汽车工程 ›› 2021, Vol. 43 ›› Issue (2): 153-161.doi: 10.19562/j.chinasae.qcgc.2021.02.001
• • 下一篇
陈龙1,邹凯2,蔡英凤1( ),滕成龙2,孙晓强1,王海2
),滕成龙2,孙晓强1,王海2
收稿日期:2020-04-22
修回日期:2020-07-08
出版日期:2021-02-25
发布日期:2021-03-04
通讯作者:
蔡英凤
E-mail:caicaixiao0304@126.com
基金资助:
Long Chen1,Kai Zou2,Yingfeng Cai1(),Chenglong Teng2,Xiaoqiang Sun1,Hai Wang2
Received:2020-04-22
Revised:2020-07-08
Online:2021-02-25
Published:2021-03-04
Contact:
Yingfeng Cai
E-mail:caicaixiao0304@126.com
摘要:
本文中针对大曲率转弯工况下,智能汽车纵横向动力学特性的耦合和动力学约束导致轨迹跟踪精度和稳定性下降的问题,提出一种基于非线性模型预测控制(NMPC)的纵横向综合轨迹跟踪控制方法,通过NMPC和障碍函数法(BM)的有效结合,提高了跟踪精度,改善了行驶稳定性。首先建立四轮驱动-前轮转向智能汽车动力学模型和轨迹跟踪模型,采用非线性模型预测控制计算出期望的纵向力、侧向力和横摆力矩;然后基于轮胎动力学模型建立带约束的非线性规划数学模型,利用障碍函数法求解出四轮轮胎力的最优分配,并最终实现四轮驱动智能汽车纵横向综合轨迹跟踪控制。最后进行Carsim和Simulink联合仿真,结果表明,与传统的预瞄PID控制相比,所提方法可在考虑纵横向动力学耦合的情况下明显改善跟踪精度和行驶稳定性。
陈龙,邹凯,蔡英凤,滕成龙,孙晓强,王海. 基于NMPC的智能汽车纵横向综合轨迹跟踪控制[J]. 汽车工程, 2021, 43(2): 153-161.
Long Chen,Kai Zou,Yingfeng Cai,Chenglong Teng,Xiaoqiang Sun,Hai Wang. Longitudinal and Lateral Comprehensive Trajectory Tracking Control of Intelligent Vehicles Based on NMPC[J]. Automotive Engineering, 2021, 43(2): 153-161.
