汽车工程 ›› 2022, Vol. 44 ›› Issue (12): 1809-1817.doi: 10.19562/j.chinasae.qcgc.2022.12.002
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
蒋朝阳( ),兰天然,郑晓妮,高九龙,叶学通
),兰天然,郑晓妮,高九龙,叶学通
收稿日期:2022-07-04
修回日期:2022-07-26
出版日期:2022-12-25
发布日期:2022-12-22
通讯作者:
蒋朝阳
E-mail:cjiang@bit.edu.cn
基金资助:
Chaoyang Jiang(),Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye
Received:2022-07-04
Revised:2022-07-26
Online:2022-12-25
Published:2022-12-22
Contact:
Chaoyang Jiang
E-mail:cjiang@bit.edu.cn
摘要:
可靠的定位与导航是实现自动驾驶的先决条件。单车视觉同时定位与建图(SLAM)技术能够在GNSS拒止的情况下实现车辆的定位,但累积误差会随运行时间逐渐增加,难以持续准确完成定位任务。通过多车协同视觉SLAM可以提升定位效果。本文提出了一种鲁棒、轻量化的分布式多车协同视觉SLAM系统,该系统以ORB-SLAM2作为视觉里程计,利用NetVLAD全局图像描述子实现多车间共视区域识别和数据关联;提出了一种基于数据相似性和结构一致性的方法,实现多车间闭环离群值剔除;提出了一种分布式位姿图优化方法,提高多车协同定位精度。经过自主搭建平台所采集的真实数据以及KITTI数据集测试,该系统相较于已有的主流视觉SLAM算法以及协同SLAM算法均具有更高的定位精度。
蒋朝阳,兰天然,郑晓妮,高九龙,叶学通. 分布式多车协同视觉SLAM系统[J]. 汽车工程, 2022, 44(12): 1809-1817.
Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System[J]. Automotive Engineering, 2022, 44(12): 1809-1817.
