汽车工程 ›› 2023, Vol. 45 ›› Issue (11): 2082-2091.doi: 10.19562/j.chinasae.qcgc.2023.11.009
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
刘正发1,吴亚1,刘佩根1,顾荣琦2,陈广1( )
)
收稿日期:2023-09-07
修回日期:2023-10-22
出版日期:2023-11-25
发布日期:2023-11-27
通讯作者:
陈广
E-mail:guangchen@tongji.edu.cn
基金资助:
Zhengfa Liu1,Ya Wu1,Peigen Liu1,Rongqi Gu2,Guang Chen1()
Received:2023-09-07
Revised:2023-10-22
Online:2023-11-25
Published:2023-11-27
Contact:
Guang Chen
E-mail:guangchen@tongji.edu.cn
摘要:
现有的跨域自适应目标检测器主要通过特征分布匹配学习域不变特征来减小域偏移。然而,它们忽略了现实世界中因目标检测对象组合不同和类不平衡等引起的标签分布偏移问题,导致这些方法泛化性较差。为解决这一问题,本文提出一种基于特征和标签联合分布匹配的域自适应目标检测算法,以同时在特征和标签级别上显式对齐域分布。首先,提出一个图像级分类嵌入模块,通过对比学习增强全局特征可迁移性和可判别性。然后,提出类级分布对齐模块,通过多级特征对齐实现域间多模态结构对齐。最后,提出增强一致性正则化模块,通过区域一致性正则化实现跨域标签分布对齐。在多个数据集上的实验表明,所提出的域对齐算法能有效地促进跨域数据迁移前后语义一致性,为智能汽车跨视觉域应用提供了一种有效的解决方案。
刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091.
Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels[J]. Automotive Engineering, 2023, 45(11): 2082-2091.

图1
智能驾驶不同数据集比较[4]"

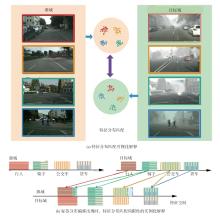
图2
特征分布匹配存在的问题"


图3
FLDMN框架概览"


图4
基于CycleGAN生成的变换图像对示例"

表1
不同天气下域自适应性能结果比较"
| 方法 | person | rider | car | truck | bus | train | motor | bicycle | mAP/ % |
|---|---|---|---|---|---|---|---|---|---|
| Source[ | 24.1 | 33.1 | 34.3 | 4.1 | 22.3 | 3.0 | 15.3 | 26.5 | 20.3 |
| DA-Faster[ | 25.0 | 31.0 | 40.5 | 22.1 | 35.3 | 20.2 | 20.0 | 27.1 | 27.6 |
| SCDA[ | 33.5 | 38.0 | 48.5 | 26.5 | 39.0 | 23.3 | 28.0 | 33.6 | 33.8 |
| MAF[ | 28.2 | 39.5 | 43.9 | 23.8 | 39.9 | 33.3 | 29.2 | 33.9 | 34.0 |
| SWDA[ | 29.9 | 42.3 | 43.5 | 24.5 | 36.2 | 32.6 | 30.0 | 35.3 | 34.3 |
| ICR-CCR[ | 32.9 | 43.8 | 49.2 | 27.2 | 45.1 | 36.4 | 30.3 | 34.6 | 37.4 |
| HTCN[ | 33.2 | 47.5 | 47.9 | 31.6 | 47.4 | 40.9 | 32.3 | 37.1 | |
| RPN-PR[ | 33.3 | 45.6 | 50.5 | 43.6 | 42.0 | 29.7 | 36.8 | 39.0 | |
| AFAN[ | 42.5 | 44.6 | 57.0 | 26.4 | 28.3 | 33.2 | 37.1 | 39.6 | |
| SLNO[ | 33.4 | 44.1 | 49.3 | 24.9 | 42.3 | 29.3 | 30.1 | 37.1 | 36.3 |
| SC-UDA[ | 43.7 | 27.1 | 43.8 | 29.7 | 31.2 | 38.7 | |||
| DDF[ | 37.2 | 51.9 | 24.7 | 43.9 | 34.2 | 40.8 | 39.1 | ||
| FLDMN | 33.4 | 45.4 | 50.9 | 29.9 | 55.4 | 33.4 | 36.5 | 40.4 |
表2
从合成图像到真实图像域自适应性能结果比较"
| 方法 | AP on Car/ % |
|---|---|
| Source[ | 34.6 |
| DA-Faster[ | 39.0 |
| MAF[ | 41.1 |
| SWDA[ | 40.1 |
| HTCN[ | 42.5 |
| SLNO[ | |
| FLDMN | 43.0 |
表3
