汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1484-1493.doi: 10.19562/j.chinasae.qcgc.2022.10.002
所属专题: 智能网联汽车技术专题-规划&控制2022年
卢少波1,2( ),谢菲菲1,张博涵1,陆嘉峰1,李彩霞1
),谢菲菲1,张博涵1,陆嘉峰1,李彩霞1
收稿日期:2022-04-20
修回日期:2022-05-15
出版日期:2022-10-25
发布日期:2022-10-21
通讯作者:
卢少波
E-mail:lsb@cqu.edu.cn
基金资助:
Shaobo Lu1,2(),Feifei Xie1,Bohan Zhang1,Jiafeng Lu1,Caixia Li1
Received:2022-04-20
Revised:2022-05-15
Online:2022-10-25
Published:2022-10-21
Contact:
Shaobo Lu
E-mail:lsb@cqu.edu.cn
摘要:
为保证人机共驾车辆紧急避让行人时的行人安全和车辆稳定性,提出了一种基于行人非对称势场的人(驾驶员)车协同博弈避撞策略。首先充分考虑行人过街特性及其与车辆的相对运动,建立了一种非对称双椭圆行人势场,以更好地表征行人风险,并在此基础上进行了避撞路径规划。接着为提升避撞过程的车辆稳定性并同时保证轨迹跟踪性能,构建了基于非合作博弈的驾驶员-主动前轮转向(AFS)-主动后轮转向(ARS)三者协同控制器,并在行人避让工况下进行了仿真验证。结果表明:ARS参与后,在确保避撞轨迹跟踪性能的同时,稳定性明显提升,其横向速度误差绝对值均值比驾驶员-AFS两者协同控制器减小了46.43%。
卢少波,谢菲菲,张博涵,陆嘉峰,李彩霞. 基于非对称势场的人车协同博弈避撞[J]. 汽车工程, 2022, 44(10): 1484-1493.
Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields[J]. Automotive Engineering, 2022, 44(10): 1484-1493.

图1
行人避撞场景"
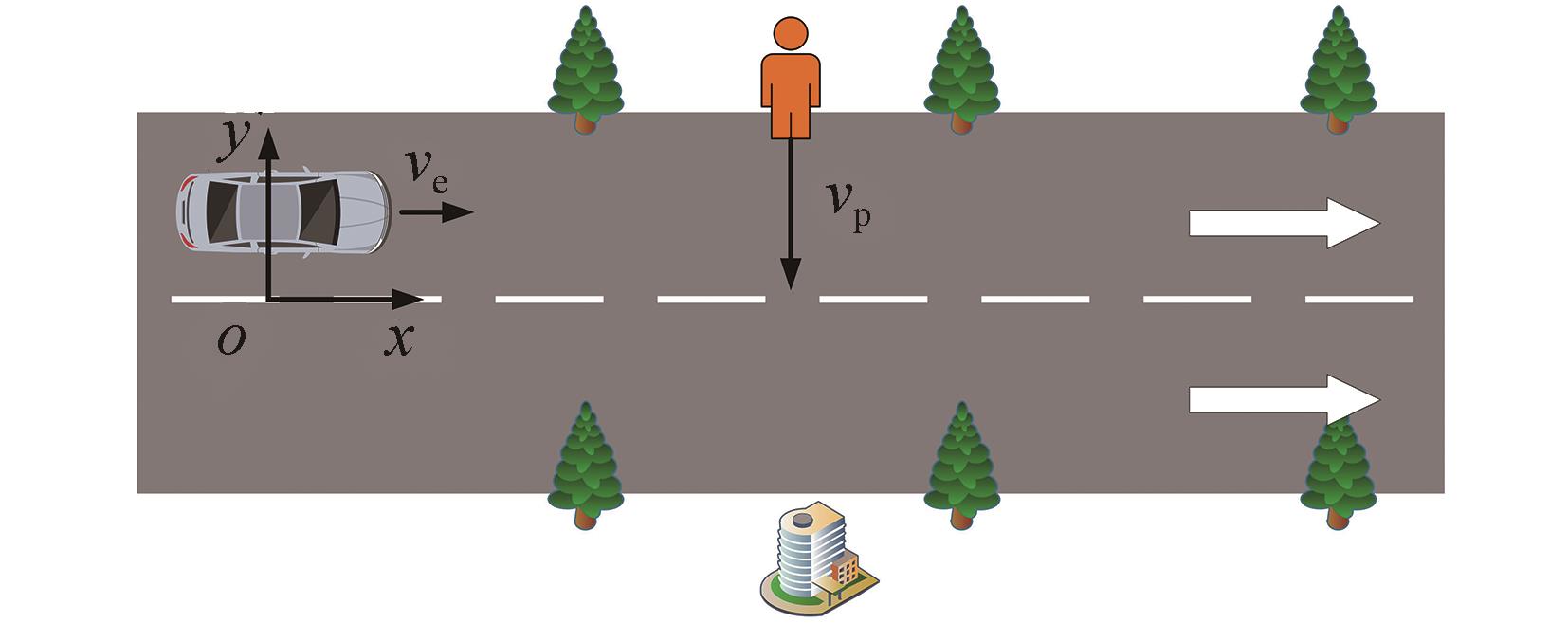
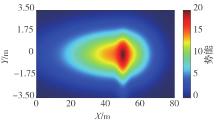
图2
非对称双椭圆行人势场"