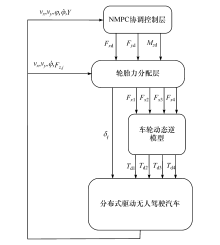
图 1
分层控制流程图"

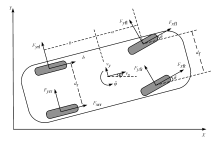
图2
平面运动车辆模型"
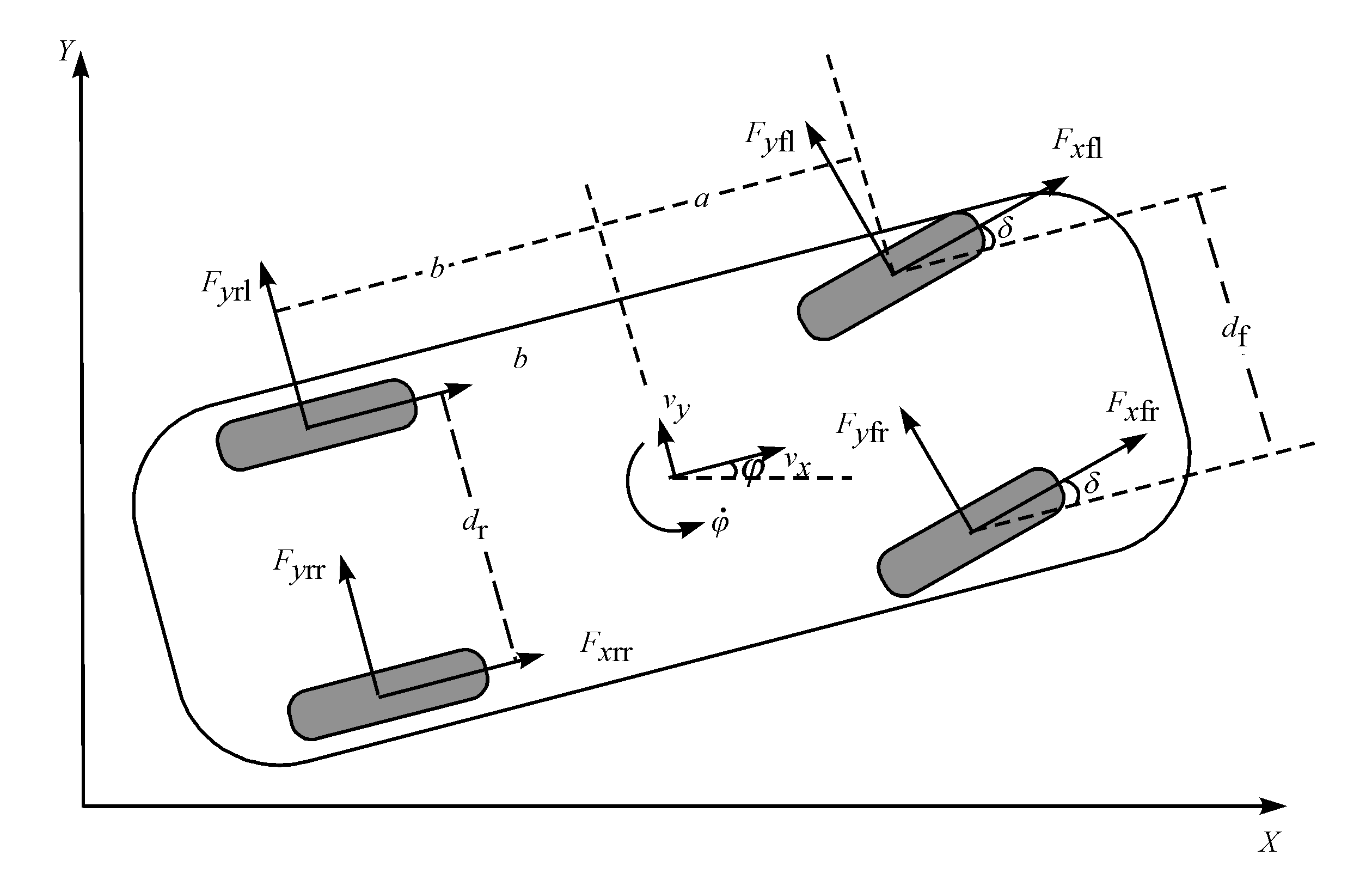
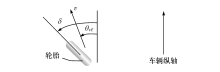
图3
轮胎侧偏角"

表1
整车参数"
| 参数 | 数值 |
|---|---|
| 车辆质量m/kg | 1 723 |
| 绕Z轴转动惯量Iz/(kg·m2) | 4 175 |
| 轴距a,b/m | 1.232, 1.468 |
| 轮距df, dr/m | 1.85, 1.85 |
| 车辆原始点坐标 | (0,0) |
表2
控制器参数"
| 参数 | 数值 |
|---|---|
| 预测时域 | 10 |
| 控制时域 | 5 |
| 采样时间 | 0.05 |
| 平衡因子 | 0.85 |
| 控制量权重 | 106·diag[1 1 Wm] |
| 控制增量权重 | 106·diag[1 1 Wm] |
| 输出量权重 | diag[108 107 104] |
| 松弛因子权重 | 105 |
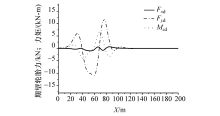
图4
上层协调控制层输出"
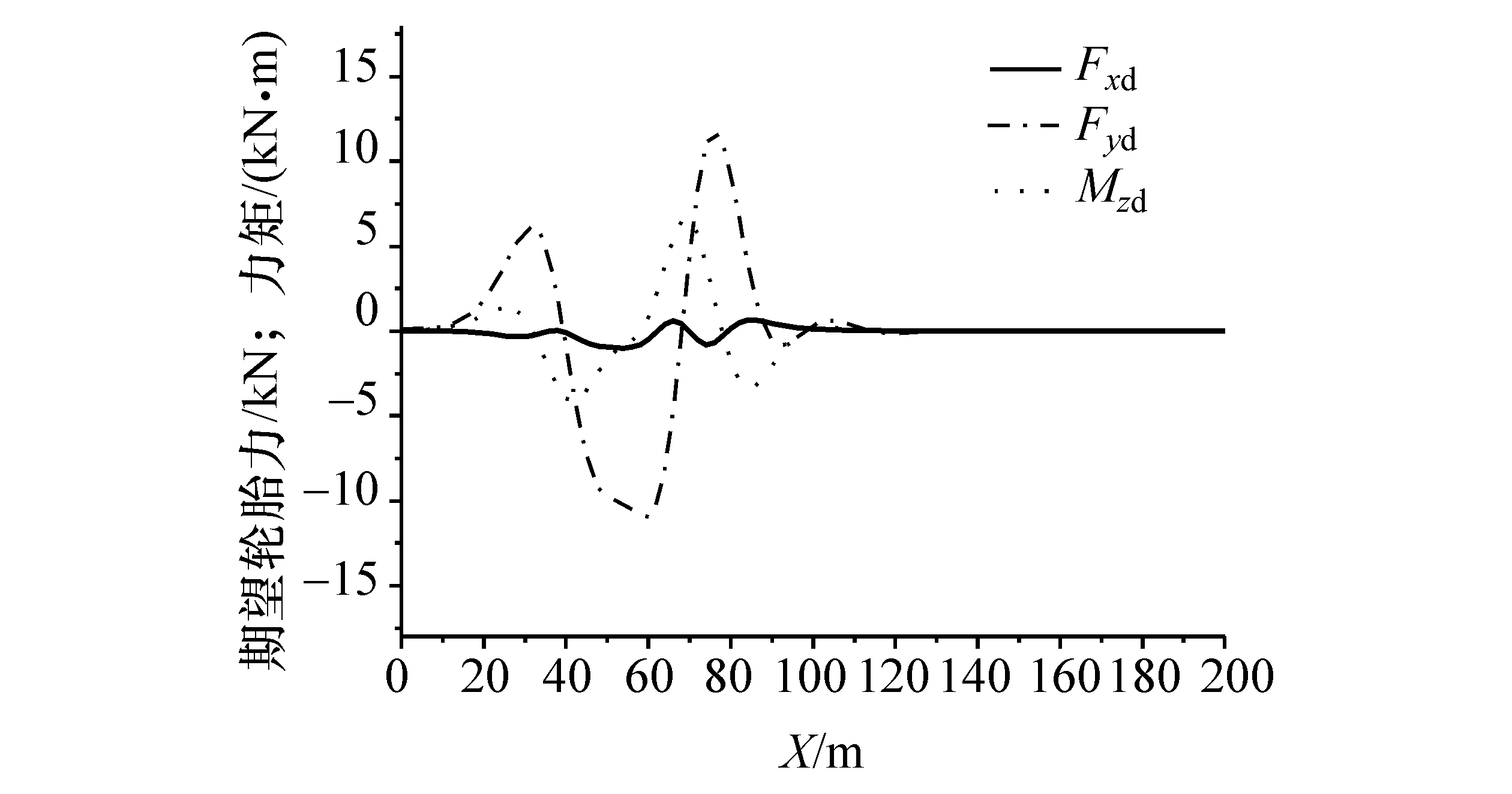
图5
前轮转角"
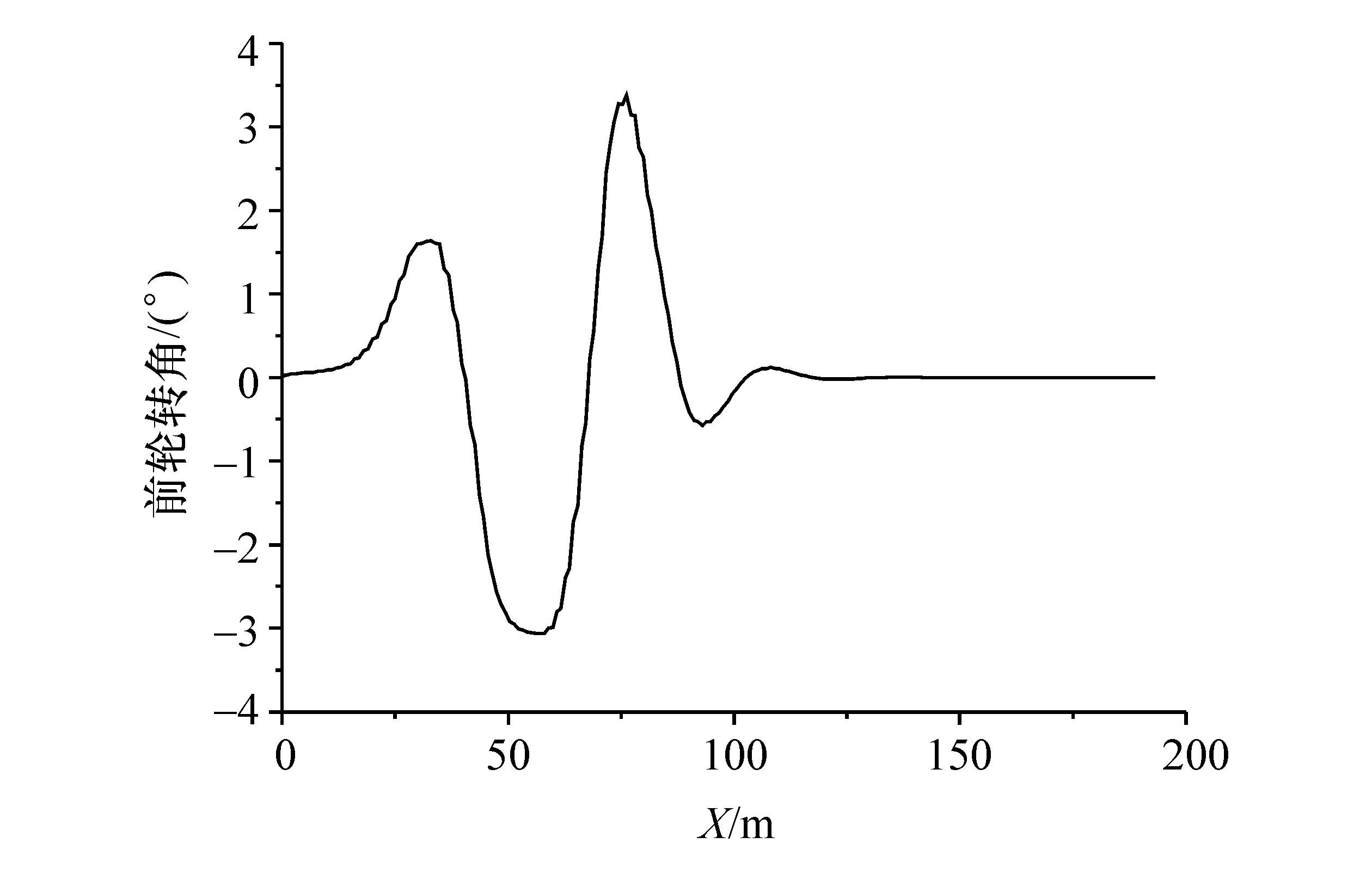
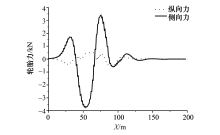
图6
左前轮轮胎力分配"
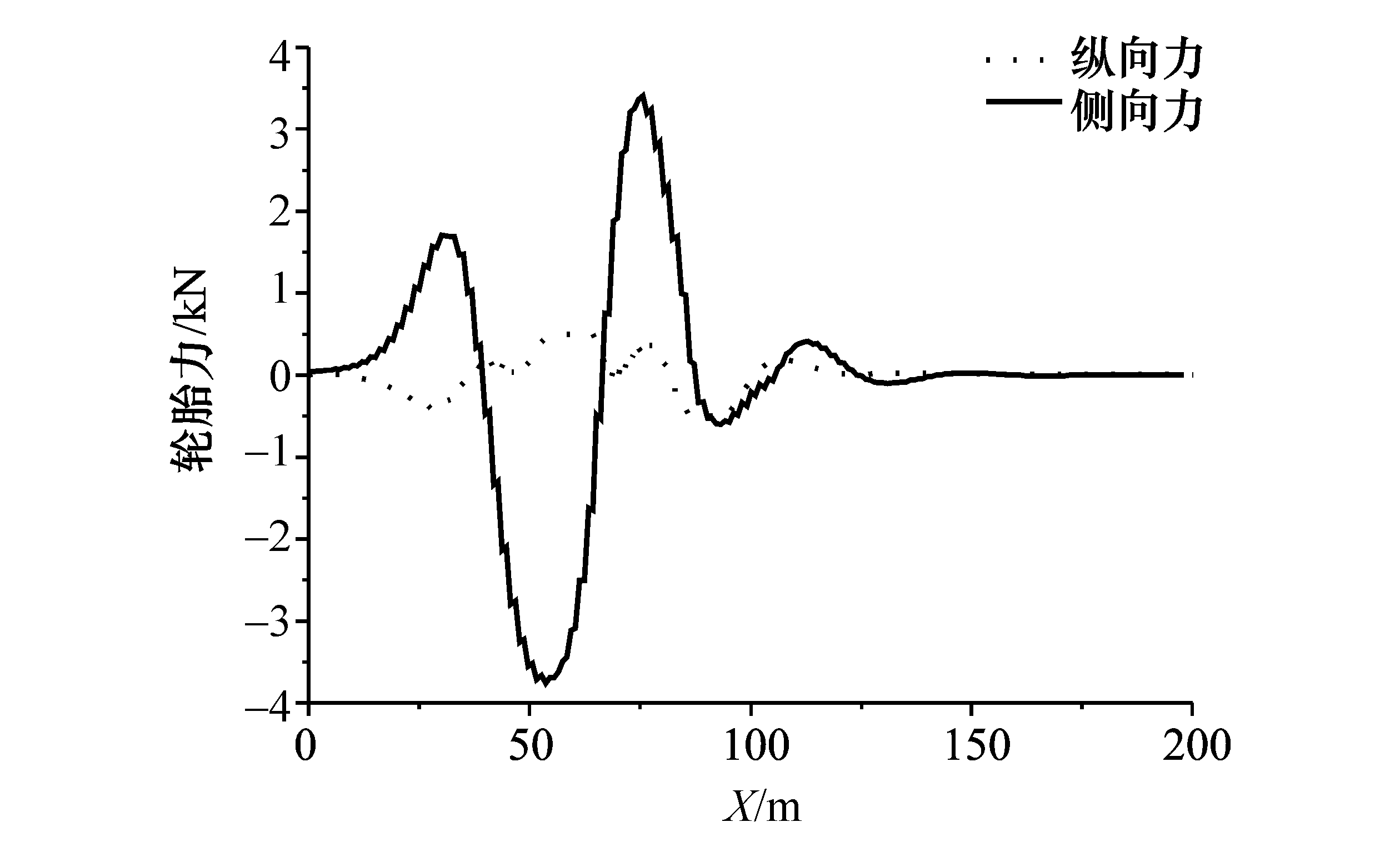

图7
右前轮轮胎力分配"
图8
左后轮轮胎力分配"
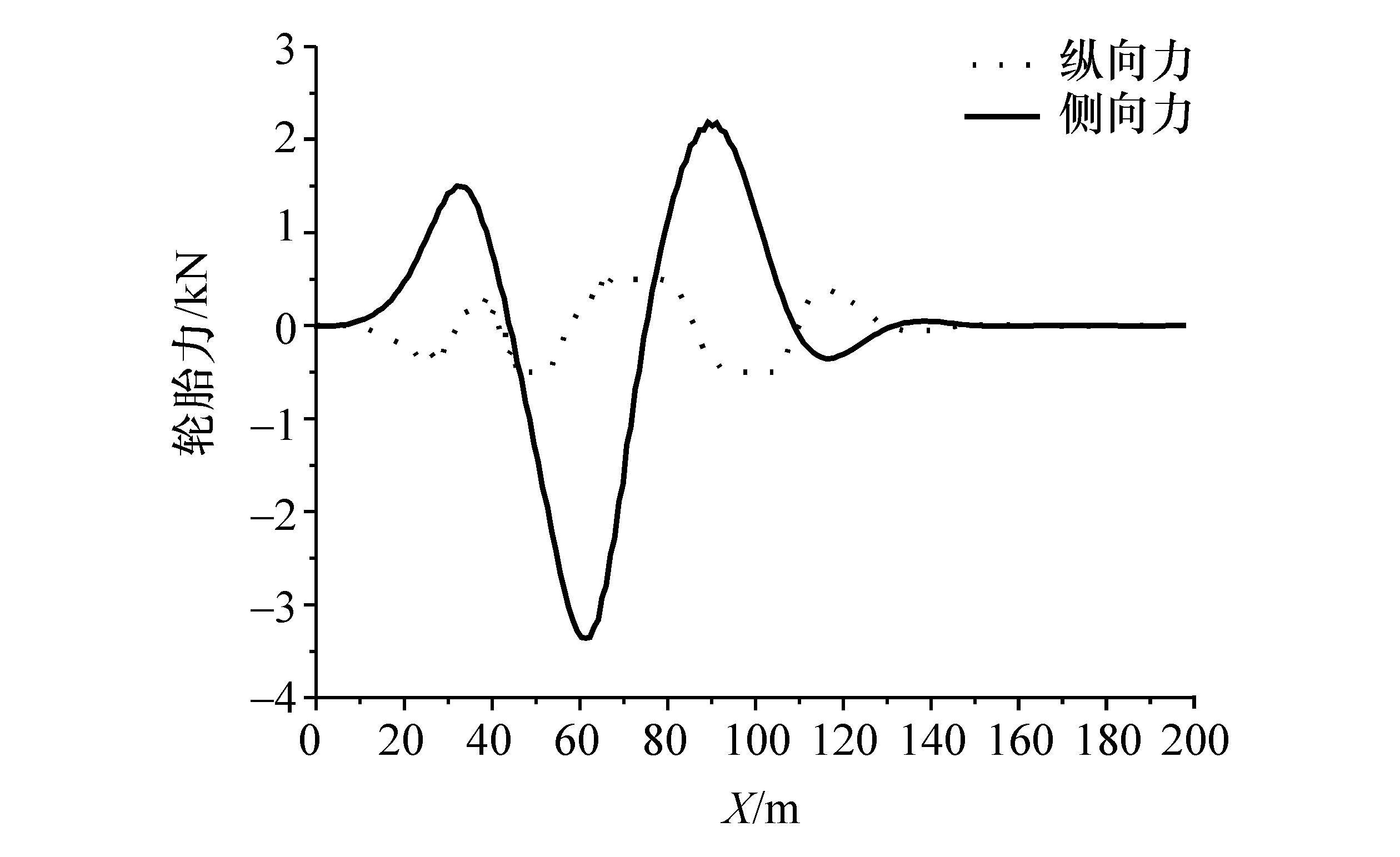
图9
右后轮轮胎力分配"
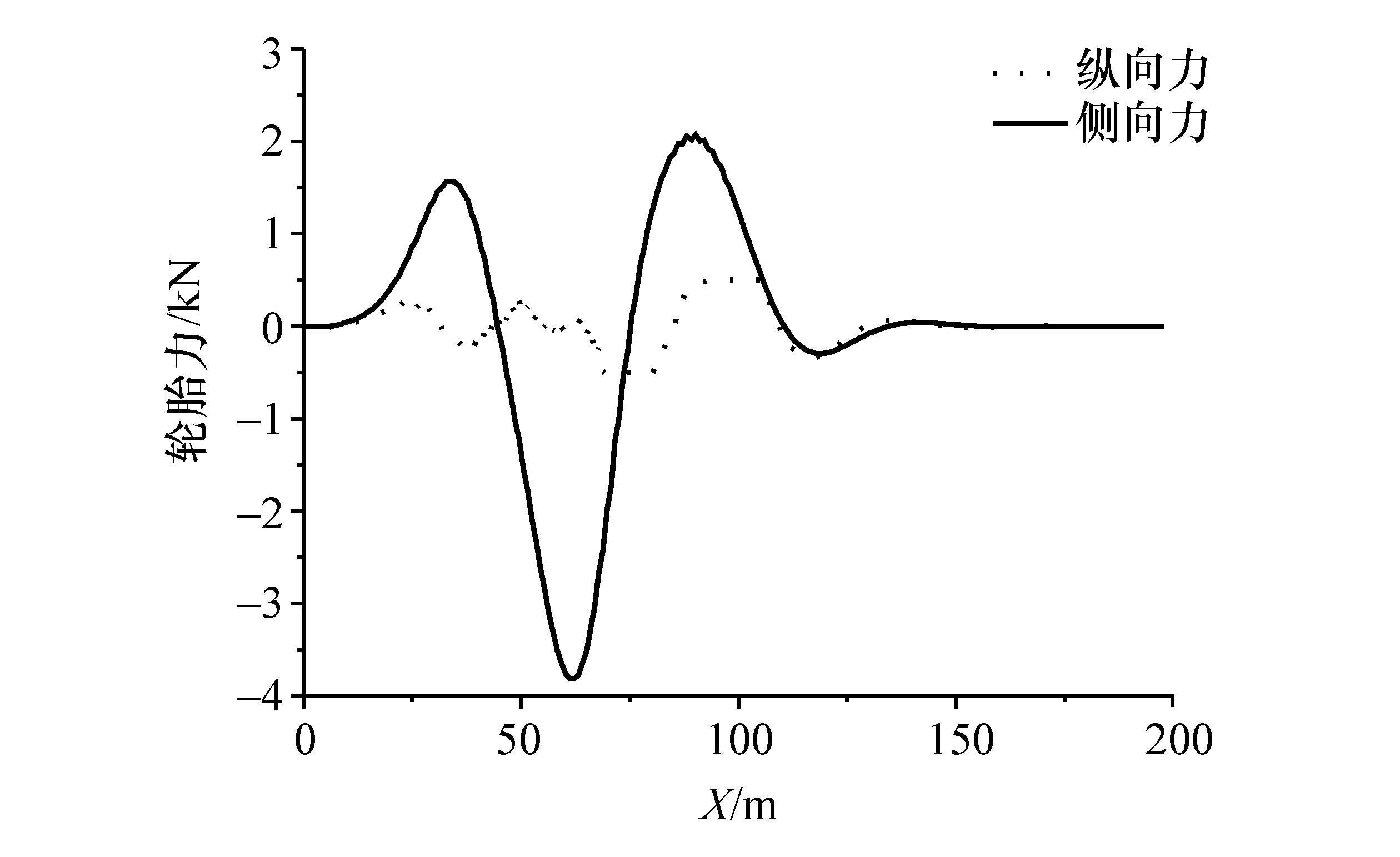
图10
左前轮驱动力矩"
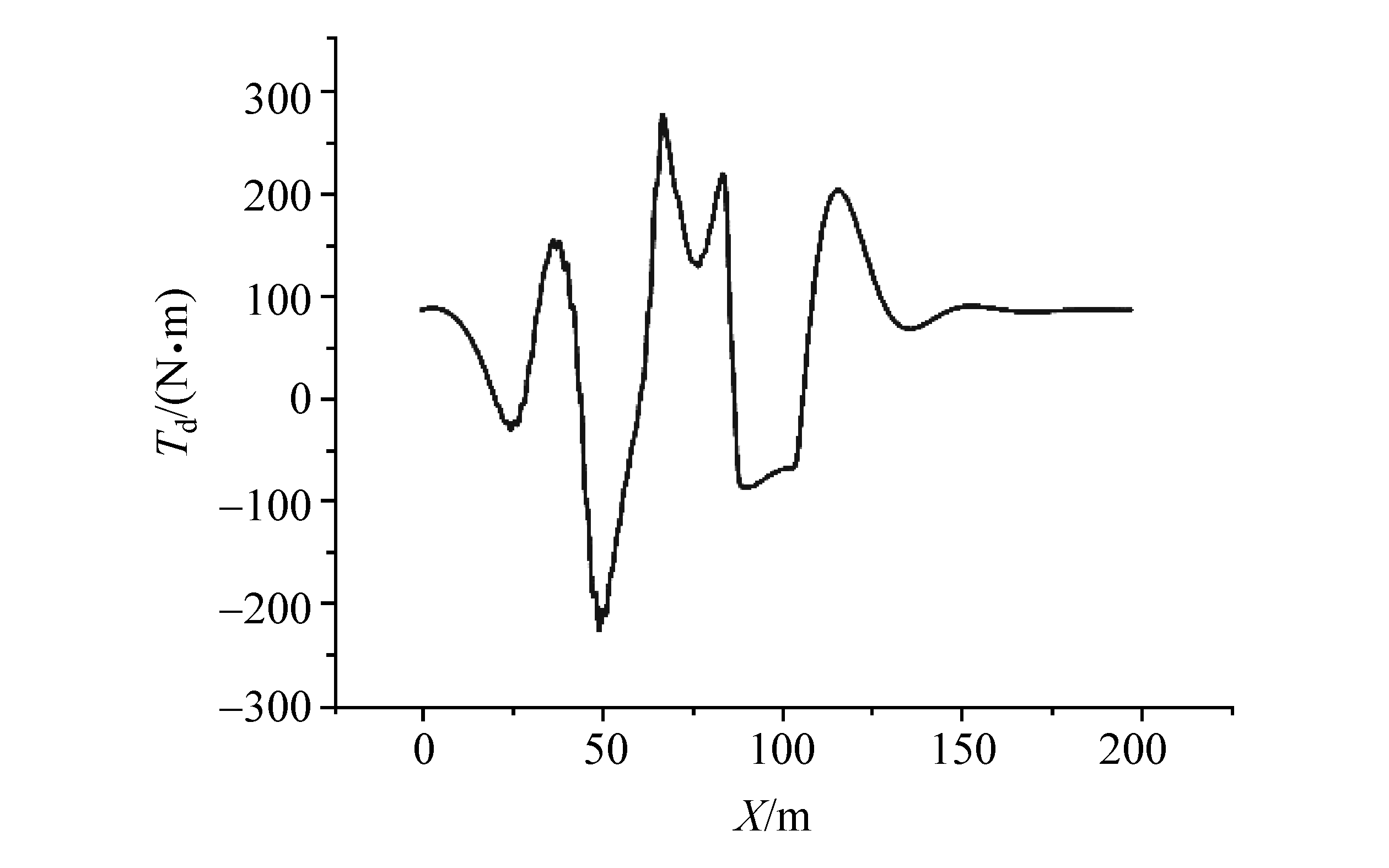
图11
右前轮驱动力矩"

图12
左后轮驱动力矩"
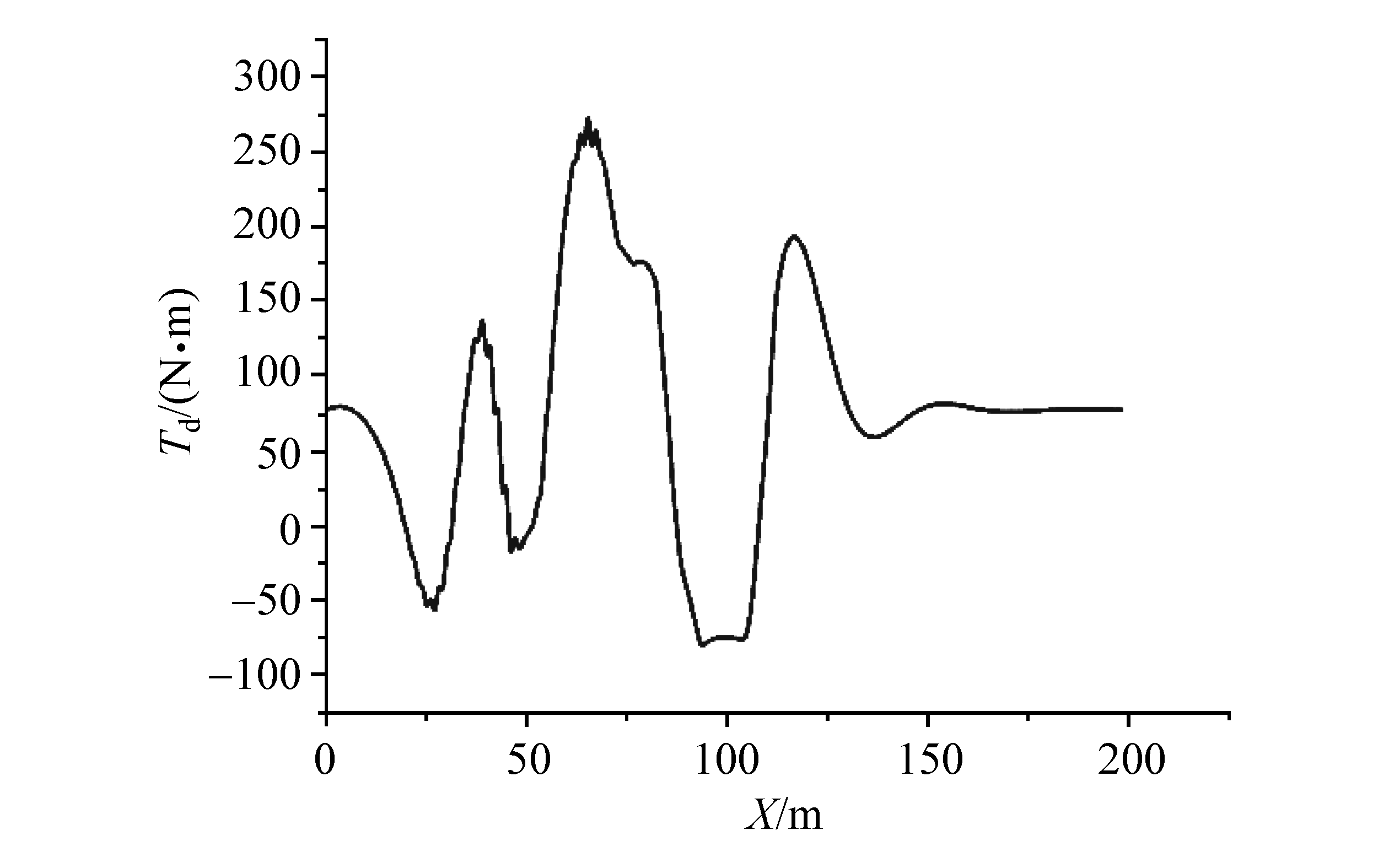
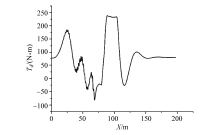
图13
右后轮驱动力矩"