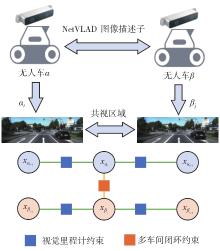
图1
多车协同定位增强系统原理图"
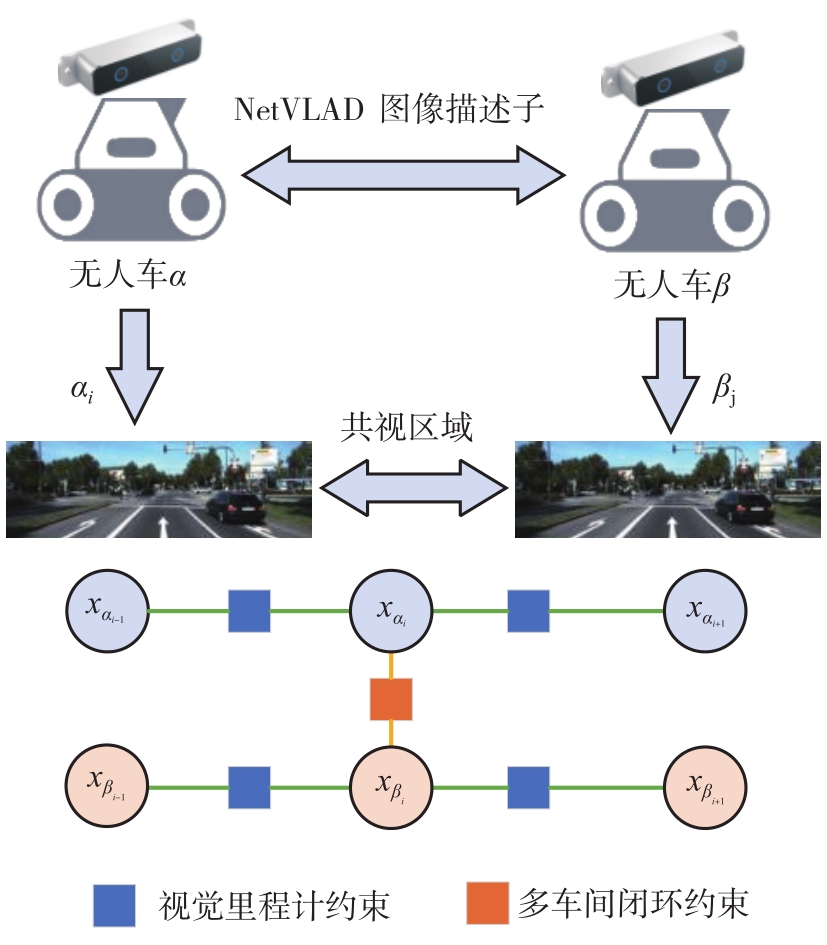
图2
分布式多车协同视觉SLAM系统框图"

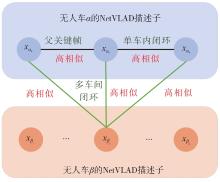
图3
基于数据相似性计算相似度评分原理"
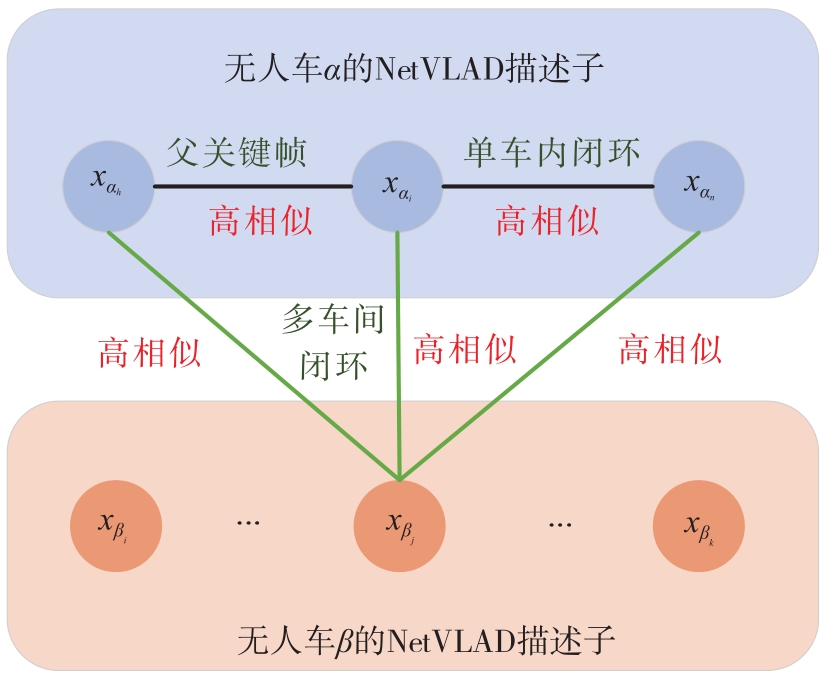
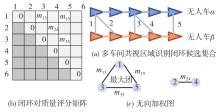
图4
闭环质量评分矩阵与最大团原理"

图5
校园道路环境真实数据"
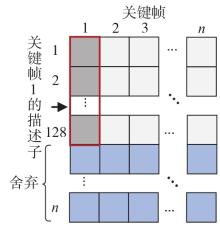
图6
图像的NetVLAD描述子表现形式"
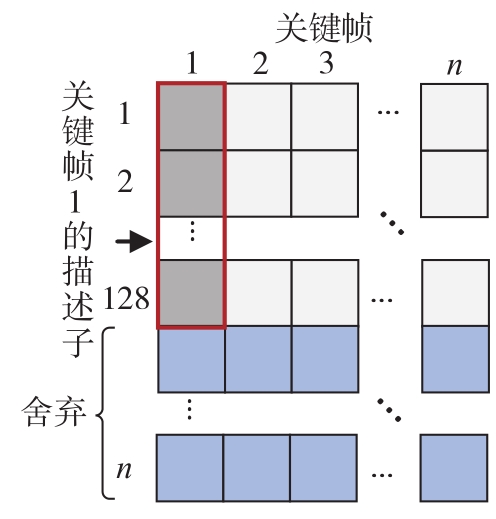
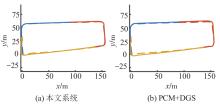
图7
校园道路环境下不同协同定位方法比较"
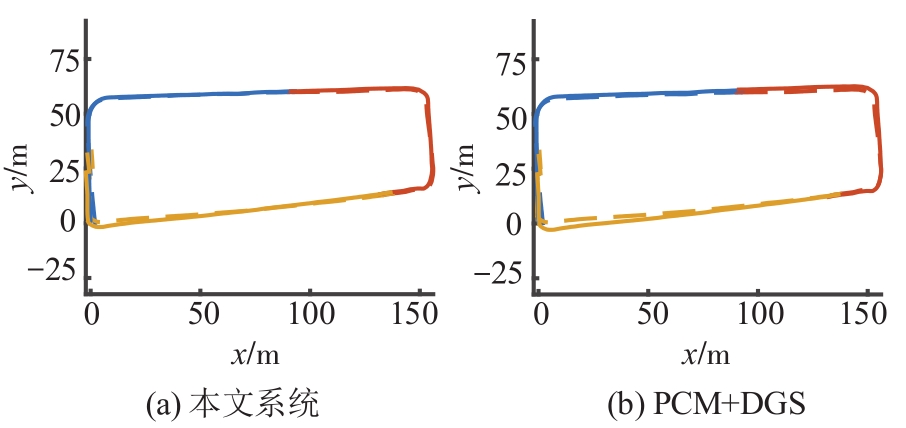

图8
校园道路数据集卫星投影及协同定位结果"

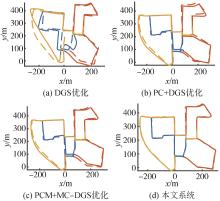
图9
不同算法步骤处理下的协同定位结果"
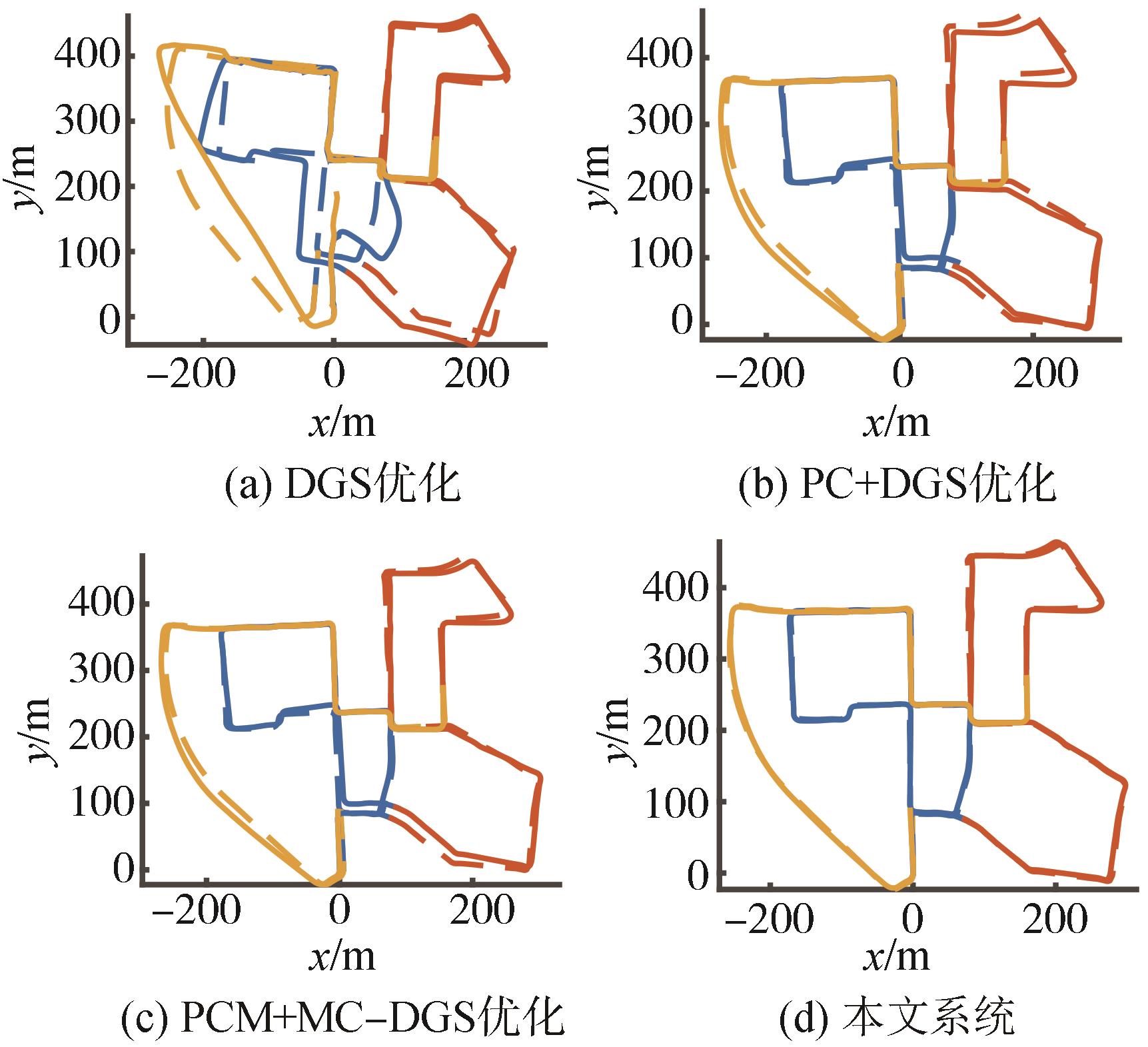
表1
不同算法步骤下的APE误差对比"
| 算法步骤 | 最大值/m | 平均值/m | RMSE/m |
|---|---|---|---|
| DGS | 61.48 | 15.33 | 20.25 |
| PCM+DGS | 12.22 | 3.97 | 3.65 |
| PCM+MC-DGS | 11.55 | 3.18 | 2.95 |
| 本文系统 | 3.50 | 1.91 | 2.25 |
表2
现有单车、协同视觉SLAM算法误差对比"
| SLAM系统 | RMSE/m | |
|---|---|---|
| 单车SLAM | VINS-Fusion | 11.65 |