图3
道路中心线与方向引力势场"
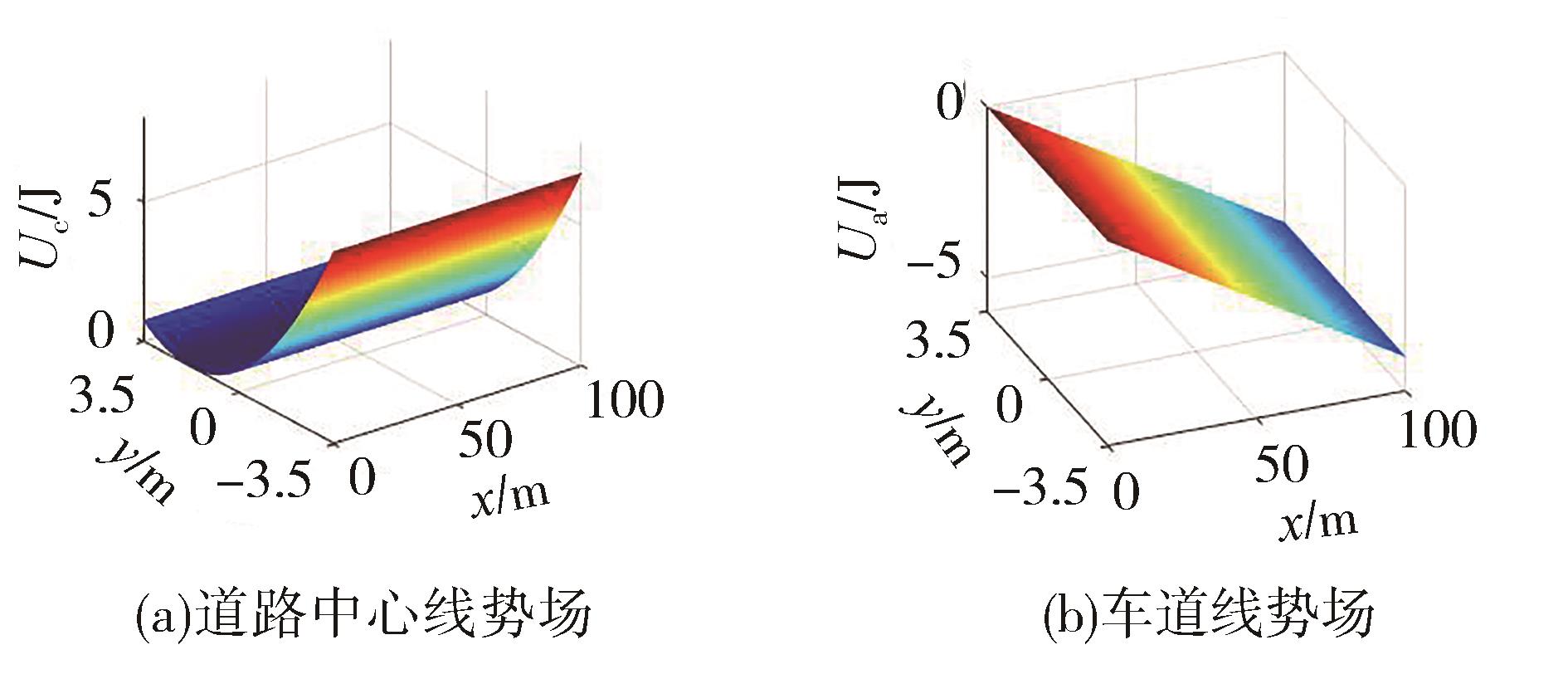
图4
道路边界与车道线势场"
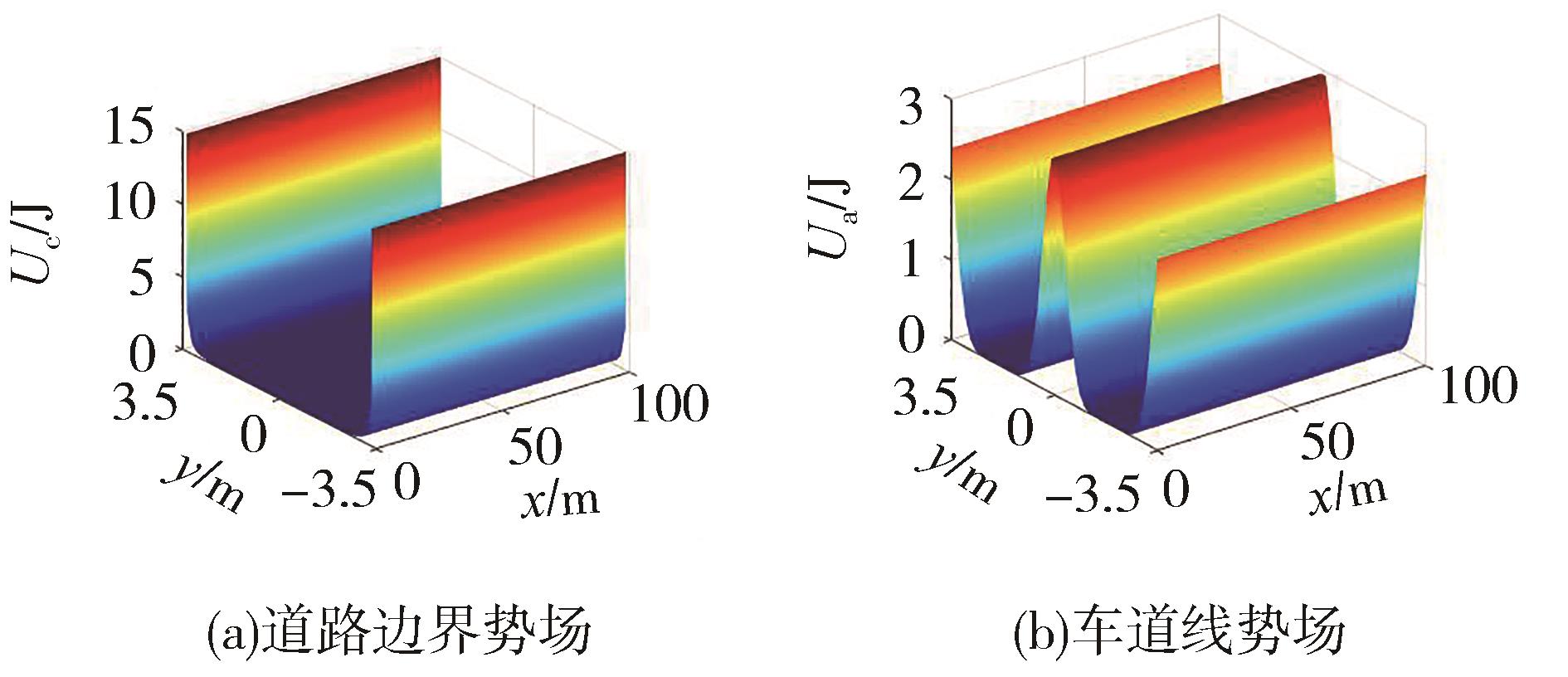
表1
势场参数"
| 势场 | 变量名 | 数值 |
|---|---|---|
| 行人势场 | kp1 kp2 kp3 | 15 5 1 |
| 道路中心线势场 | Kc | 0.05 |
| 方向引力势场 | Ka | 1 |
| 道路边界势场 | Ke | 0.1 |
| 车道线势场 | Kl | 4 |
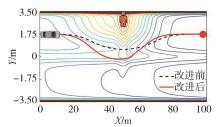
图5
期望避撞路径"
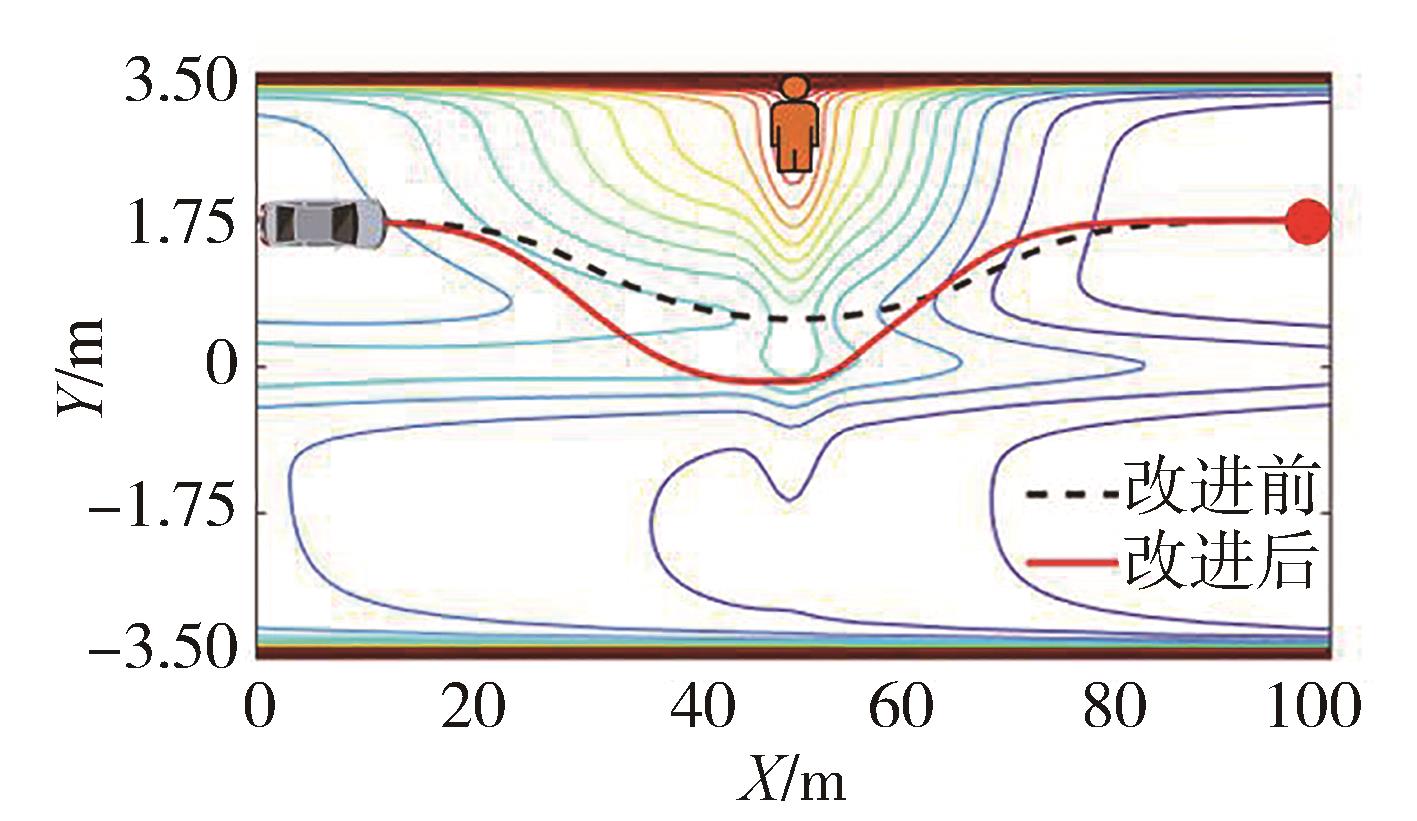
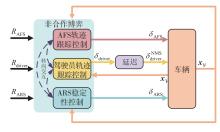
图6
基于非合作博弈的驾驶员-AFS-ARS控制框架"
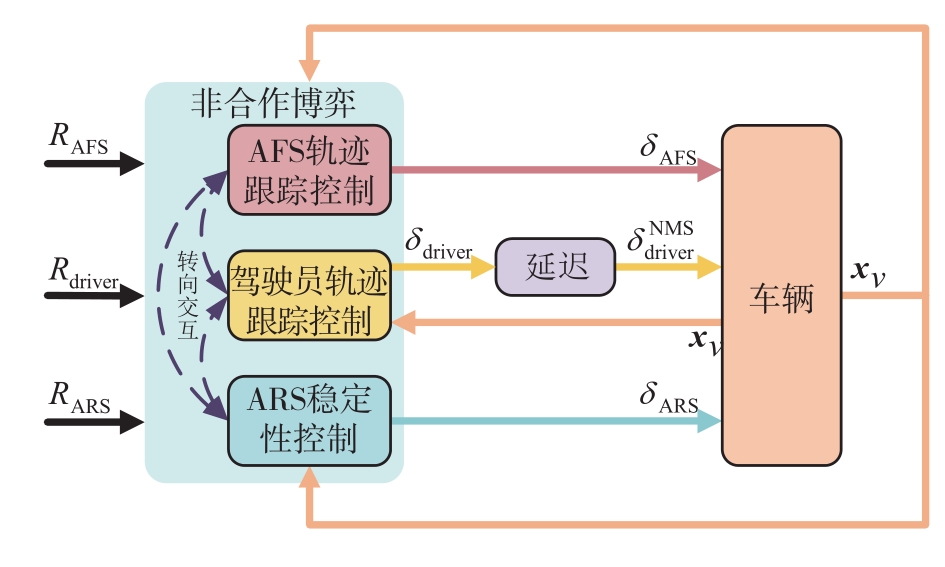

图7
车辆模型"
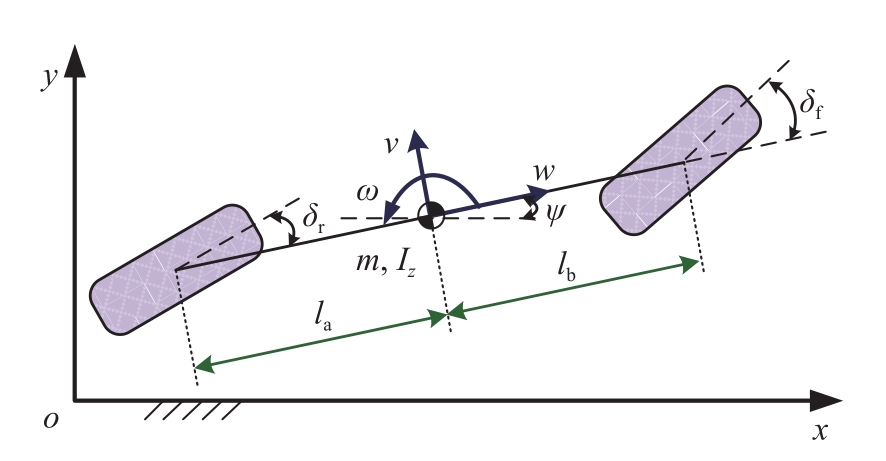
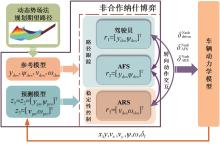
图8
驾驶员-AFS-ARS协同控制策略"
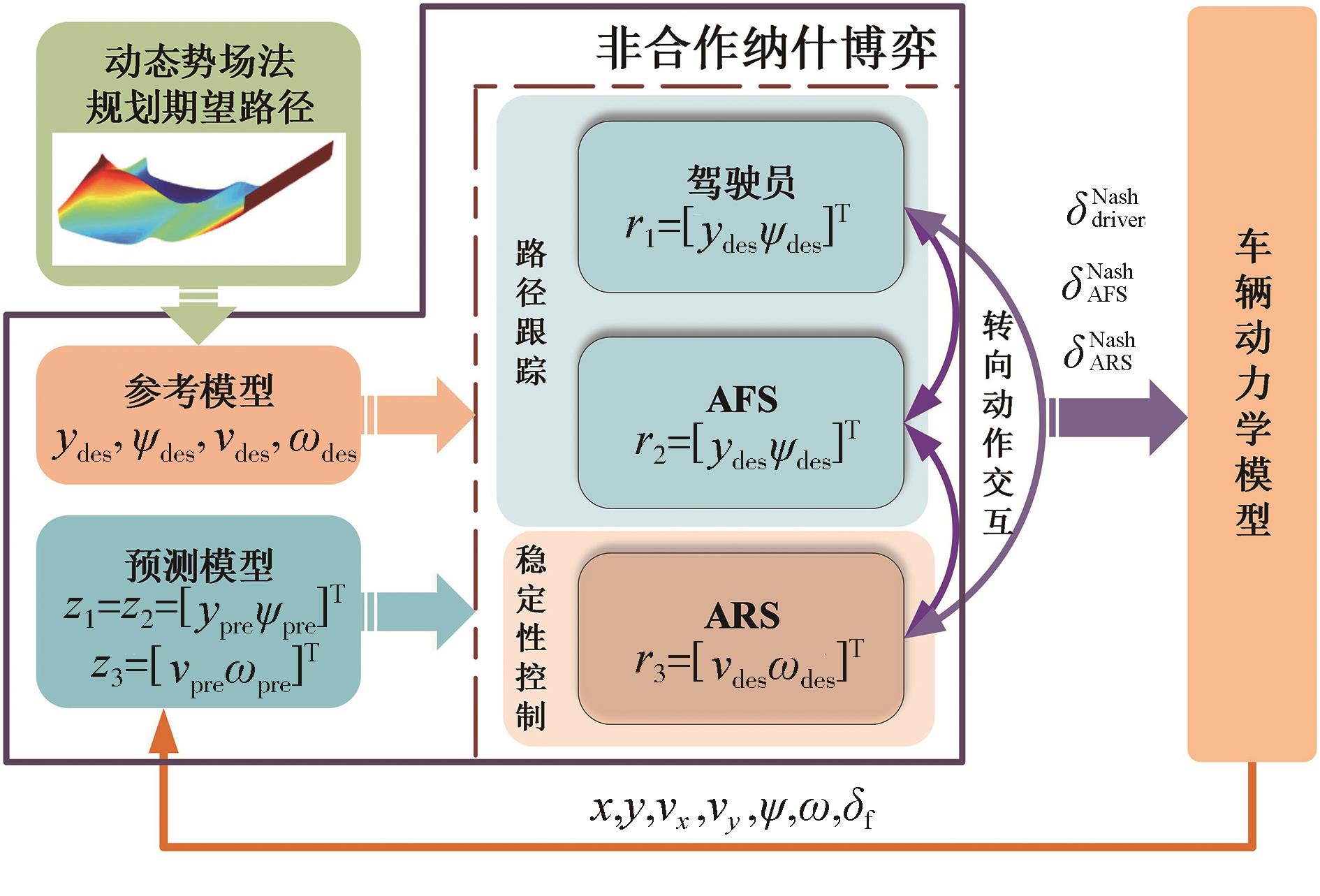
表2
车辆主要技术参数"
| 变量 | 数值 |
|---|---|
| 整车质量m /kg | 1 412 |
| 车辆绕z轴转动惯量Iz /(kg·m2) | 1 536 |
| 前轮侧偏刚度Cf/(N·rad-1) | -114 592 |
| 后轮侧偏刚度Cr/(N·rad-1) | -114 592 |
| 质心到前轴距离la/m | 1.015 |
| 质心到后轴距离lb/m | 1.895 |
| 车辆前轴长度tf/m | 1.675 |
| 车辆后轴长度tr/m | 1.675 |

图9
横摆角速度对比"
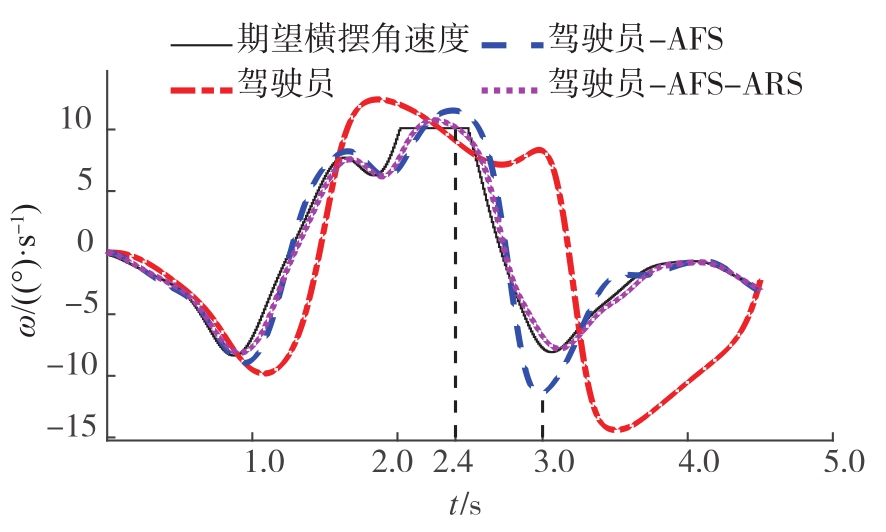
图10
横向速度对比"
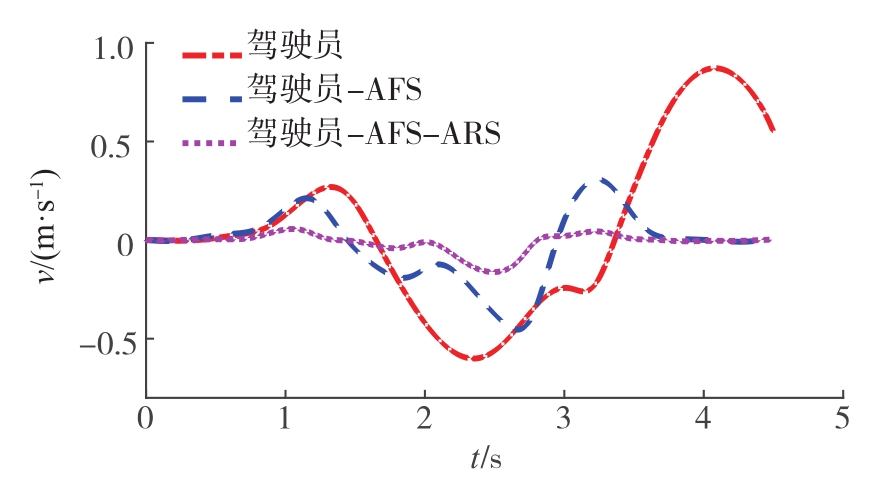
图11
行驶轨迹对比"
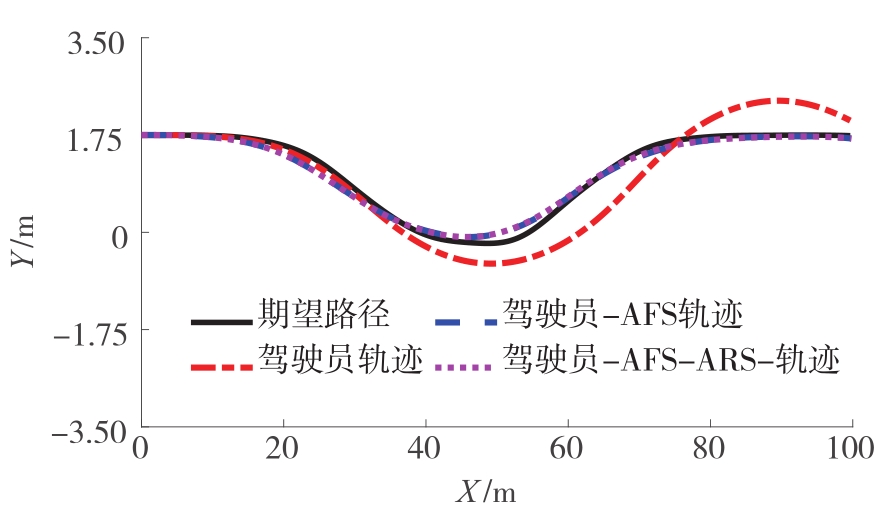
