汽车工程 ›› 2021, Vol. 43 ›› Issue (12): 1752-1761.doi: 10.19562/j.chinasae.qcgc.2021.12.003
吴晓建1,2,燕冬2,王爱春2,黄菊花1,伍磊1,周兵3( )
)
Xiaojian Wu1,2,Dong Yan2,Aichun Wang2,Juhua Huang1,Lei Wu1,Bing Zhou3()
摘要:
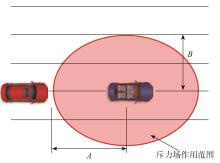
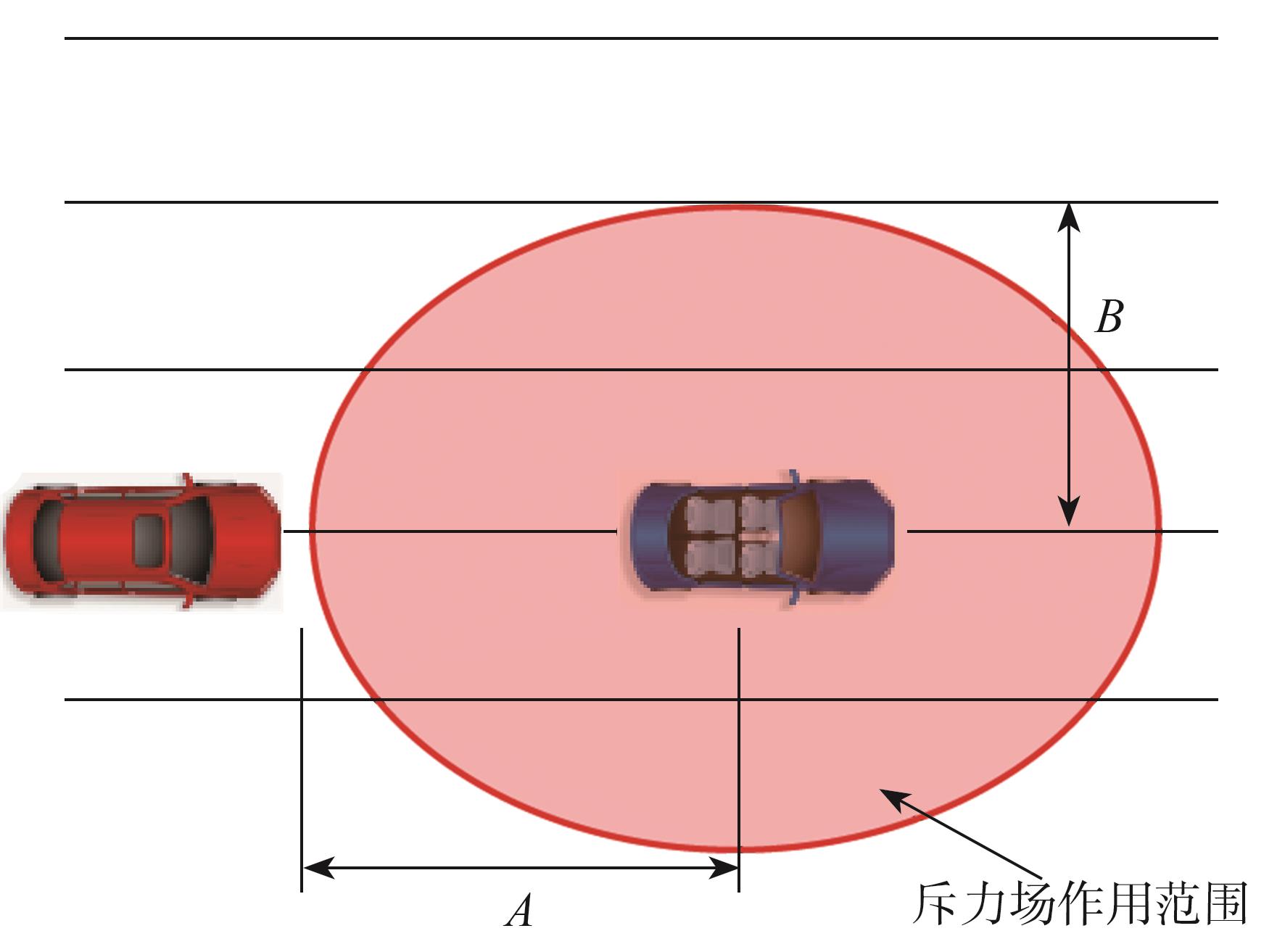
