汽车工程 ›› 2023, Vol. 45 ›› Issue (8): 1299-1308.doi: 10.19562/j.chinasae.qcgc.2023.08.001
所属专题: 智能网联汽车技术专题-规划&决策2023年
• • 下一篇
梅润1,褚端峰2,高博麟3( ),李克强3,丛炜3,陈超义3
),李克强3,丛炜3,陈超义3
Run Mei1,Duanfeng Chu2,Bolin Gao3(),Keqiang Li3,Wei Cong3,Chaoyi Chen3
摘要:
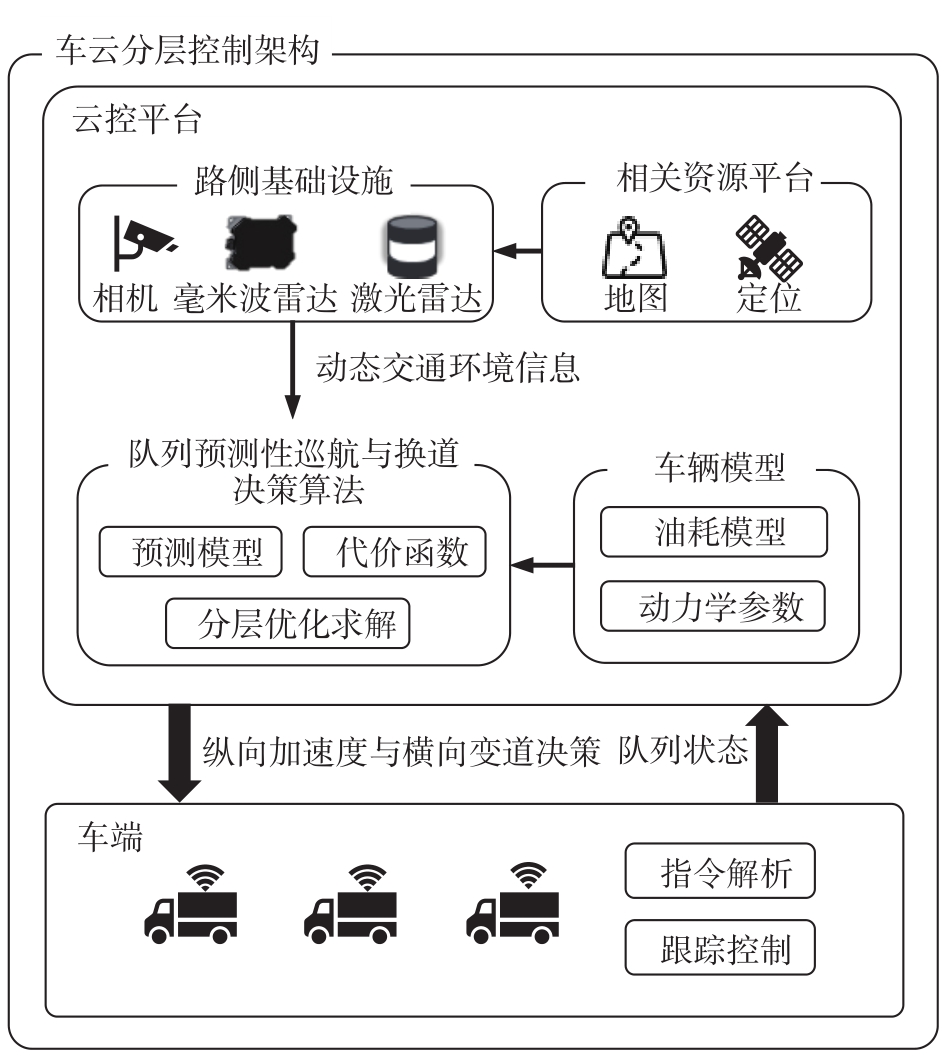
为了提高队列行驶的安全性、经济性、高效性和平顺性,提出了基于云控系统的队列预测性巡航与换道决策方法。通过路侧基础设施获取动态交通信息,并上传云平台;云平台利用预测模型估计环境车辆的未来状态;队列采取不同的行为而获得的惩罚体现在设计的目标函数中,通过最小化目标函数实现纵向加速度与横向换道决策的协同优化,并将决策结果发送至车端进行跟踪控制。利用Sumo与Matlab搭建联合仿真环境,设计了不同交通流量下的5组仿真工况。结果表明:对比微观驾驶模型(IDM+MOBIL),采用该方法的队列在巡航时碰撞风险降低42.2%,换道时碰撞风险降低3.41%,平均节油率为1.22%,速度提升0.83%,平顺性提高49.84%,在安全性、经济性、高效性和平顺性方面均优于微观驾驶模型。