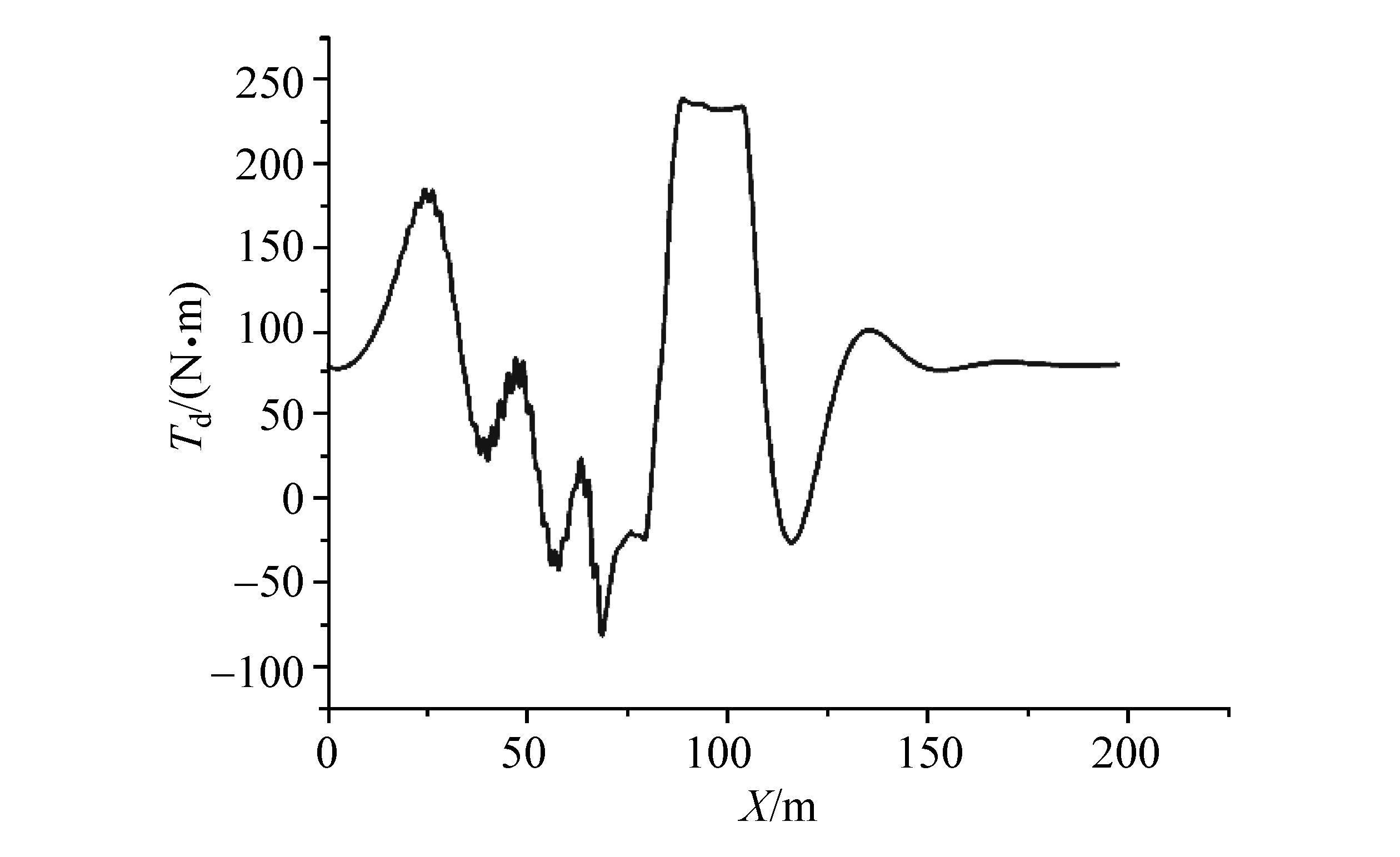
图14
横向位置"
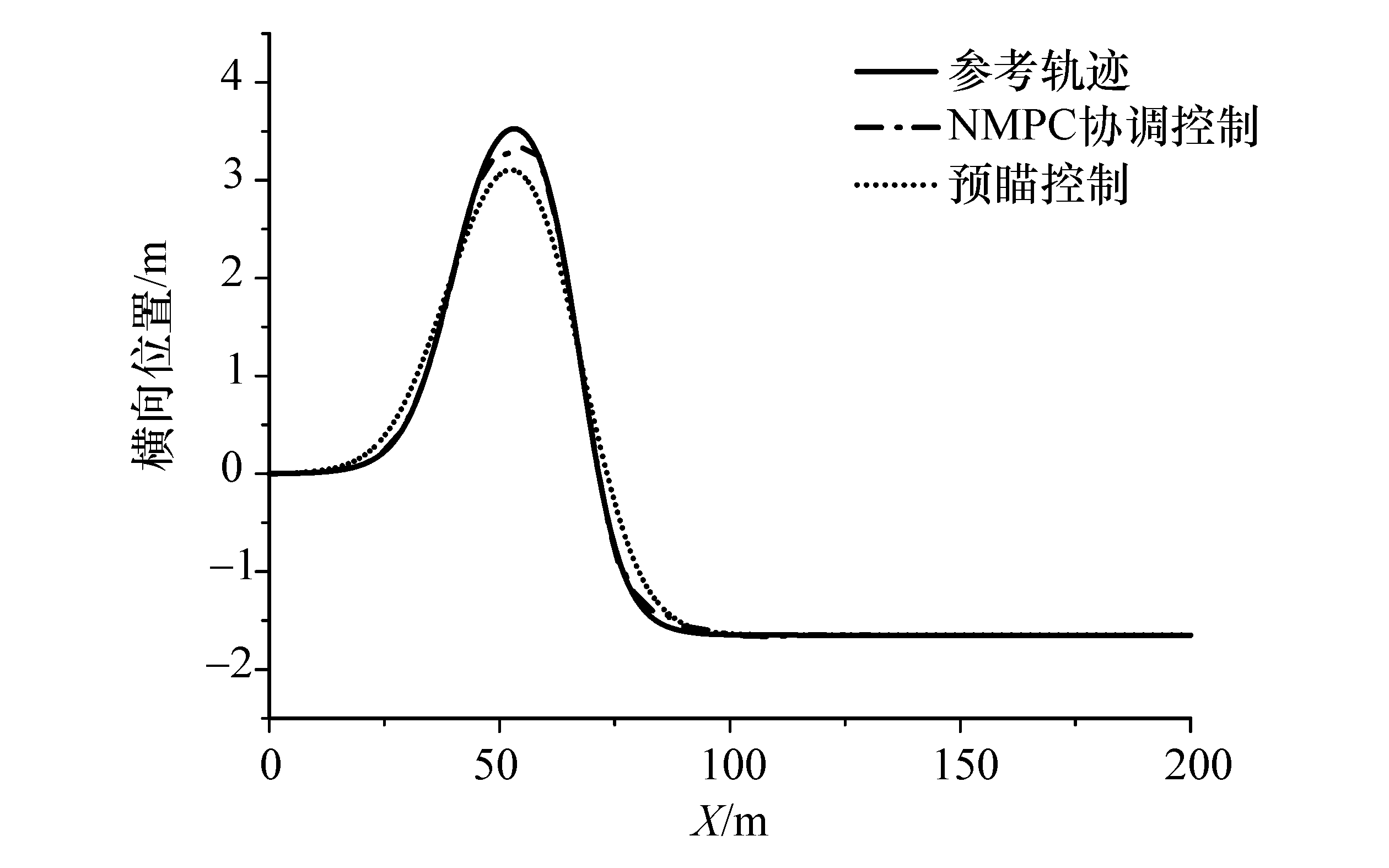
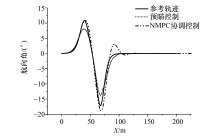
图15
航向角"
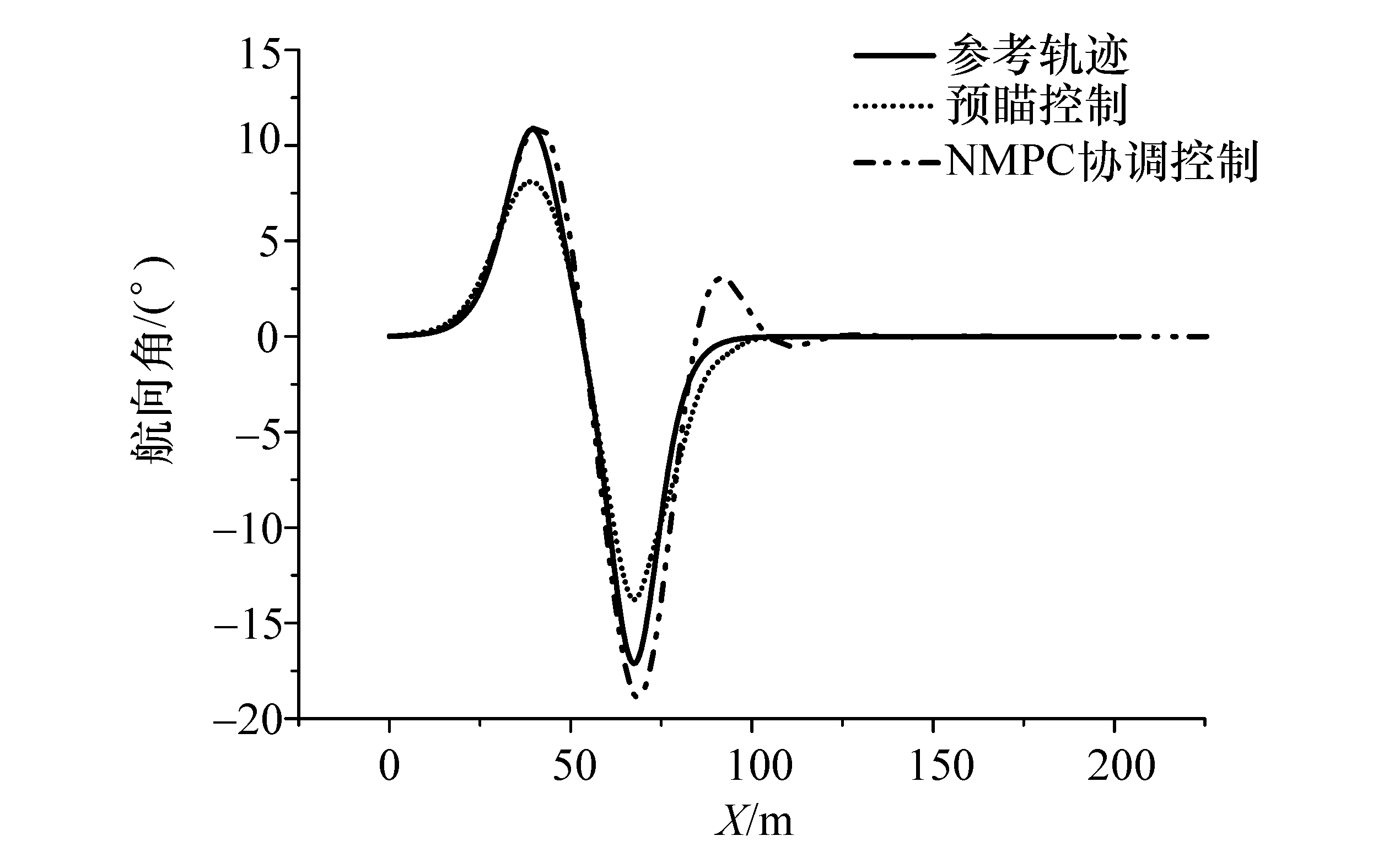
图16
横摆角速度"
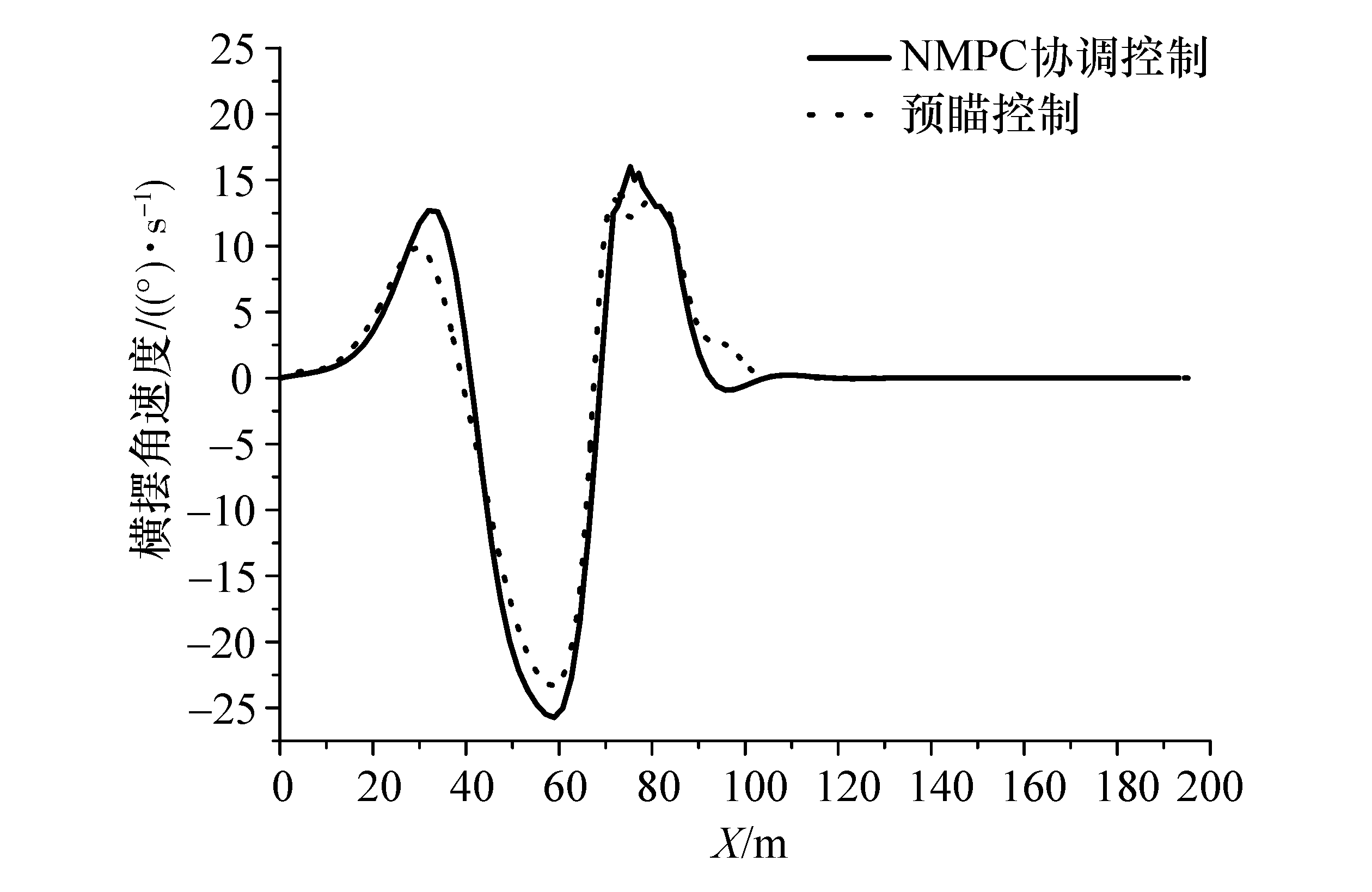
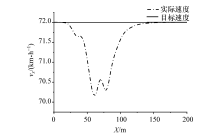
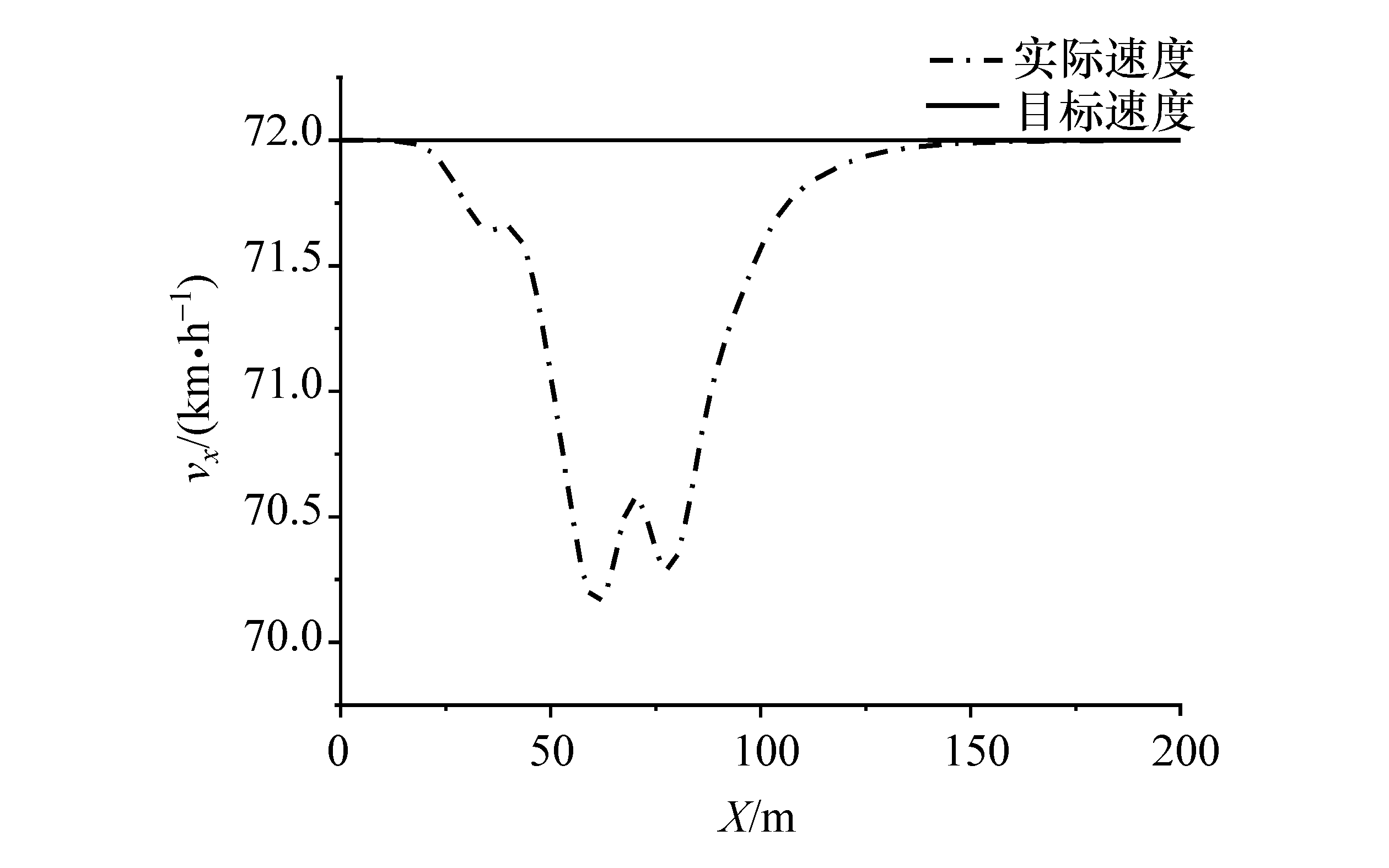
图17
纵向速度"
| 1 | 黄岩,吴军,刘春明. 自主车辆发展概况及关键技术[J]. 兵工自动化,2010,29(11):8-13,26. |
| HUANG Yan, WU Jun, LIU Chunming, et al. Overview and key technologies of autonomous vehicles[J]. Ordnance Industry Automation, 2010,29(11):8-13,26. | |
| 2 | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2):151-159. |
| GUO Jinghua, LI Keqiang, LUO Yugong. Review on the research of motion control for intelligent vehicles[J]. Journal of Automotive Safety and Engergy, 2016,7(2):151-159. | |
| 3 | HU C, WANG R R, YAN F J. Output constraint control on path following of four⁃wheel independently actuated autonomous ground vehicles [J]. IEEE Transactions on Vehicular Technology, 2016, 65(6):4033-4043. |
| 4 | KAYACAN E, RAMON H, SAEYS W. Robust trajectory tracking error model-based predictive control for unmanned ground vehicles [J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(2):806-814. |