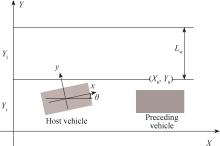
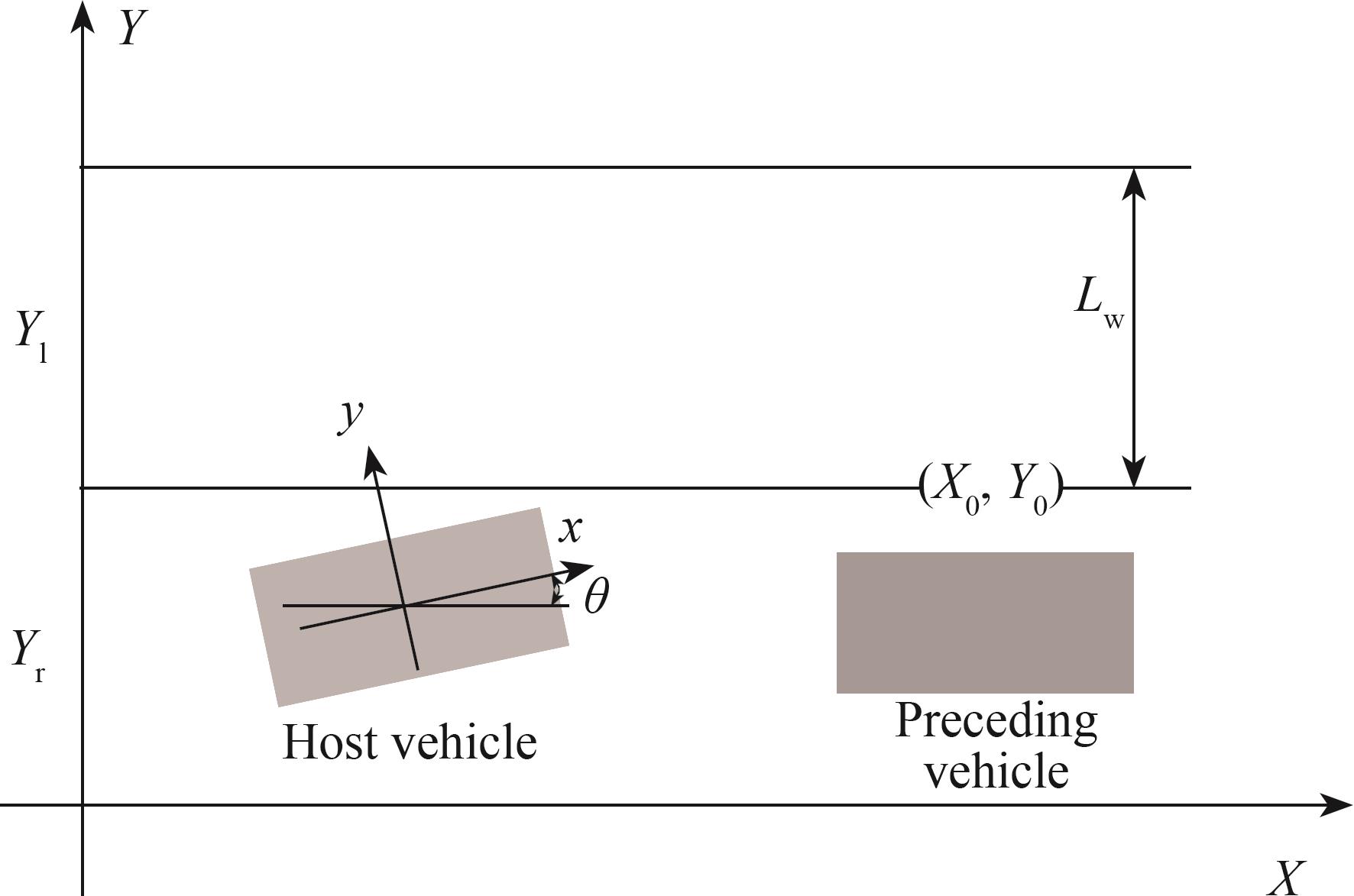
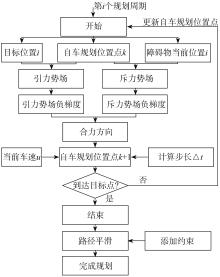
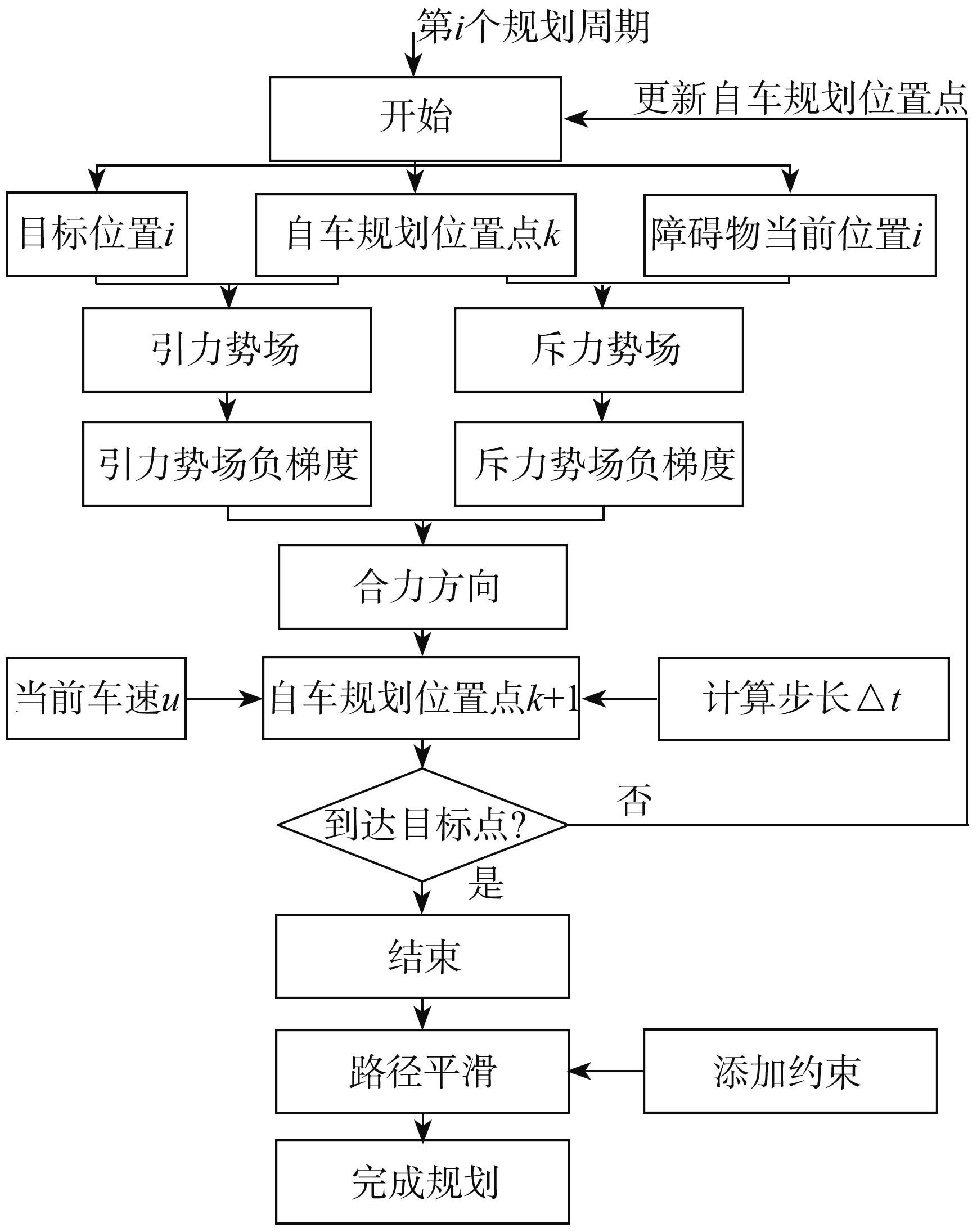
