汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1134-1144.doi: 10.19562/j.chinasae.qcgc.2023.07.004
所属专题: 智能网联汽车技术专题-规划&决策2023年
潘世举,李建市,李华,娄静涛( ),徐友春
),徐友春
收稿日期:2022-04-21
修回日期:2022-05-29
出版日期:2023-07-25
发布日期:2023-07-25
通讯作者:
娄静涛
E-mail:loujt_1984@126.com
基金资助:
Shiju Pan,Jianshi Li,Hua Li,Jingtao Lou(),Youchun Xu
Received:2022-04-21
Revised:2022-05-29
Online:2023-07-25
Published:2023-07-25
Contact:
Jingtao Lou
E-mail:loujt_1984@126.com
摘要:
为提高智能车在不同速度和载荷下的路径跟随精度和稳定性,提出一种基于反馈纯跟踪的智能车路径跟随方法。首先,基于车辆运动学模型和纯跟踪模型分析影响控制效果的因素;然后根据车辆速度和路径曲率动态调整前视距离,将横向偏差作为反馈变量对传统纯跟踪控制方法进行补偿;接着通过仿真试验选定控制参数,分析控制参数对路径跟随精度和车辆稳定性的影响;最后通过实车试验,验证该方法在实车环境中的控制性能。结果表明,该方法具有较高的路径跟随精度,在不同速度和载荷下保持良好的适应性和稳定性。
潘世举, 李建市, 李华, 娄静涛, 徐友春. 基于反馈纯跟踪的智能车路径跟随方法[J]. 汽车工程, 2023, 45(7): 1134-1144.
Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method[J]. Automotive Engineering, 2023, 45(7): 1134-1144.
图1
纯跟踪方法示意图"
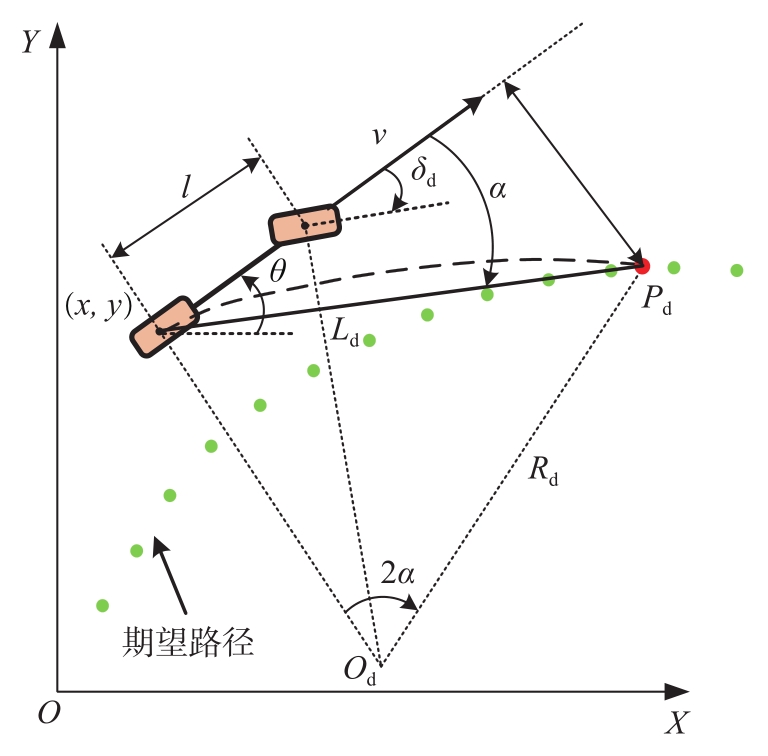

图2
前视距离的选定"