| 5 | 王家恩, 陈无畏, 王檀彬,等. 基于期望横摆角速度的视觉导航智能车辆横向控制[J]. 机械工程学报, 2012, 48(4):108-115. |
| WANG Jiaen, CHEN Wuwei, WANG Tanbin, et al. Vision guided intelligent vehicle lateral control based on desired yaw rate[J]. Journal of Mechanical Engineering, 2012,48(4):108-115. | |
| 6 | 陈涛, 陈东. 基于神经网络滑模的智能车辆横向控制[J]. 传感器与微系统, 2017, 36(5):63-37. |
| CHEN Tao, CHEN Dong. Lateral control of intelligent vehicle based on neural networks sliding mode[J]. Transducer and Microsystem Technologies,2017,36(5):63-37. | |
| 7 | SURYANARAYANNAN S. Fault torlerant control and its application to lane-keeping control of automated vehicles[D]. California: University of California at Berkeley, 2002:55-60. |
| 8 | TAGNE G, TALJ R, CHARARA A. Design and comparison of robust nonlinear controllers for the lateral dynamics of intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(3): 796-809. |
| 9 | HAYAKAWA Y,WHITE R,KIMURA T, et al. Driver-compatible steering system for wide speed-range path following[J]. IEEE/ASME. Transactions on Mechatronics, 2004, 9(3):544-552. |