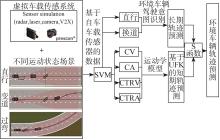
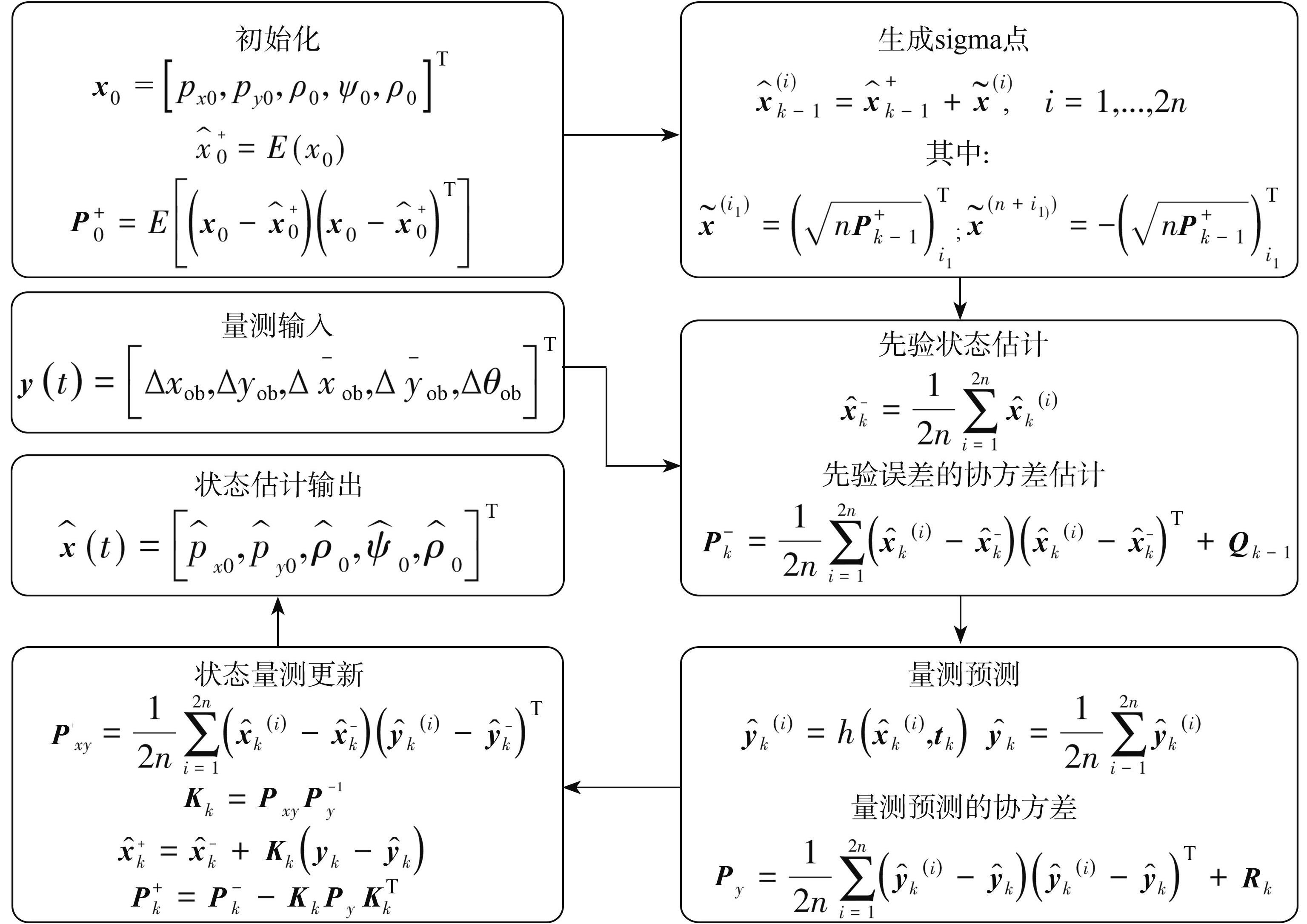
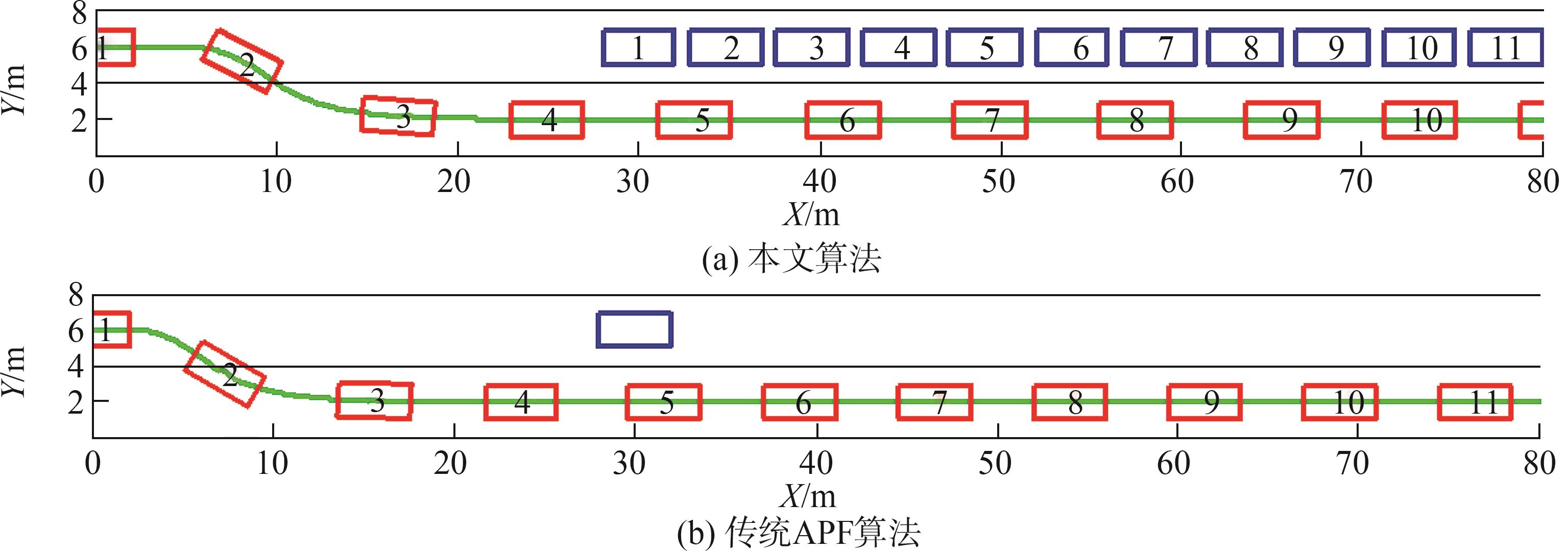
