汽车工程 ›› 2022, Vol. 44 ›› Issue (7): 1027-1039.doi: 10.19562/j.chinasae.qcgc.2022.07.009
所属专题: 智能网联汽车技术专题-规划&控制2022年
张书恺,陈慧( ),刘美岑
),刘美岑
Shukai Zhang,Hui Chen(),Meicen Liu
摘要:
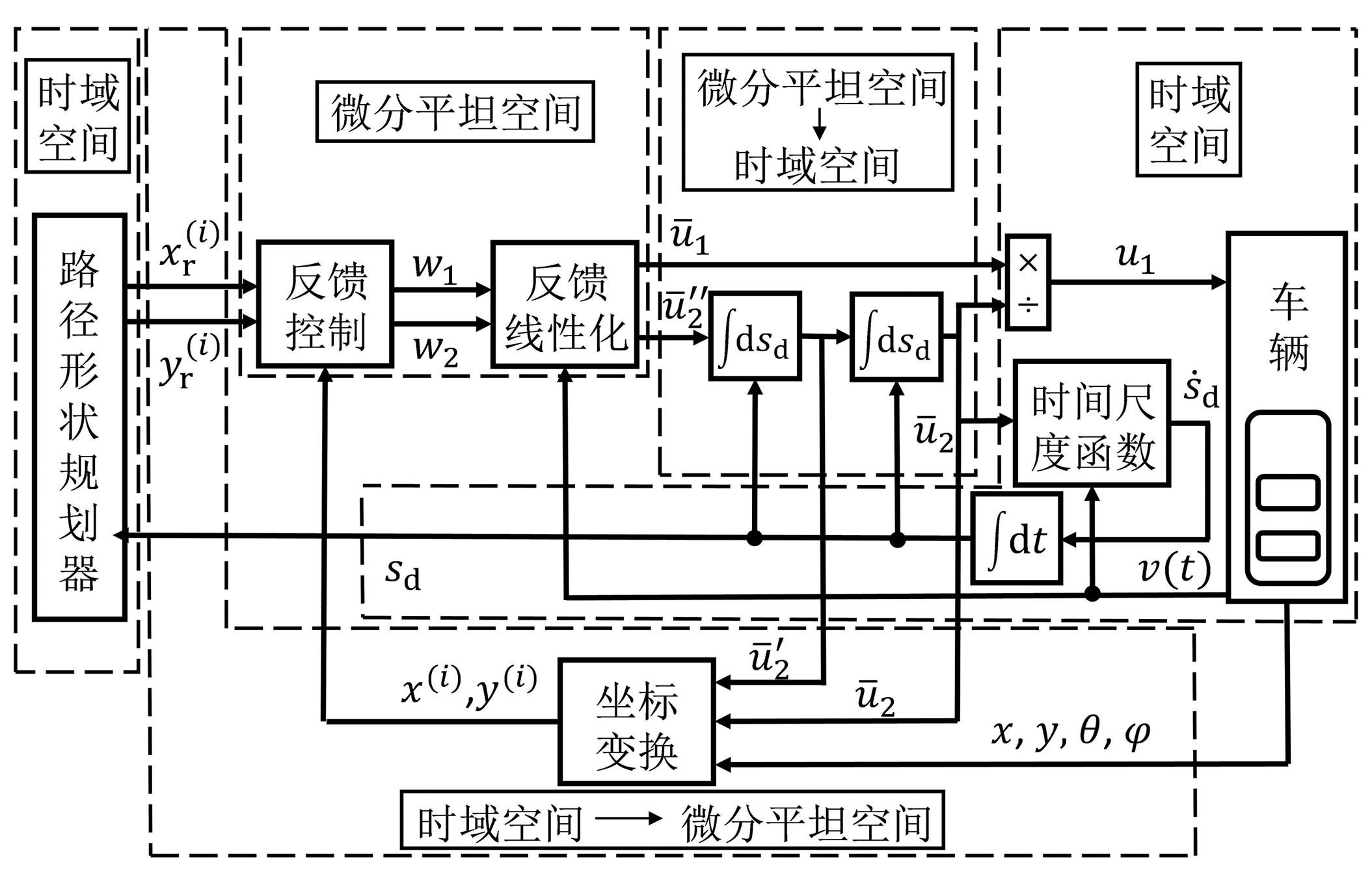
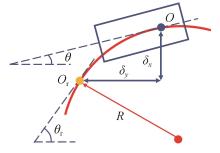
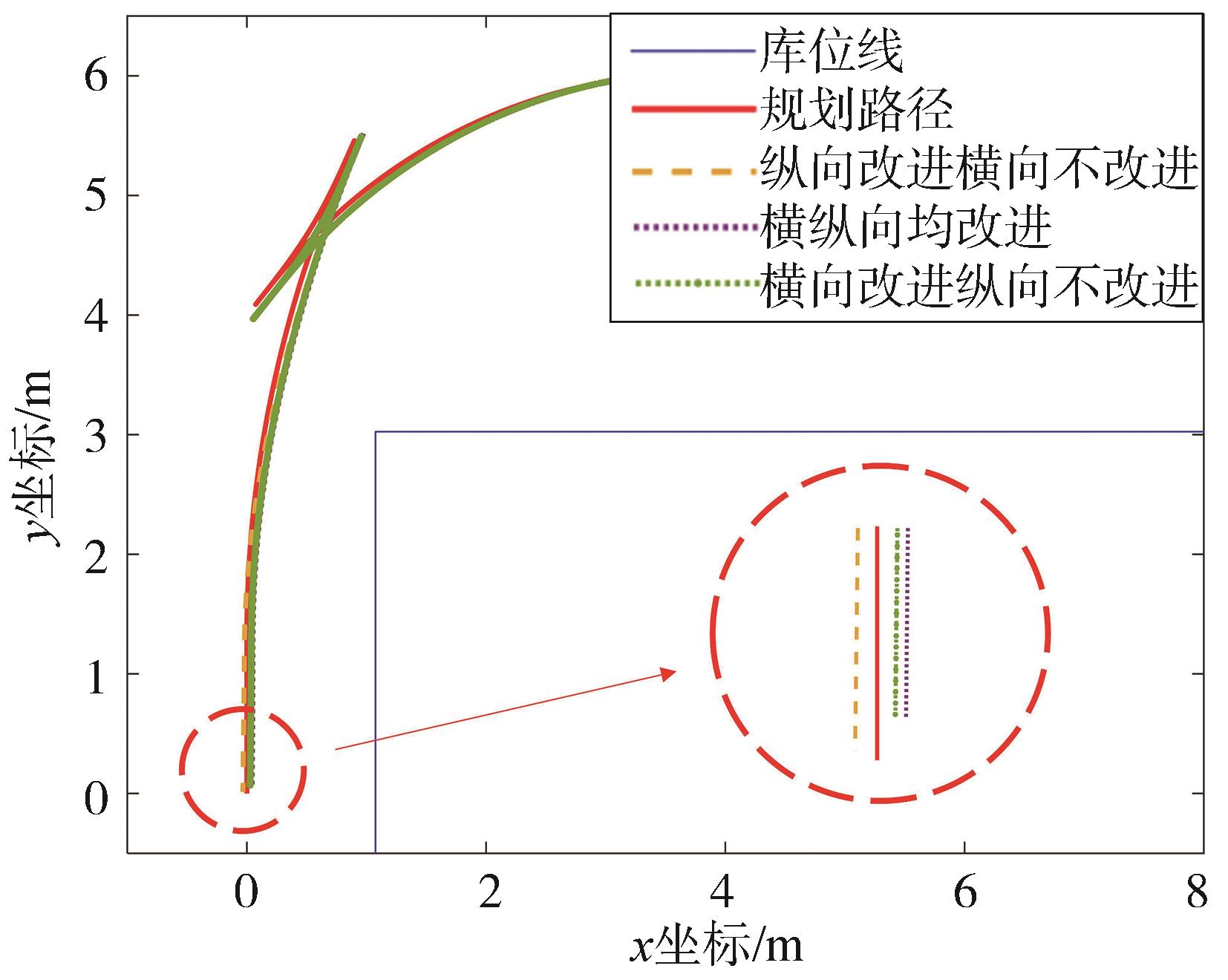
