汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1222-1234.doi: 10.19562/j.chinasae.qcgc.2023.07.013
所属专题: 车身设计&轻量化&安全专题2023年
张雷,关可人,丁晓林( ),郭鹏宇,王震坡,孙逢春
),郭鹏宇,王震坡,孙逢春
收稿日期:2022-12-08
修回日期:2023-01-03
出版日期:2023-07-25
发布日期:2023-07-25
通讯作者:
丁晓林
E-mail:dingxiaolin@bit.edu.cn
Lei Zhang,Keren Guan,Xiaolin Ding(),Pengyu Guo,Zhenpo Wang,Fengchun Sun
Received:2022-12-08
Revised:2023-01-03
Online:2023-07-25
Published:2023-07-25
Contact:
Xiaolin Ding
E-mail:dingxiaolin@bit.edu.cn
摘要:
准确的路面附着系数估计是车辆主动安全控制的前提。首先,建立了单轮动力学模型,利用卡尔曼滤波实现了轮胎纵向力精准估计,并结合魔术轮胎模型建立了基于粒子滤波的路面附着系数估计器;其次,提出了基于图像识别的前向路面附着系数预测方法,通过DeeplabV3+、语义分割网络和MobilNetV2轻量化卷积神经网络实现路面分割和路面类型辨识,并利用查表获取前向路面附着系数。