图3
反馈补偿转角计算方法示意图"
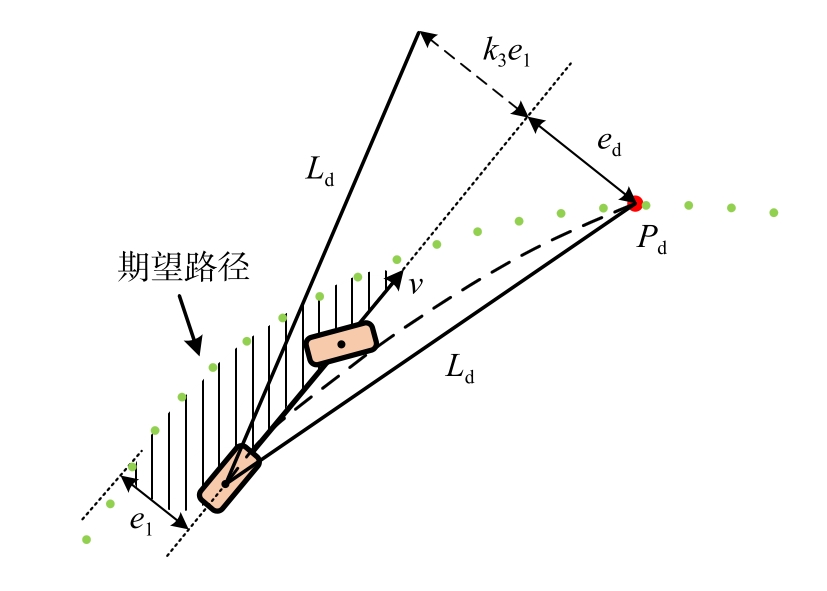

图4
数据交互和行驶路线"


图5
不同前视距离的试验结果"


图6
不同k1的试验结果"


图7
不同k2的试验结果"


图8
不同n的试验结果"