| ORB-SLAM2 | 6.82 | |
协同SLAM | DSLAM | 4.00 |
| DOOR-SLAM | 8.00 | |
| 本文系统 | 2.25 | |
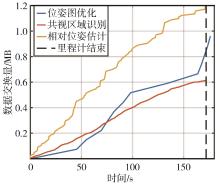
图10
系统各个模块的数据传输量变化过程"
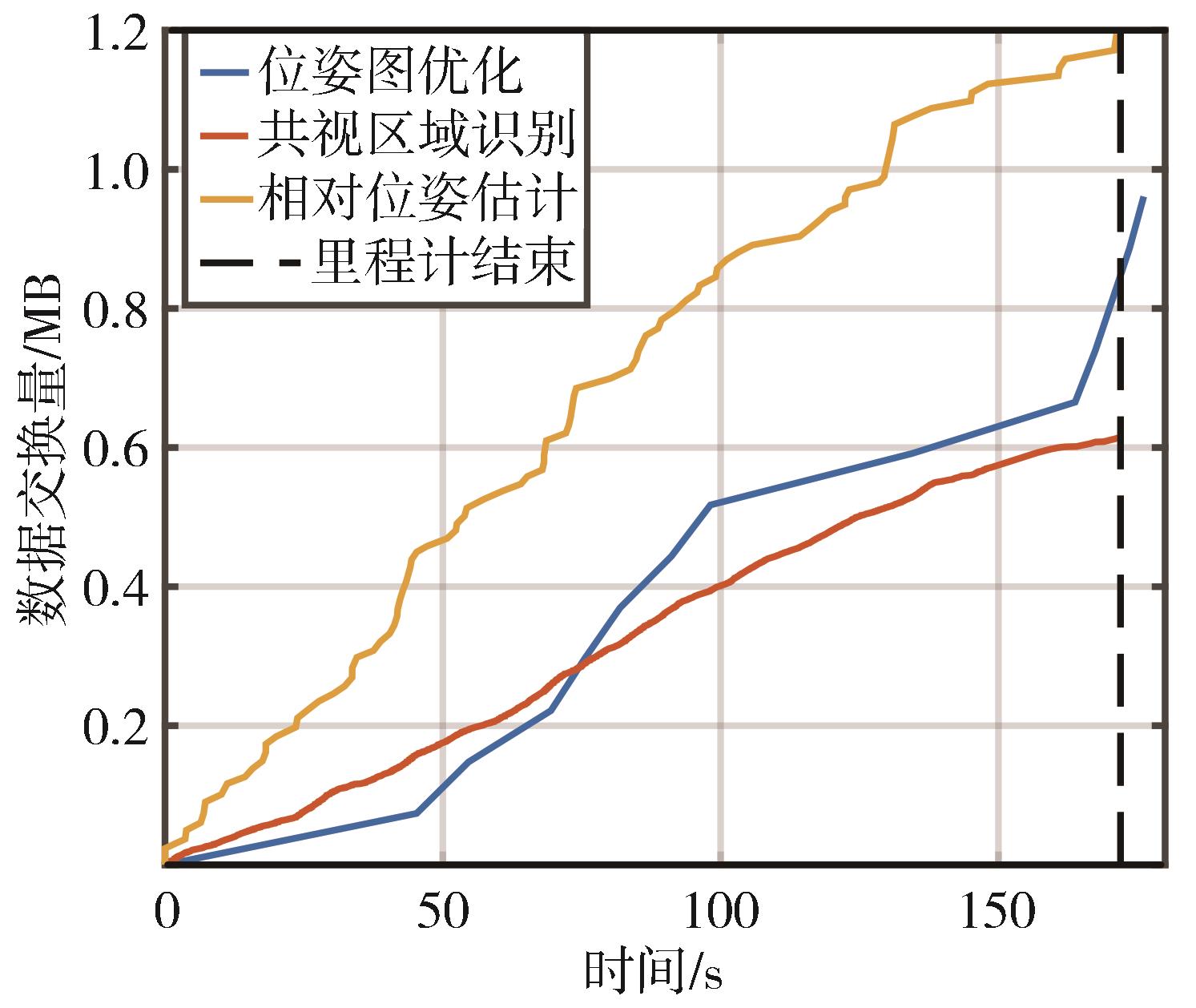
表3
不同环境、长度测试序列RMSE定位误差对比"
| 数据集 | 轨迹长度/m | 本文系统/m | DGS+PCM/m | ORB-SLAM2/m | VINS-Fusion/m |
|---|---|---|---|---|---|
| KITTI 00 城镇 | 3 724.187 | 2.25 | 3.65 | 6.82 | 11.65 |
| KITTI 01 高速 | 2 453.203 | 5.19 | 5.74 | 10.30 | 6.78 |
| KITTI 04 高速 | 393.645 | 0.28 | 0.28 | 0.17 | 0.19 |
| KITTI 07 城镇 | 694.697 | 0.48 | 0.49 | 0.51 | 0.97 |
| KITTI 08 城镇 | 3 222.795 | 1.47 | 1.40 | 3.58 | 9.89 |
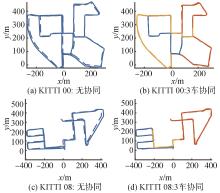
图11
无协同模式与3车协同模式定位效果对比"
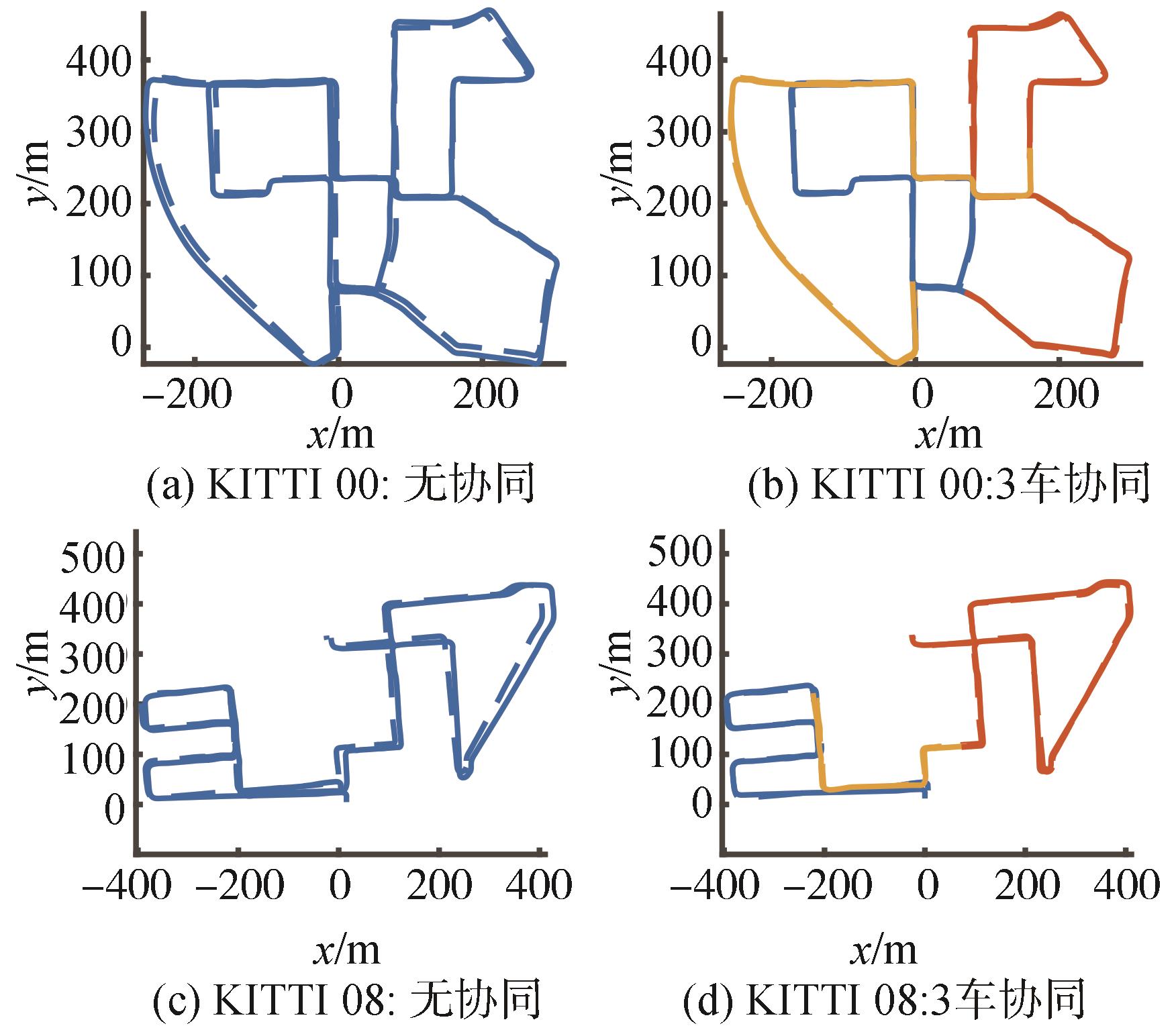
图12
每辆无人车定位误差随时间的变化"
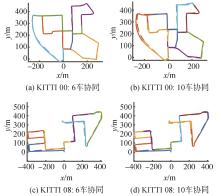
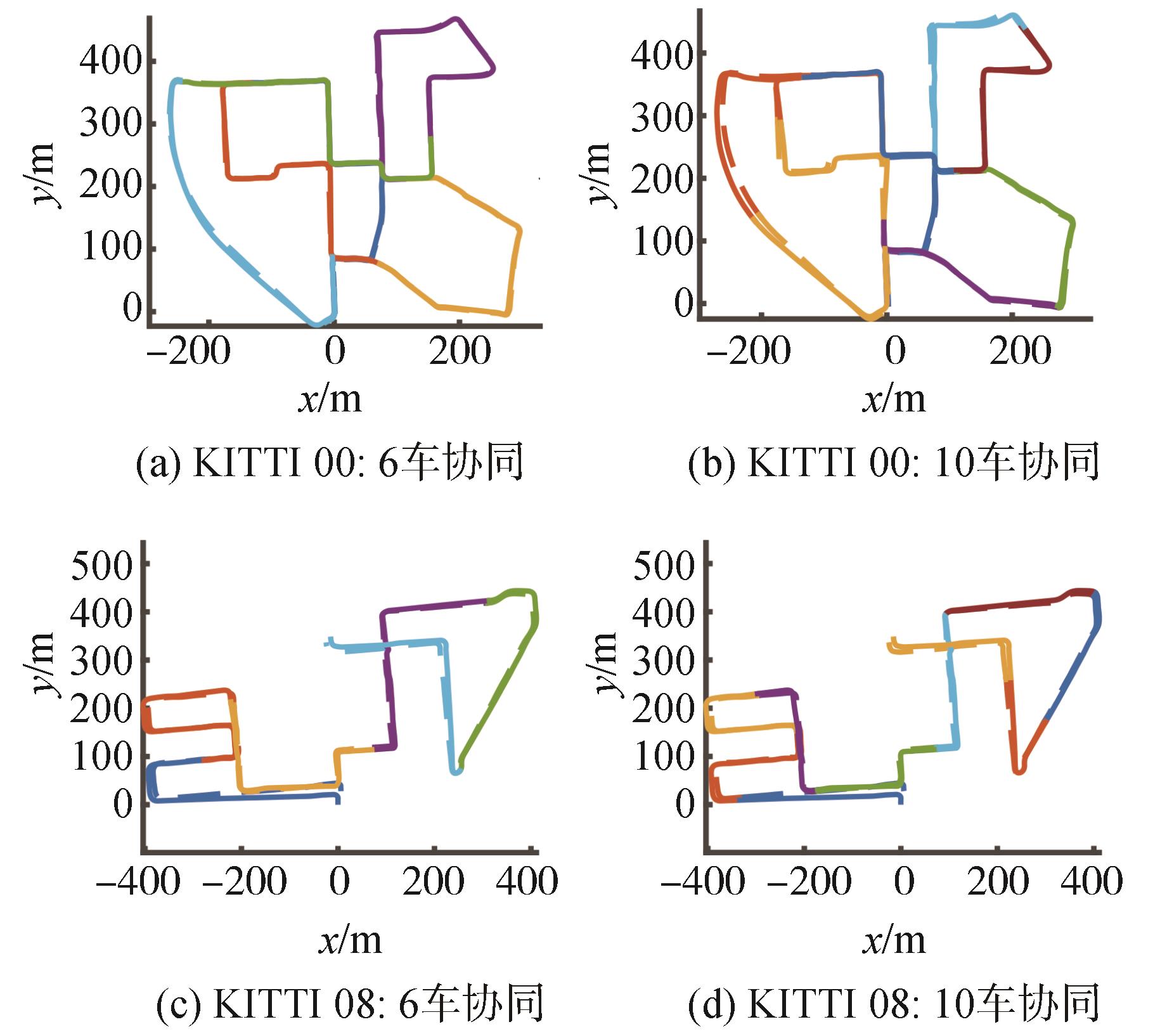
图13
不同数量无人车协同轨迹估计结果"
| 1 | BRESSON G, ALSAYED Z, YU L, et al. Simultaneous localization and mapping: a survey of current trends in autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(3): 194-220. |
