汽车工程 ›› 2021, Vol. 43 ›› Issue (11): 1565-1576.doi: 10.19562/j.chinasae.qcgc.2021.11.001
• • 下一篇
陈吉清,翁楚滨,兰凤崇( )
)
收稿日期:2021-06-29
修回日期:2021-08-09
出版日期:2021-11-25
发布日期:2021-11-22
通讯作者:
兰凤崇
E-mail:fclan@scut.edu.cn
基金资助:
Jiqing Chen,Chubin Weng,Fengchong Lan()
Received:2021-06-29
Revised:2021-08-09
Online:2021-11-25
Published:2021-11-22
Contact:
Fengchong Lan
E-mail:fclan@scut.edu.cn
摘要:
在缺乏有效的真实换道事故数据的情况下,基于交通冲突理论,分析车辆在换道过程不同阶段与周围车辆的潜在冲突形式。通过微观冲突风险指标推导、宏观换道风险特征提取和系统性换道风险分析,建立同时考虑潜在碰撞可能性与严重程度的换道风险综合量化方法。利用自然驾驶轨迹数据集,对风险综合量化方法进行应用试验分析。结果表明,所提出的量化方法能客观合理地反映不同类型、不同位置的换道风险特征,为智能车辆安全换道决策与规划提供了一种新思路。
陈吉清,翁楚滨,兰凤崇. 智能车辆换道潜在冲突分析与风险量化方法[J]. 汽车工程, 2021, 43(11): 1565-1576.
Jiqing Chen,Chubin Weng,Fengchong Lan. Potential Conflict Analysis and Risk Quantification Method of Intelligent Vehicle Lane Change[J]. Automotive Engineering, 2021, 43(11): 1565-1576.
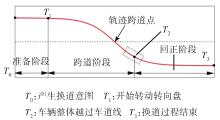
图1
换道阶段划分"
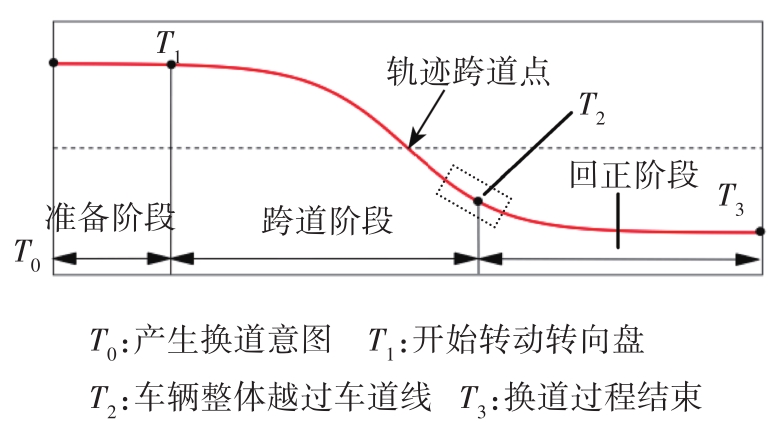

