汽车工程 ›› 2022, Vol. 44 ›› Issue (12): 1818-1824.doi: 10.19562/j.chinasae.qcgc.2022.12.003
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
王大方1,刘磊1,曹江1( ),赵刚1,赵文硕1,唐伟2()
),赵刚1,赵文硕1,唐伟2()
Dafang Wang1,Lei Liu1,Jiang Cao1(),Gang Zhao1,Wenshuo Zhao1,Wei Tang2()
摘要:
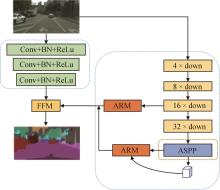
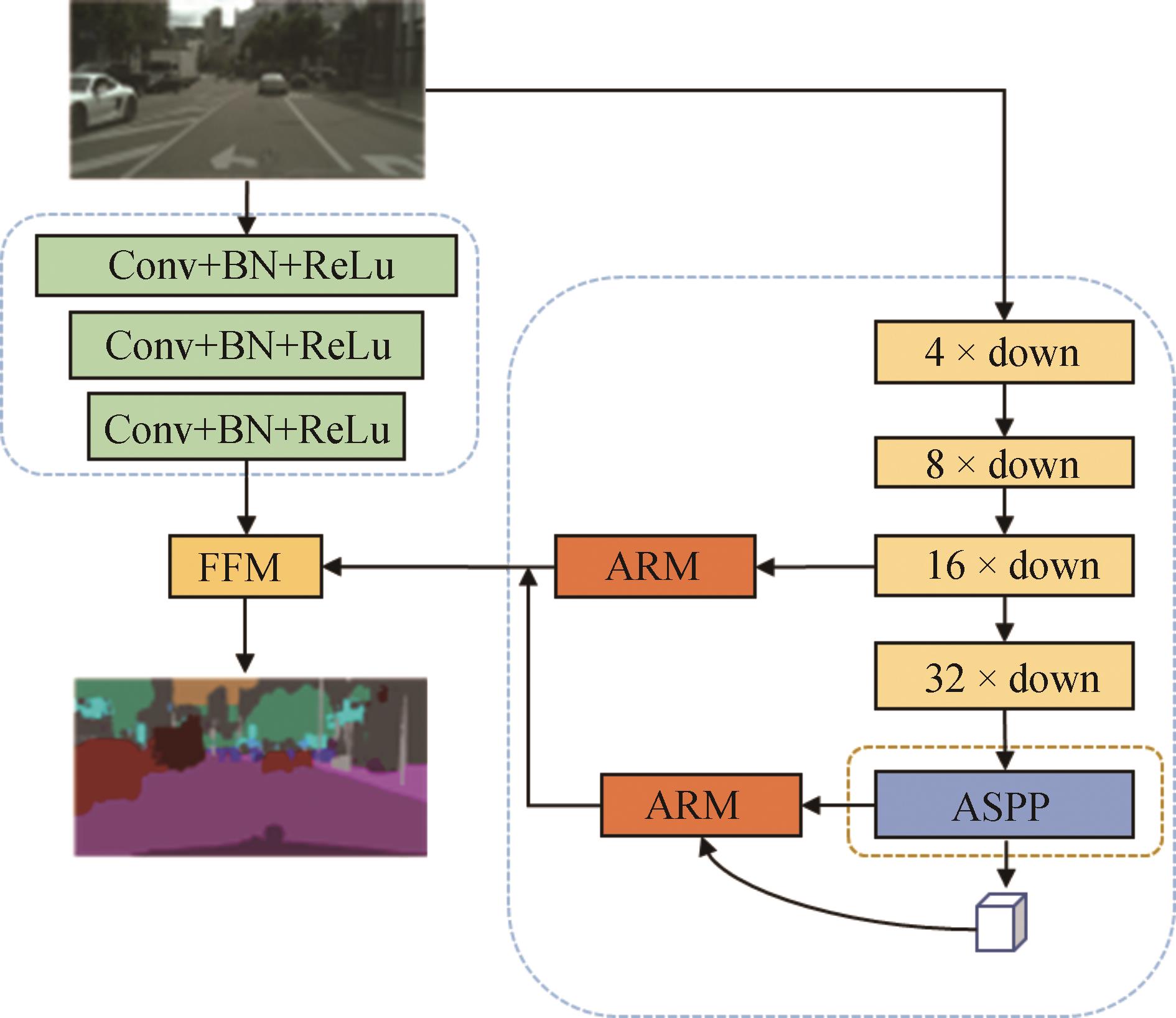
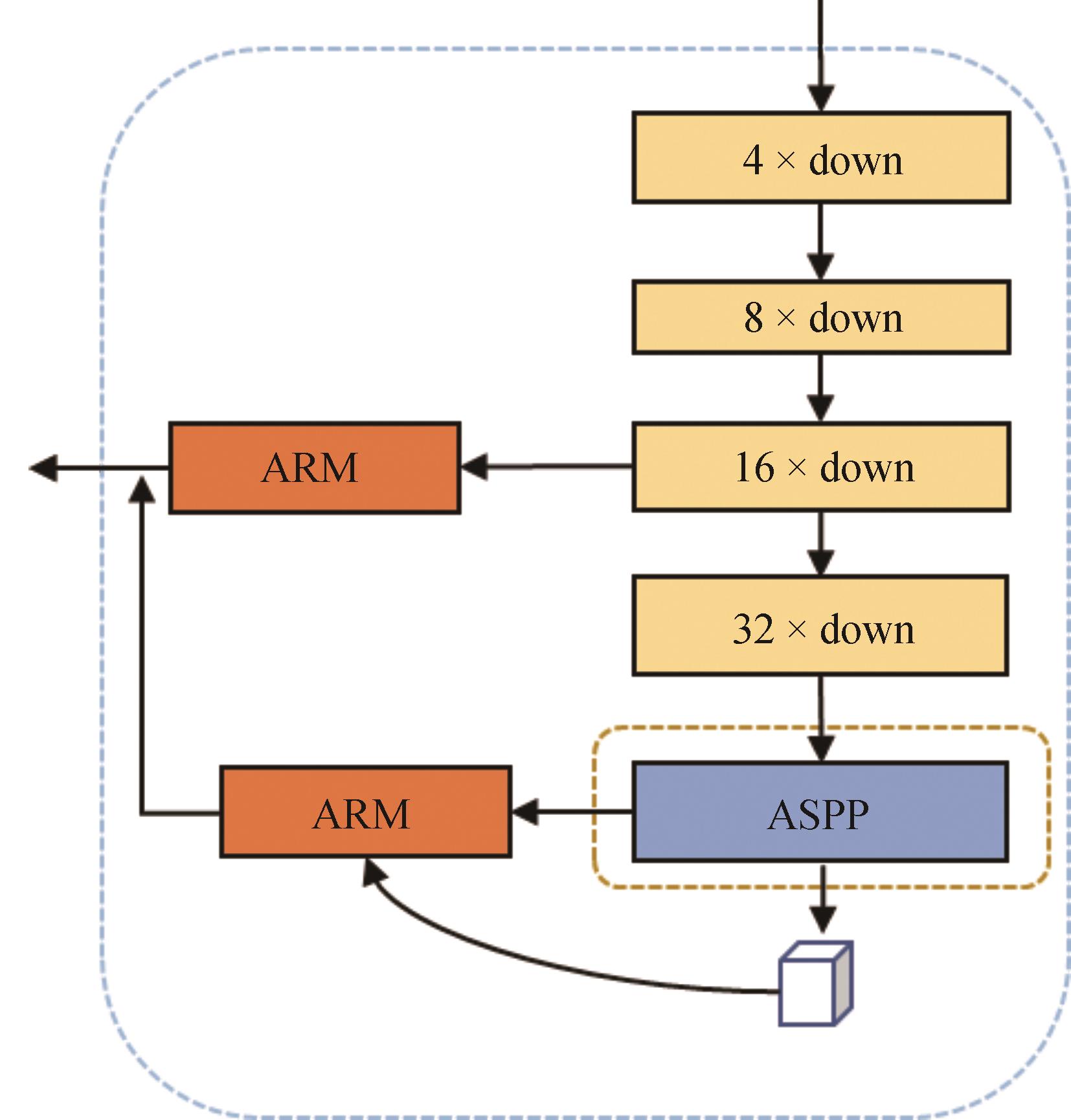
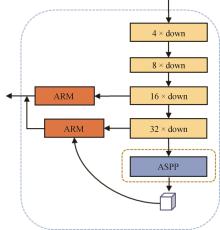
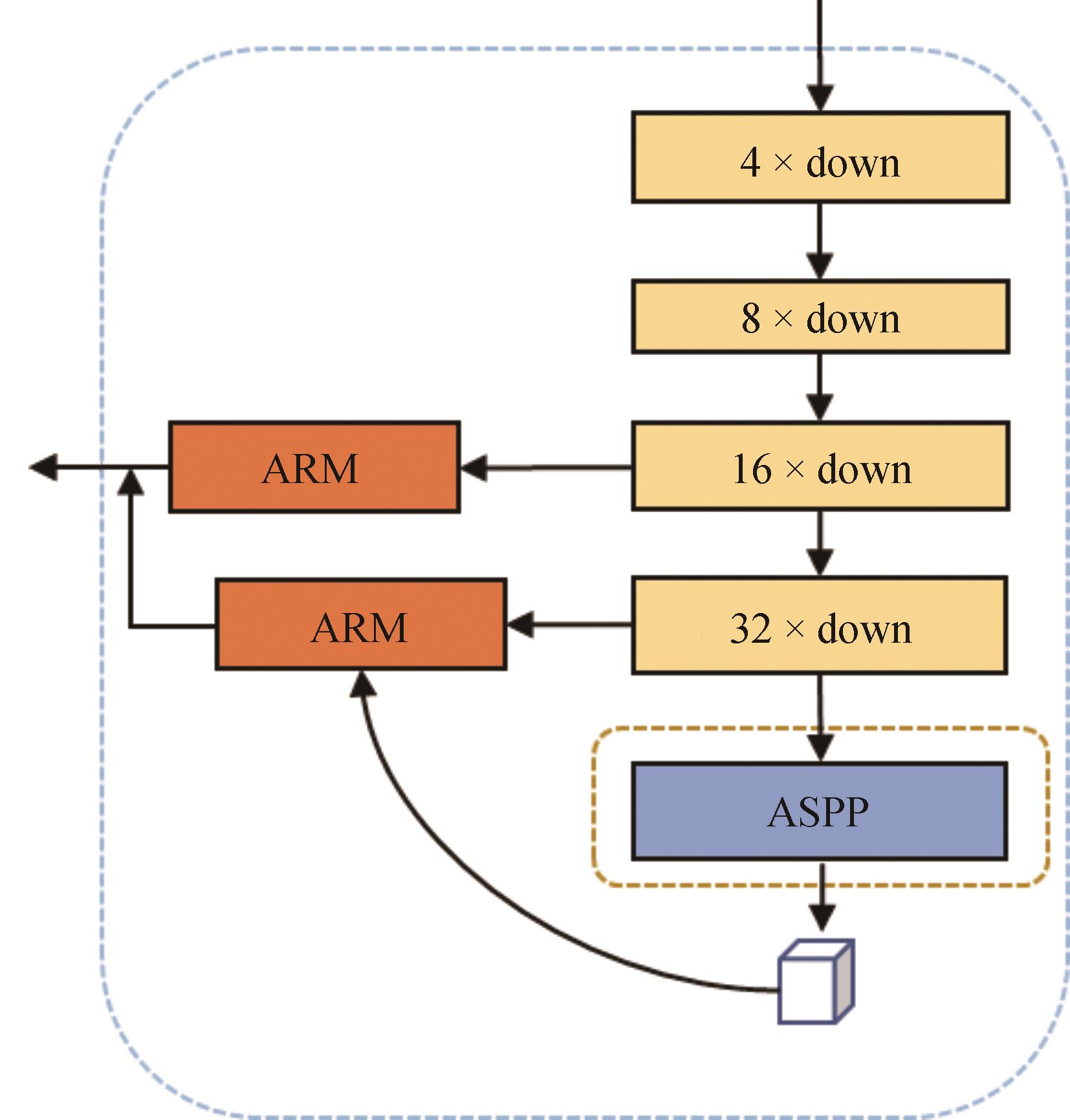
