汽车工程 ›› 2023, Vol. 45 ›› Issue (9): 1646-1654.doi: 10.19562/j.chinasae.qcgc.2023.09.013
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
马天飞,李波,朱冰( ),赵健
),赵健
Tianfei Ma,Bo Li,Bing Zhu(),Jian Zhao
摘要:
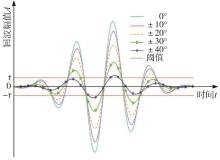
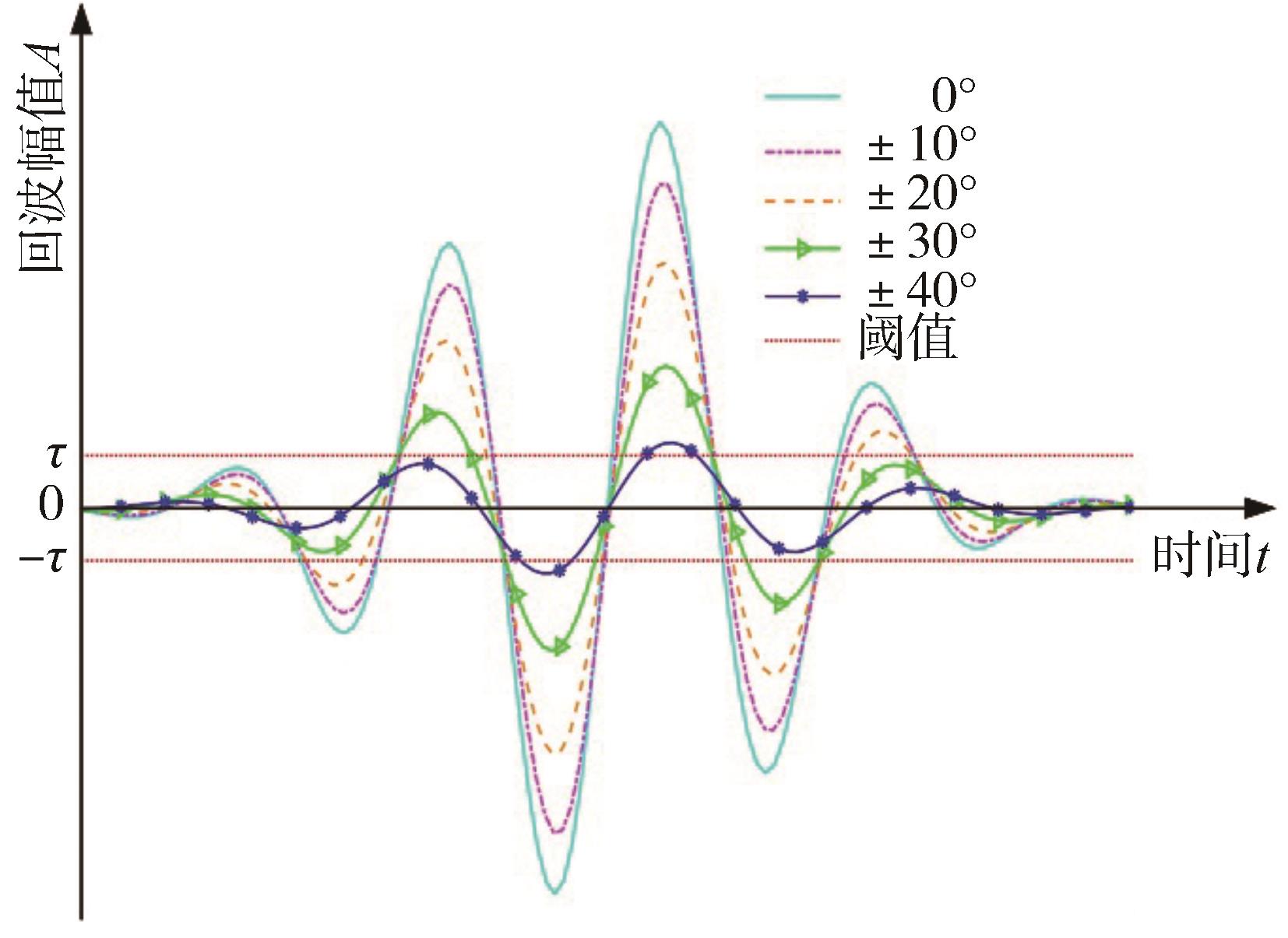