图2
换道准备阶段潜在碰撞形式"
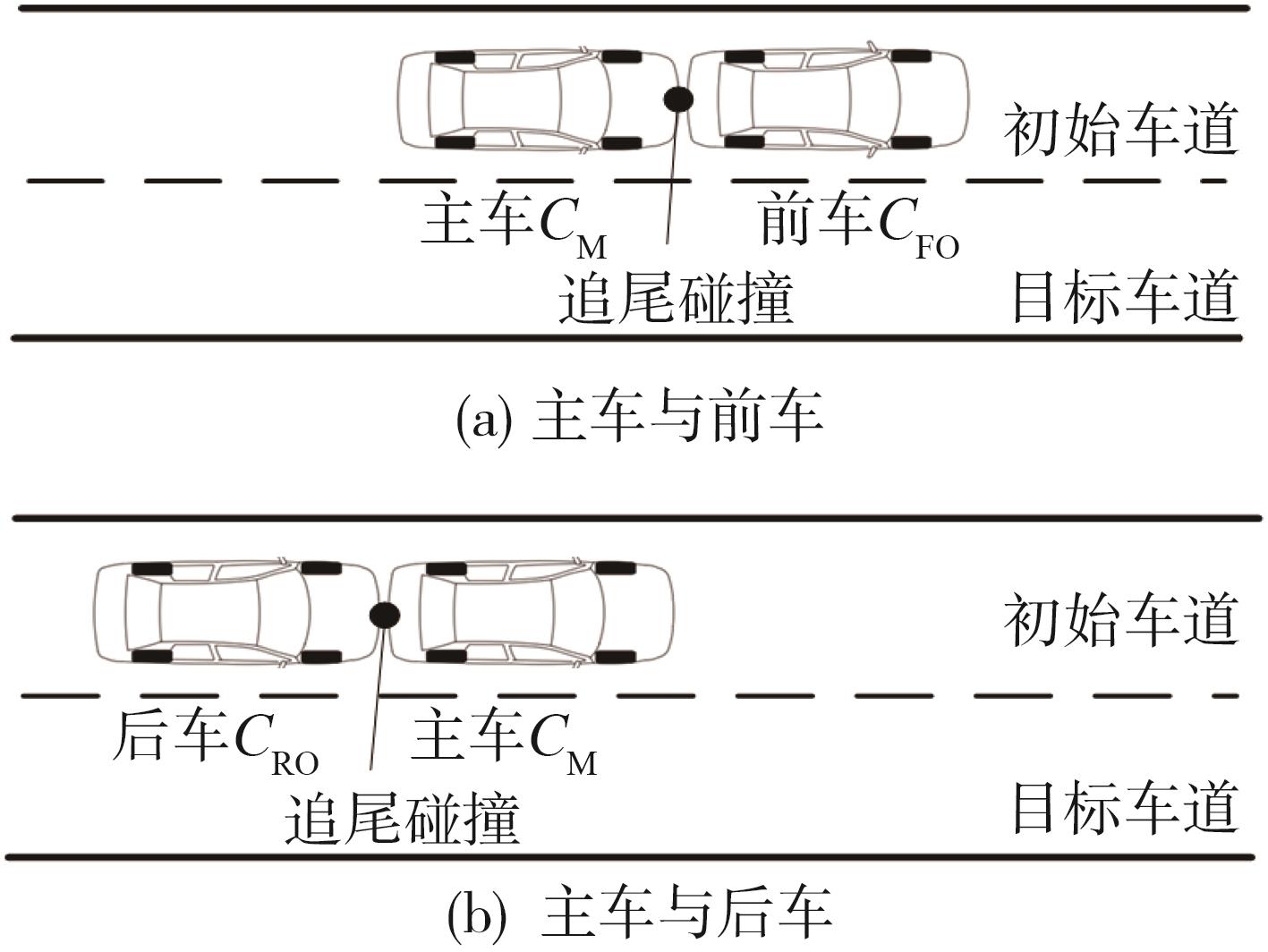

图3
跨道阶段潜在碰撞形式"
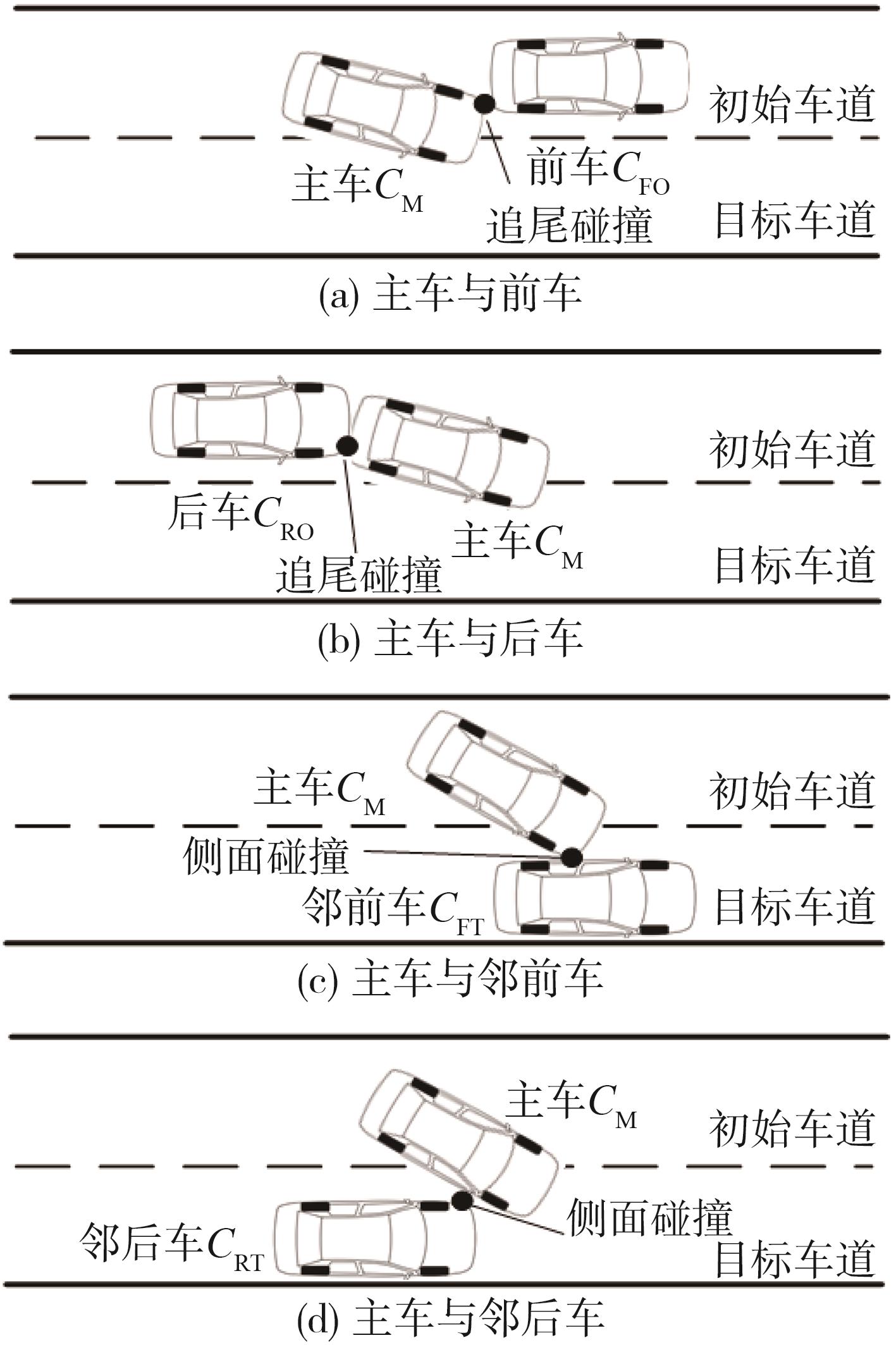
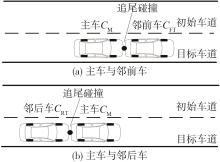
图4
回正阶段潜在碰撞形式"

表1
换道各阶段旁车与主车潜在冲突形式"
| 旁车 | 潜在冲突 | ||
|---|---|---|---|
| 准备阶段 | 跨道阶段 | 回正阶段 | |
| 前车CFO | 追尾碰撞 | 追尾碰撞 | 无 |
| 后车CRO | 追尾碰撞 | 追尾碰撞 | 无 |
| 邻前车CFT | 无 | 侧面碰撞 | 追尾碰撞 |
| 邻后车CRT | 无 | 侧面碰撞 | 追尾碰撞 |

图5
5车换道场景主车与周围车辆的定义"
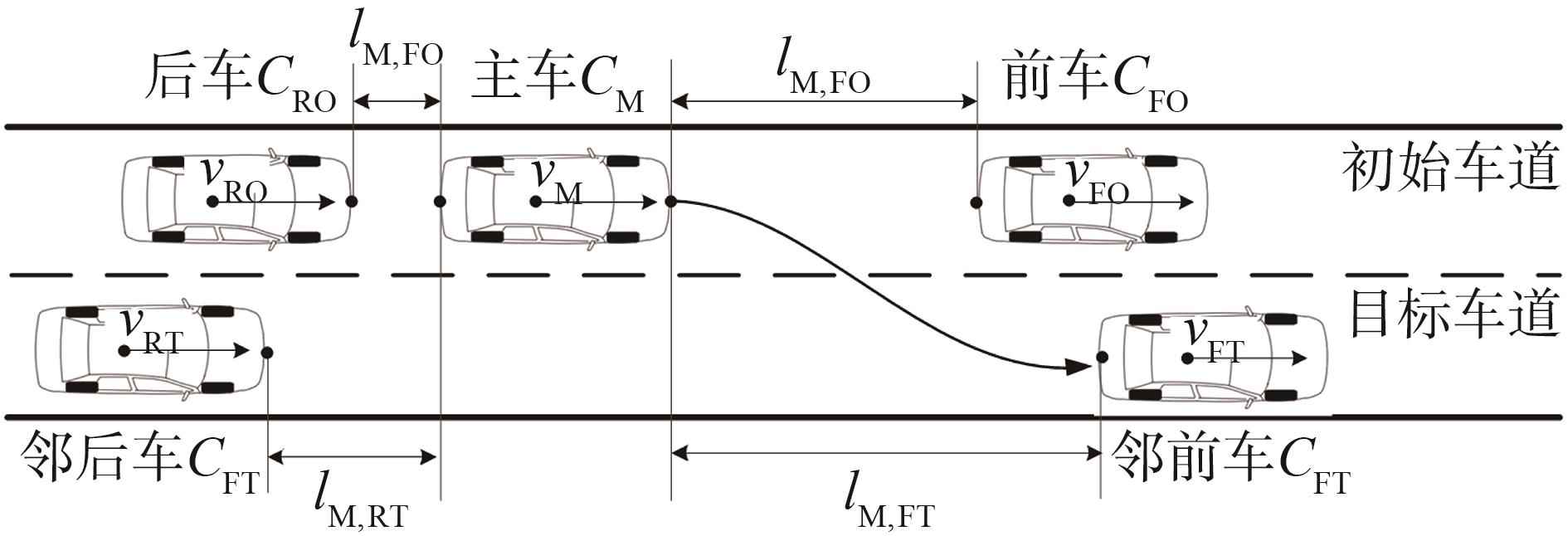

图6
追尾碰撞速度方向变化示意图"
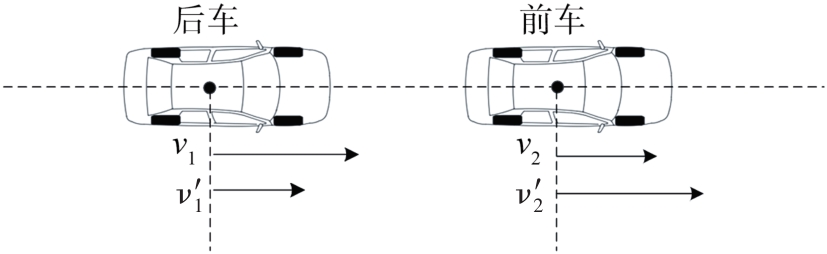

图7
侧面向心斜碰撞运动分解示意图"