图9
固定速度的试验结果"
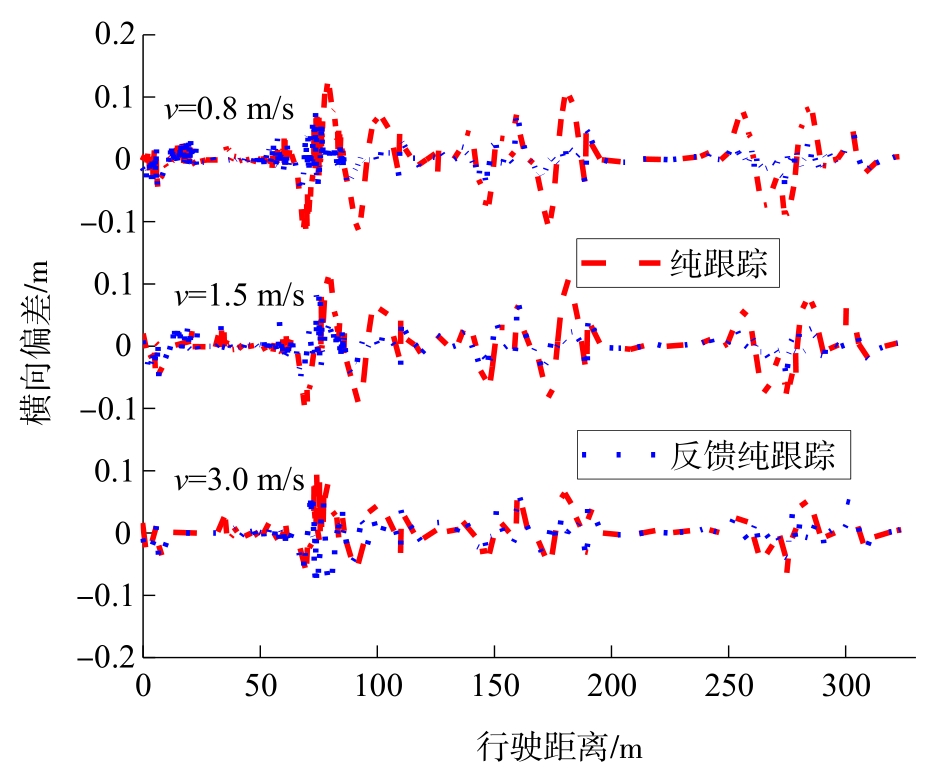

图10
变化速度的试验结果"
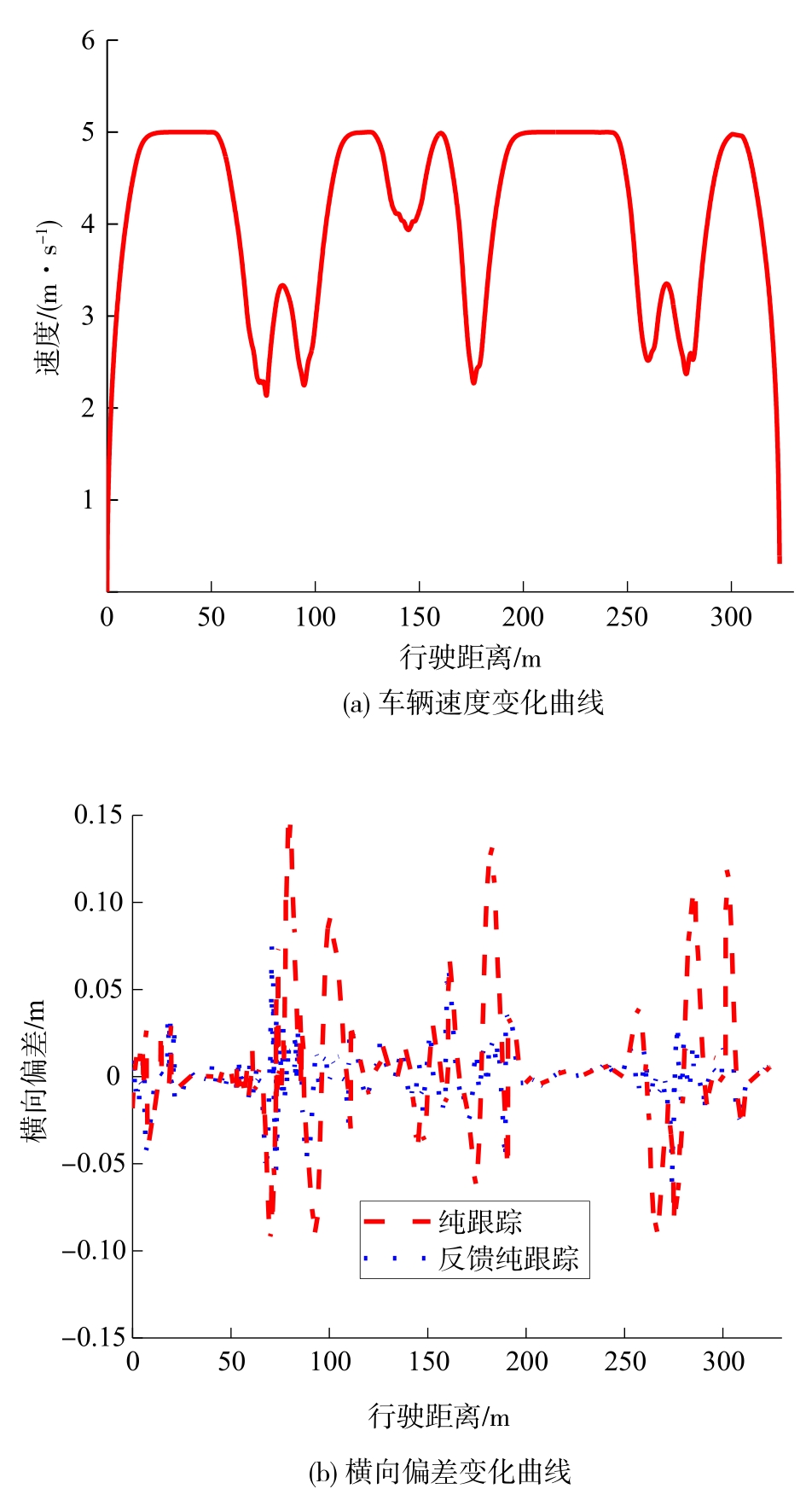

图11
试验平台和路径曲率"

图12
不同速度的试验结果"