| 10 | 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2013:30-32. |
| HAN Jingqing. Active distuibance rejection control technique-the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2013:30-32. | |
| 11 | 王凯, 刘彦琳, 李印祥. 基于模型预测的横摆和侧向稳定性控制[J]. 北京汽车, 2018(4): 13-16. |
| 12 | FRANCESCO B, PAOLO F. MPC-based approach to active steering for autonomous vehicle systems[J]. International Journal on Vehicle Autonomous Systems, 2005, 3(2-4): 265-291. |
| 13 | PAOLO F, FRANCESCO B, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE. Transaction on Control Systems Technology, 2007,15(3):566-580. |
| 14 | CHEN T , XU X , CHEN L , et al. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles[J]. Mechanical Systems and Signal Processing, 2018, 101:377-388. |
| 15 | CHEN T , XU X , LI Y , et al. Speed-dependent coordinated control of differential and assisted steering for in-wheel motor driven electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2017:095440701772818. |
| 16 | 徐兴, 陈特, 陈龙, 等. 基于改进闭环子空间辨识的电动轮汽车纵向力估计[J]. 江苏大学学报(自然科学版), 2016, 37(6):650-656. |
| XU Xing, CHEN Te, CHEN Long, et al. Longitudinal force estimation for motorized wheels driving electric vehicle based on improved closed-loop subspace identification[J]. Journal of Jiangsu University(Natural Science Edition),2016, 37(6):650-656. | |
| 17 | GUO Jinghua, LUO Yugong, LI Keqiang, et al. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation[J]. Mechanical Systems & Signal Processing, 2018,105:183-199. |
| 18 | 陈特, 陈龙, 徐兴, 等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019,41(10):1109-1116. |
| CHEN Te, CHEN Long, XU Xing, et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019,41(10):1109-1116. | |
| 19 | SONG P, ZONG C, TOMIZUKA M. Combined longitudinal and lateral control for automated lane guidance of full drive-by-wire vehicles[C]. SAE Paper 2015-01-0321. |
| 20 | ZHOU H , JIA F , JING H , et al. Coordinated longitudinal and lateral motion control for four wheel independent motor-drive electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2018:1. |
| 21 | 徐兴, 卢山峰, 陈龙, 等. 基于差动和自主转向协调的分布式驱动无人车轨迹跟踪[J]. 汽车工程, 2018, 40(4):104-110. |