不相似域间跨域自适应性能结果比较"
| 方法 | aero | bird | botl | car | chai | tabl | hrs | prsn | shep | train | bike |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Source[ | 35.6 | 24.3 | 20.0 | 32.8 | 30.6 | 13.8 | 36.8 | 48.7 | 16.5 | 22.9 | 52.5 |
| DA-Faster[ | 15.0 | 12.4 | 19.8 | 23.2 | 22.1 | 10.6 | 19.6 | 34.6 | 1.0 | 19.7 | 34.6 |
| SWDA[ | 26.2 | 32.6 | 38.5 | 37.1 | 34.8 | 17.0 | 33.8 | 61.6 | 9.3 | 54.1 | 48.5 |
| ICR-CCR[ | 28.7 | 31.8 | 40.1 | 36.6 | 38.7 | 17.6 | 33.3 | 61.3 | 22.3 | 49.1 | 55.3 |
| HTCN[ | 33.6 | 34.0 | 45.6 | 39.8 | 39.7 | 21.1 | 63.0 | 19.3 | 50.2 | 58.9 | |
| DC[ | 47.1 | 38.8 | 46.6 | 52.6 | 39.1 | 34.9 | 67.8 | 44.9 | 53.2 | ||
| HCDN[ | 35.0 | 33.6 | 41.7 | 45.2 | 22.3 | 38.0 | 27.0 | 52.1 | |||
| CROD[ | 31.4 | 44.3 | 42.5 | 50.2 | 22.0 | 36.5 | 58.9 | 8.3 | 62.4 | ||
| FLDMN | 39.4 | 35.6 | 34.6 | 40.0 | 64.9 | 21.6 | 65.4 | 65.6 | |||
| 方法 | boat | bus | cat | cow | dog | mbike | plnt | sofa | tv | mAP/ % | |
| Source[ | 23.0 | 43.9 | 10.7 | 11.7 | 6.0 | 45.9 | 41.9 | 7.3 | 32.0 | 27.8 | |
| DA-Faster[ | 11.9 | 21.1 | 3.1 | 26.3 | 10.0 | 39.4 | 29.3 | 17.1 | 24.8 | 19.8 | |
| SWDA[ | 33.7 | 54.3 | 18.6 | 58.3 | 12.5 | 65.5 | 24.9 | 49.1 | 38.1 | ||
| ICR-CCR[ | 26.0 | 63.6 | 9.4 | 49.3 | 14.1 | 74.3 | 46.3 | 24.3 | 44.3 | 38.3 | |
| HTCN[ | 23.4 | 57.0 | 12.0 | 51.3 | 20.1 | 72.8 | 43.1 | 30.1 | 51.8 | 40.3 | |
| DC[ | 45.8 | 14.5 | 48.4 | 23.7 | 54.0 | 23.8 | 51.0 | 43.2 | |||
| HCDN[ | 30.6 | 12.7 | 55.6 | 20.6 | 86.8 | 50.0 | 47.9 | ||||
| CROD[ | 30.5 | 61.4 | 21.1 | 20.3 | 47.7 | 46.7 | 33.7 | 58.4 | 41.8 | ||
| FLDMN | 38.6 | 71.4 | 61.2 | 89.9 | 46.6 | 29.3 | 46.3 |
表4
FLDMN在Cityscapes→Foggy-Cityscapes域自适应任务上的消融实验分析"
| 方法 | person | rider | car | truck | bus | train | mcyc | bicy | mAP/% |
|---|---|---|---|---|---|---|---|---|---|
| Source[ | 24.1 | 33.1 | 34.3 | 4.1 | 22.3 | 3.0 | 15.3 | 26.5 | 20.3 |
| ICR-CCR[ | 29.7 | 37.3 | 43.6 | 20.8 | 37.3 | 12.8 | 25.7 | 31.7 | 29.9 |
| Variant1 | 33.0 | 50.9 | 45.1 | 31.2 | 35.6 | 36.2 | 38.1 | ||
| Variant2 | 44.1 | 51.1 | 28.6 | 38.6 | 37.2 | ||||
| FLDMN | 33.4 | 45.4 | 29.9 | 55.4 | 33.4 | 40.4 |
表5
FLDMN在Pascal VOC→Clipart1k域自适应任务上的消融实验分析"
| 方法 | aero | bird | botl | car | chai | tabl | hrs | prsn | shep | train | bike |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Source[ | 35.6 | 24.3 | 20.0 | 32.8 | 30.6 | 13.8 | 48.7 | 16.5 | 22.9 | 52.5 | |