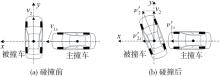
图8
侧面向心正碰撞前后瞬间两车的速度变化示意图"
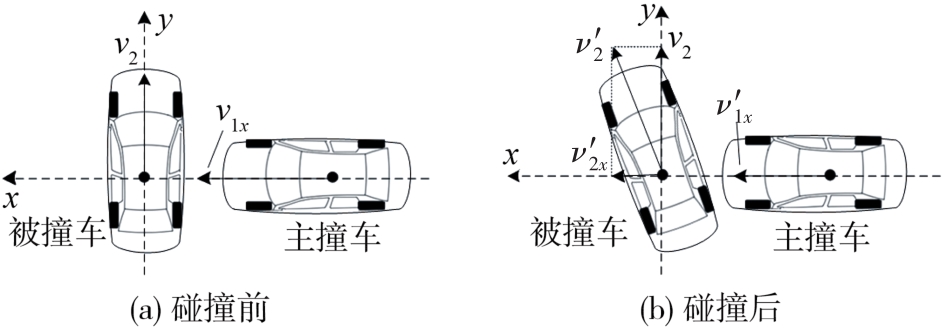
表2
不同百分位数对应的映射值"
| 百分位 | LEImax | RSL | y |
|---|---|---|---|
| 0 | L0 | 0 | 0 |
| 10 | L10 | 0.1 | 0.11 |
| 20 | L20 | 0.2 | 0.22 |
| 30 | L30 | 0.3 | 0.36 |
| 40 | L40 | 0.4 | 0.51 |
| 50 | L50 | 0.5 | 0.69 |
| 60 | L60 | 0.6 | 0.92 |
| 70 | L70 | 0.7 | 1.20 |
| 80 | L80 | 0.8 | 1.61 |
| 90 | L90 | 0.9 | 2.30 |
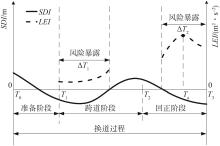
图9
某次换道过程CRT与CM的SDI与LEI计算结果"

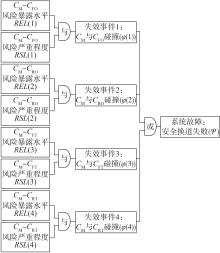
图10
换道系统故障树推理过程"

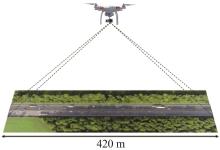
图11
HighD数据记录场景"
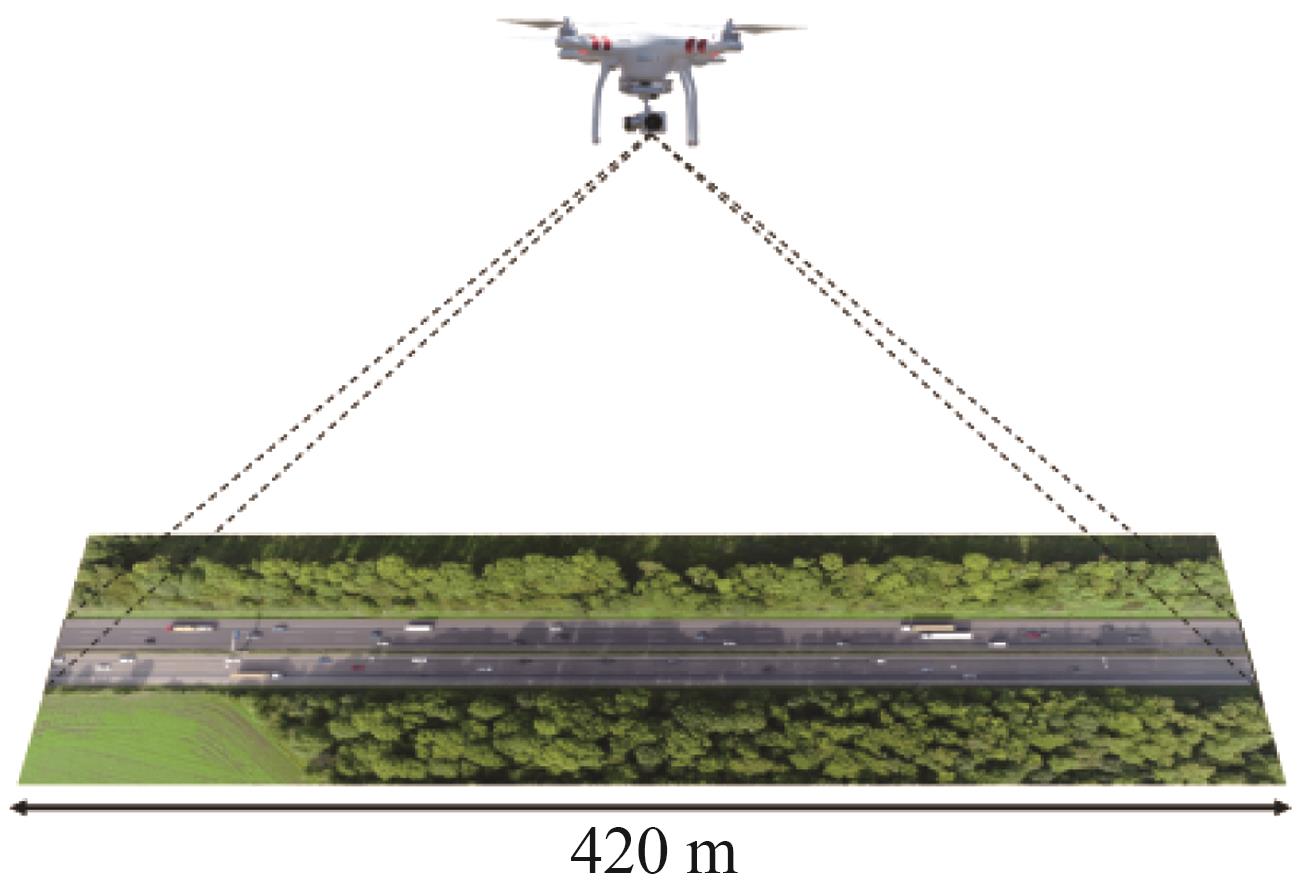