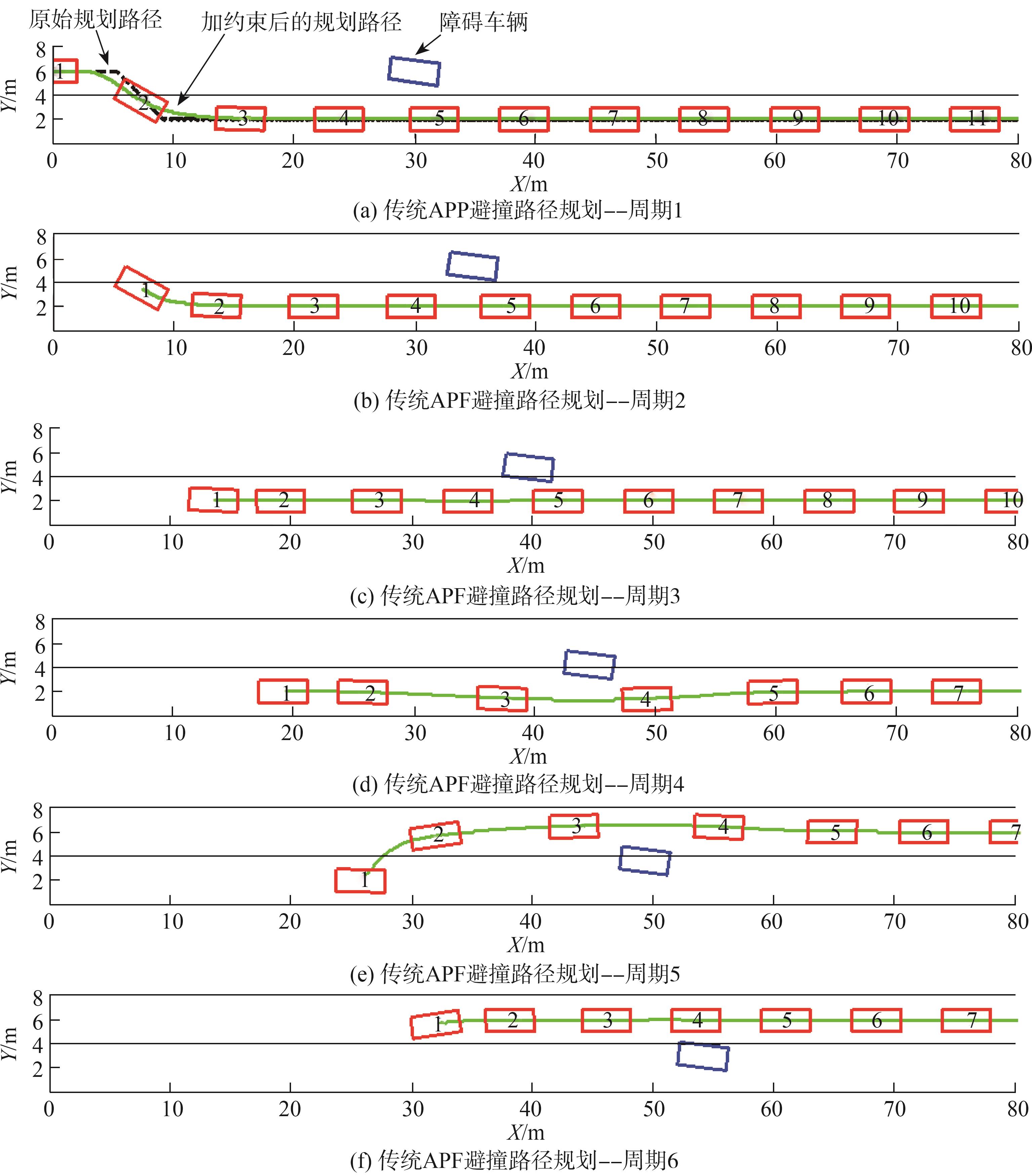
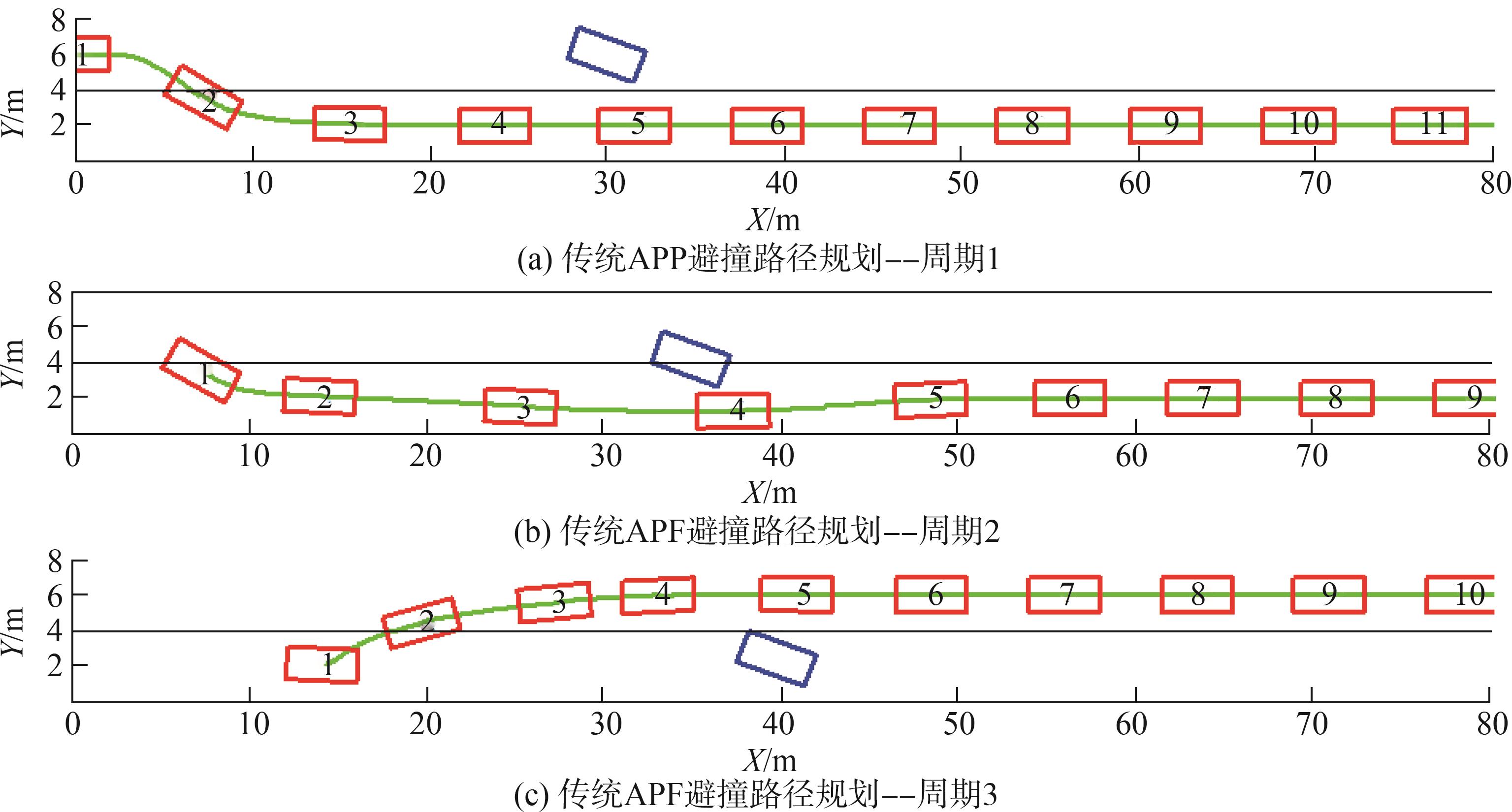
人工势场算法在移动场景中的避撞路径规划很少考虑其与前车未来轨迹的时序耦合影响,基本将每个规划周期内的前车视为静态,通过不同规划周期滚动更新的方式进行准动态路径规划,导致规划路径不够合理、一致性差。本文针对性提出通过时序耦合关联,将前车预测轨迹融入智能汽车路径规划过程。首先构建了改进人工势场算法的引力场及斥力场模型,提出在每个规划周期内,将前车位置在斥力场中根据其预测值进行动态更新;而后提出了基于驾驶意图聚类识别及离散优化结合的前车轨迹长时间预测算法,以及基于运动学模型聚类识别与无迹卡尔曼滤波算法结合的前车轨迹短时间预测算法,再经S函数进行加权融合完成前车轨迹的最终预测。高速驶出及邻车切入等场景下的仿真分析表明,相比于传统的人工势场算法,所提出的改进人工势场动态轨迹规划算法能获得更加合理和一致性更优的规划结果。