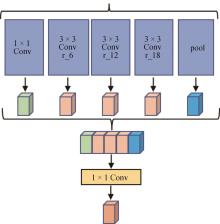
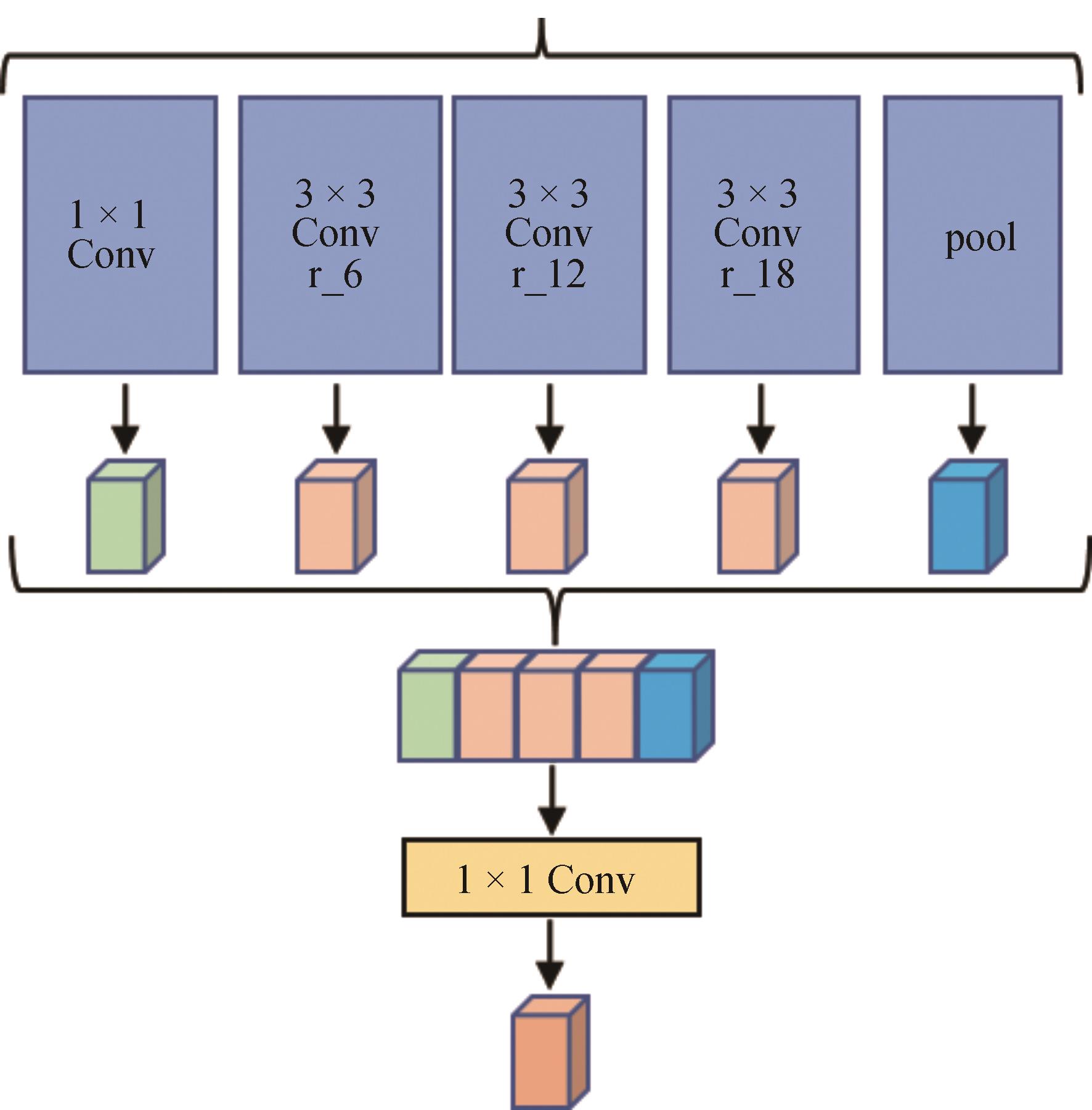
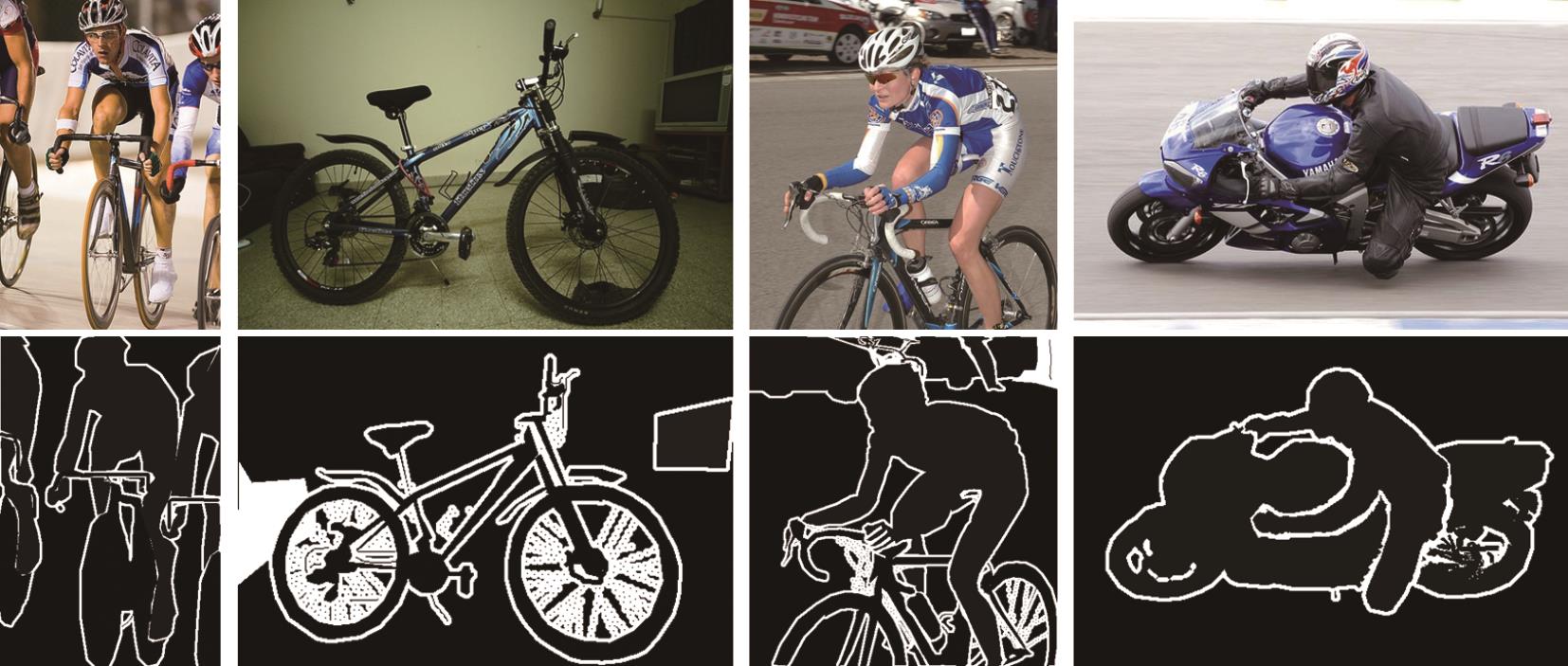