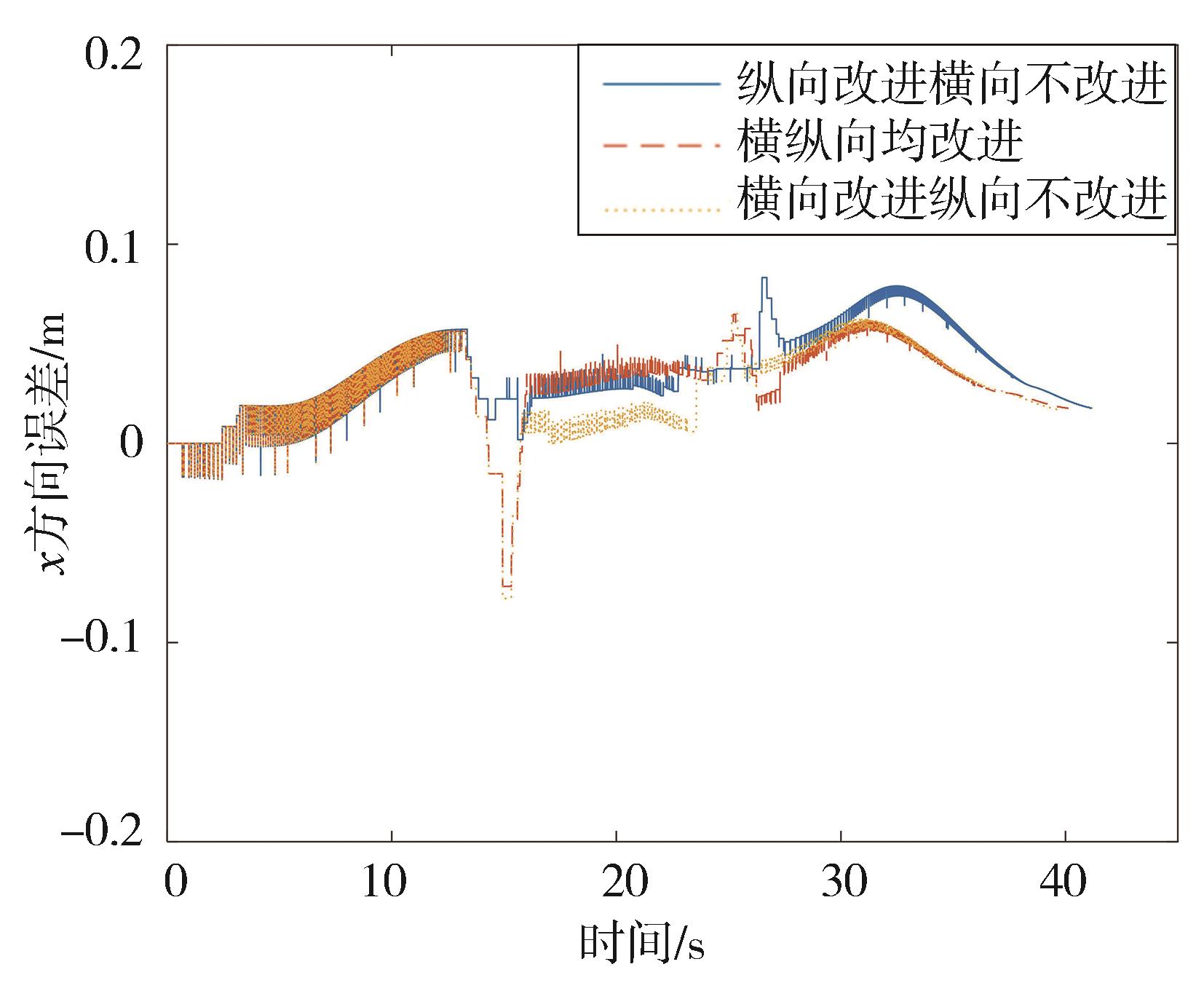
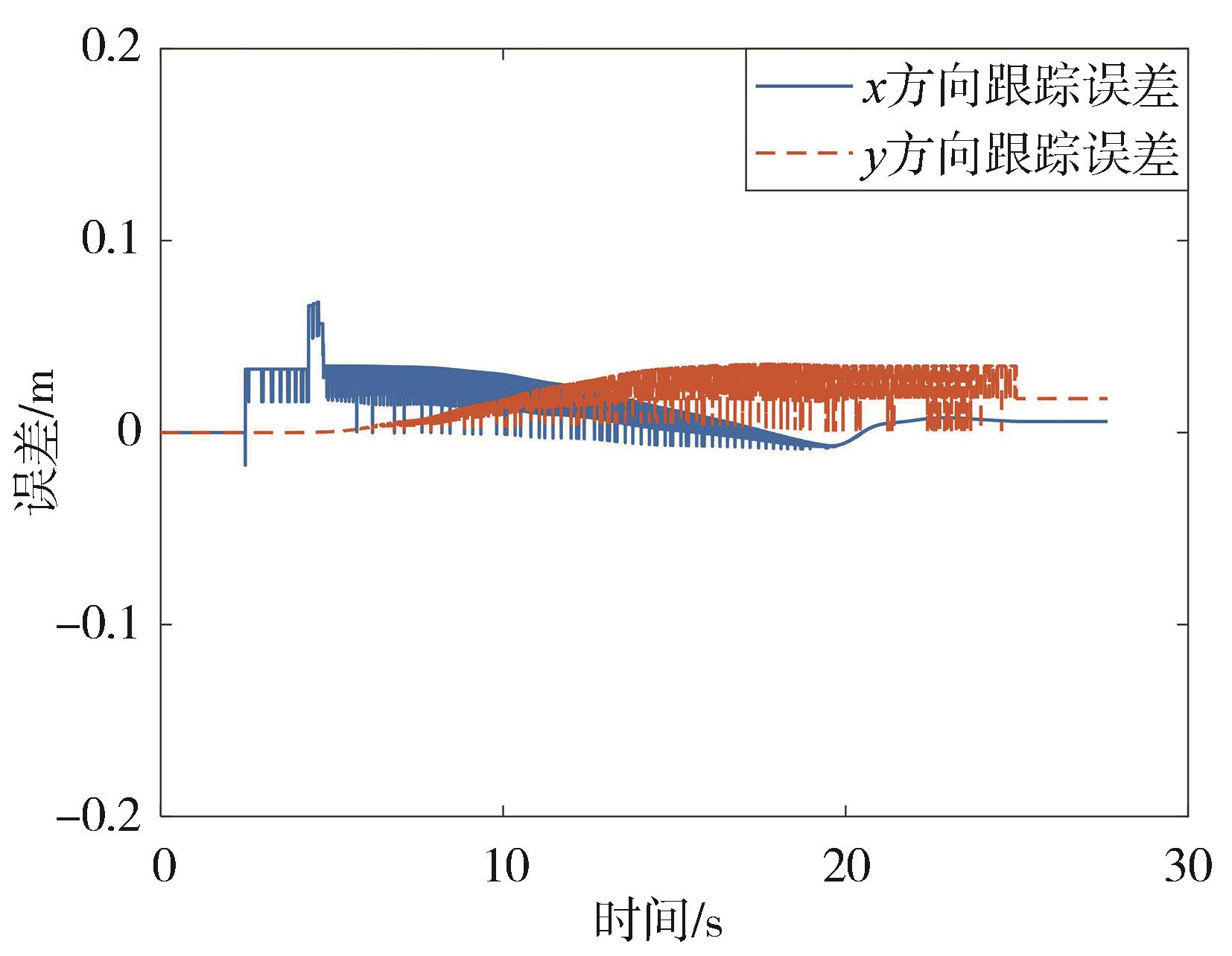
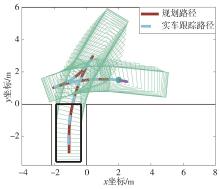
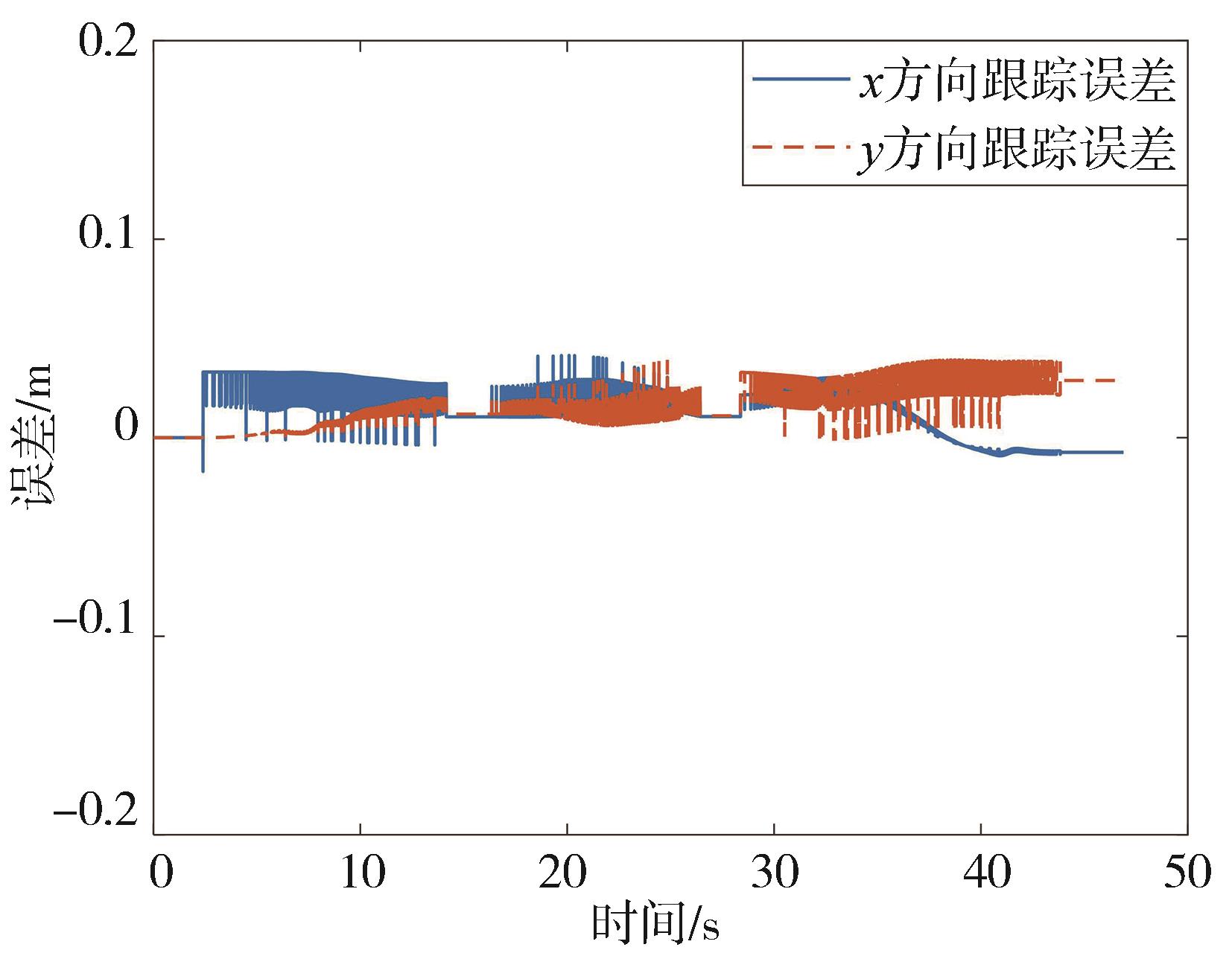