| 2 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. |
| 3 | 曹立波, 陈峥, 颜凌波, 等. 基于RFID、视觉和UWB的车辆定位系统[J]. 汽车工程, 2017, 39(2): 225-231. |
| CAO L B, CHEN Z, YAN L B, et al. Vehicle positioning system based on RFID, vision and UWB[J]. Automotive Engineering, 2017, 39(2): 225-231. | |
| 4 | 蔡英凤, 陆子恒, 李祎承, 等. 基于多传感器融合的紧耦合SLAM系统[J]. 汽车工程, 2022, 44(3): 350-361. |
| CAI Y F, LU Z H, LI Y C, et al. Tightly coupled SLAM system based on multi-sensor fusion[J]. Automotive Engineering, 2022, 44(3): 350-361. | |
| 5 | HUANG G, HU Z Z, TAO Q W, et al. Improved intelligent vehicle self-localization with integration of sparse visual map and high-speed pavement visual odometry[J]. The Institution of Mechanical Engineers Part D-Journal of Automobile Engineering, 2021, 235(1): 177-187. |
| 6 | 胡玉文, 龚建伟, 姜岩, 等. 基于子地图的智能车辆同步定位与地图创建[J]. 汽车工程, 2015, 37(2): 224-229. |
| HU Y W, GONG J W, JIANG Y, et al. A sub-map-based simultaneous localization and mapping technique for intelligent vehicles[J]. Automotive Engineering, 2015, 37(2): 224-229. | |