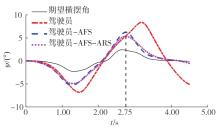
图12
横摆角对比"

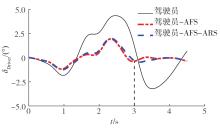
图13
驾驶员前轮转角对比"

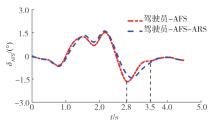
图14
AFS转角对比"
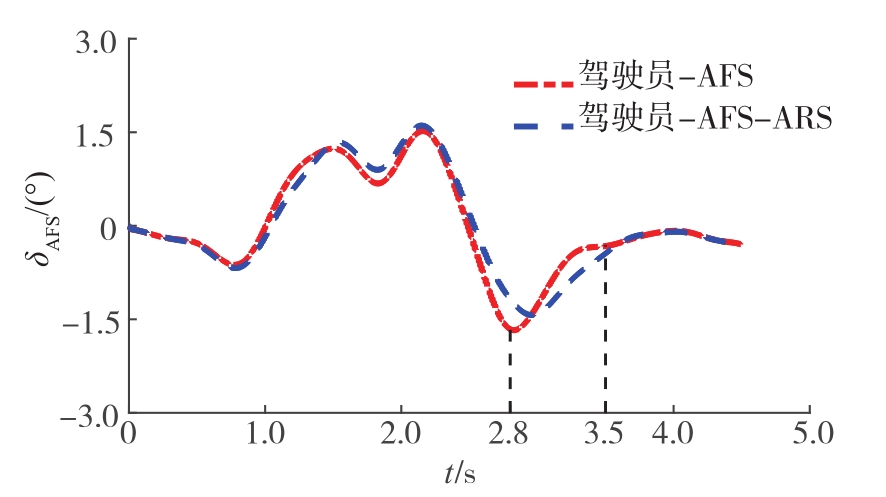
表3
控制器效果对比"
| 项目 | Ye/m | ψe/(o) | ωe/((o)·s-1) | ve/(m·s-1) |
|---|---|---|---|---|
| 驾驶员-AFS | 0.023 2 | 0.030 | 0.083 5 | 0.022 4 |
驾驶员- AFS-ARS | 0.020 8 | 0.028 | 0.076 8 | 0.012 0 |
| 改善率 | 10.34% | 6.67% | 8.02% | 46.43% |
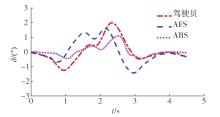
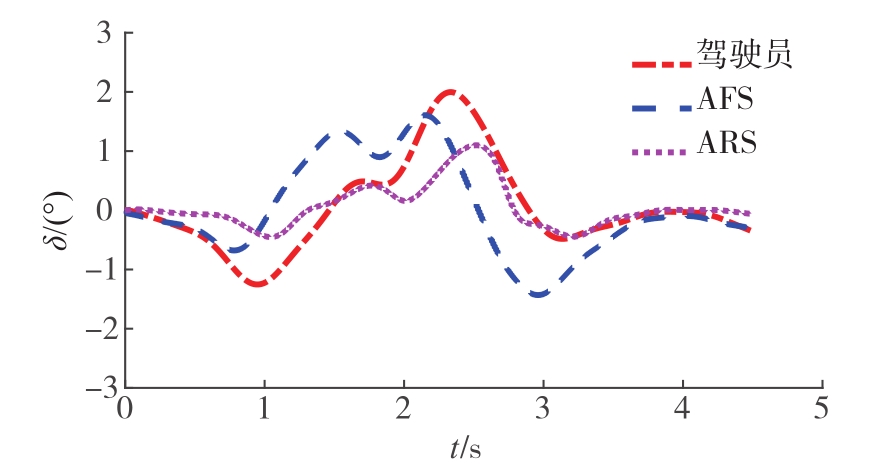
图15
三者协同时各参与者转角变化"
| 1 | World Health Organization. Global status report on road safety 2018: summary[R], 2018. |
| 2 | YUE L, ABDEL-ATY M, WU Y, et al. Effects of forward collision warning technology in different pre-crash scenarios[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 76: 336-352. |
| 3 | ZENG J, YU Y, DING X, et al. AEB-pedestrian protection model simulation and real vehicle application[C]. Sixth International Conference on Electromechanical Control Technology and Transportation. SPIE, 2022, 12081: 873-882. |
