汽车工程 ›› 2022, Vol. 44 ›› Issue (8): 1153-1161.doi: 10.19562/j.chinasae.qcgc.2022.08.005
所属专题: 智能网联汽车技术专题-规划&控制2022年
彭理群1,2,王依婷1,马育林2,许述财3( )
)
Liqun Peng1,2,Yiting Wang1,Yulin Ma2,Xü Shucai3()
摘要:
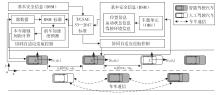
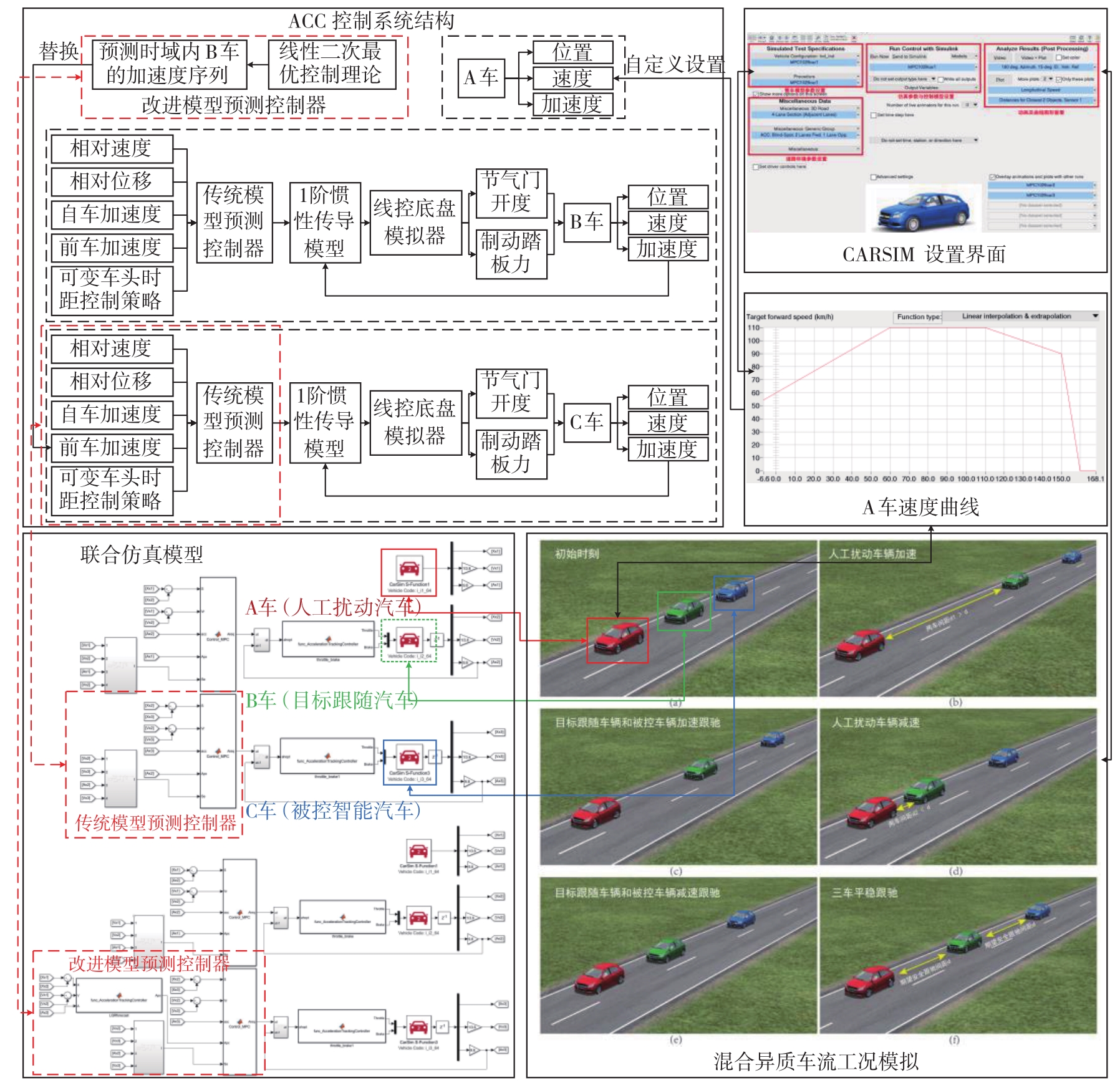
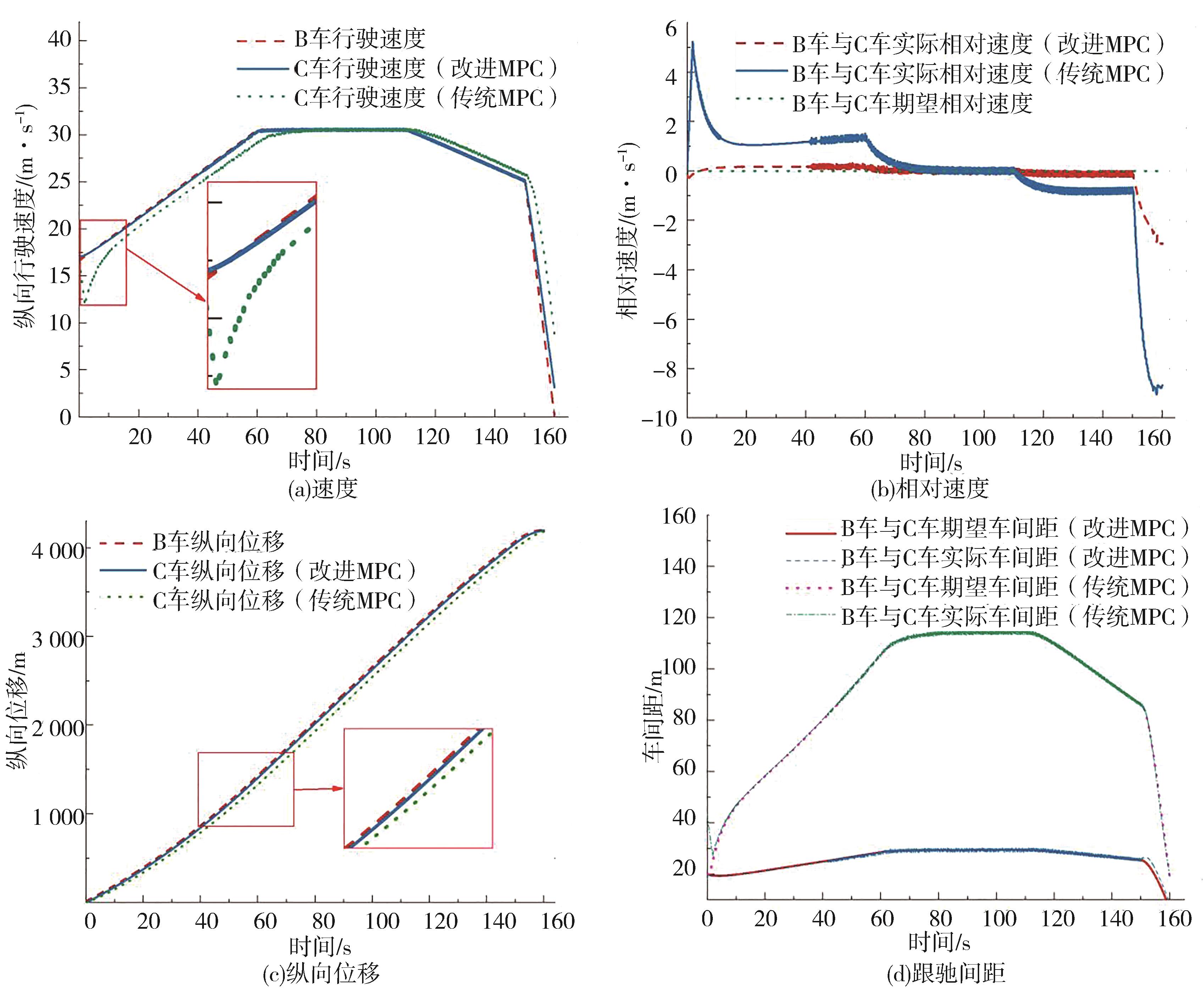
车联网V2V环境下能实时获取自车和周围车辆的运动状态、驾驶工况和道路环境,为汽车自适应巡航控制系统提供更准确的信息。为消除自动驾驶汽车(AV)和人工驾驶汽车(MV)混合行驶工况下的车头时距干扰对汽车纵向巡航控制的影响,提出了一种基于车联网V2V的协同自适应控制方法。通过车联网V2V实时采集车辆跟驰过程中车辆基本安全信息(basic safety message,BSM),进而获得车辆相对运动状态和驾驶行为序列;应用线性最优二次型方法建立驾驶操纵序贯链优化目标函数,再对扰动作用下的汽车运动状态改变量进行短时预测;在此基础上,以混合车流车头时距的最优均衡状态为目标,构建了车辆跟驰间距的滚动优化模型和协同自适应控制方法。实验结果表明,在头车加/减速行驶工况下,改进后的车辆控制器能更快响应前车运动状态的变化量,并在保证车辆安全跟驰间距的情况下,降低了车头时距,提高了道路通行能力。