| 7 | 孙宁, 闫梦如, 倪捷, 等. 基于GRI的多车协同定位研究[J]. 汽车工程, 2018, 40(4): 488-493,499. |
| SUN N, YAN M R, NI J, et al. A study on multi-vehicle cooperative positioning based on GRI[J]. Automotive Engineering, 2018, 40(4): 488-493,499. | |
| 8 | 段续庭, 田大新, 王云鹏. 基于V2X通信网络的车辆协同定位增强方法[J]. 汽车工程, 2018, 40(8): 947-951,959. |
| DUAN X T, TIAN D X, WANG Y P. Vehicle cooperative positioning enhancement method based on V2X communication networks[J]. Automotive Engineering, 2018, 40(8): 947-951,959. | |
| 9 | CAMPOS C, ELVIRA R, RODRíGUEZ J J G, et al. Orb-slam3: an accurate open-source library for visual, visual–inertial, and multimap slam [J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 10 | QIN T, LI P, SHEN S. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| 11 | SCHMUCK P, CHLI M. CCM‐SLAM: robust and efficient centralized collaborative monocular simultaneous localization and mapping for robotic teams[J]. Journal of Field Robotics, 2019, 36(4): 763-781. |
| 12 | KARRER M, SCHMUCK P, CHLI M. CVI-SLAM—collaborative visual-inertial SLAM[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 2762-2769. |
| 13 | SCHMUCK P, ZIEGLER T, KARRER M, et al. COVINS: visual-inertial SLAM for centralized collaboration[C]. 2021 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct). IEEE, 2021: 171-176. |
| 14 | BRESSON G, AUFRèRE R, CHAPUIS R. Consistent multi-robot decentralized slam with unknown initial positions[C]. Proceedings of the 16th International Conference on Information Fusion. IEEE, 2013: 372-379. |
| 15 | CUNNINGHAM A, INDELMAN V, DELLAERT F. DDF-SAM 2.0: consistent distributed smoothing and mapping[C]. 2013 IEEE International Conference on Robotics and Automation(ICRA). IEEE, 2013: 5220-5227. |
| 16 | TIAN Y, CHANG Y, ARIAS F H, et al. Kimera-multi: robust, distributed, dense metric-semantic SLAM for multi-robot systems[J]. IEEE Transactions on Robotics, 2022: 1-17. |