| 4 | CHRISTER A, MARIA G L, MATS N, et al. The effect of an active steering system on city bus drivers’ muscle activity[J]. International Journal of Occupational Safety and Ergonomics, 2019, 25(3): 377-385. |
| 5 | MARCANO M, SERGIO D, JOSHUé P, et al. A review of shared control for automated vehicles: theory and applications[J]. IEEE Transactions on Human-Machine Systems, 2020, 50(6): 475-491. |
| 6 | XING Y, LV C, CAO D, et al. Toward human-vehicle collaboration: review and perspectives on human-centered collaborative automated driving[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103199. |
| 7 | WANG W, NA X, CAO D, et al. Decision-making in driver-automation shared control: a review and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. |
| 8 | NA X, COLE D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2014, 45(1): 25-38. |
| 9 | JI X, LIU Y, NA X, et al. Research on interactive steering control strategy between driver and AFS in different game equilibrium strategies and information patterns[J]. Vehicle System Dynamics, 2018, 56(9): 1344-1374. |
| 10 | KO S, LANGARI R. Shared control between human driver and machine based on game theoretical model predictive control framework[C]. IEEE ASME International Conference on Advanced Intelligent Mechatronics, 2020: 649-654. |
| 11 | LI M, SONG X, CAO H, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. |
| 12 | ZHANG B, LU S, XIE F, et al. Stochastic cooperative game-based assistant fault-tolerant control considering driver behavior uncertainty[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2):2595-2607. |
| 13 | ZHANG Z, ZHANG H, ZHAO W. A human-vehicle game stability control strategy considering drivers’ steering characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(11): 7306-7316. |
| 14 | 安林芳, 陈涛, 成艾国, 等. 基于人工势场算法的智能车辆路径规划仿真[J]. 汽车工程, 2017, 39(12):1451-1456. |
| AN L F, CHEN T, CHENG A G, et al. Study on the simulation of autonomous vehicle path planning based on artificial potential field algorithm[J]. Autonomous Engineering, 2017, 39(12):1451-1456. | |
