汽车工程 ›› 2023, Vol. 45 ›› Issue (9): 1608-1616.doi: 10.19562/j.chinasae.qcgc.2023.09.009
所属专题: 智能网联汽车技术专题-规划&决策2023年
赵高士1,陈龙1,蔡英凤1( ),廉玉波3,王海2,刘擎超1,滕成龙1
),廉玉波3,王海2,刘擎超1,滕成龙1
Gaoshi Zhao1,Long Chen1,Yingfeng Cai1(),Yubo Lian3,Hai Wang2,Qingchao Liu1,Chenglong Teng1
摘要:
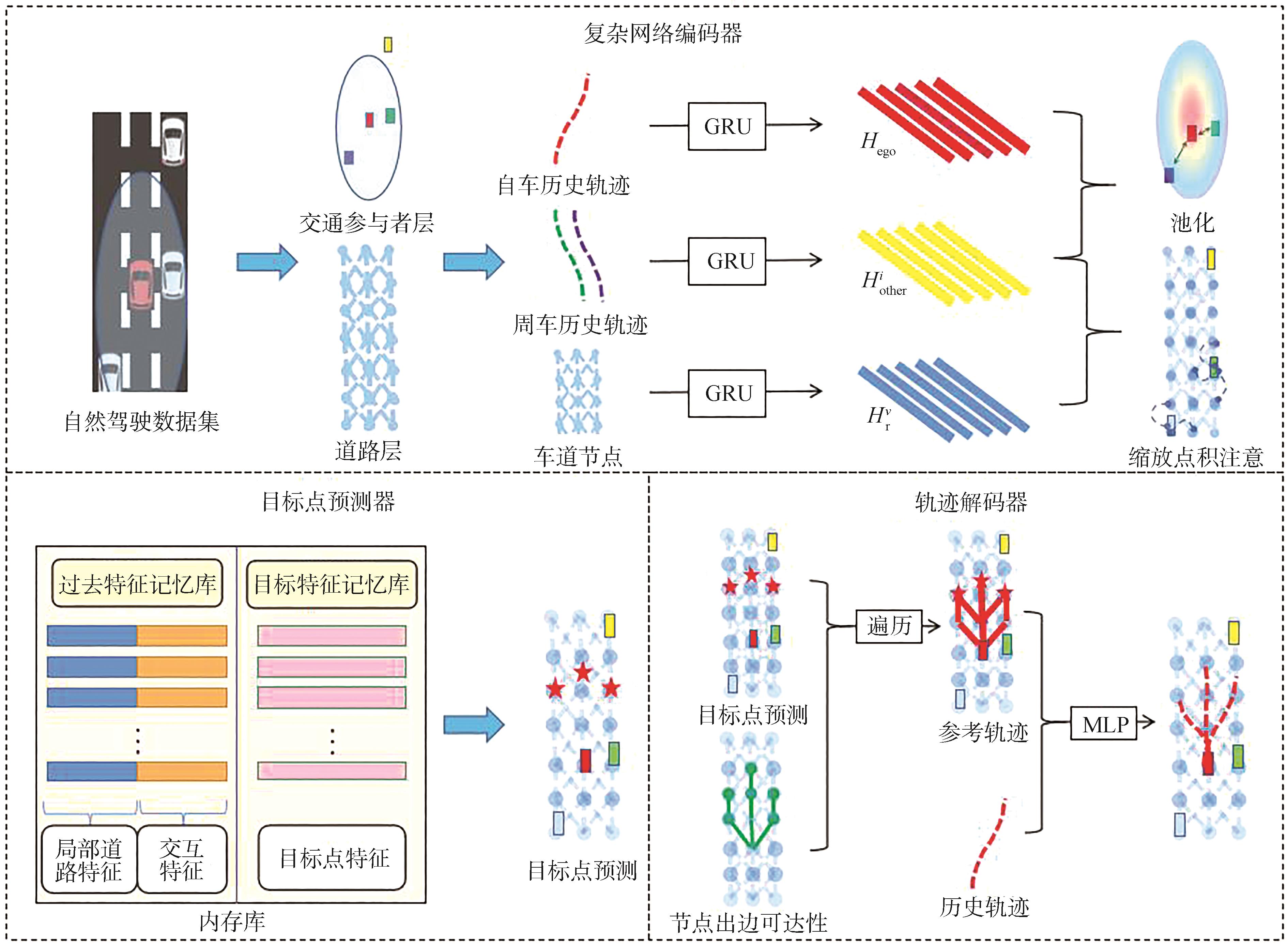
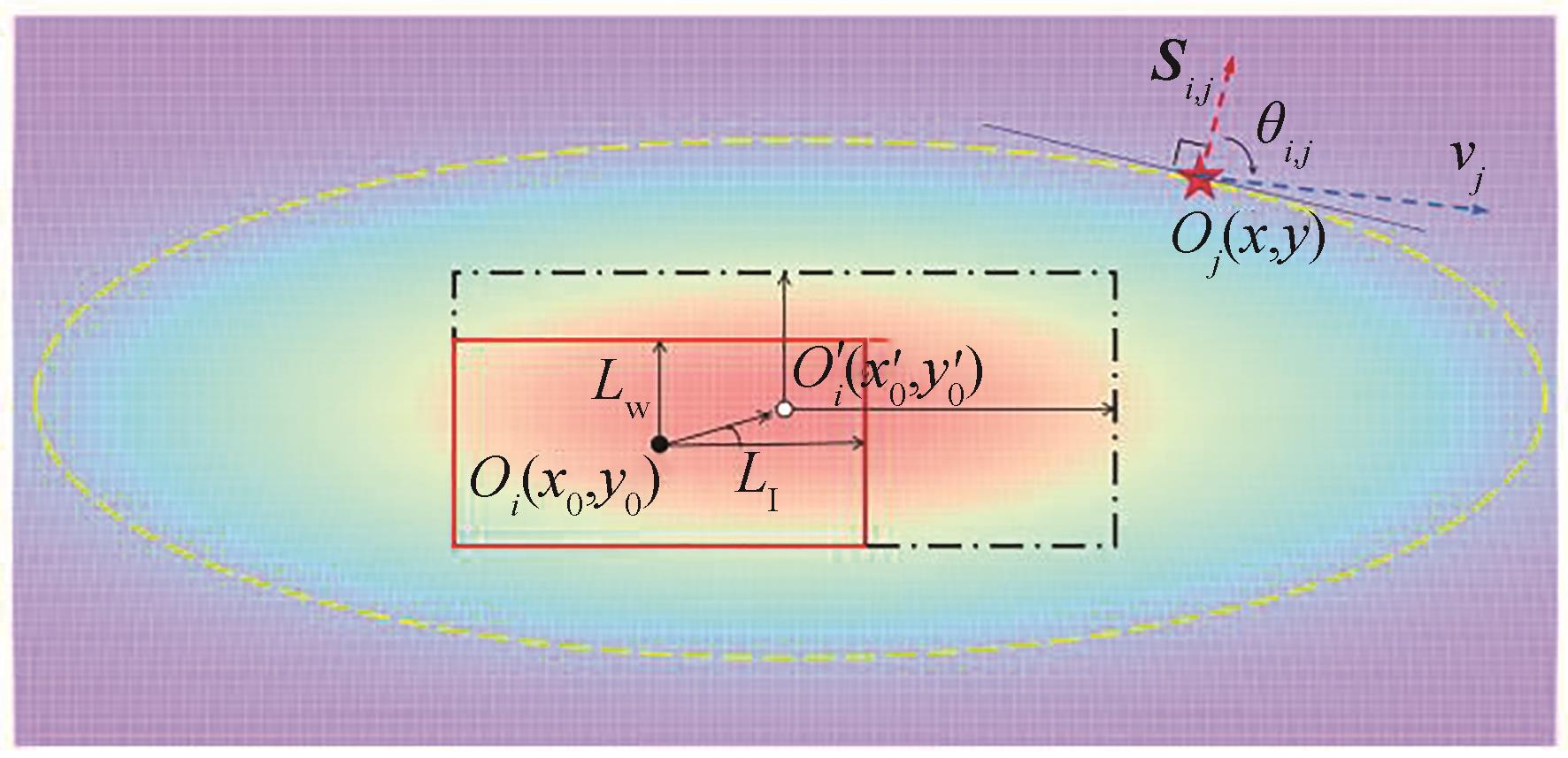
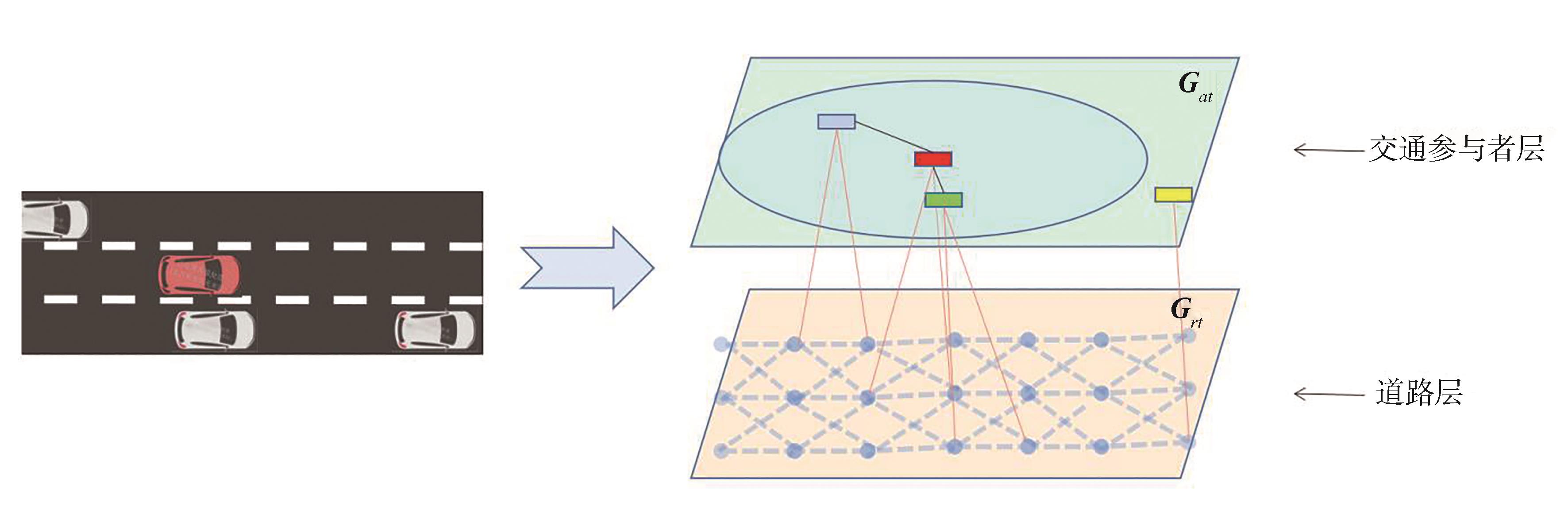
周边目标轨迹预测是智能汽车决策规划的重要依据,现有基于多交通主体欧氏距离的建模方法无法有效描述多目标之间的复杂交互关系,制约其在实际动态交通场景中的适用性。本文创新地将复杂网络和记忆增强神经网络进行融合,构建了双层动态复杂网络模型,实现了高可靠性和可解释性的多模态轨迹预测。该模型使用高斯可变安全场计算风险权重,考虑了交通参与者的行驶状态参数、形状尺寸和智能体与道路之间的相互影响,真实准确地反映复杂环境中多交通主体间的交互关系;构建了一种由注意力机制和包含风险权重的社交池组成的复杂网络编码模块,实现了动态复杂场景中交通参与者与道路约束之间作用特征的全面有效提取;构建了以参考轨迹为条件的轨迹解码模块,实现了兼顾精度和可解释性的多模态轨迹输出。在公开数据集nuScenes上的验证结果表明,本文所提出的方法最小平均位移误差为1.37 m,最小最终位移误差为8.13 m,性能优异且具有较好的可解释性。