| DA-Faster[ | 15.0 | 12.4 | 19.8 | 23.2 | 22.1 | 10.6 | 19.6 | 34.6 | 1.0 | 19.7 | 34.6 |
| FLDMN-F | 39.0 | 37.7 | 35.6 | 63.8 | 26.0 | ||||||
| FLDMN | 39.4 | 44.2 | 46.8 | 34.6 | 40.0 | 64.9 | 65.4 | 65.6 | |||
| 方法 | boat | bus | cat | cow | dog | bike | plnt | sofa | tv | mAP/% | |
| Source[ | 23.0 | 43.9 | 10.7 | 11.7 | 6.0 | 45.9 | 41.9 | 7.3 | 32.0 | 27.8 | |
| DA-Faster[ | 11.9 | 21.1 | 3.1 | 26.3 | 10.0 | 39.4 | 29.3 | 17.1 | 24.8 | 19.8 | |
| FLDMN-F | 51.0 | 31.8 | |||||||||
| FLDMN | 38.6 | 71.4 | 15.9 | 61.2 | 21.8 | 89.9 | 56.1 | 46.3 |

图5
FLDMN-F和FLDMN目标检测结果分析"

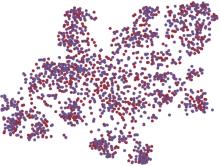
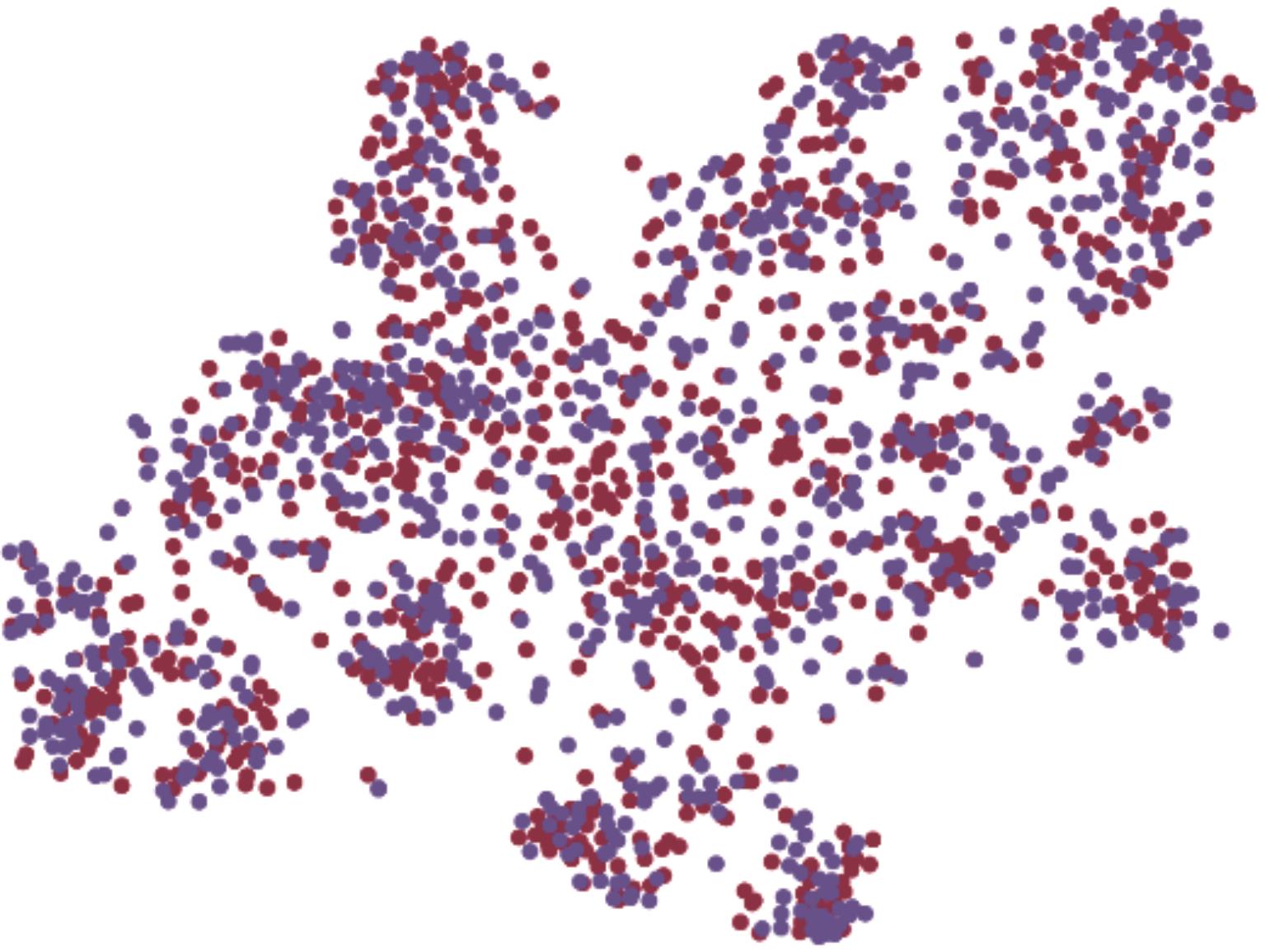
图6
Pascal VOC→Clipart1k域自适应任务上的图像级域不变特征可视化"
| 1 | 陈文强, 熊辉, 李克强, 等. 基于深度神经网络的行人及骑车人联合检测[J]. 汽车工程, 2018, 40(6): 726-733. |
| CHEN W Q, XIONG L, LI K Q, et al. Joint detection of pedestrians and cyclists based on deep neural network[J]. Automotive Engineering, 2018, 40(6): 726-733. | |
| 2 | 冯润泽, 江昆, 于伟光, 等. 基于两阶段分类算法的中国交通标志牌识别[J]. 汽车工程, 2023,44(3):434-441. |
| FENG R Z, JIANG K, YU W G, et al. Chinese traffic sign recognition based on two-stage classification algorithm[J]. Automotive Engineering, 2023,44(3):434-441. | |
| 3 | 谢德胜, 徐友春, 陆峰, 等. 基于多传感器信息融合的3维目标实时检测[J]. 汽车工程, 2022, 44(3): 11. |
| XIE D S, XU Y C, LU F, et al. Real-time detection of 3D targets based on multi-sensor information fusion[J]. Automotive Engineering, 2022, 44(3): 11. | |
| 4 | CHEN Y, LI W, SAKARIDIS C, et al. Domain adaptive faster R-CNN for object detection in the wild[C]. Proceedings of the IEEE conference on computer vision and pattern recognition, 2018: 3339-3348. |
| 5 | 王大方, 杜京东, 曹江, 等. 面向自动驾驶数据生成的风格迁移网络研究[J]. 汽车工程, 2022, 44(5): 684-690. |
| WANG D F, DU J D, CAO J, et al. Research on style transfer network for autonomous driving data generation[J]. Automotive Engineering, 2022, 44(5): 684-690. | |
| 6 | 胡杰, 徐博远, 熊宗权, 等. 基于多尺度掩码分类域自适应网络的跨域目标检测算法[J]. 汽车工程, 2022, 44(9): 1327-1338. |
| HU J, XU B Y, XIONG Z Q, et al. Cross-domain target detection algorithm based on multi-scale mask classification domain adaptive network[J]. Automotive Engineering, 2022, 44(9): 1327-1338. | |
| 7 | LI B, WANG Y, CHE T, et al. Rethinking distributional matching based domain adaptation[J]. arXiv preprint arXiv:, 2020. |