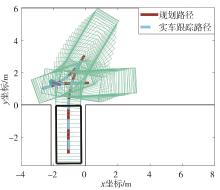
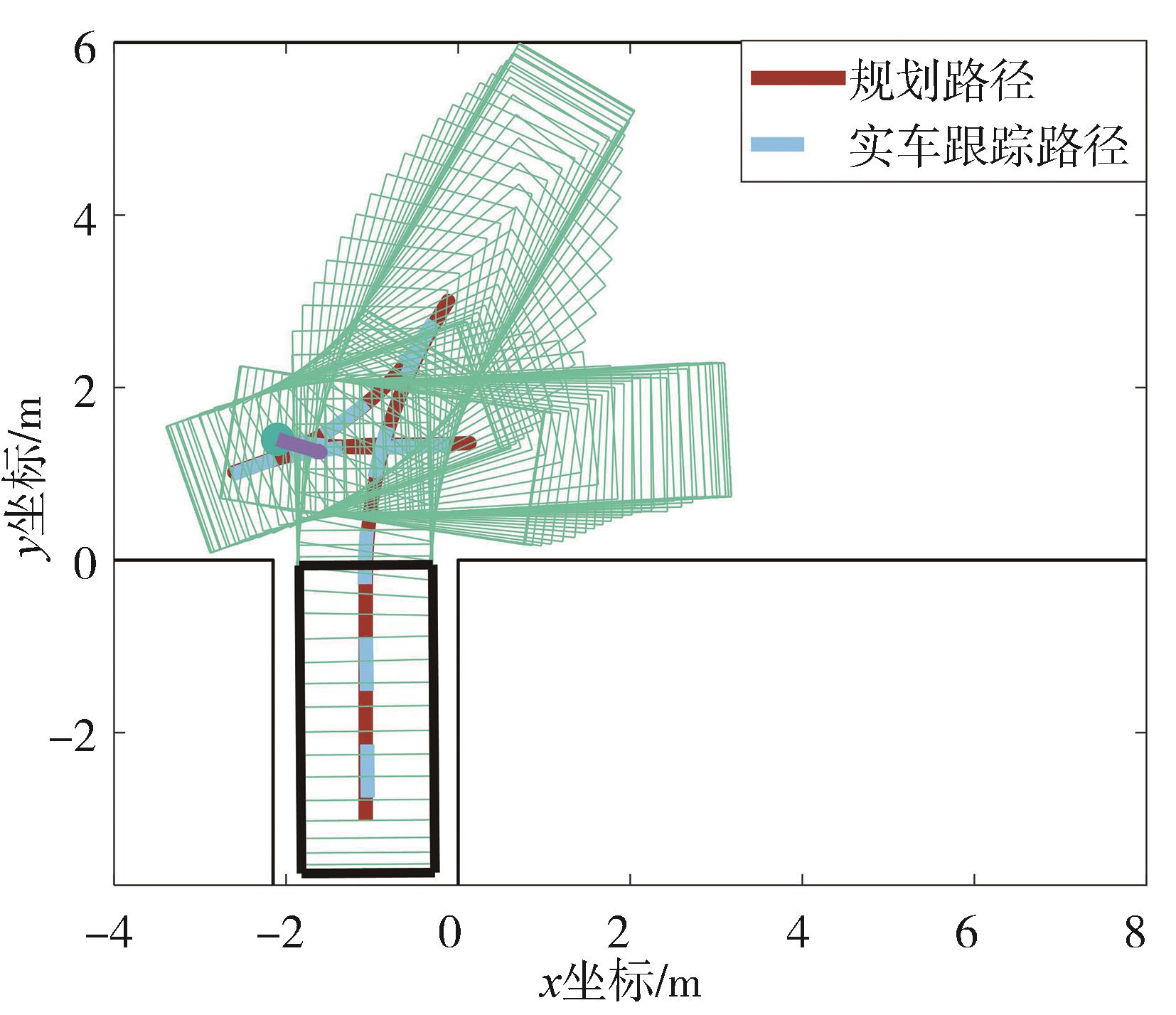
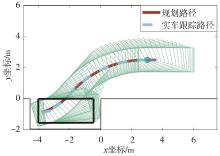
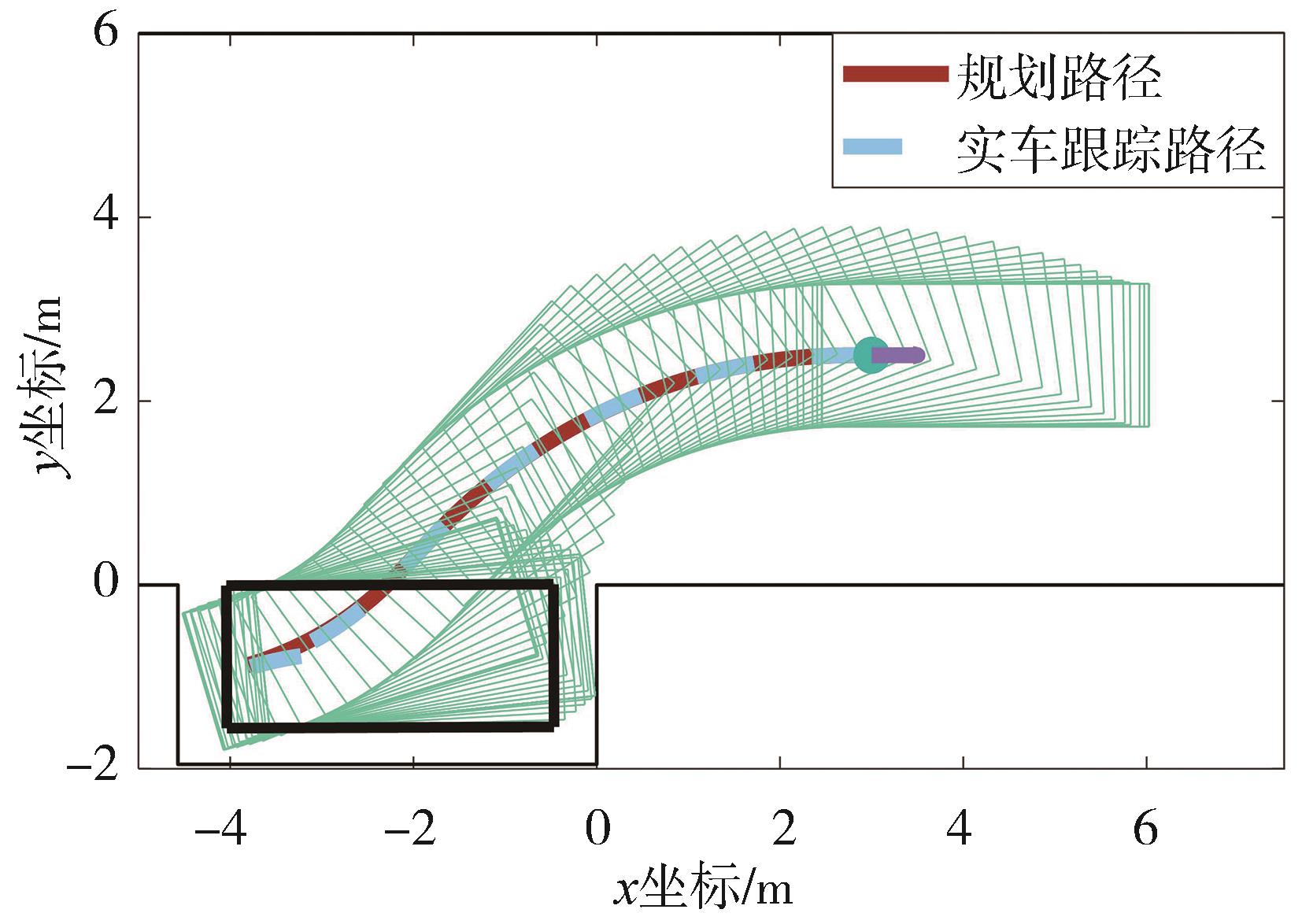