| 15 | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG J Q, WU J, LI Y. Study on the concept, principle and modeling of driving risk field based on human-vehicle-road coordination[J]. Chinese Journal of Highways, 2016, 29(1): 105-114. | |
| 16 | 李亚勇, 蔡英凤, 陈龙, 等. 考虑前后方车辆行驶状态的ACC系统控制方法[J]. 汽车工程, 2019, 41(8): 865-871. |
| LI Y Y, CAI Y F, CHEN L, at al. ACC system control method considering the driving state of front and rear vehicles[J]. Automotive Engineering, 2019, 41(8): 865-871. | |
| 17 | HONGYU H U, CHI Z, YUHUAN S, et al. An improved artificial potential field model considering vehicle velocity for autonomous driving[J]. IFAC-PapersOnLine, 2018, 51(31): 863-867. |
| 18 | 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6): 174-182. |
| TANG Z R, JI J, WU M Y, et al.Study on vehicle path planning and tracking based on improved artificial potential field method[J]. Journal of Southwest University (Natural Science Edition) , 2018, 40(6): 174-182. | |
| 19 | WAHID N, ZAMZURI H, RAHMAN M A A, et al. Study on potential field based motion planning and control for automated vehicle collision avoidance systems[C]. IEEE International Conference on Mechatronics, 2017: 208-213. |