| XU Xing, LU Shanfeng, CHEN Long, et al. Trajectory tracking of distributed-drive self-driving vehicle based on coordination between autonomous steering and differential steering[J]. Automotive Engineering, 2018,40(4):104-110. | |
| 22 | 龚建伟,姜岩,徐威. 无人驾驶车辆模型预测控制[M]. 北京:北京理工大学出版社,2014:45-59. |
| GONG Jianwei, JIANG Yan, XU Wei. Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Techno⁃logy Press, 2014:45-59. | |
| 23 | HATTORI Y , ONO E , HOSOE S. Optimum vehicle trajectory control for obstacle avoidance problem[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(5):507-512. |
| 24 | LI Changgang, HU Junjie, YANG Yaping. 4WD+4WS VSC system modeling based on burckhardt tire model[J]. Journal of Zhejiang Wanli University, 2012(3):73-81. |
| 25 | RAJESH R. Vehicle dynamics and control[M]. 2nd ed. Springer, 2012:19-21. |
| 26 | BOYD S , VANDENBERGHE.Convex optimization[M]. New York: Cambridge University Press, 2004. |
| [1] | 郝建平,苏炎召,钟志华,黄晋. 面向智能汽车的SOA架构及服务调度机制研究[J]. 汽车工程, 2023, 45(9): 1563-1572. |
| [2] | 赵高士,陈龙,蔡英凤,廉玉波,王海,刘擎超,滕成龙. 融合复杂网络和记忆增强网络的轨迹预测技术[J]. 汽车工程, 2023, 45(9): 1608-1616. |