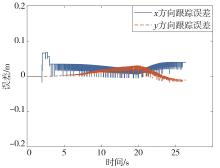
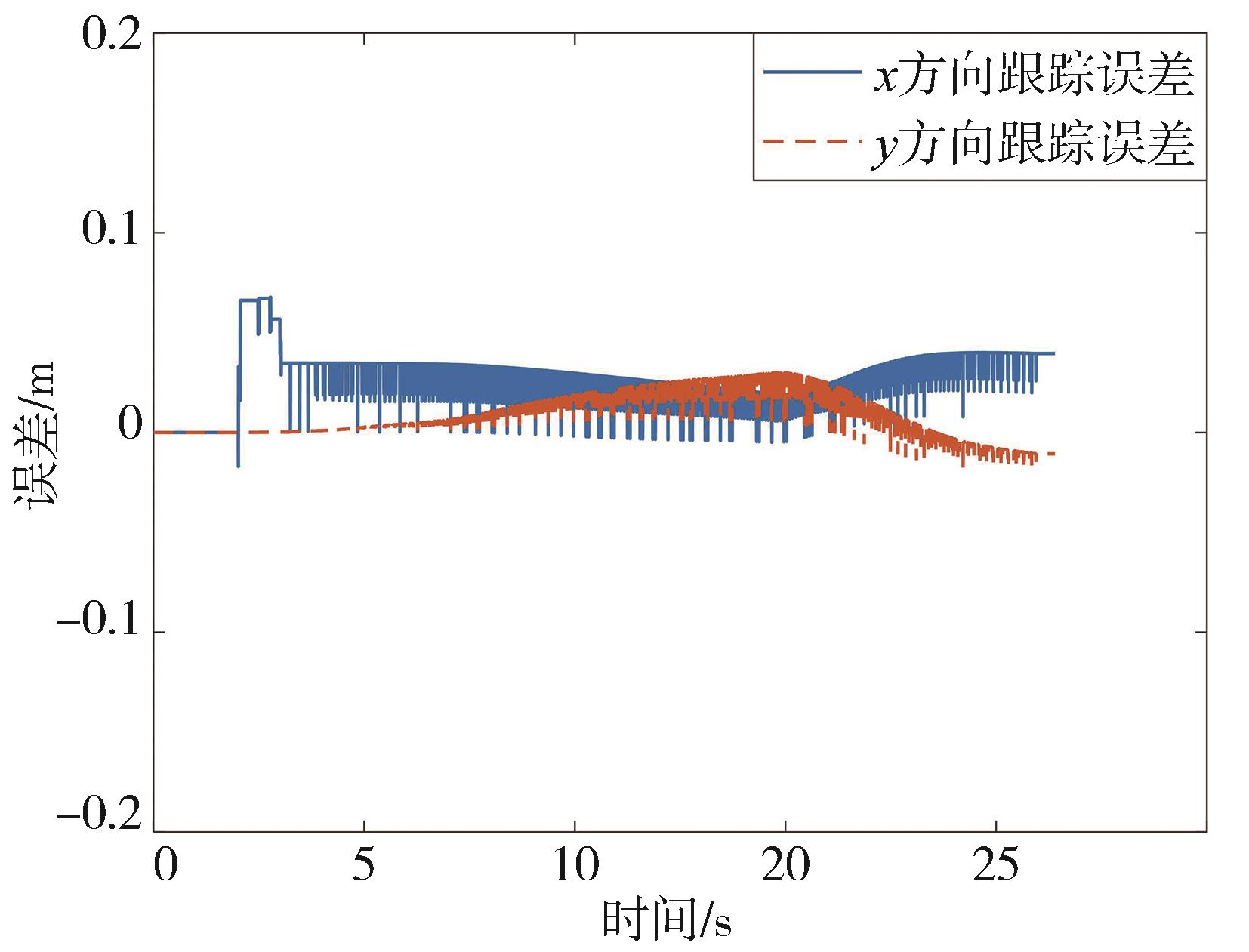
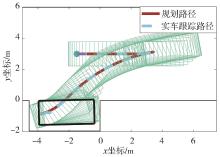
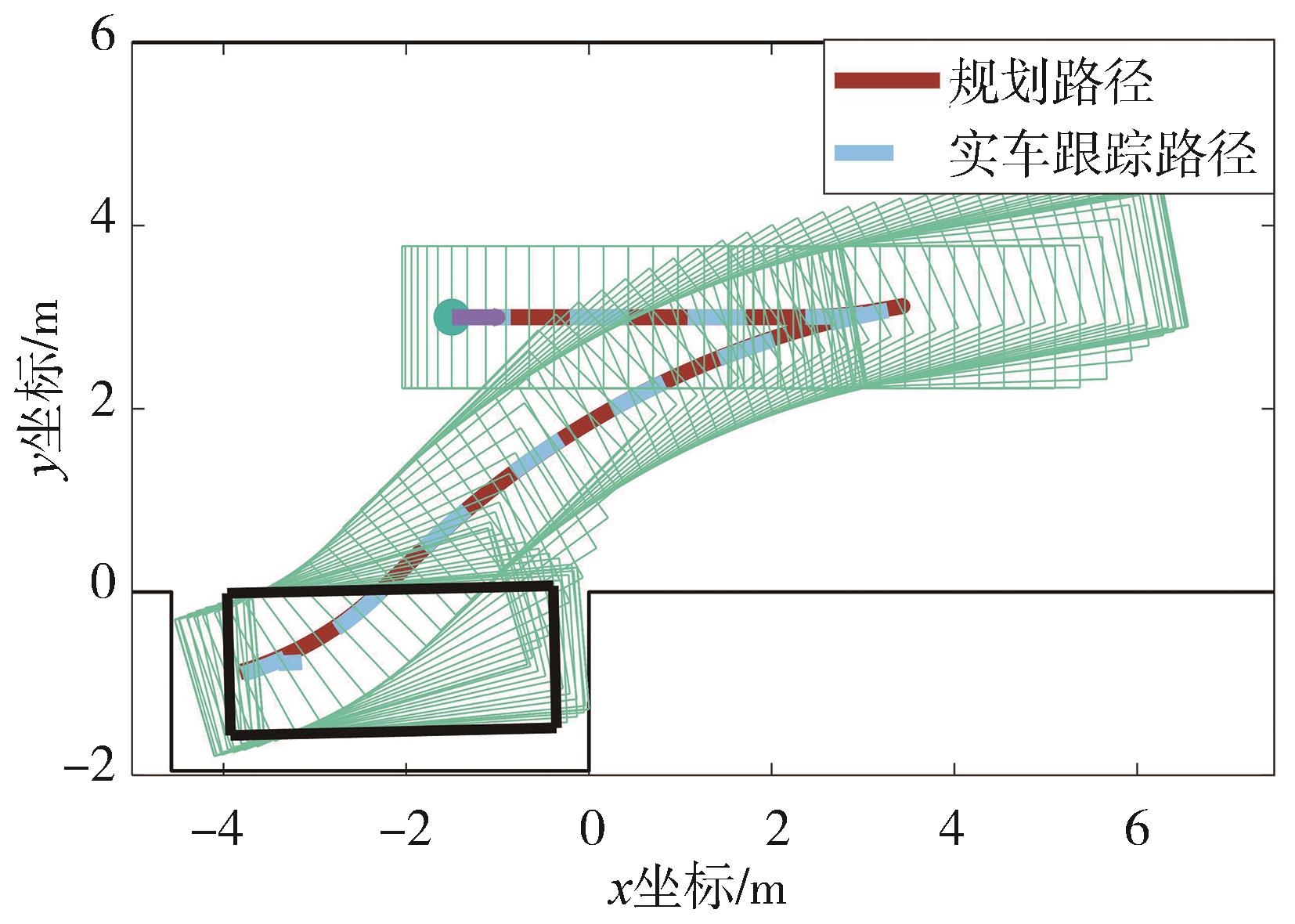
