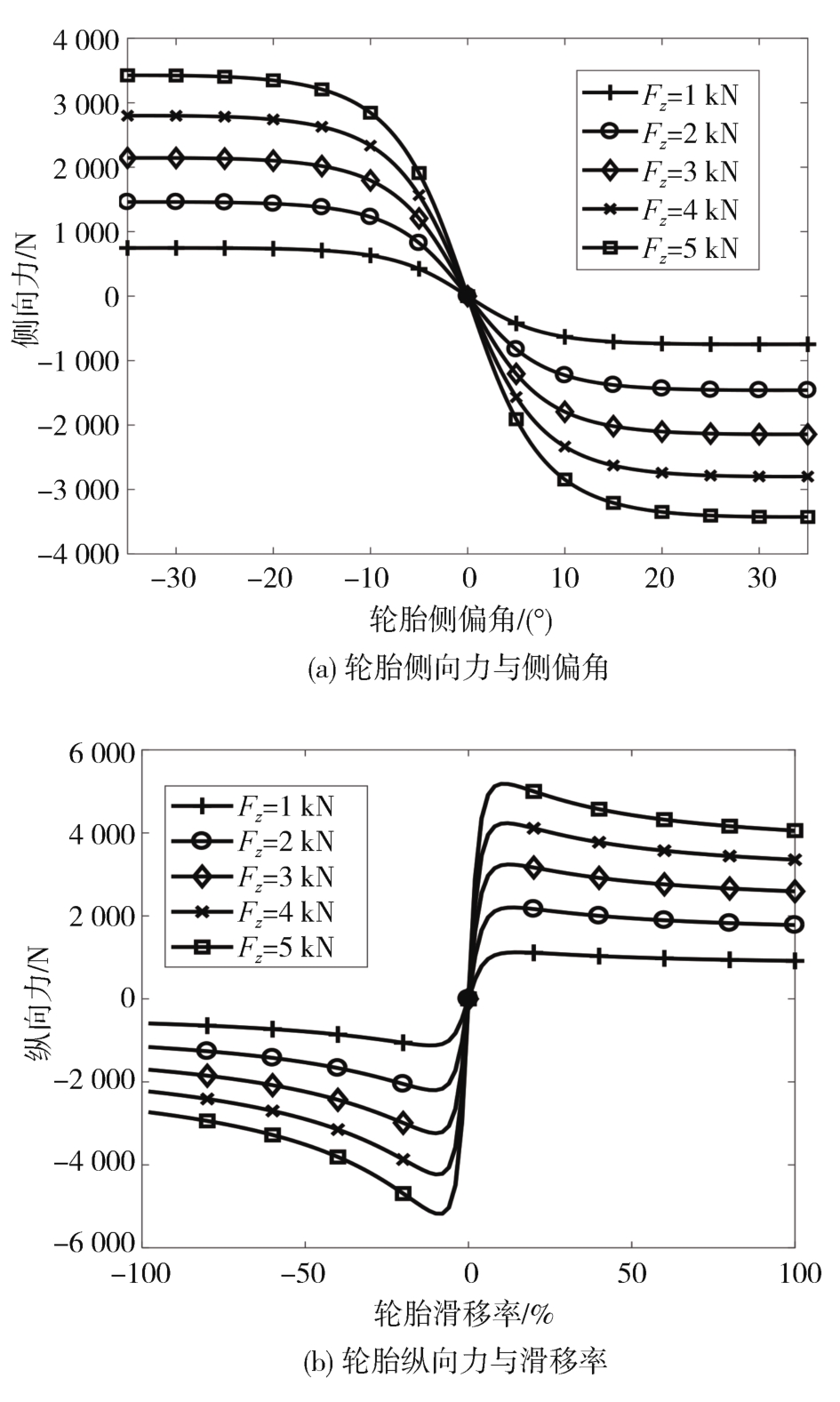
BAKKER E, NYBORG L, PACEJKA H B. Tyre modeling for use in vehicle dynamics studies [C]. SAE Paper 870421.
|
| 17 |
YANG D, GORDON T J, JACOBSON B, et al. Optimized brake-based control of path lateral deviation for mitigation of secondary collisions [J]. Proc Inst Mech Eng Part D-J Automob Eng, 2011, 225(D12): 1587-1604.
|
| 18 |
YANG D. Vehicle dynamics control after impacts in multiple-event accidents [C]. Chalmers University of Technology, 2013.
|
| 19 |
ZHAI L, SUN T, JIE W J I T O V T. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle [J]. IEEE Transactions on vehicnlar Technology, 2016, 65(6): 4726-4739.
|
| 20 |
王星宇. 汽车碰后稳定性控制方法研究 [D]. 长春: 吉林大学, 2020.
|
|
WANG X Y. Vehicle stability control after impact[D]. Changchun: Jilin University,2020.
|
| 21 |
龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制 [M]. 北京:北京理工大学出版社, 2014.
|
|
GONG J W,JIANG Y,XU W.Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press. 2014.