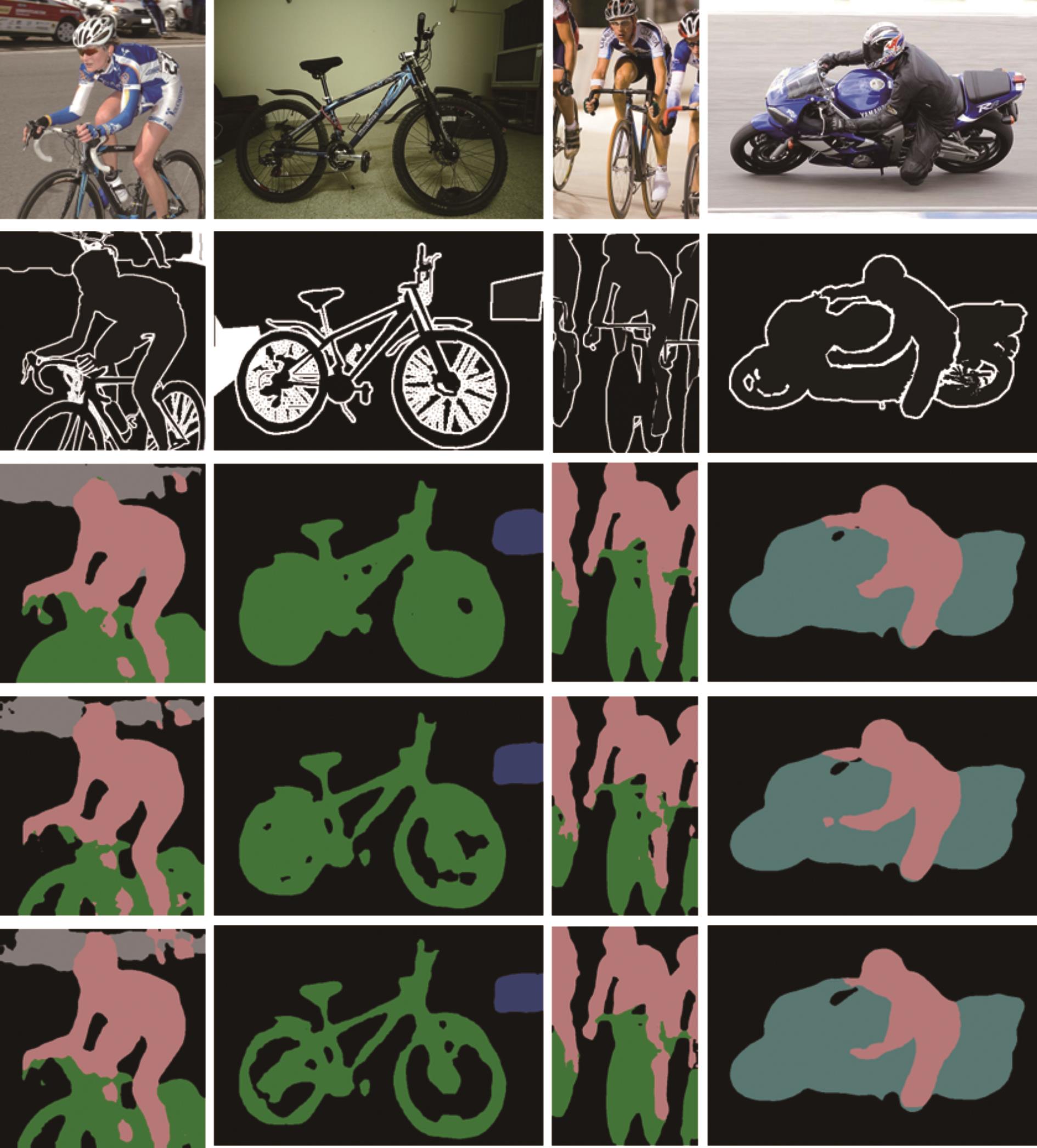
如果车辆在道路上能精确而快速地理解人和车的语义,就能在很大程度上对障碍躲避、路径规划等做出指导。现有的基于深度学习的语义分割方法存在分割速度和分割精度不能兼得等问题。本文在现有语义分割网络的基础上,通过在特征提取基准网络后添加空洞空间池化金字塔结构,可以获取图像的多尺度语义信息。实验结果表明,文中提出的A_ASPP_1和A_ASPP_2两个模块能对自动驾驶场景中常见的人和各类车辆图像进行有效的分割。对应的两种改进的网络结构虽然分割速度稍有降低,但其训练结果的平均交并比相比现有双分支网络BiSeNet分别提升了2.1和1.2个百分点。