图12
HighD数据坐标定义"
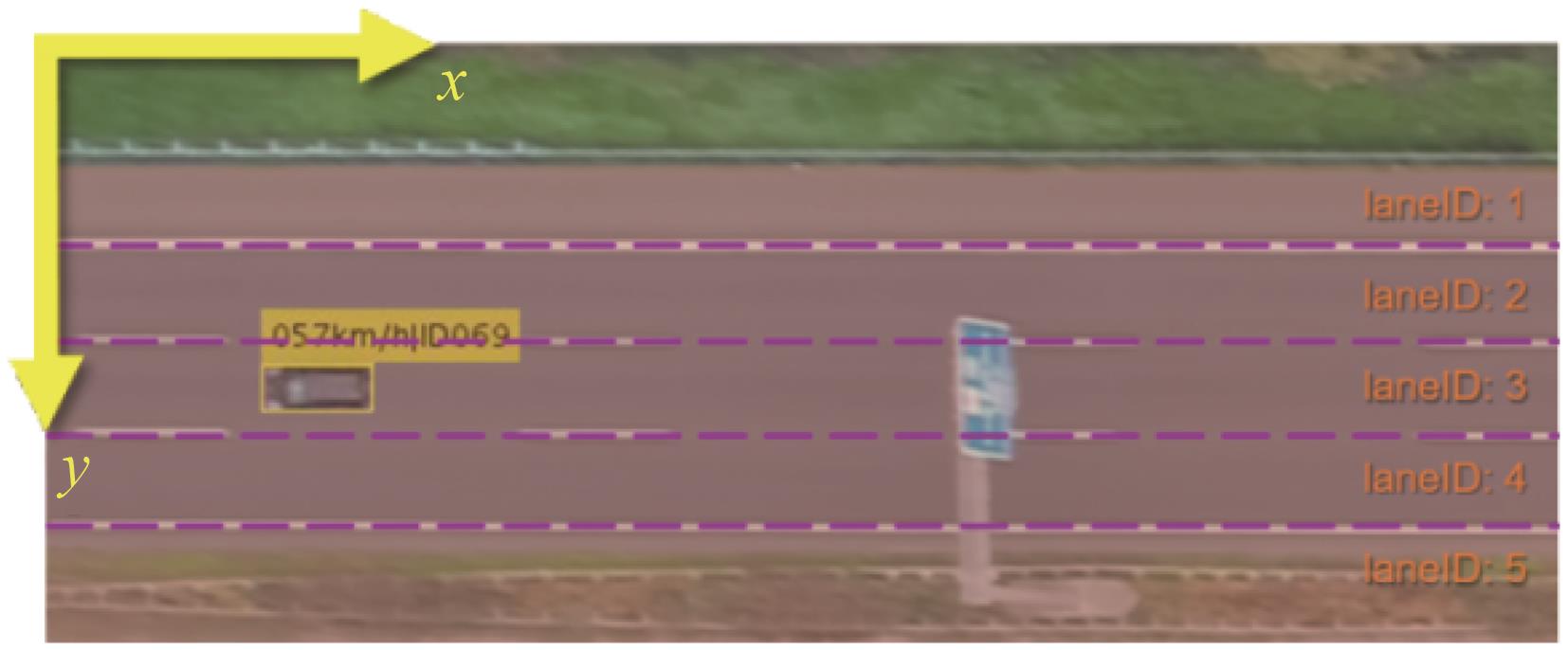
表3
车辆参数"
| 参数 | 高尔夫轿车 | 奔驰重型载货车 |
|---|---|---|
| 长/m | 4.578 | 9.750 |
| 宽/m | 1.799 | 2.507 |
| 满载质量/kg | 1 781 | 26 000 |
| 质量尺寸比/(kg·m-2) | 216.2 | 1 064 |

图13
HighD数据集换道轨迹LEImax统计分布图"
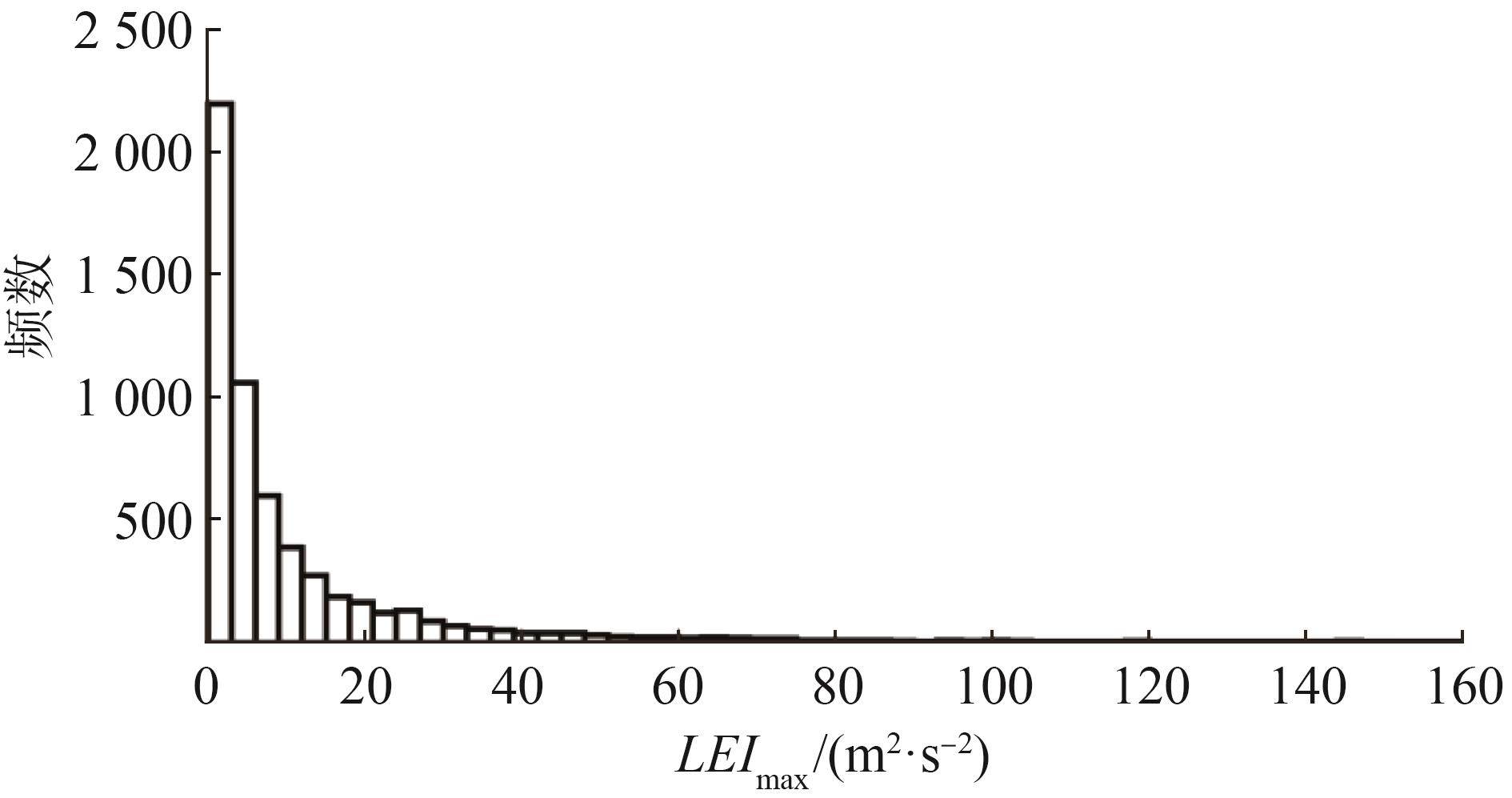
表4
HighD数据集不同百分位的映射对应结果"
| 百分位 | LEImax | RSL | y |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 10 | 0.74 | 0.1 | 0.11 |
| 20 | 1.38 | 0.2 | 0.22 |
| 30 | 2.14 | 0.3 | 0.36 |
| 40 | 3.13 | 0.4 | 0.51 |
| 50 | 4.51 | 0.5 | 0.69 |
| 60 | 6.50 | 0.6 | 0.92 |
| 70 | 9.52 | 0.7 | 1.20 |
| 80 | 15.02 | 0.8 | 1.61 |
| 90 | 26.59 | 0.9 | 2.30 |