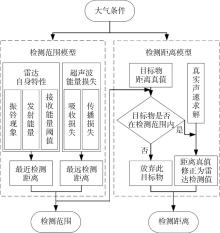
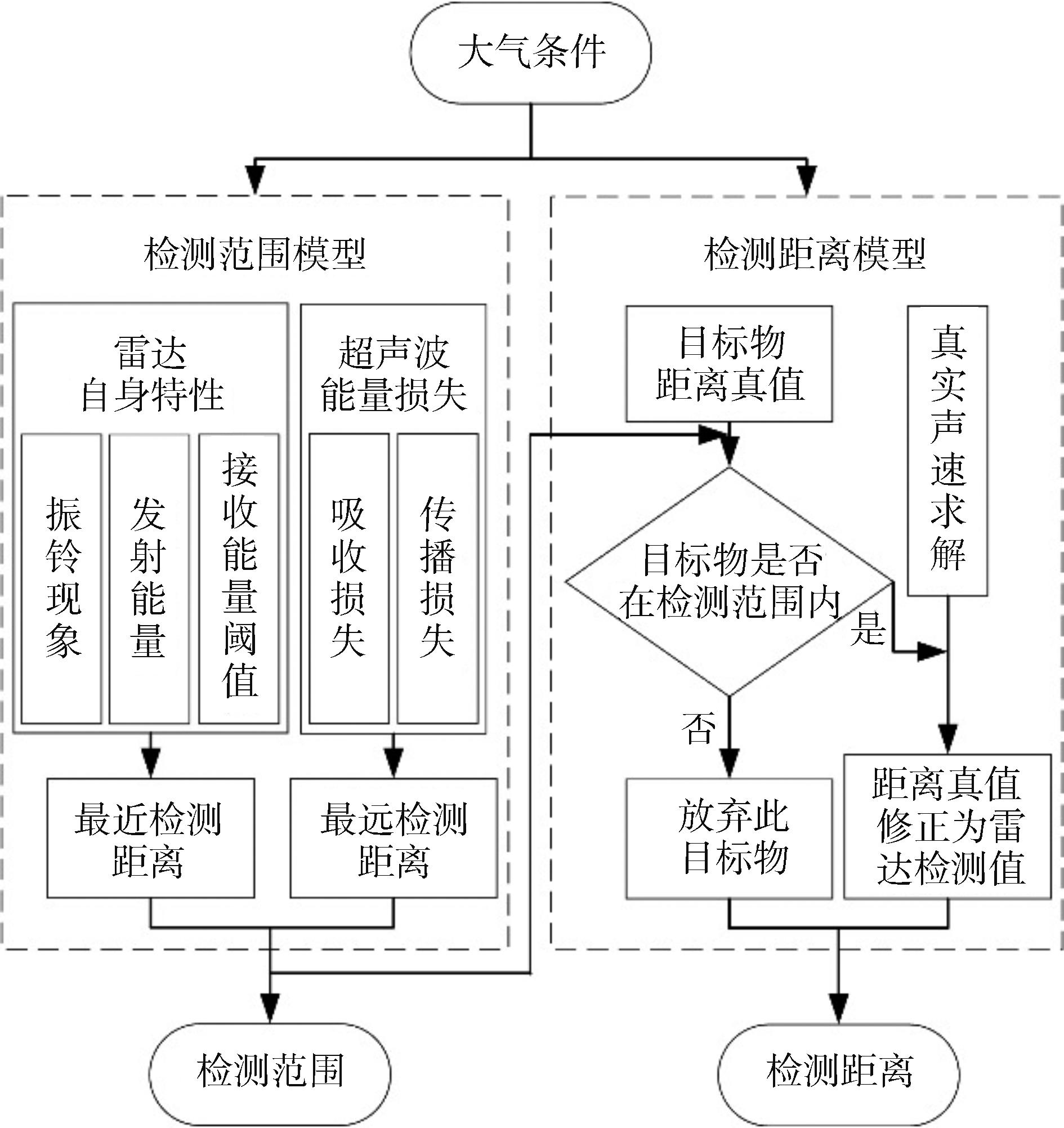
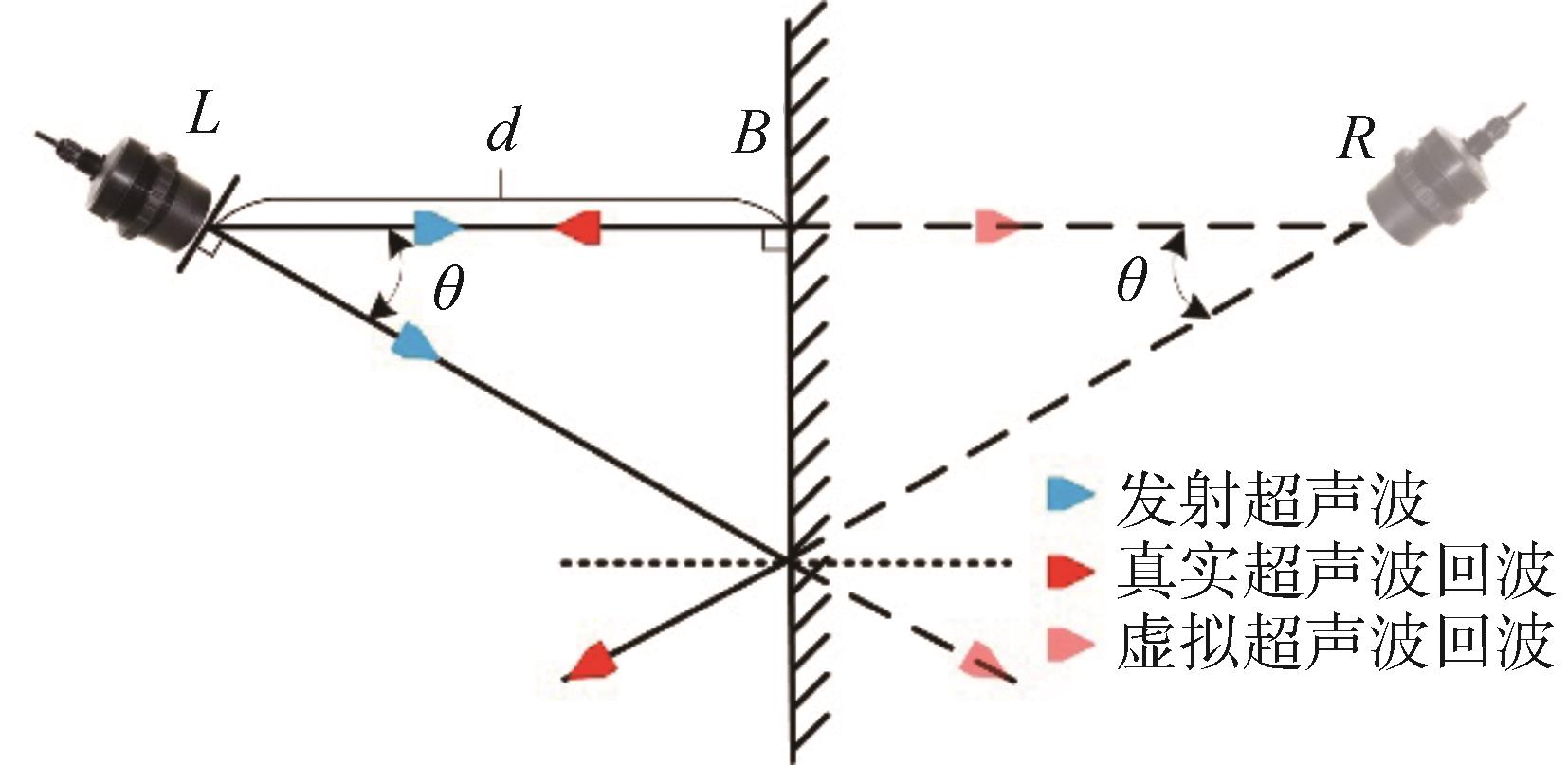
