汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1503-1510.doi: 10.19562/j.chinasae.qcgc.2022.10.004
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
黄圣杰1,胡满江1,2,周云水1,2,殷周平1,秦晓辉1,2( ),边有钢1,2,贾倩倩3
),边有钢1,2,贾倩倩3
Shengjie Huang1,Manjiang Hu1,2,Yunshui Zhou1,2,Zhouping Yin1,Xiaohui Qin1,2(),Yougang Bian1,2,Qianqian Jia3
摘要:
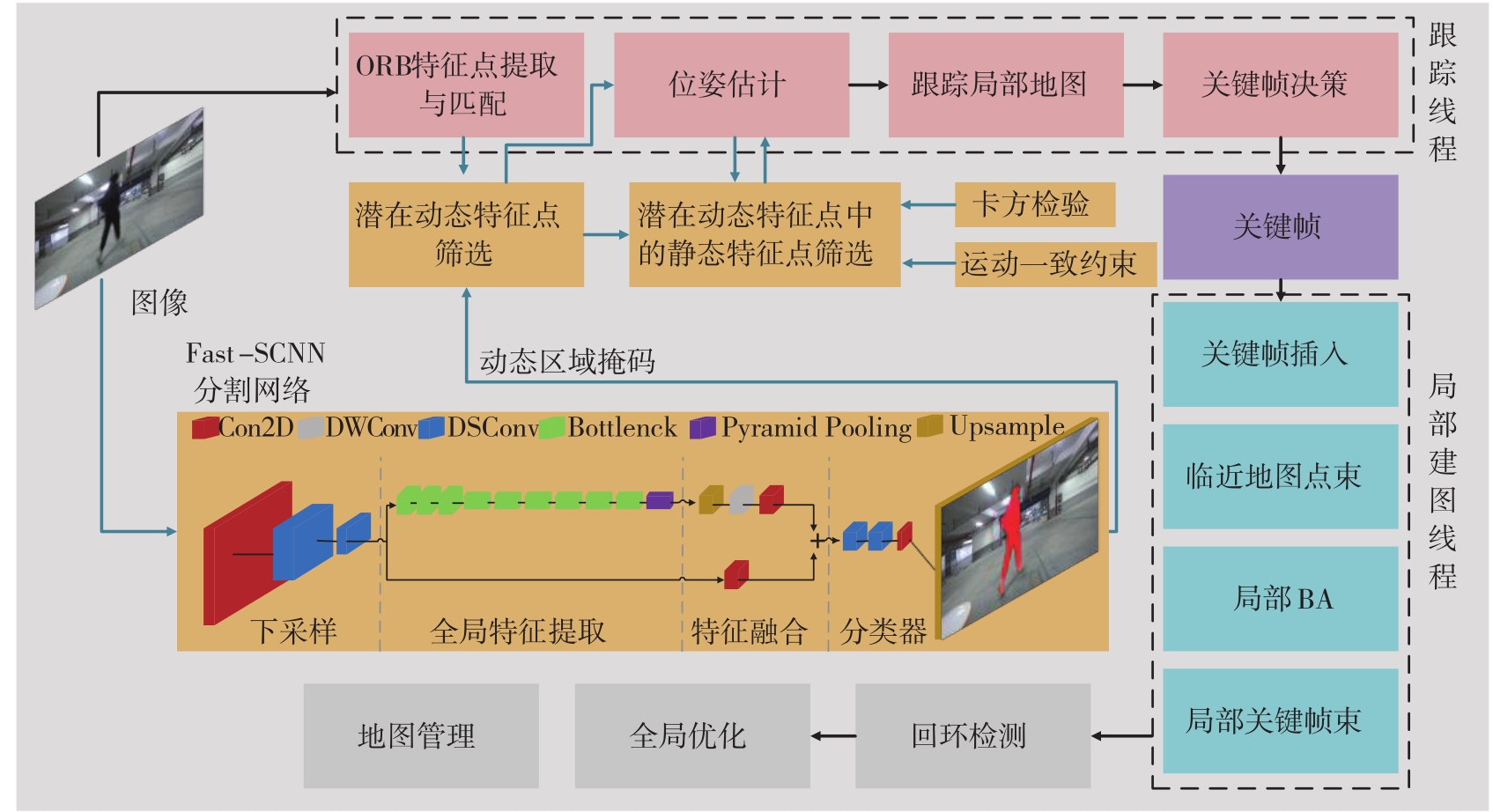
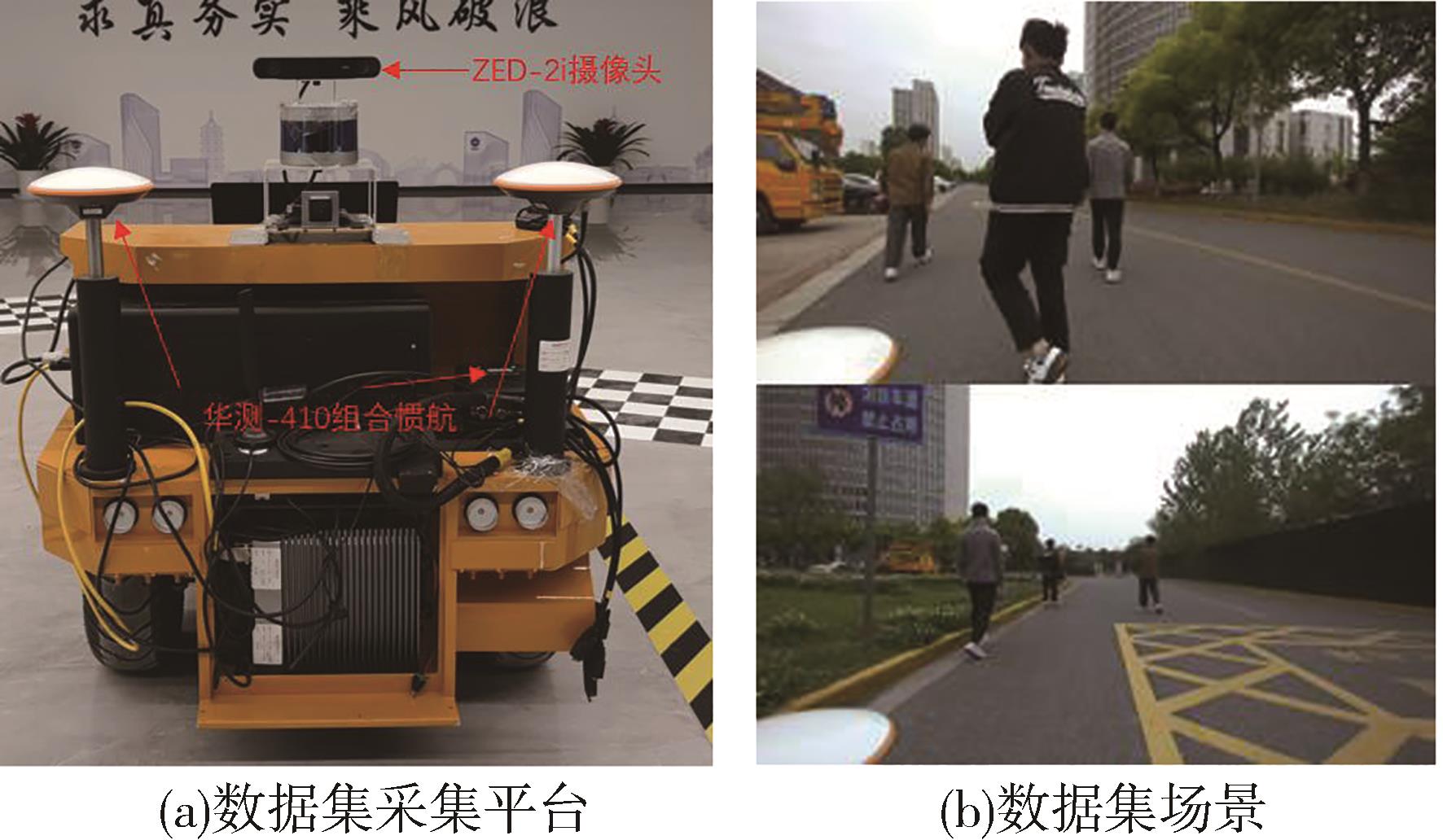
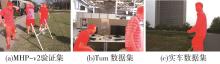