图14
样本点与曲线拟合效果"
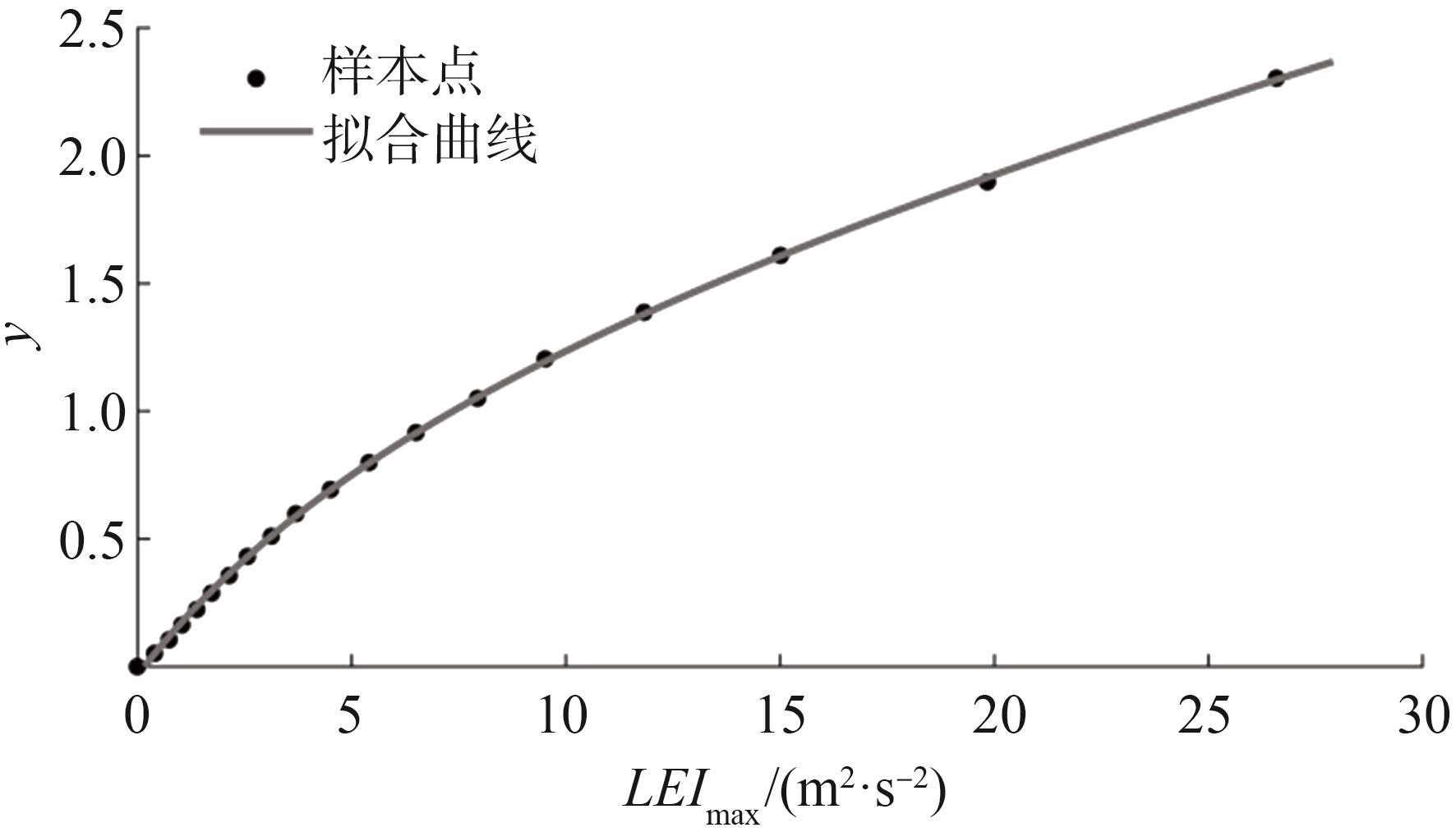

图15
HighD数据集换道轨迹RSL量化结果分布情况"
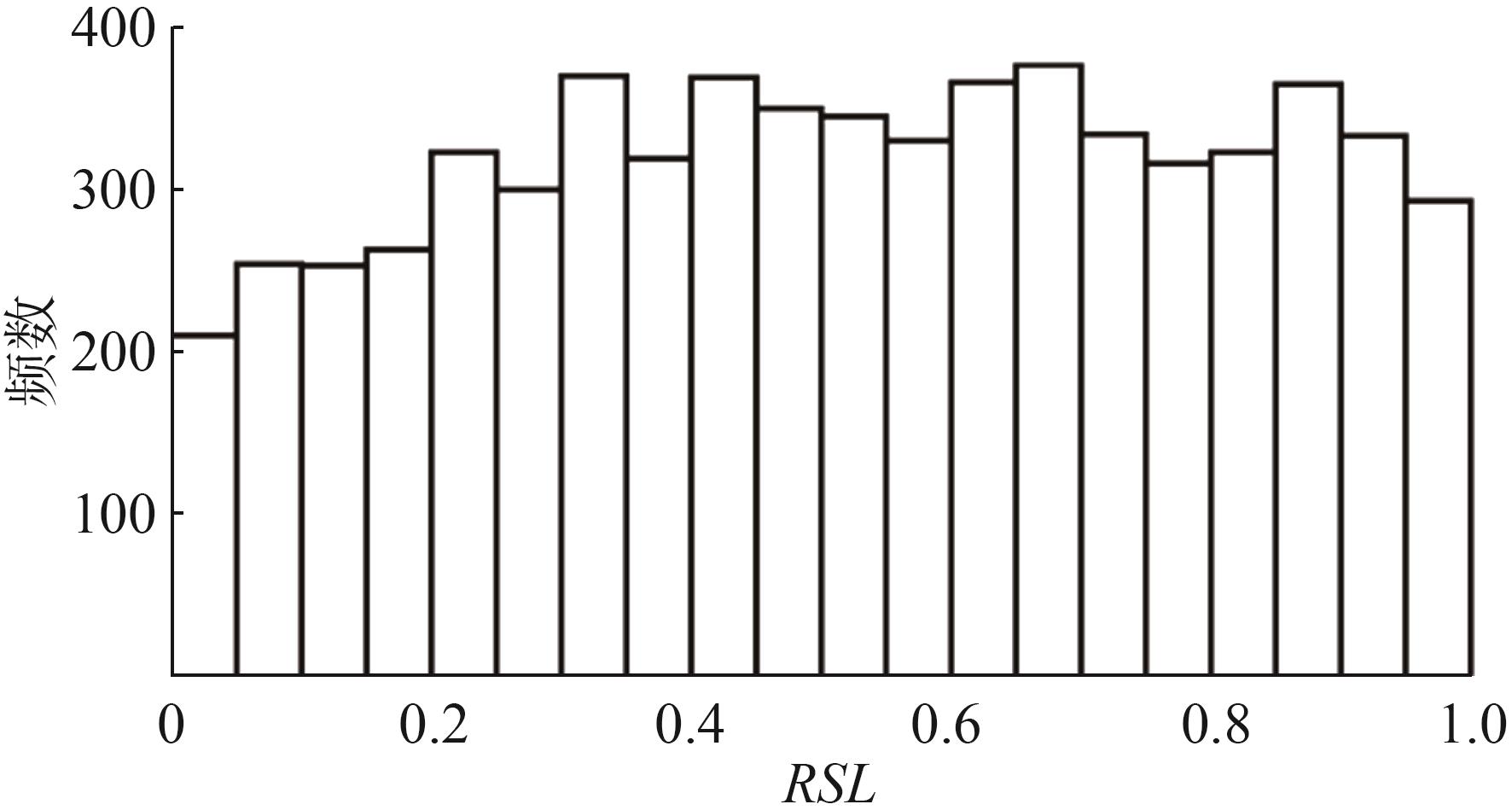
图16
两种换道类型风险量化结果"
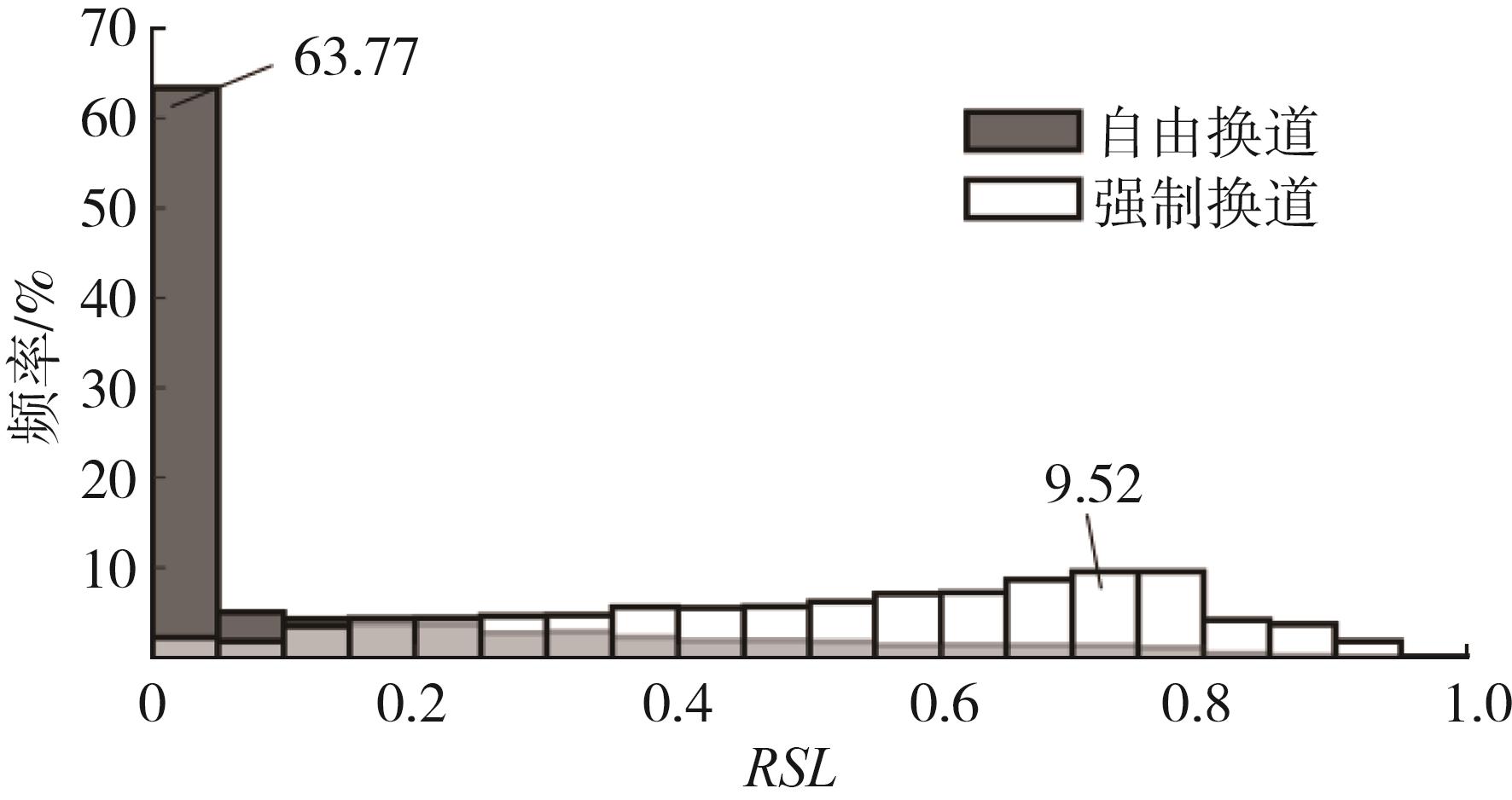
表5
两种换道类型量化结果统计"
| 换道类型 | 统计指标 | 换道总时长/s | 风险暴露时长/s | 最大损失能量指数/ (m2·s-2) |
|---|---|---|---|---|
| 自由换道 | 平均值 | 4.964 6 | 1.293 5 | 3.364 1 |
| 最大值 | 7.960 0 | 7.520 0 | 158.140 4 | |
| 最小值 | 2.360 0 | 0 | 0 | |
| 方差 | 0.615 2 | 2.829 2 | 78.650 9 | |
| 强制换道 | 平均值 | 5.064 9 | 4.075 3 | 15.422 7 |
| 最大值 | 8.560 0 | 8.000 0 | 146.197 8 | |
| 最小值 | 2.520 0 | 0 | 0 | |
| 方差 | 0.734 8 | 0.962 4 | 327.346 7 |