| 17 | CIESLEWSKI T, CHOUDHARY S, SCARAMUZZA D. Data-efficient decentralized visual SLAM[C]. 2018 IEEE International Conference on Robotics and Automation(ICRA). 2018: 2466-2473. |
| 18 | ARANDJELOVIC R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition[C]. IEEE Conference on Computer Vision and Pattern Recognition. 2016: 5297-5307. |
| 19 | LAJOIE P Y, RAMTOULA B, CHANG Y, et al. DOOR-SLAM: distributed, online, and outlier resilient SLAM for robotic teams[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1656-1663. |
| 20 | AGARWAL P, TIPALDI G D, SPINELLO L, et al. Robust map optimization using dynamic covariance scaling[C]. 2013 IEEE International Conference on Robotics and Automation(ICRA). 2013: 62-69. |
| 21 | MANGELSON J G, DOMINIC D, EUSTICE R M, et al. Pairwise consistent measurement set maximization for robust multi-robot map merging[C]. 2018 IEEE International Conference on Robotics and Automation(ICRA). IEEE, 2018: 2916-2923. |
| 22 | HUANG Y, SHAN T, CHEN F, et al. DiSCo-SLAM: distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global-local graph optimization [J]. IEEE Robotics and Automation Letters, 2021, 7(2): 1150-1157. |
| 23 | CHOUDHARY S, CARLONE L, NIETO C, et al. Distributed mapping with privacy and communication constraints: Lightweight algorithms and object-based models[J]. The International Journal of Robotics Research, 2017, 36(12): 1286-1311. |
| 24 | CARLONE L, ROSEN D M, CALAFIORE G, et al. Lagrangian duality in 3D SLAM: verification techniques and optimal solutions[C]. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). IEEE, 2015: 125-132. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [4] | 秦洪懋,沈国利,周云水,黄圣杰,秦晓辉,谢国涛,丁荣军. 特征稀疏场景下基于标签的车辆视觉SLAM[J]. 汽车工程, 2023, 45(9): 1543-1552. |
| [5] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [6] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [9] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
|