图13
不同载荷的试验结果"

| 1 | 崔明阳, 黄荷叶, 许庆, 等. 智能网联汽车架构、功能与应用关键技术[J]. 清华大学学报(自然科学版), 2022, 62(3): 493-508. |
| CUI M Y, HUANG H Y, XU Q, et al. Survey of intelligent and connected vehicle technologies: architectures, functions and applications[J]. Journal of Tsinghua University(Science and Technology), 2022, 62(3): 493-508. | |
| 2 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| XIONG L, YANG X, ZHUO G R, et al. Review on motion control of autonomous vehicles[J]. Chinese Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| 3 | NI J, HU J, XIANG C. A review for design and dynamics control of unmanned ground vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(4): 1084-1100. |
| 4 | MONOT N, MOREAU X, BENINE-NETO A, et al. Automated vehicle lateral guidance using multi-PID steering control and look-ahead point reference[J]. International Journal of Vehicle Autonomous Systems, 2021, 16(1): 38-55. |
| 5 | 张杰, 袁东, 张朋, 等. 双侧电传动履带车辆模糊前馈-反馈转向控制[J]. 兵工学报, 2020, 41(8): 1688-1696. |
| ZHANG J, YUAN D, ZHANG P, et al. Steering control based on fuzzy feedforward and feedback for dual-motor electric drive tracked vehicle[J]. Acta Armamentarii, 2020, 41(8): 1688-1696. | |
| 6 | GRIGORESCU S, TRASNEA B, COCIAS T, et al. A survey of deep learning techniques for autonomous driving[J]. Journal of Field Robotics, 2020, 37(3): 362-386. |
| 7 | ZHOU W. Adaptive preview based control system for unmanned vehicle path tracking[J]. International Journal of Vehicle Structures & Systems, 2021, 13(4): 398-404. |
| 8 | CHEN L, QIN Z B, KONG W W, et al. Lateral control using LQR for intelligent vehicles based on the optimal front-tire lateral force[J]. Journal of Tsinghua University(Science and Technology), 2021, 61(9): 906-912. |
| 9 | 李骏, 万文星, 郝三强, 等. 复杂路况下无人驾驶路径跟踪模型预测控制研究[J]. 汽车工程, 2022, 44(5): 664-674. |
| LI J, WANG W X, HAO S Q, et al. Research on model predictive control of autonomous vehicle path tracking under complex road condition[J]. Automotive Engineering, 2022, 44(5): 664-674. | |
| 10 | 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京:北京理工大学出版社,2014. |
| GONG J W, JIANG Y, XU W. Model predictive control of self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press, 2014. | |
| 11 | ZHANG H, ZHANG H, WANG Z, et al. Adaptive event based predictive lateral following control for unmanned ground vehicle system[J]. International Journal of Robust and Nonlinear Control, 2021, 31(10): 4744-4763. |
| 12 | 姚文龙, 庞震, 池荣虎, 等. 环卫车辆轨迹跟踪系统的无模型自适应迭代学习控制[J]. 控制理论与应用, 2022, 39(1): 101-108. |
| YAO W L, PANG Z, CHI R H, et al. Track tracking control of sanitation vehicle based on model-free adaptive iterative learning control[J]. Control Theory & Applications, 2022, 39(1): 101-108. | |
| 13 | 梁宝钰, 汪怡平, 刘珣, 等. 基于滑模理论的高速车辆侧风稳定性控制研究[J]. 汽车工程, 2022, 44(1): 123-130. |
| LIANG B Y, WANG Y P, LIU X, et al. Study on crosswind stability control of high-speed vehicle based on sliding mode theory[J]. Automotive Engineering, 2022, 44(1): 123-130. | |