| 8 | CAO Y, LONG M, WANG J. Unsupervised domain adaptation with distribution matching machines[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2018, 32(1). |
| 9 | CAI T, GAO R, LEE J, et al. A theory of label propagation for subpopulation shift[C]. International Conference on Machine Learning. PMLR, 2021: 1170-1182. |
| 10 | LIU X, GUO Z, LI S, et al. Adversarial unsupervised domain adaptation with conditional and label shift: infer, align and iterate[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 10367-10376. |
| 11 | KUMAR A, RAGHUNATHAN A, JONES R, et al. Fine-tuning can distort pretrained features and underperform out-of-distribution[J]. arXiv preprint arXiv:, 2022. |
| 12 | WU Y, WINSTON E, KAUSHIK D, et al. Domain adaptation with asymmetrically-relaxed distribution alignment[C]. International Conference on Machine Learning. PMLR, 2019: 6872-6881. |
| 13 | TACHET DES COMBES R, ZHAO H, WANG Y X, et al. Domain adaptation with conditional distribution matching and generalized label shift[J]. Advances in Neural Information Processing Systems, 2020, 33: 19276-19289. |
| 14 | ZHU J Y, PARK T, ISOLA P, et al. Unpaired image-to-image translation using cycle-consistent adversarial networks[C]. Proceedings of the IEEE International Conference on Computer Vision, 2017: 2223-2232. |
| 15 | LIU F, ZHANG X, WAN F, et al. Domain contrast for domain adaptive object detection[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 32(12): 8227-8237. |
| 16 | DENG Z, KONG Q, AKIRA N, et al. Hierarchical contrastive adaptation for cross-domain object detection[J]. Machine Vision and Applications, 2022, 33(4): 62. |
| 17 | HUANG W, YI M, ZHAO X. Towards the generalization of contrastive self-supervised learning[J]. arXiv preprint arXiv:, 2021. |
| 18 | OORD A, LI Y, VINYALS O. Representation learning with contrastive predictive coding[J]. arXiv preprint arXiv:, 2018. |
| 19 | YANG G, XIA H, DING M, et al. Bi-directional generation for unsupervised domain adaptation[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(4): 6615-6622. |
| 20 | HSU H K, YAO C H, TSAI Y H, et al. Progressive domain adaptation for object detection[C]. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2020: 749-757. |