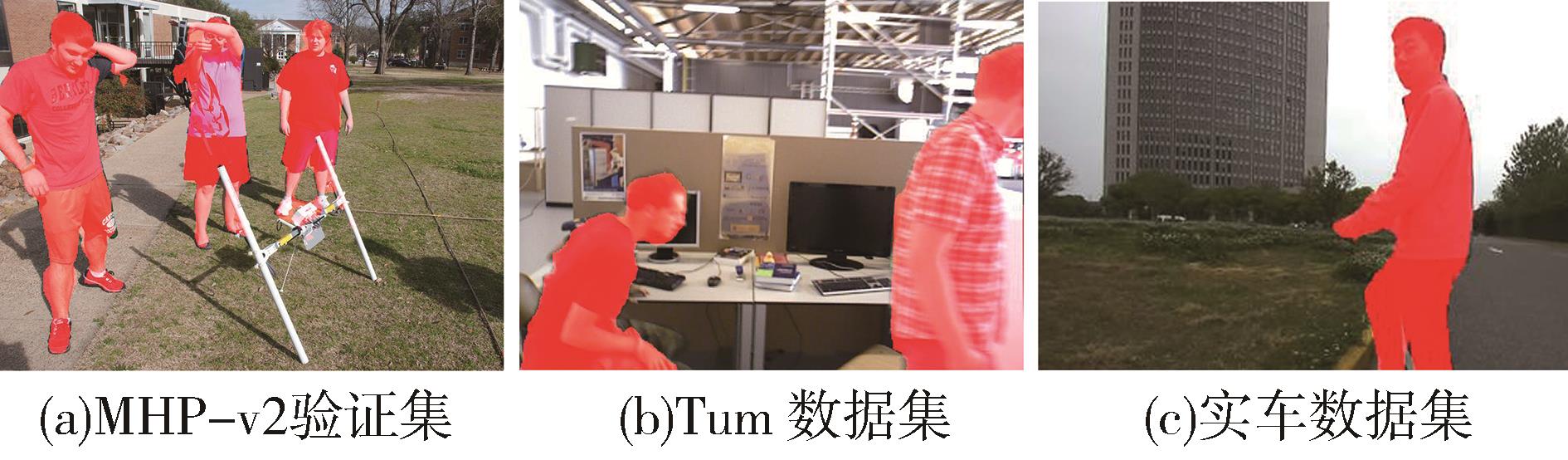
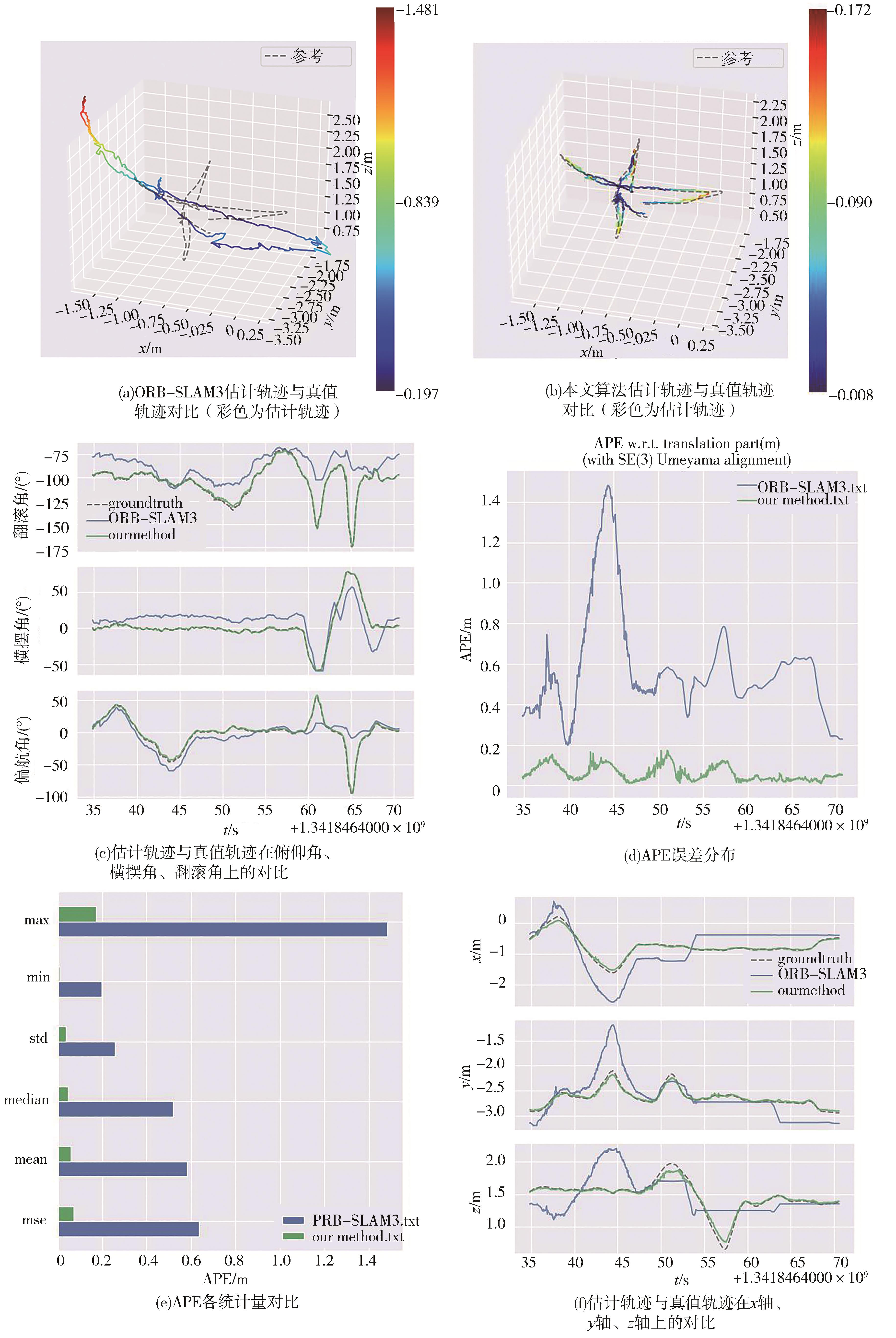
传统的车辆同时定位与建图方法多依赖于静态环境假设,在动态场景下易引起位姿估计精度下降甚至前端视觉里程计跟踪失败。本文结合Fast-SCNN实时语义分割网络与运动一致性约束,提出一种动态场景视觉SLAM方法。首先利用Fast-SCNN获取潜在动态目标的分割掩码并进行特征点去除,以获取相机位姿的初步估计;随后基于运动约束与卡方检验完成潜在动态目标中静态点的重添加,以进一步优化相机位姿。验证集测试表明,所训练的语义分割网络平均像素精度和交并比超过90%,单帧图片处理耗时约14.5 ms,满足SLAM系统的分割精度与实时性要求。慕尼黑大学公开数据集和实车数据集测试表明,融合本文算法的ORB-SLAM3部分指标平均提升率超过80%,显著提升了动态场景下的SLAM运行精度与鲁棒性,有助于保障智能车辆的安全性。