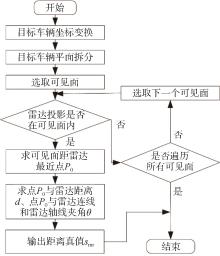
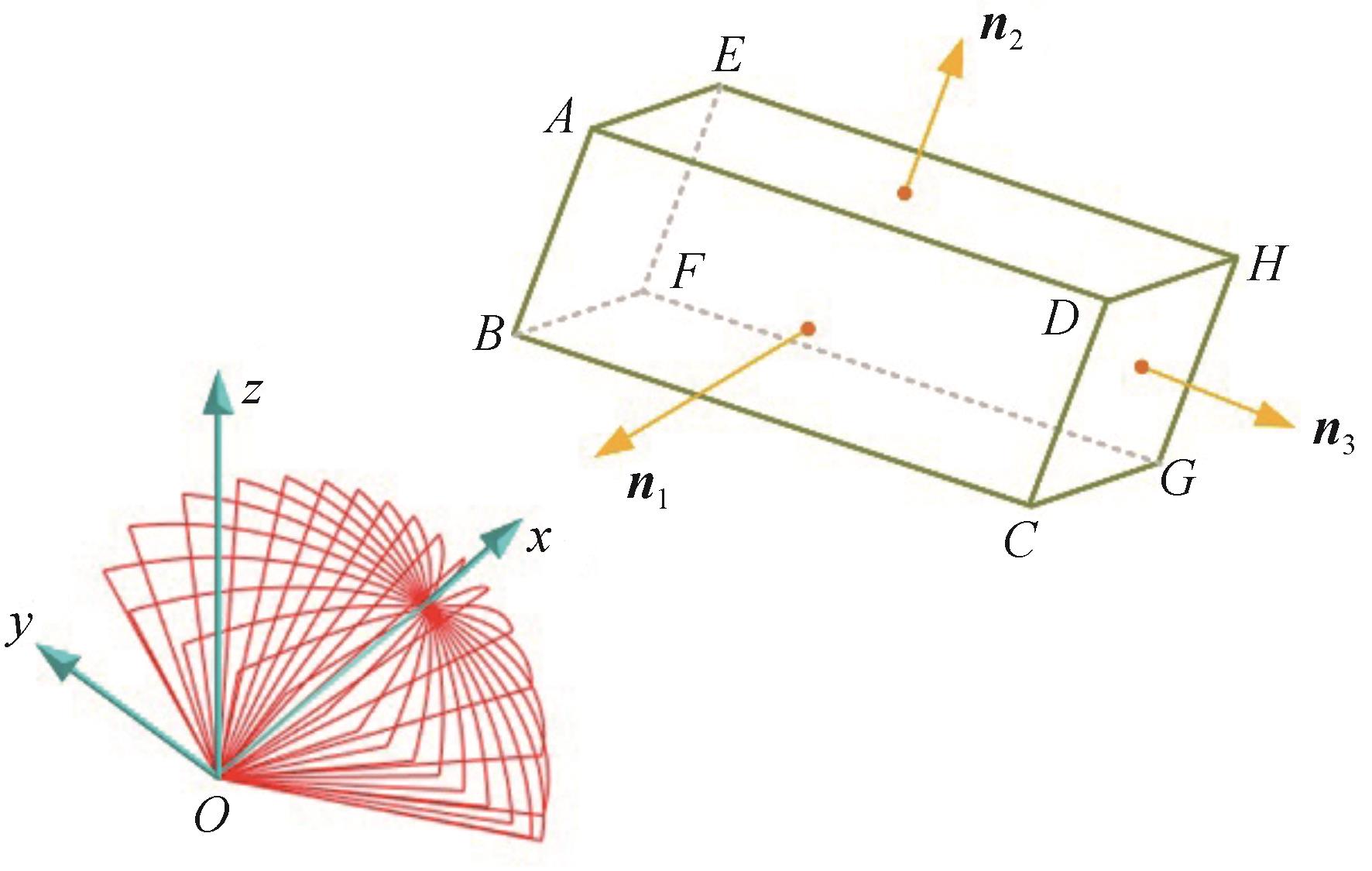
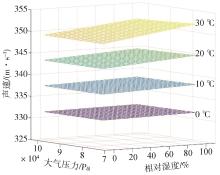
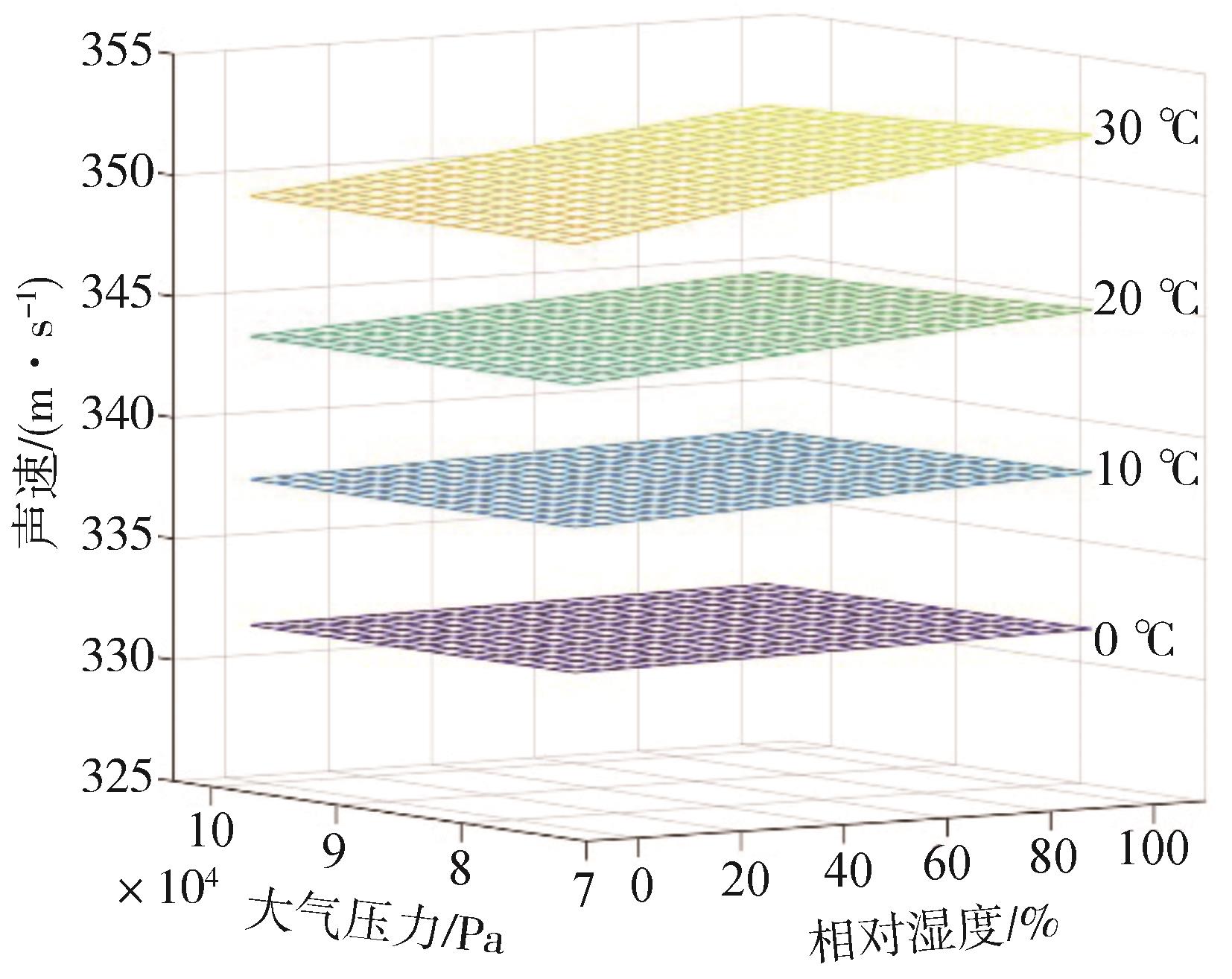