| 21 | GAO L, HU H M, LI M. A progressive domain adaptation for object detection via coarse-grained foreground guidance[C]. 2022 IEEE 24th International Workshop on Multimedia Signal Processing (MMSP). IEEE, 2022: 1-6. |
| 22 | PRABHU V, KHARE S, KARTIK D, et al. Sentry: selective entropy optimization via committee consistency for unsupervised domain adaptation[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 8558-8567. |
| 23 | CORDTS M, OMRAN M, RAMOS S, et al. The cityscapes dataset for semantic urban scene understanding[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 3213-3223. |
| 24 | SAKARIDIS C, DAI D, VAN GOOL L. Semantic foggy scene understanding with synthetic data[J]. International Journal of Computer Vision, 2018, 126(9): 973-992. |
| 25 | JOHNSON-ROBERSON M, BARTO C, MEHTA R, et al. Driving in the matrix: can virtual worlds replace human-generated annotations for real world tasks?[J]. arXiv preprint arXiv:, 2016. |
| 26 | EVERINGHAM M, VAN GOOL L, WILLIAMS C K I, et al. The pascal visual object classes (VOC) challenge[J]. International Journal of Computer Vision, 2010, 88(2): 303-338. |
| 27 | INOUE N, FURUTA R, YAMASAKI T, et al. Cross-domain weakly-supervised object detection through progressive domain adaptation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 5001-5009. |
| 28 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[J]. arXiv preprint arXiv:, 2014. |
| 29 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 30 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. Advances in Neural Information Processing Systems, 2015, 28. |
| 31 | ZHU X, PANG J, YANG C, et al. Adapting object detectors via selective cross-domain alignment[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 687-696. |
| 32 | HE Z, ZHANG L. Multi-adversarial faster-rcnn for unrestricted object detection[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 6668-6677. |
| 33 | SAITO K, USHIKU Y, HARADA T, et al. Strong-weak distribution alignment for adaptive object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 6956-6965. |
| 34 | XU C D, ZHAO X R, JIN X, et al. Exploring categorical regularization for domain adaptive object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11724-11733. |
| 35 | CHEN C, ZHENG Z, DING X, et al. Harmonizing transferability and discriminability for adapting object detectors[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 8869-8878. |
