汽车工程 ›› 2022, Vol. 44 ›› Issue (3): 299-307.doi: 10.19562/j.chinasae.qcgc.2022.03.001
所属专题: 智能网联汽车技术专题-规划&控制2022年
• • 下一篇
李鹏飞1,罗禹贡1,刘畅1,孔伟伟1,2( )
)
Pengfei Li1,Yugong Luo1,Chang Liu1,Weiwei Kong1,2()
摘要:
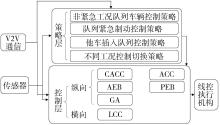
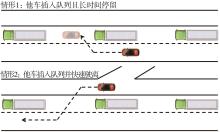
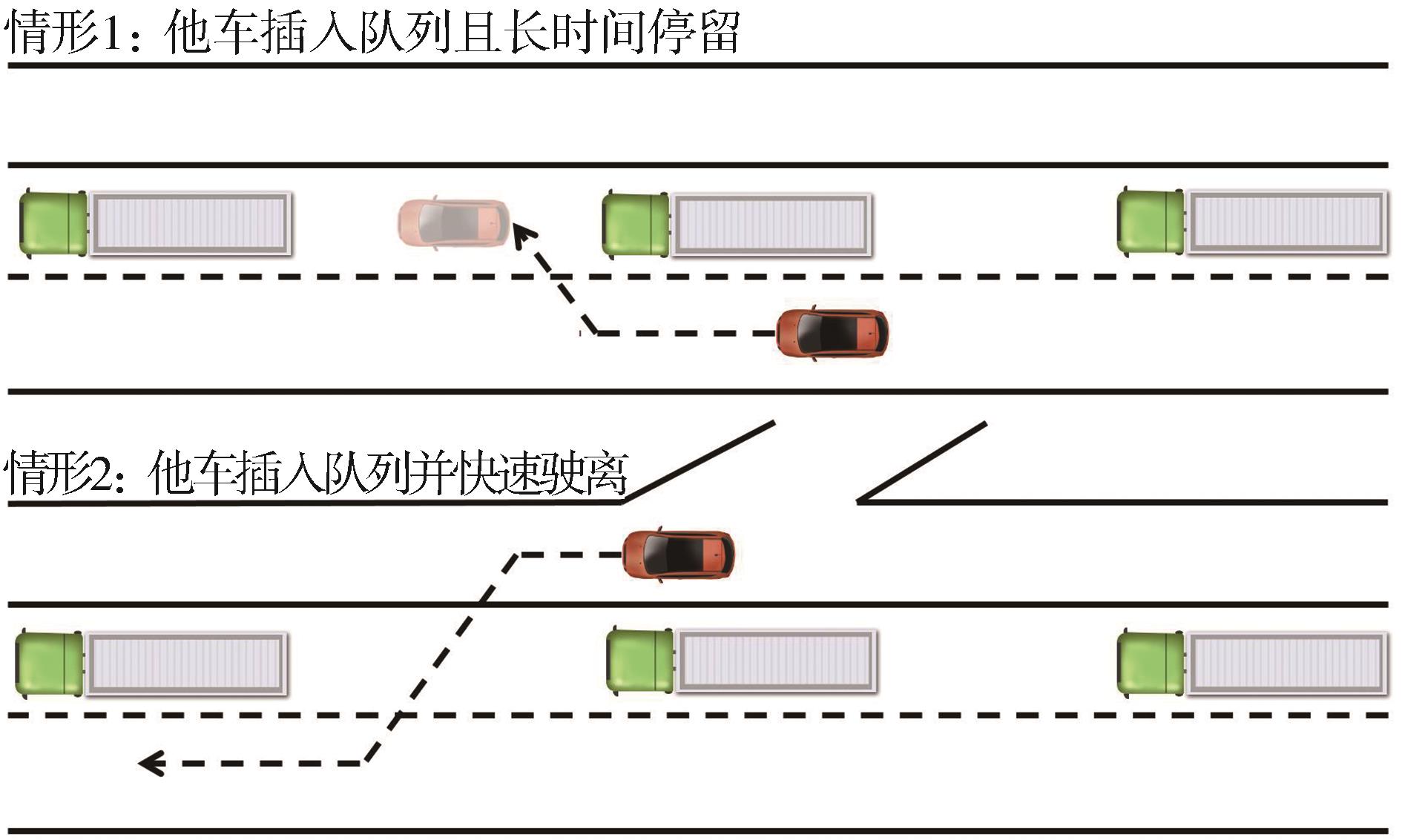
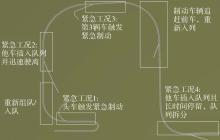
目前针对紧急工况的智能网联车辆队列控制研究较为欠缺,为了解决高速公路车辆队列在紧急工况下安全、稳定控制问题,本文针对队列紧急制动、他车插入队列这两种紧急工况开展控制策略研究。首先,建立控制系统分层架构,由策略层和控制层组成。其中,控制层根据策略层的输出结果激活对应的车辆纵横向控制器;针对策略层,分别设计两种紧急工况的控制策略以及不同工况间的控制切换策略。最后,基于PreScan/Simulink搭建高速公路车辆队列控制联合仿真平台,设计包含多个紧急工况的复杂验证场景,完成五车队列在该场景下的仿真验证,并探讨了通信时延对控制性能的影响。仿真结果表明:该队列控制系统能保证队列在两种紧急工况下安全、稳定行驶,并可实现不同工况的切换控制。