图17
不同位置换道平均量化风险值"
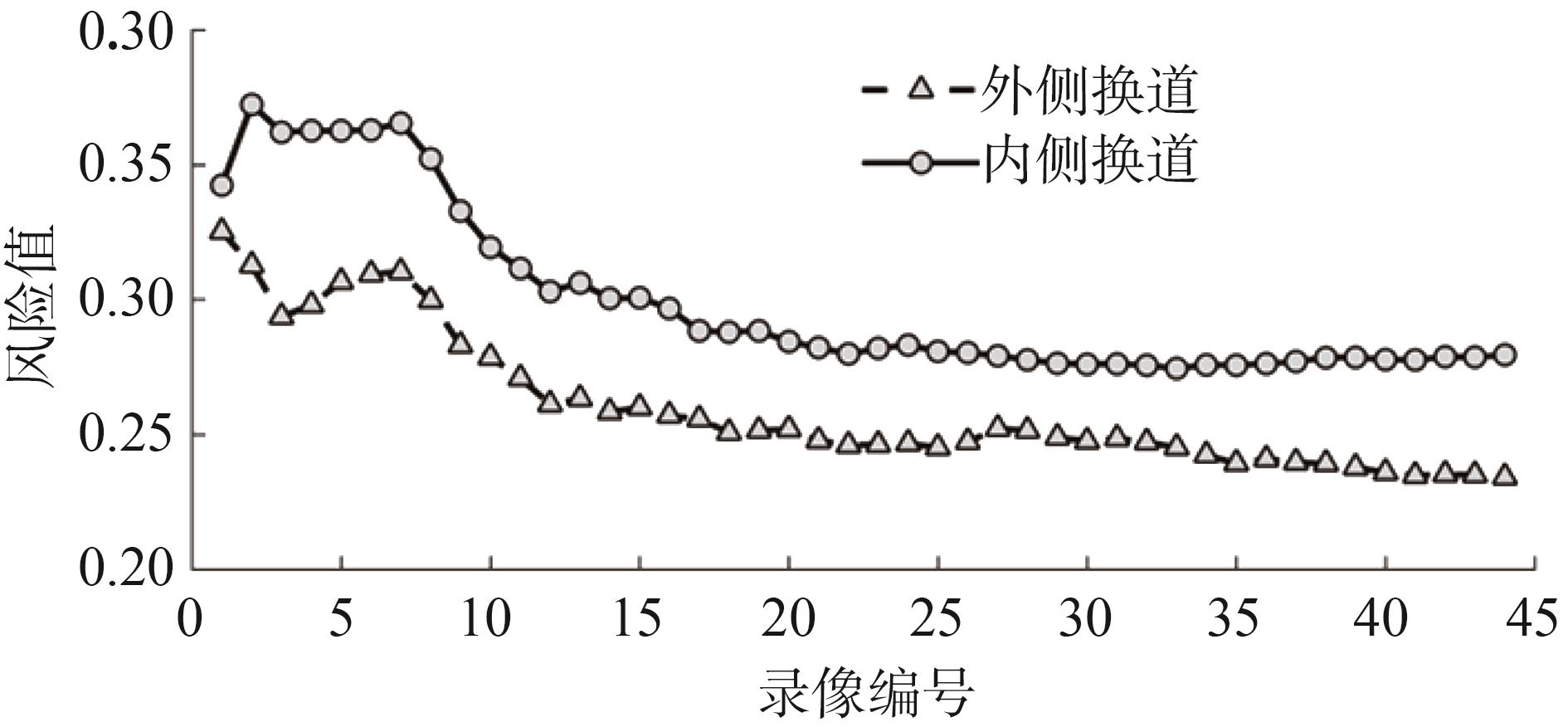
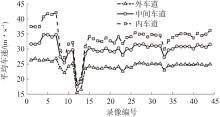
图18
不同车道车辆平均车速"
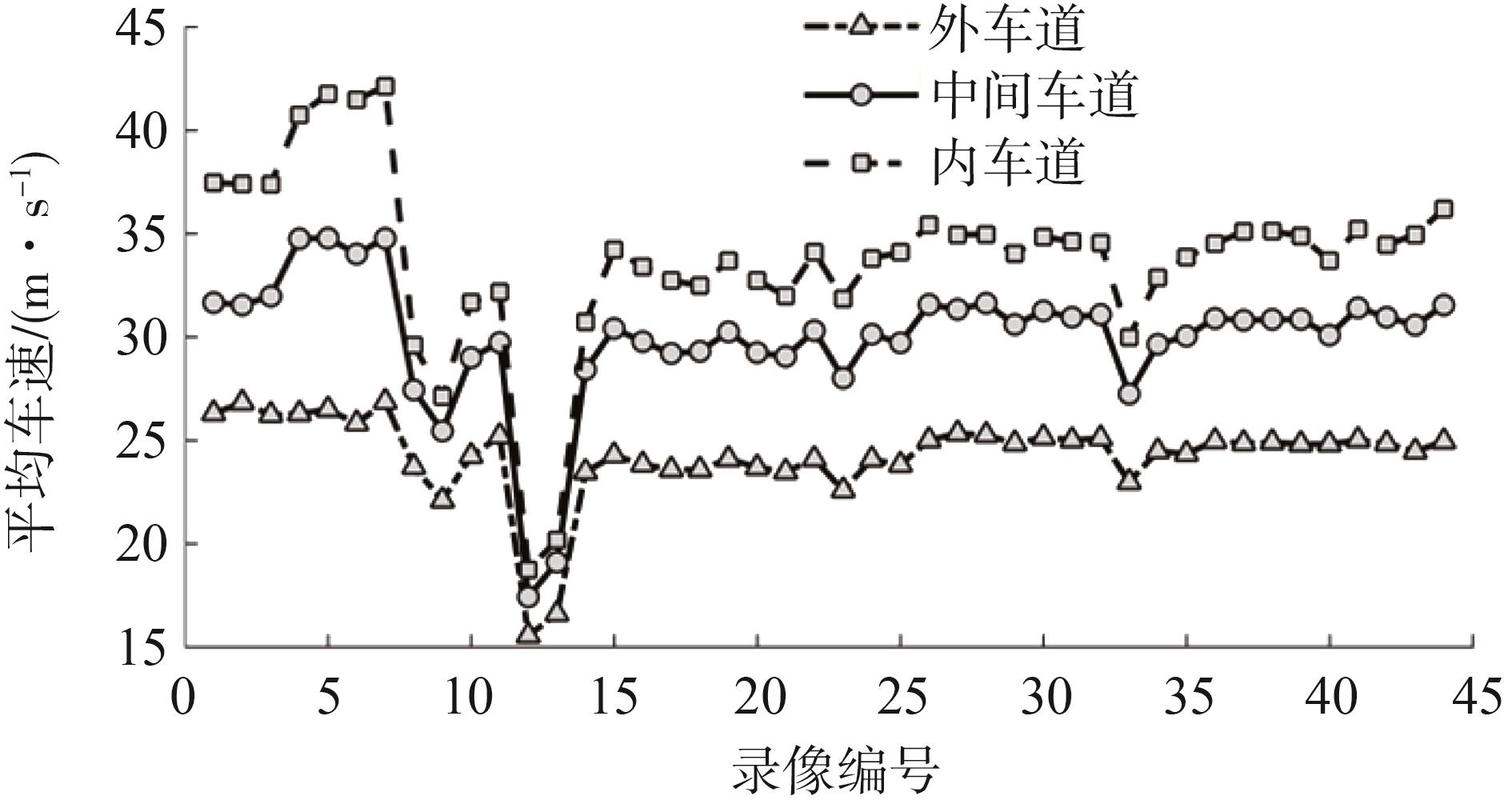