| 14 | KHOYGANI M R, GHASEMI R, GHAYOOMI P. Robust observer-based control of nonlinear multi-omnidirectional wheeled robot systems via high order sliding-mode consensus protocol[J]. International Journal of Automation and Computing, 2021, 18(5): 787-801. |
| 15 | 李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137. |
| LI R, XIANG C L, WANG C, et al. Robust adaptive trajectory tracking control approach for autonomous tracked vehicles[J]. Acta Armamentarii, 2021, 42(6): 1128-1137. | |
| 16 | NARVESEN A K. Robust control of skid steered robotic vehicles on high friction surfaces[D]. North Dakota State University, 2015. |
| 17 | PARK M, LEE S, HAN W. Development of steering control system for autonomous vehicle using geometry-based path tracking algorithm[J]. Etri Journal, 2015, 37(3): 617-625. |
| 18 | AHN J, SHIN S, KIM M, et al. Accurate path tracking by adjusting look-ahead point in pure pursuit method[J]. International Journal of Automotive Technology, 2021, 22(1): 119-129. |
| 19 | 张华强, 王国栋, 吕云飞, 等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报, 2020, 51(9): 18-25. |
| ZHANG H Q, WANG G D, LÜ Y F, et al. Agricultural machinery automatic navigation control system based on improved pure tracking model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 18-25. | |
| 20 | SHAN Y, ZHENG B, CHEN L, et al. A reinforcement learning-based adaptive path tracking approach for autonomous driving[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10581-10595. |
| 21 | CHEN I M, CHAN C Y. Deep reinforcement learning based path tracking controller for autonomous vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2-3): 541-551. |
| 22 | 李革, 王宇, 郭刘粉, 等. 插秧机导航路径跟踪改进纯追踪算法[J]. 农业机械学报, 2018, 49(5): 21-26. |
| LI G, WANG Y, GUO L F, et al. Improved pure pursuit algorithm for rice transplanter path tracking[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 21-26. |
| [1] | 胡林,李根,王方,林淼,巫宁. 基于CIDAS事故数据的路口乘用车-两轮车测试场景研究[J]. 汽车工程, 2023, 45(8): 1417-1427. |
| [2] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [3] | 李子先,潘世举,朱愿,何滨兵,徐友春. 基于状态反馈和预瞄前馈的智能车半主动悬架控制[J]. 汽车工程, 2023, 45(5): 735-745. |
| [4] | 吕彦直,魏超,何元浩. 基于GCN和CIL的端到端自动驾驶换道方法[J]. 汽车工程, 2023, 45(12): 2310-2317. |
| [5] | 任明辉,梁军,陈龙,张春,王云. 基于改进冲突搜索的智能车库多AGV路径规划[J]. 汽车工程, 2023, 45(10): 1933-1943. |
| [6] | 潘世举,李永乐,李子先,何滨兵,朱愿,徐友春. 基于改进纯跟踪的智能车路径跟随方法[J]. 汽车工程, 2023, 45(1): 1-8. |
| [7] | 邓泽武,胡钊政,周哲,刘裕林,彭超. 融合激光雷达与双层地图模型的智能车定位[J]. 汽车工程, 2022, 44(7): 1018-1026. |
| [8] | 张书恺,陈慧,刘美岑. 全自动泊车系统路径跟随控制策略[J]. 汽车工程, 2022, 44(7): 1027-1039. |
| [9] | 周哲,胡钊政,王志强,肖汉彪. 基于2阶HMM的智能车视觉地图定位方法[J]. 汽车工程, 2022, 44(2): 190-198. |
| [10] | 关龙新,顾祖飞,张超,王爱春,彭晨若,江会华,吴晓建. 考虑系统复杂扰动的智能车模型预测路径跟踪控制[J]. 汽车工程, 2022, 44(12): 1844-1855. |
| [11] | 黄圣杰,胡满江,周云水,殷周平,秦晓辉,边有钢,贾倩倩. 动态场景下基于语义分割与运动一致性约束的车辆视觉SLAM[J]. 汽车工程, 2022, 44(10): 1503-1510. |
| [12] | 梁军,朱方博,蔡英凤,陈小波,陈龙. 面向复杂曲率变化的智能车路径跟踪控制[J]. 汽车工程, 2021, 43(12): 1771-1779. |
| [13] | 陈吉清,翁楚滨,兰凤崇. 智能车辆换道潜在冲突分析与风险量化方法[J]. 汽车工程, 2021, 43(11): 1565-1576. |
| [14] | 章军辉,付宗杰,郭晓满,李庆,陈大鹏,赵野. 基于HS⁃FCM模糊聚类的快速多目标车辆跟踪算法[J]. 汽车工程, 2021, 43(10): 1419-1426. |
| [15] | 宋晓琳,盛鑫,曹昊天,李明俊,易滨林,黄智. 基于模仿学习和强化学习的智能车辆换道行为决策[J]. 汽车工程, 2021, 43(1): 59-67. |
|