|
| 22 |
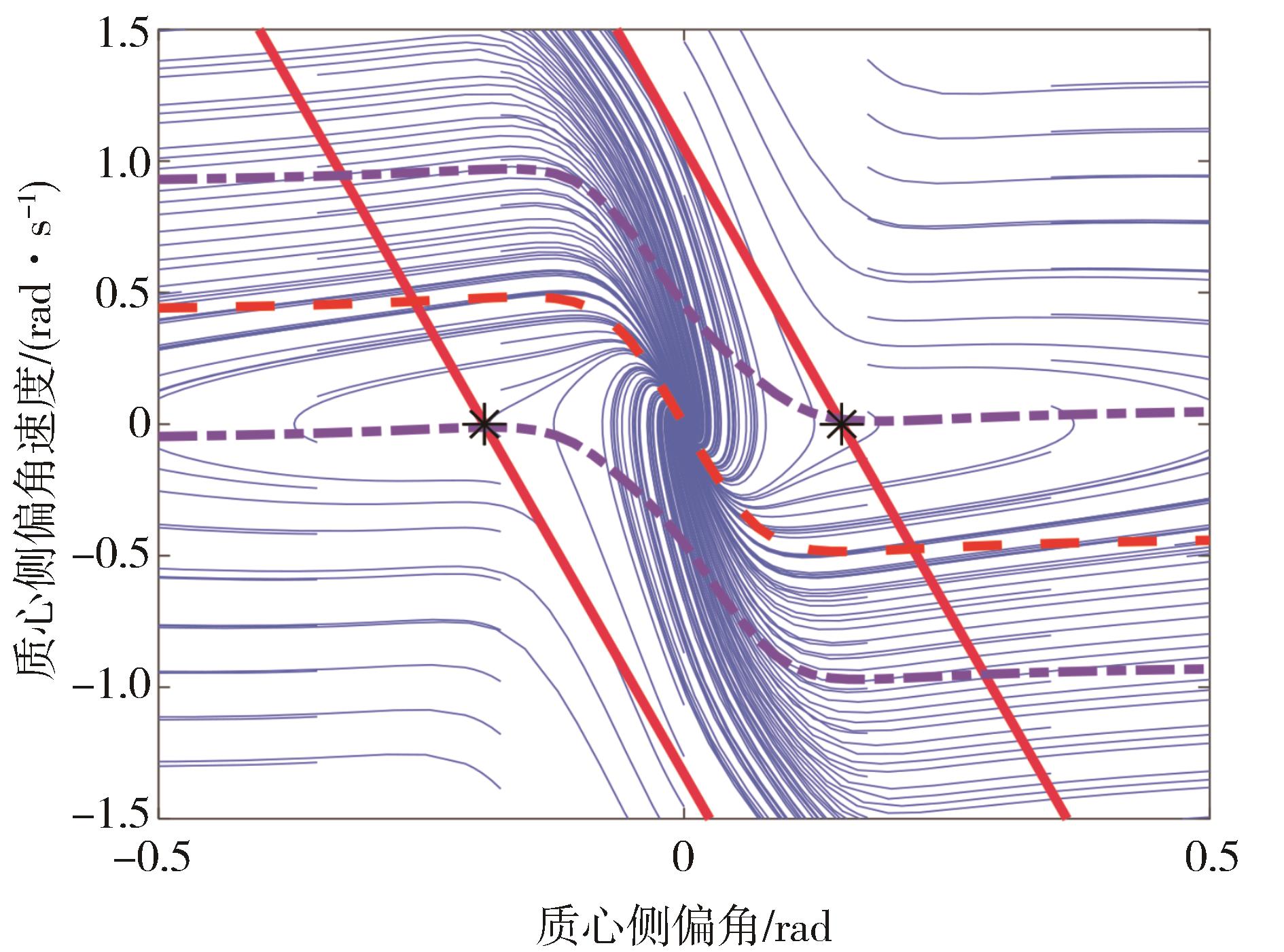
高月磊. 基于相平面稳定域边界的轻型车稳定性控制研究 [D]. 长春: 吉林大学, 2013.
|
|
GAO Y L. Stability control study based on the stability boundary of phase plane for light vehicle[D]. Changchun: Jilin University,2013.
|
| 23 |
金辉, 李世杰. 基于极限车速的车辆稳定性控制研究 [J]. 汽车工程, 2018, 40(1): 48-56.
|
|
JIN H, LI S J. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018, 40(1): 48-56.
|
| 24 |
余卓平, 冷搏, 熊璐, 等. 双线法与横摆角速度法联合的车辆稳定性判据 [J].同济大学学报(自然科学版),2015, 43(12):1841-1849.
|
|
YU Z P, LENG B, XIONG L, et al. Vehicle sideslip angle and yaw rate joint criterion for vehicle stability control[J]. Journal of Tongji University(Natural Science), 2015, 43(12): 1841-1849.
|
 ),魏佳宝1,柴天1,吴晓建2,王鹤1
),魏佳宝1,柴天1,吴晓建2,王鹤1