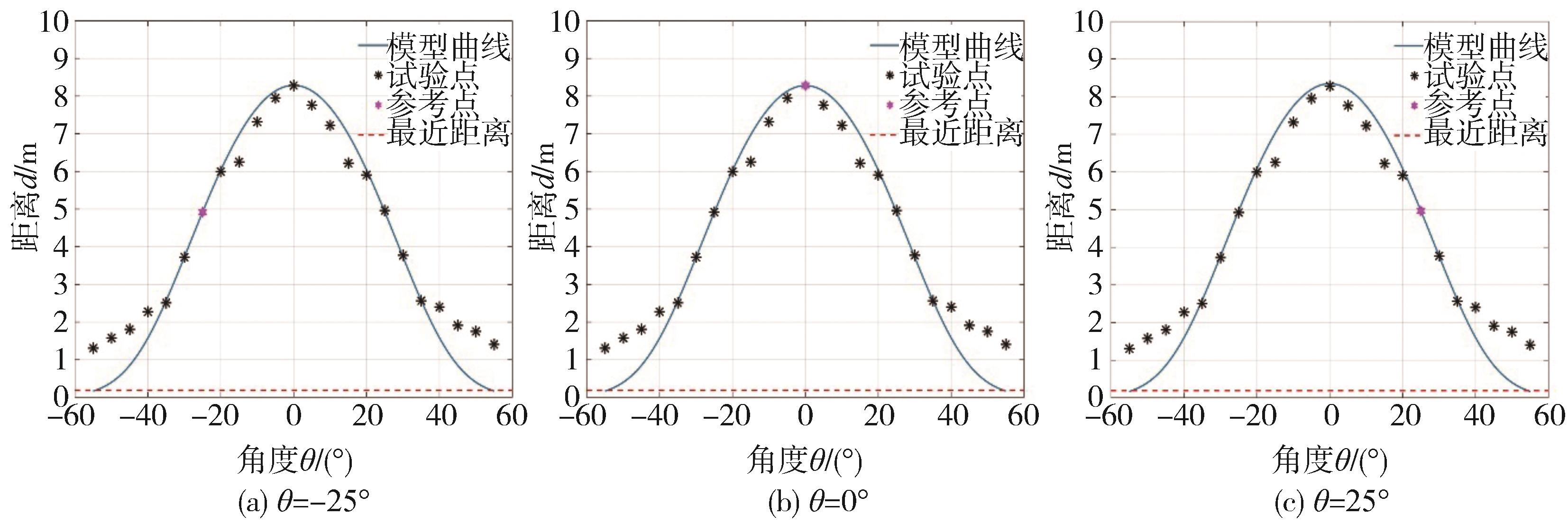
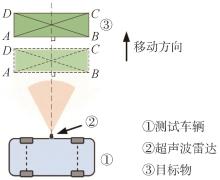
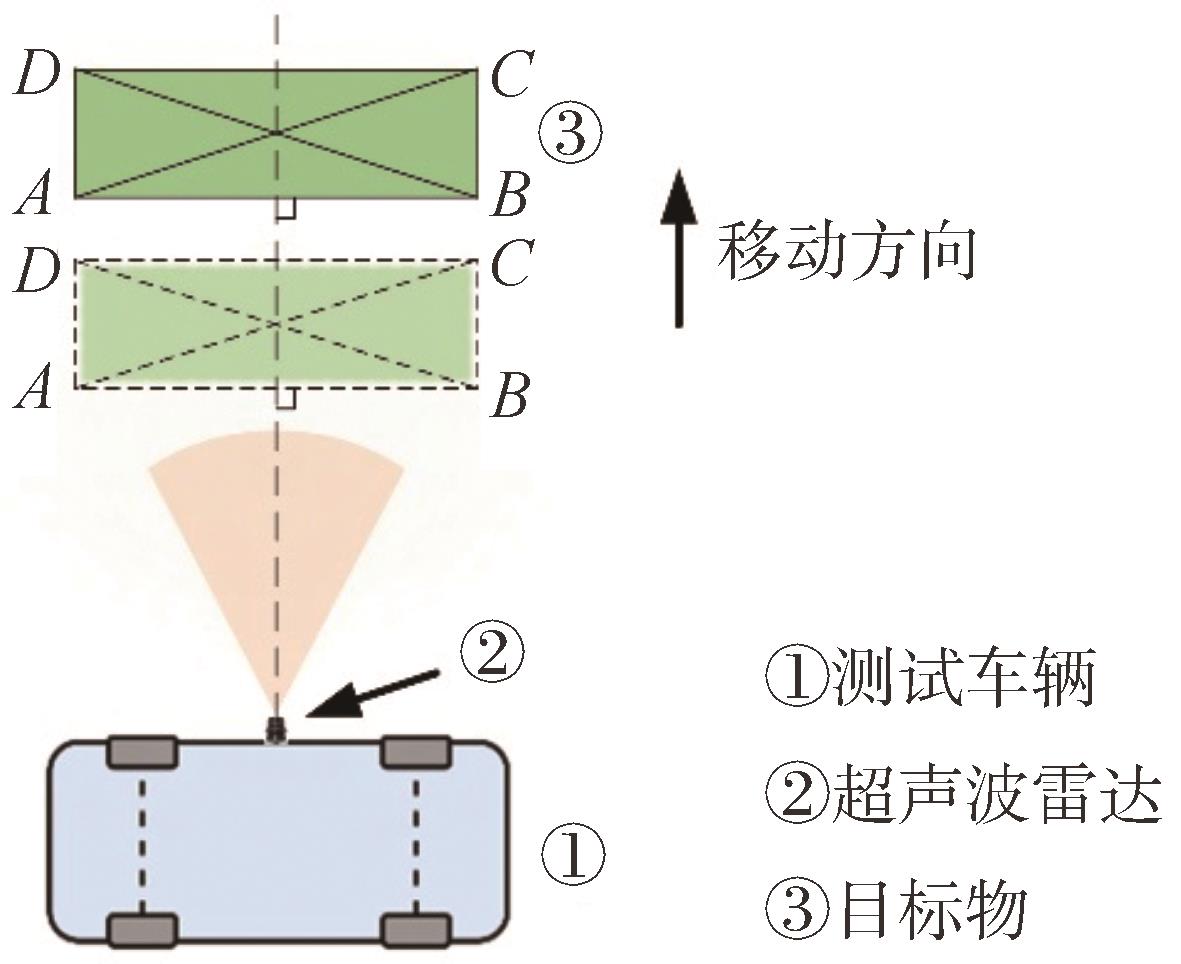