| [3] | 胡启慧,蔡英凤,王海,陈龙,董钊志,刘擎超. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| [4] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [5] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [6] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [7] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [8] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [9] | 李琴,汤建明,张博远,陈勇,王勇. 分布式驱动电动汽车多执行器容错控制研究[J]. 汽车工程, 2023, 45(12): 2251-2259. |
| [10] | 刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091. |
| [11] | 赵树廉,来飞,李克强,陈涛,孟璋劼,唐逸超,吴思宇,田浩东. 基于数字孪生技术的智能汽车测试方法研究[J]. 汽车工程, 2023, 45(1): 42-51. |
| [12] | 邵文博,李骏,张玉新,王红. 智能汽车预期功能安全保障关键技术[J]. 汽车工程, 2022, 44(9): 1289-1304. |
| [13] | 汪梓豪,蔡英凤,王海,陈龙,熊晓夏. 基于单目视觉运动估计的周边多目标轨迹预测方法[J]. 汽车工程, 2022, 44(9): 1318-1326. |
| [14] | 梁旺,秦兆博,陈亮,边有钢,胡满江. 基于改进BP神经网络的智能车纵向控制方法[J]. 汽车工程, 2022, 44(8): 1162-1172. |
| [15] | 李道飞,查安飞,徐彪,张家杰. 半挂汽车列车紧急避撞轨迹跟踪控制算法[J]. 汽车工程, 2022, 44(7): 1098-1106. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 1341
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 879
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
|