| 20 | MICHAEL T, JOEL W. Artificial potential functions for highway driving with collision avoidance[C]. IEEE International Conference on Robotics and Automation, 2008: 3731-3736. |
| 21 | 李彩霞, 卢少波, 张博涵,等. 基于行人位置预测的人车转向避撞路径规划[J]. 汽车工程, 2021, 43(6):877-884. |
| LI C X, LU S B, ZHANG B H, et al. Study on collision avoidance path planning for pedestrians and vehicles based on pedestrian position prediction[J]. Automotive Engineering, 2021, 43(6): 877-884. | |
| 22 | KIM N, COLE D J. A model of driver steering control incorporating the driver’s sensing of steering torque[J]. Vehicle System Dynamics, 2011, 49(10): 1575-1596. |
| 23 | NA X, COLE D J. Linear quadratic game and non-cooperative predictive methods for potential application to modelling driver–AFS interactive steering control[J]. Vehicle System Dynamics, 2013, 51(2): 165-198. |
| [1] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [2] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [3] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [4] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [5] | 李子先,潘世举,徐友春. 8轮分布式电驱动车辆AFS和DYC协同控制[J]. 汽车工程, 2023, 45(3): 409-420. |
| [6] | 李琴,汤建明,张博远,陈勇,王勇. 分布式驱动电动汽车多执行器容错控制研究[J]. 汽车工程, 2023, 45(12): 2251-2259. |
| [7] | 徐璞磊,蔡英凤,廉玉波,孙晓强,王海,陈龙,钟益林. 基于改进分层可拓理论的智能汽车AFS/DYC协调控制[J]. 汽车工程, 2023, 45(1): 20-31. |
| [8] | 胡满江,卜令坤,秦洪懋,周岩,边有钢,孙宁,郑讯佳. 多类时延下混合车辆队列建模与协同控制[J]. 汽车工程, 2022, 44(9): 1359-1371. |
| [9] | 彭理群,王依婷,马育林,许述财. 面向混合自动驾驶车流的协同自适应巡航控制[J]. 汽车工程, 2022, 44(8): 1153-1161. |
| [10] | 李道飞,查安飞,徐彪,张家杰. 半挂汽车列车紧急避撞轨迹跟踪控制算法[J]. 汽车工程, 2022, 44(7): 1098-1106. |
| [11] | 丛森森,高峰,许述财. 基于动态稳定域的车辆横纵向稳定性协同控制[J]. 汽车工程, 2022, 44(6): 900-908. |
| [12] | 方培俊,蔡英凤,陈龙,廉玉波,王海,钟益林,孙晓强. 基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法[J]. 汽车工程, 2022, 44(10): 1469-1483. |
| [13] | 王宏伟,刘晨宇,李磊,张昊天. 基于高效NMPC算法的无人车轨迹跟踪控制研究[J]. 汽车工程, 2022, 44(10): 1494-1502. |
| [14] | 牛国臣,李文帅,魏洪旭. 基于双五次多项式的智能汽车换道轨迹规划[J]. 汽车工程, 2021, 43(7): 978-986. |
| [15] | 张志勇,龙凯,杜荣华,黄彩霞. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
|