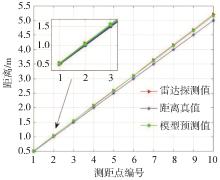
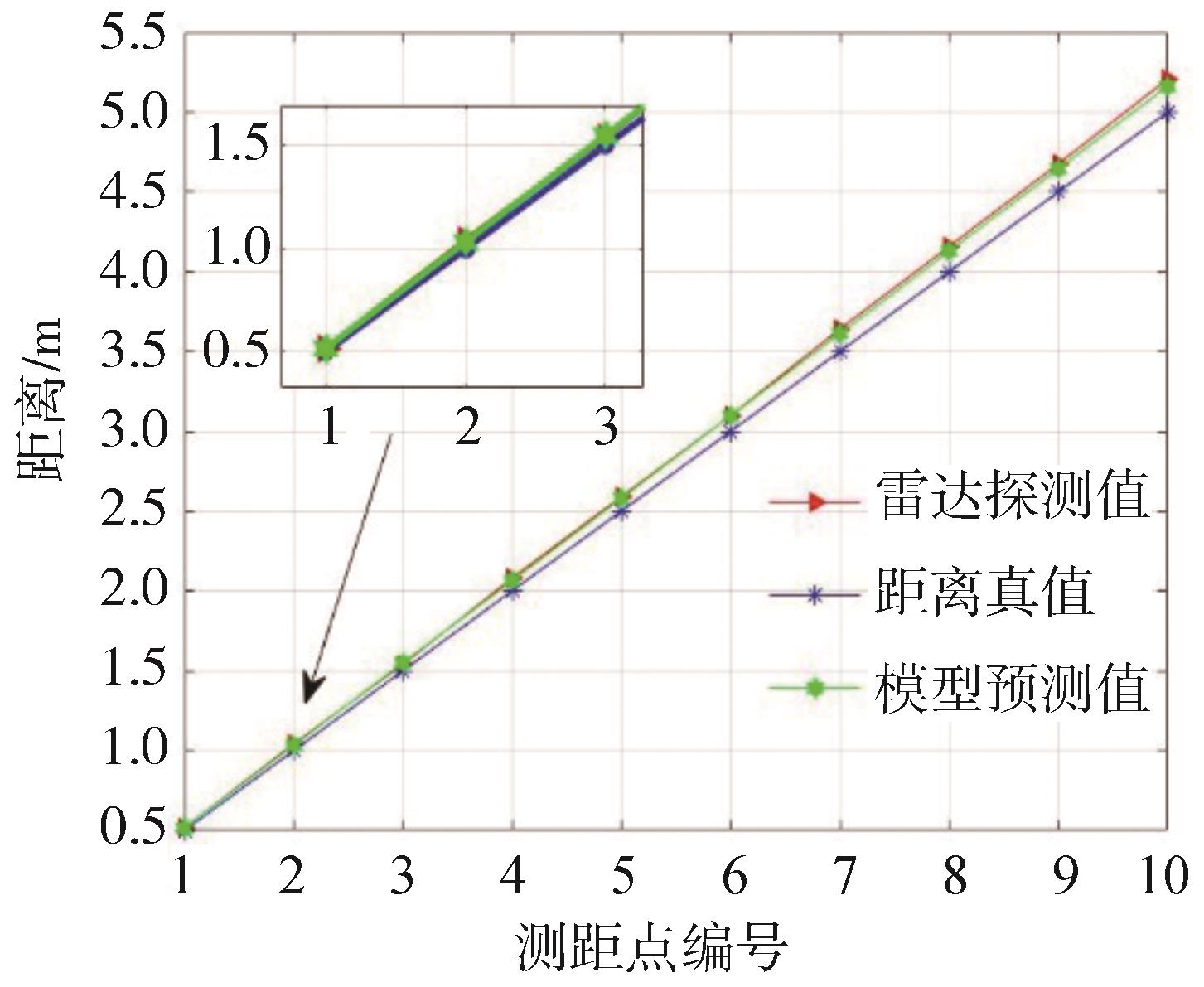
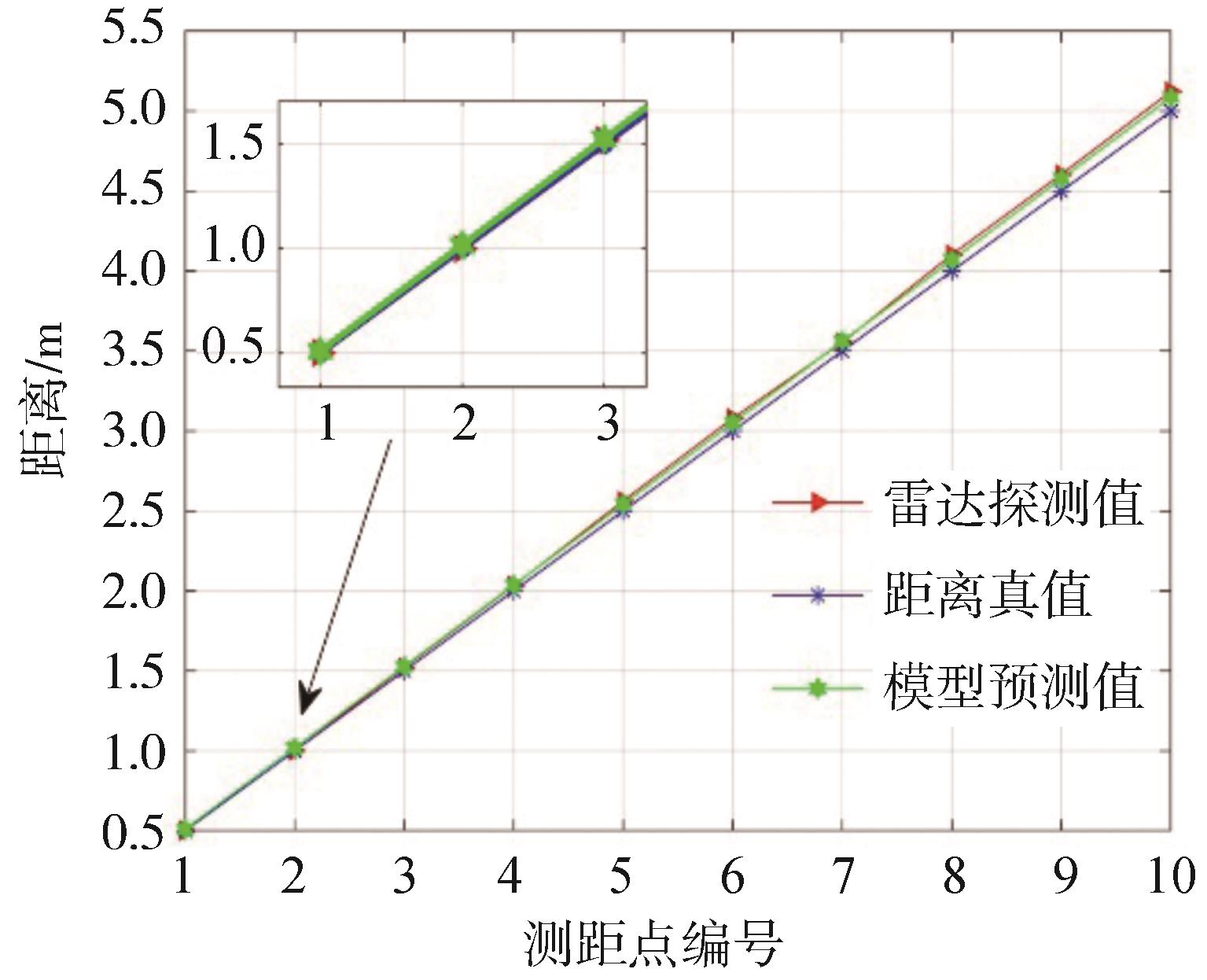
超声波雷达是自动泊车系统最常用的环境感知传感器,而超声波雷达的精确建模是自动泊车系统仿真分析的难点。本文提出了一种考虑大气条件影响的超声波雷达建模方法,将空气温度、湿度、大气压力这3项大气条件纳入建模体系。首先分析了超声波雷达的工作机理,明确了超声波雷达模型应由检测范围模型与检测距离模型两部分组成;而后推导了大气条件、目标物特性和超声波吸收能量损失、传播能量损失之间的定量关系,建立了检测范围模型;并根据大气条件求解真实声速,进一步将距离真值修正为真实超声波雷达检测值,建立了检测距离模型;最后对建立的超声波雷达模型进行了测试验证。结果表明,所建立的超声波雷达模型可以精确模拟超声波雷达在自动泊车场景中的检测范围与检测距离。