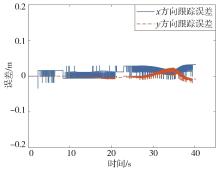
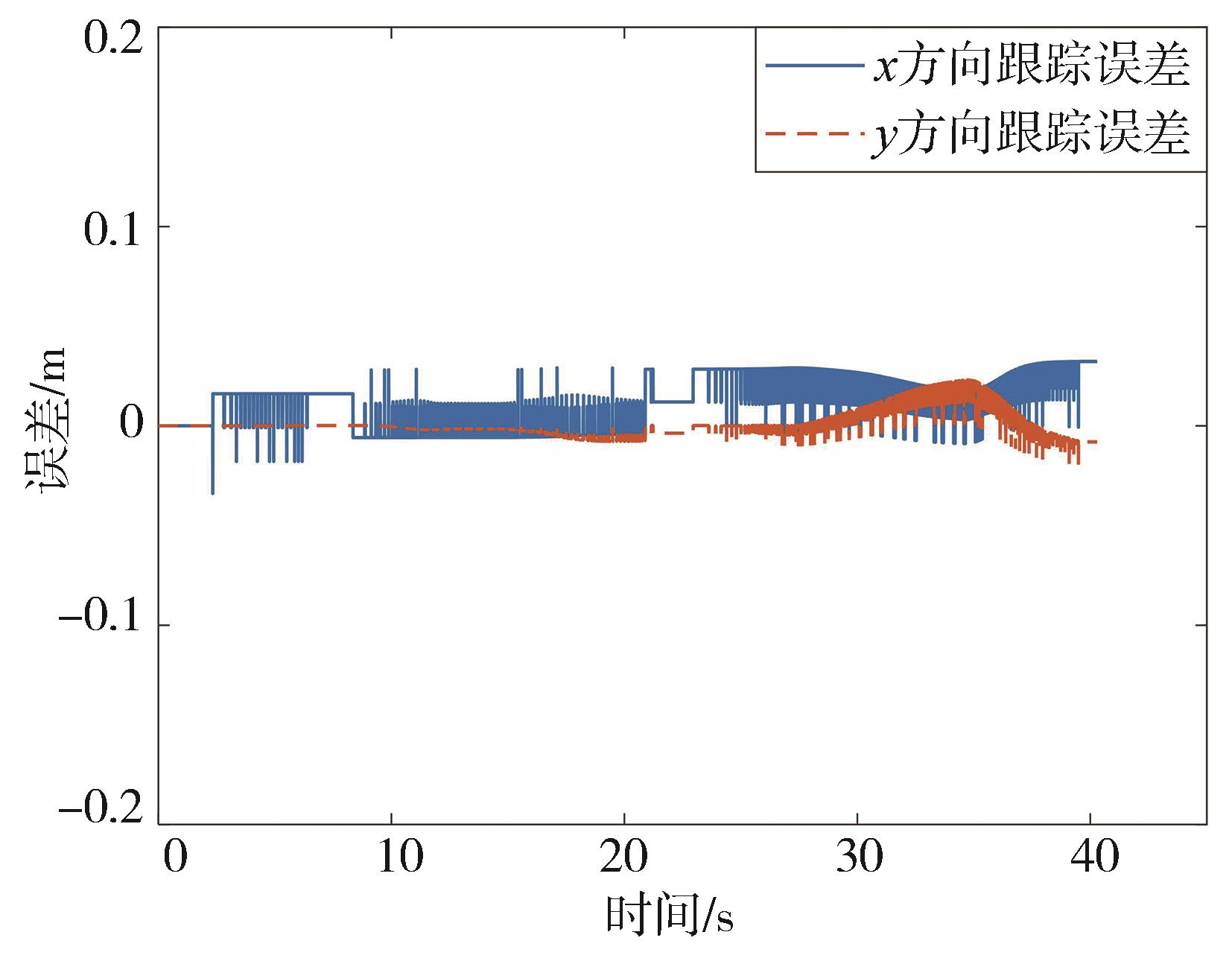
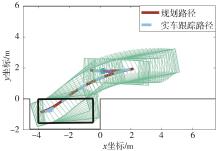
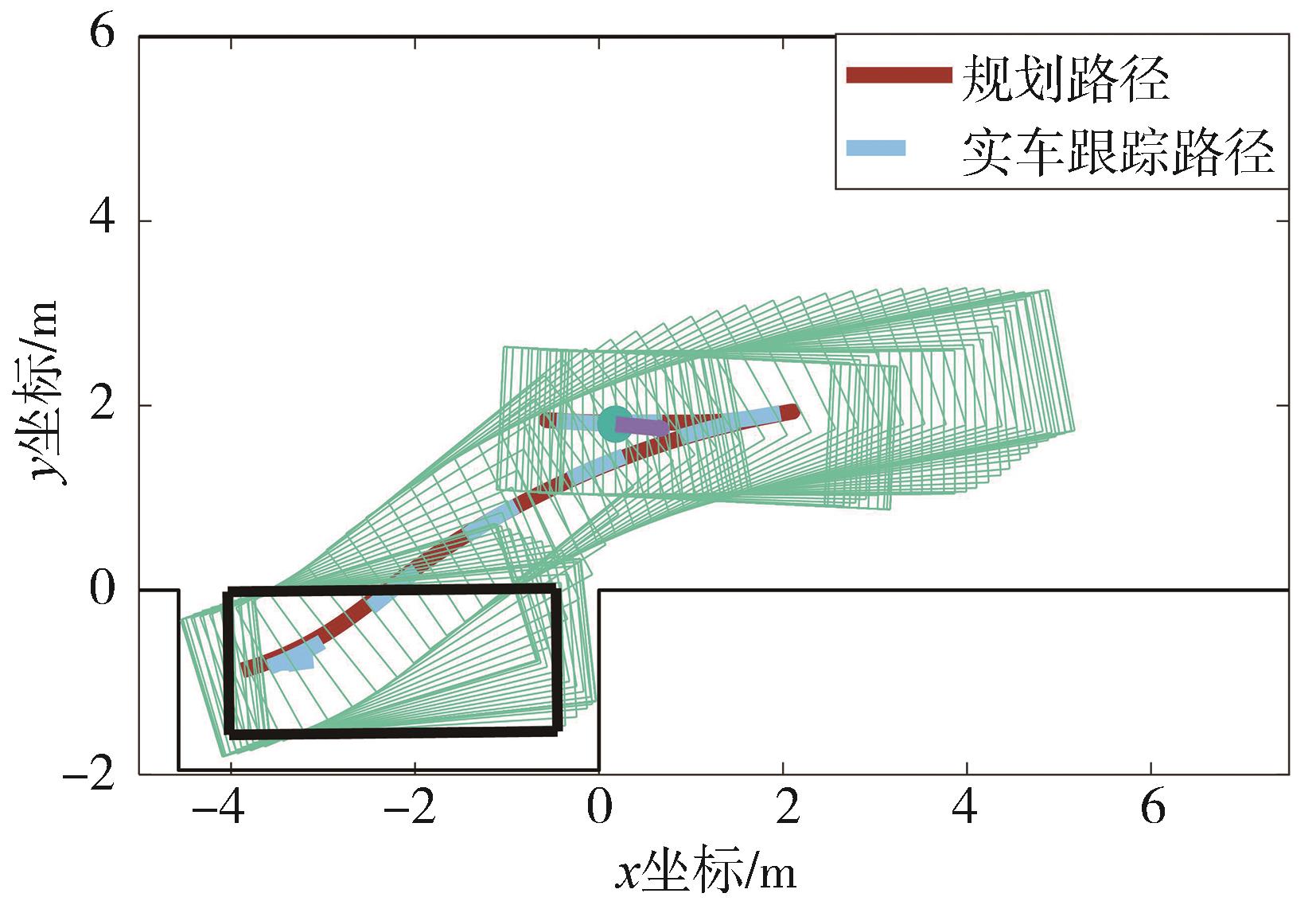
本文中基于微分平坦理论的泊车路径跟随方法,将车辆与路径参考点之间的误差进行横纵向解耦,并利用与横纵向误差相对应的控制器进行控制,使得车辆能够以更高精度跟随沿路径移动的参考点,最终完成对整个泊车路径更高精度的跟随。纵向控制上,提出有效距离积分方法,并设定纵向误差修正规则,从而最大程度确保参考点与车辆之间的误差为可受横向控制的横向误差;横向控制上,采用线性二次调节器(LQR),通过将路径曲率变化率与可以加速横向误差衰减的α因子建立联系,使得车辆在定曲率与变曲率路径处均能高精度跟随参考点。仿真对比结果与实车实验结果表明,改进后的横纵向路径跟随控制策略可以使全过程更高精度跟随参考点,最终完成整条路径的更高精度跟随。