汽车工程 ›› 2024, Vol. 46 ›› Issue (2): 222-229.doi: 10.19562/j.chinasae.qcgc.2024.02.004
程腾1,2,3( ),倪昊1,2,3,张强1,2,3,4,王文冲4,石琴1,2,3
),倪昊1,2,3,张强1,2,3,4,王文冲4,石琴1,2,3
Teng Cheng1,2,3(),Hao Ni1,2,3,Qiang Zhang1,2,3,4,Wenchong Wang4,Qin Shi1,2,3
摘要:
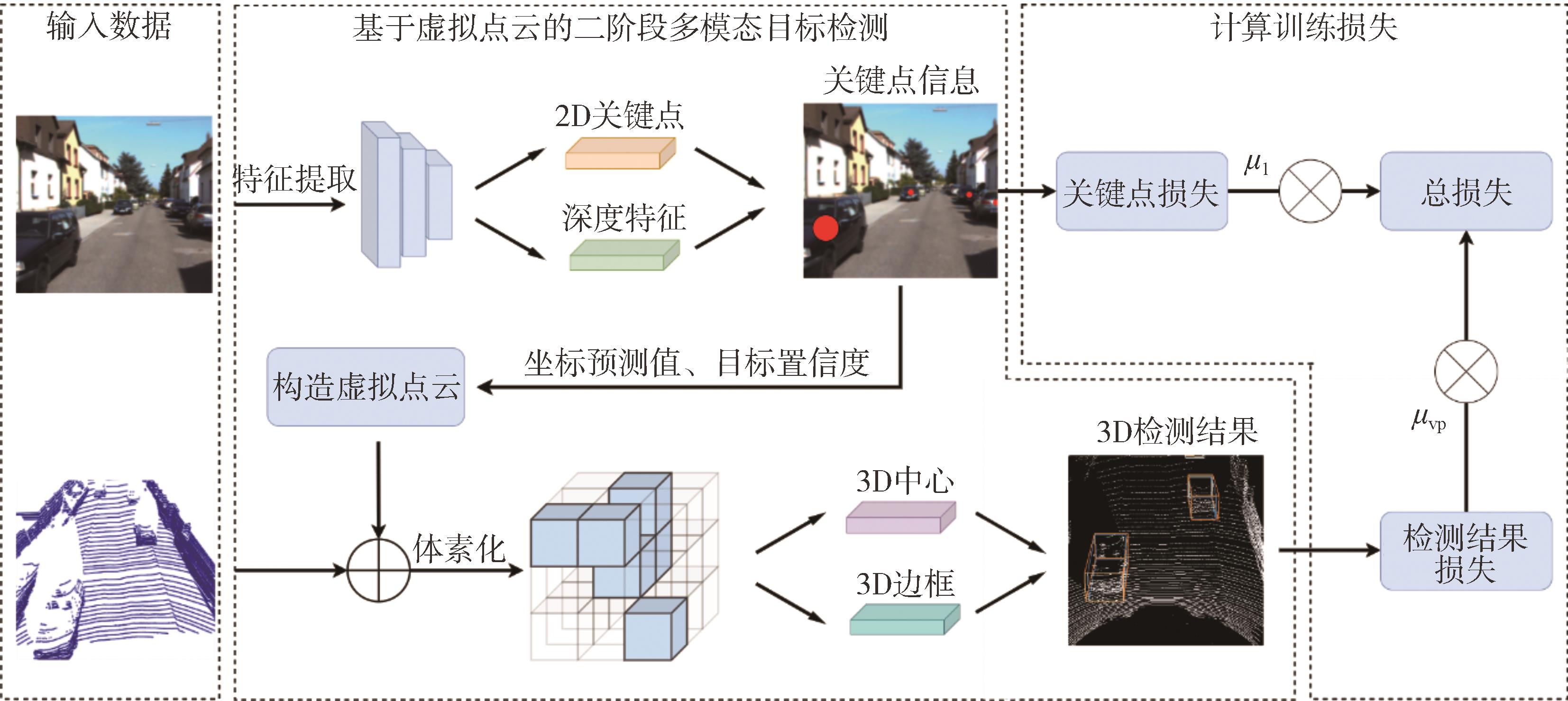
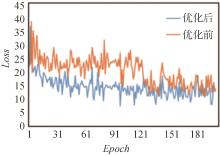
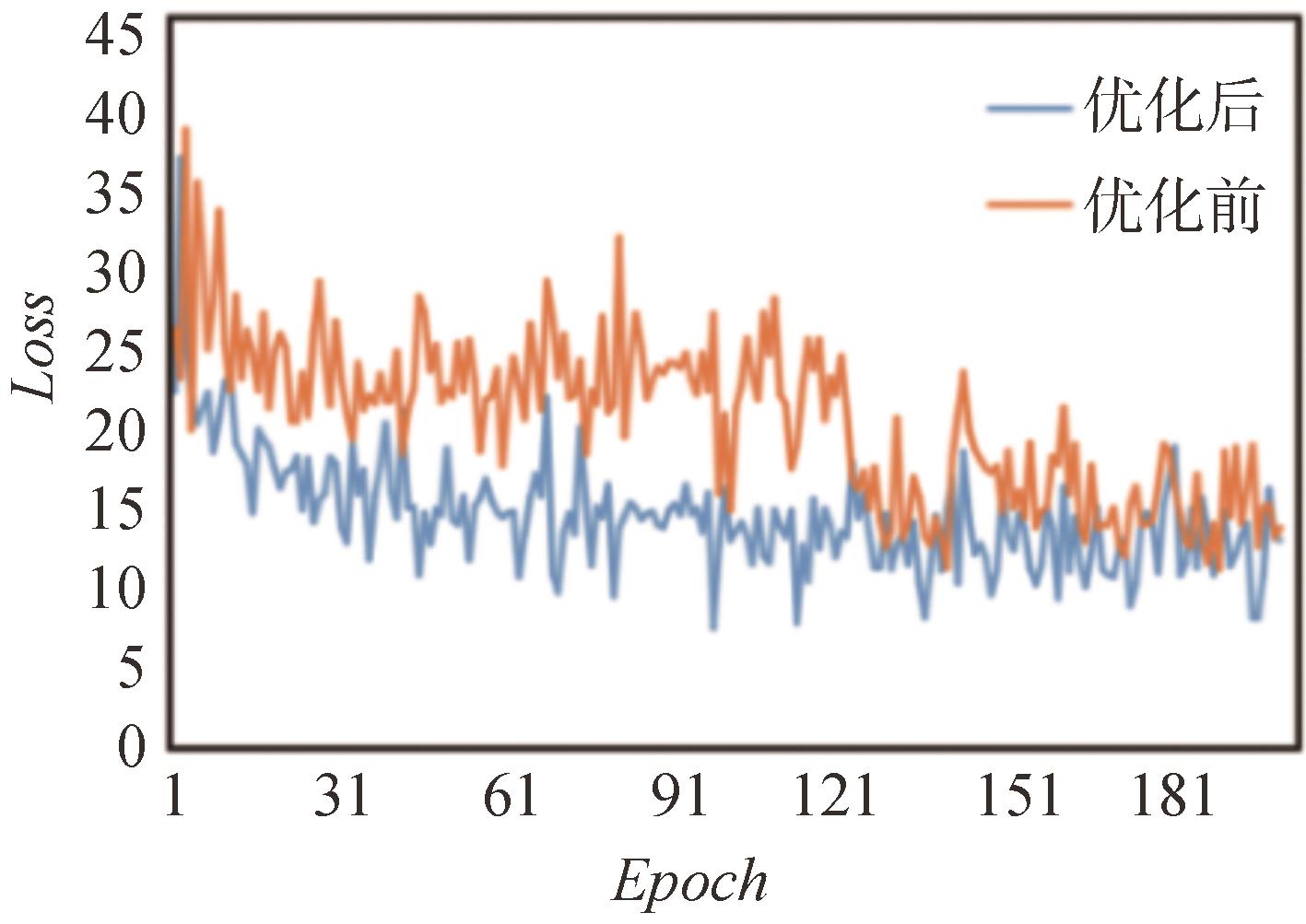
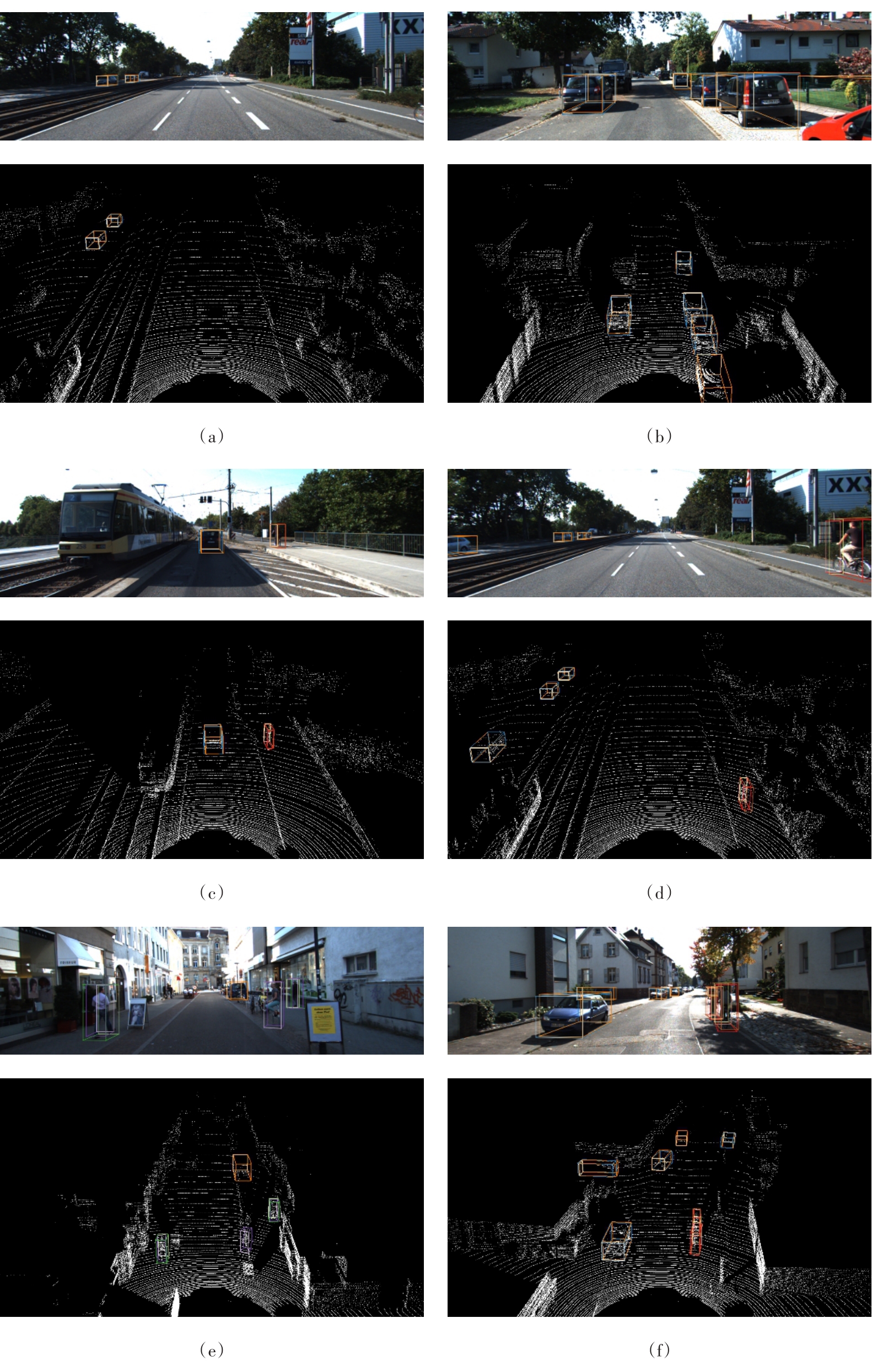
针对点云的稀疏性和无序性对目标检测准确率的影响,本文提出了一种基于虚拟点云的二阶段多模态融合网络VPC-VoxelNet。首先,利用图像检测目标信息构造虚拟点云,增加点云的密集程度,从而提高目标特征的表现;其次,增加点云特征维度以区分真实和虚拟点云,并使用含置信度编码的体素,增强点云的相关性;最后,采用虚拟点云的比例系数设计损失函数,增加图像检测有监督训练,提高二阶段网络训练效率,避免二阶段端到端网络模型存在的模型误差累计问题。该目标检测网络VPC-VoxelNet在KITTI数据集上进行了测试,检测精度优于经典三维点云检测网络和某些多传感器信息融合网络,车辆检测精度达到了86.9%。