图19
不同位置换道平均换道时长"
| 1 | HOU Y, EDARA P, SUN C. Situation assessment and decision making for lane change assistance using ensemble learning methods[J]. Expert Systems with Applications, 2015, 42(8):3875-3882. |
| 2 | FERREIRA S, COUTO A. A probabilistic approach towards a crash risk assessment of urban segments[J]. Transportation Research Part C: Emerging Technologies, 2015, 50:97-105. |
| 3 | GLAUZ W D, MIGLETZ D J. Application of traffic conflict analysis at intersections[M]. Transportation Research Board, National Research Council, 1980. |
| 4 | 孙立云. 城市道路交叉口事故预测模型及算法研究[D]. 北京:北京交通大学, 2011. |
| SUN L Y. Research on urban road intersection-accident prediction model and algorithm[D]. Beijing: Beijing Jiaotong University, 2011. | |
| 5 | PARK H, OH C, MOON J, et al. Development of a lane change risk index using vehicle trajectory data [J]. Accident Analysis & Prevention, 2018, 110:1-8. |
| 6 | ZHENG L, SAYED T. From univariate to bivariate extreme value models: approaches to integrate traffic conflict indicators for crash estimation[J]. Transportation Research Part C: Emerging Technologies, 2019, 103:211-225. |
| 7 | 容颖, 温惠英, 赵胜. 高速公路单向双车道车辆群行车风险度量研究[J]. 重庆交通大学学报(自然科学版), 2019, 38(9): 95-100. |
| RONG Y, WEN H, ZHAO S. Study on driving risk measurement for two⁃lane freeway vehicle group[J]. Journal of Chongqing Jiaotong University(Natural Science), 2019, 38(9): 95-100. | |
| 8 | OH C, KIM T. Estimation of rear-end crash potential using vehicle trajectory data[J]. Accident Analysis & Prevention, 2010, 42(6):1888-1893. |
| 9 | WENG J, DU G, LI D, et al. Time⁃varying mixed logit model for vehicle merging behavior in work zone merging areas[J]. Accident Analysis and Prevention, 2018, 117(AUG.):328-339. |
| 10 | 周斌宇. 基于车车协同的车辆安全换道预警机制研究[D]. 长春: 吉林大学, 2020. |
| Zhou B Y. Research on vehicle safety lane change warning strategy based on vehicle⁃to⁃vehicle collaboration[D]. Changchun:Jilin University, 2020. | |
| 11 | 何爱生. 考虑后车减速度的换道预警阈值研究[D]. 西安: 长安大学, 2019. |
| HE A S. Research on the lane change warning threshold considering the deceleration of the rear vehicles[D]. Xi’an: Chang’an University, 2019. | |
| 12 | 杨俊. 车辆频繁换道对道路行车效率与安全影响研究[D].西安: 长安大学, 2016. |
| YANG J. Research on the efficiency and safety of frequent lane change in urban roads[D]. Xi’an: Chang’an University, 2016. | |
| 13 | 王畅, 付锐, 郭应时, 等. 换道预警系统中越线时间的预测方法[J]. 汽车工程, 2014, 36(4):509-514. |
| WANG C, FU R, GUO Y, et al. Prediction method of time-to-line⁃crossing in lane change warning system[J]. Automotive Engineering, 2014, 36(4):509-514. | |
| 14 | 何仁, 赵晓聪, 杨奕彬, 等. 基于驾驶人风险响应机制的人机共驾模型[J].吉林大学学报(工学版), 2021, 51(3):799-809. |
| HE R, ZHAO X C, YANG Y B, et al. Man⁃machine shared driving model using risk⁃response mechanism of human driver[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3):799-809. | |
| 15 | SVENSSON A. A method for analysing the traffic process in a safety perspective [D]. Lund University, 1998. |
| 16 | PARK H, OH C, MOON J, et al. Development of a lane change risk index using vehicle trajectory data[J]. Accident Analysis and Prevention, 110(JAN.):1-8 |
| 17 | 张航, 张肖磊, 吕能超. 高速公路停车视距可靠性设计[J]. 公路交通科技, 2019, 36(4):44-49,87. |
| ZHANG H, ZHANG X L, LV N C, et al. Reliability design for stopping sight distance of expressway[J]. Journal of Highway and Transportation Research and Development, 2019, 36(4):44-49,87. | |
| 18 | BAGDADI O. Estimation of the severity of safety critical events[J]. Accident Analysis and Prevention, 2013, 50:167-174. |
| 19 | 丁明, 肖遥, 张晶晶, 等. 基于事故链及动态故障树的电网连锁故障风险评估模型[J]. 中国电机工程学报, 2015, 35(4):821-829. |
| DING M, XIAO Y, ZHANG J, et al. Risk assessment model of power grid cascading failures based on fault chain and dynamic fault tree[J]. Proceedings of the Csee, 2015, 35(4):821-829. | |
| 20 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]. Maui, HI, USA:IEEE International Conference on Intelligent Transportation Systems (ITSC), 2018:2118-2125. |
| 21 | 杨智强. 从德国高速公路看事故预防先进做法[J]. 湖南交通科技, 2019, 45(3):208-214. |
| YANG Z Q. Advanced methods of accident prevention from German expressway[J]. Hunan Communication Science and Technology, 2019, 45(3):208-214. | |
| 22 | 蔡英凤, 朱南楠, 邰康盛, 等. 基于注意力机制的车辆行为预测[J]. 江苏大学学报(自然科学版), 2020, 41(2):125-130. |
| CAI Y F, ZHU N N, TAI K S, et al. Vehicle behavior prediction based on attention mechanism[J]. Journal of Jiangsu University (Natural Science), 2020, 41(2):125-130. | |
| 23 | 田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划[J]. 汽车工程, 2021, 43(4):518-526. |
| TIAN H Q, DING F, ZHENG X J, et al. Motion planning based on virtual force of potential field for intelligent connected vehicles[J]. Automotive Engineering, 2021, 43(4):518-526. | |
| 24 | 季学武, 费聪, 何祥坤, 等. 基于 LSTM 网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6):34-42. |
| JI X W, FEI C, HE X K,et al. Intention recognition and trajectory prediction for vehicle using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6):34-42. | |
| 25 | 工程师测评. 德国2019年全年新车销量[EB/OL]. https://chejiahao.autohome.com.cn/info/5502083. |
| EvaluationEngineer. New car sales in Germany in 2019[EB/OL]. https://chejiahao.autohome.com.cn/info/5502083. | |
| 26 | 张驰. 基于驾驶员风险认知的自动驾驶车辆运动规划研究[D]. 长春吉林大学, 2020. |
| ZHANG Chi. Research on motion planning of autonomous vehicle based on driver's hazard perception[D].Changchun:Jilin University, 2020. |
| [1] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [2] | 梅润,褚端峰,高博麟,李克强,丛炜,陈超义. 基于云控系统的队列预测性巡航与换道决策[J]. 汽车工程, 2023, 45(8): 1299-1308. |
| [3] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [4] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [5] | 吕彦直,魏超,何元浩. 基于GCN和CIL的端到端自动驾驶换道方法[J]. 汽车工程, 2023, 45(12): 2310-2317. |
| [6] | 唐斌,许占祥,江浩斌,蔡英凤,胡子添,杨铮奕. 基于分段优化的车辆换道避障轨迹规划[J]. 汽车工程, 2022, 44(6): 831-841. |
| [7] | 黄圣杰,胡满江,周云水,殷周平,秦晓辉,边有钢,贾倩倩. 动态场景下基于语义分割与运动一致性约束的车辆视觉SLAM[J]. 汽车工程, 2022, 44(10): 1503-1510. |
| [8] | 朱乃宣,高振海,胡宏宇,吕颖,赵伟光. 基于交通风险评估的个性化换道触发研究[J]. 汽车工程, 2021, 43(9): 1314-1321. |
| [9] | 牛国臣,李文帅,魏洪旭. 基于双五次多项式的智能汽车换道轨迹规划[J]. 汽车工程, 2021, 43(7): 978-986. |
| [10] | 章军辉,付宗杰,郭晓满,李庆,陈大鹏,赵野. 基于HS⁃FCM模糊聚类的快速多目标车辆跟踪算法[J]. 汽车工程, 2021, 43(10): 1419-1426. |
| [11] | 宋晓琳,盛鑫,曹昊天,李明俊,易滨林,黄智. 基于模仿学习和强化学习的智能车辆换道行为决策[J]. 汽车工程, 2021, 43(1): 59-67. |
| [12] | 张家旭, 施正堂, 赵健, 朱冰. 基于Radau伪谱法的汽车高速紧急换道避障最优控制策略设计*[J]. 汽车工程, 2020, 42(8): 1040-1049. |
| [13] | 陈无畏, 王其东, 丁雨康, 赵林峰, 王慧然, 谢有浩. 基于预期偏移距离的人机权值分配策略研究*[J]. 汽车工程, 2020, 42(4): 513-521. |
| [14] | 刘志强, 韩静文, 倪捷. 智能网联环境下的多车协同换道策略研究*[J]. 汽车工程, 2020, 42(3): 299-306. |
| [15] | 高振海, 朱乃宣, 高菲, 梅兴泰, 张进, 何磊. 考虑驾驶员特性的自学习换道轨迹规划系统*[J]. 汽车工程, 2020, 42(12): 1710-1717. |
|