| 36 | ZHANG Y, WANG Z, MAO Y. RPN prototype alignment for domain adaptive object detector[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 12425-12434. |
| 37 | WANG H, LIAO S, SHAO L. AFAN: augmented feature alignment network for cross-domain object detection[J]. IEEE Transactions on Image Processing, 2021, 30: 4046-4056. |
| 38 | XU Q, LI Y, WANG G, et al. Skip-layer network with optimization method for domain adaptive detection[J]. Plos One, 2022, 17(3): e0263748. |
| 39 | YU F, WANG D, CHEN Y, et al. SC-UDA: style and content gaps aware unsupervised domain adaptation for object detection[C]. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2022: 382-391. |
| 40 | LIU D, ZHANG C, SONG Y, et al. Decompose to adapt: cross-domain object detection via feature disentanglement[J]. IEEE Transactions on Multimedia, 2022, 25: 1333-1344. |
| 41 | TIAN K, ZHANG C, WANG Y, et al. Multi-level consistency regularization for domain adaptive object detection[J]. Neural Computing and Applications, 2023: 1-16. |
| 42 | VAN DER MAATEN L, HINTON G. Visualizing data using t-SNE[J]. Journal of Machine Learning Research, 2008, 9(11). |
| [1] | 程腾,倪昊,张强,王文冲,石琴. 基于虚拟点云的二阶段多模态融合网络[J]. 汽车工程, 2024, 46(2): 222-229. |
| [2] | 马雷, 杨顺清, 王欢欢, 翟家琛, 徐健傲. 融合图像显著性特征的轻量级目标检测算法[J]. 汽车工程, 2024, 46(1): 84-91. |
| [3] | 秦洪懋,沈国利,周云水,黄圣杰,秦晓辉,谢国涛,丁荣军. 特征稀疏场景下基于标签的车辆视觉SLAM[J]. 汽车工程, 2023, 45(9): 1543-1552. |
| [4] | 郝建平,苏炎召,钟志华,黄晋. 面向智能汽车的SOA架构及服务调度机制研究[J]. 汽车工程, 2023, 45(9): 1563-1572. |
| [5] | 赵高士,陈龙,蔡英凤,廉玉波,王海,刘擎超,滕成龙. 融合复杂网络和记忆增强网络的轨迹预测技术[J]. 汽车工程, 2023, 45(9): 1608-1616. |
| [6] | 胡启慧,蔡英凤,王海,陈龙,董钊志,刘擎超. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| [7] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [8] | 韩勇,林旭洁,黄红武,蔡鸿瑜,罗金镕,李燕婷. 典型汽车碰撞事故场景中行人运动轨迹预测方法[J]. 汽车工程, 2023, 45(6): 1022-1030. |
| [9] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
| [10] | 郑燚,张世民,陆云龙. 基于AUTOSAR的域控制器以太网通信系统设计实现[J]. 汽车工程, 2023, 45(6): 965-973. |
| [11] | 陈妍妍,王海,蔡英凤,陈龙,李祎承. 基于检测的高效自动驾驶实例分割方法[J]. 汽车工程, 2023, 45(4): 541-550. |
| [12] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [13] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [14] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [15] | 胡杰,刘昊岩,张敏超,张志豪,朱琪,陈锐鹏,骆嫚. 基于有限状态机的代客泊车决策规划系统研究[J]. 汽车工程, 2023, 45(2): 243-252. |
|