最后,建立了图像识别与动力学估计时空同步方法和融合规则,实现了两种估计方法的有效关联与可靠融合。CarSim-Simulink联合仿真表明,本文所提出的基于图像识别与动力学融合的方法可有效提高不同工况下的路面附着系数估计精度。
张雷, 关可人, 丁晓林, 郭鹏宇, 王震坡, 孙逢春. 基于图像识别与动力学融合的路面附着系数估计方法[J]. 汽车工程, 2023, 45(7): 1222-1234.
Lei Zhang, Keren Guan, Xiaolin Ding, Pengyu Guo, Zhenpo Wang, Fengchun Sun. Tire-Road Friction Estimation Method Based on Image Recognition and Dynamics Fusion[J]. Automotive Engineering, 2023, 45(7): 1222-1234.
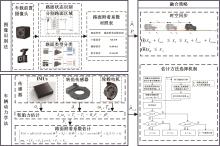
图1
图像识别与动力学融合的路面附着系数估计方法"
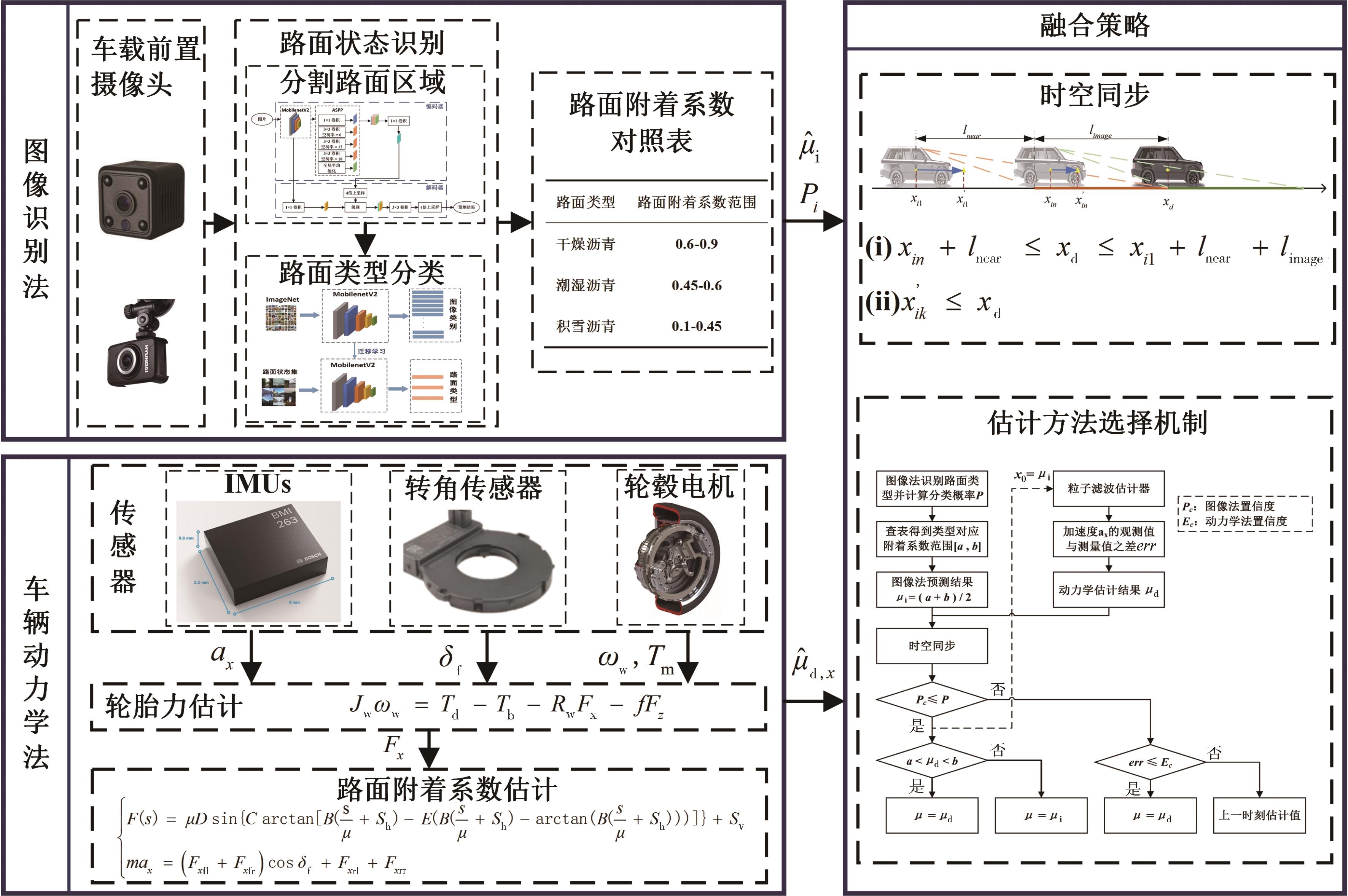
图2
单轮动力学模型"
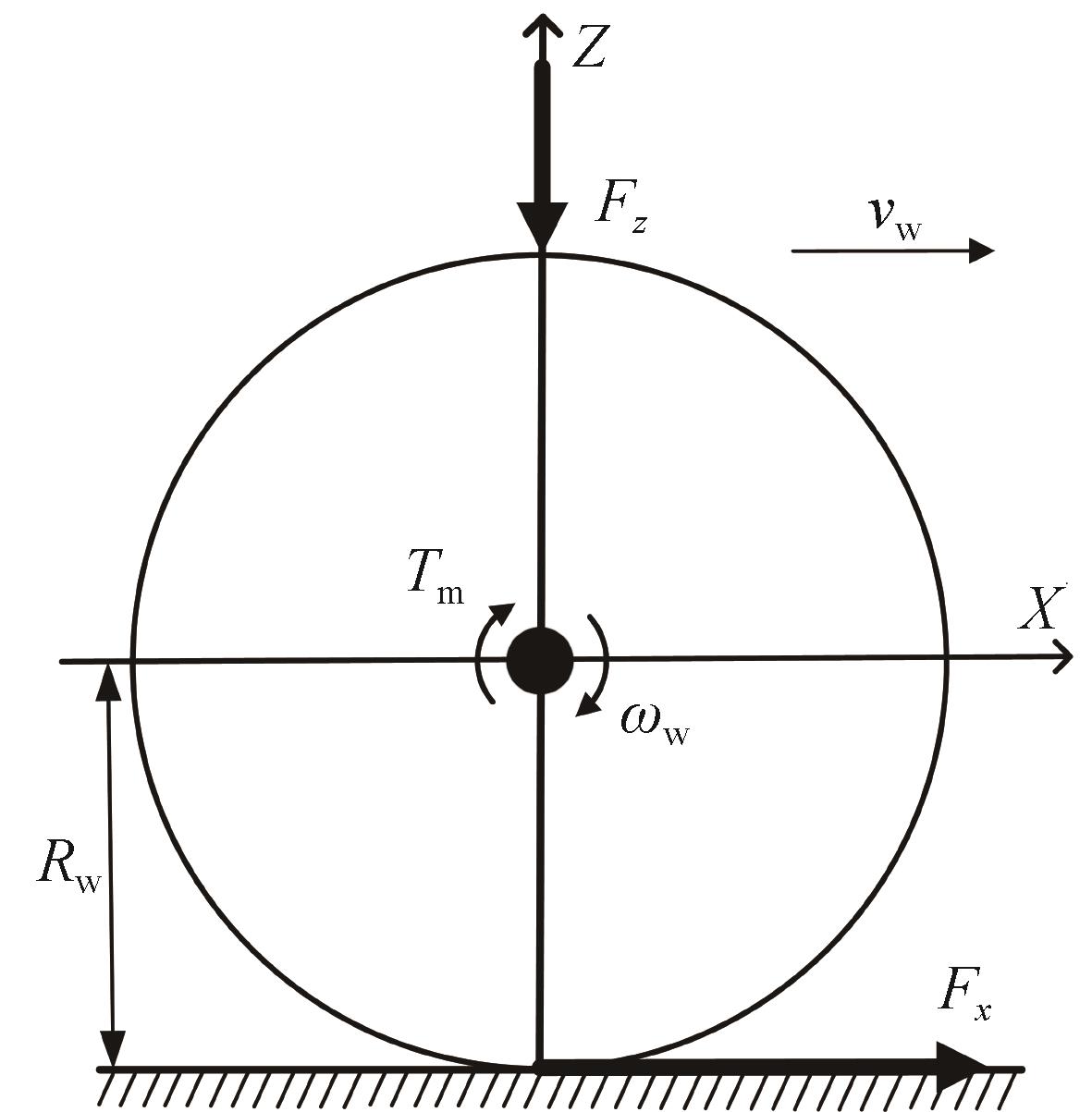

图3
DeeplabV3+网络结构"

表1
MobileNetV2网络结构"
| 输入 | 操作 | 扩张 因子 | 输出通道数 | 模块重复次数 | 步长 |
|---|---|---|---|---|---|
| 2242×32 | Conv2d | 32 | 1 | 2 | |
| 1122×32 | Bottleneck | 1 | 16 | 1 | 1 |
| 1122×16 | Bottleneck | 6 | 24 | 2 | 2 |
| 562×24 | Bottleneck | 6 | 32 | 3 | 2 |
| 282×32 | Bottleneck | 6 | 64 | 4 | 2 |
| 142×64 | Bottleneck | 6 | 96 | 3 | 1 |
| 142×96 | Bottleneck | 6 | 160 | 3 | 2 |
| 72×160 | Bottleneck | 6 | 320 | 1 | 1 |
| 72×320 | Conv2d 1×1 | 1 280 | 1 | 1 | |
| 72×1280 | Avgpool 7×7 | 1 | |||
| 1×1×1280 | Conv2d 1×1 | k |
表2
路面类型-路面附着系数对照表"
| 路面类型 | 路面附着系数范围 |
|---|---|
| 干燥沥青 | 0.6-0.9 |
| 潮湿沥青 | 0.45-0.6 |
| 积雪沥青 | 0.1-0.45 |
表3
软硬件配置"
| 软硬件名称 | 配置 |
|---|---|
| 操作系统 | Windows11(64位) |
| 编程语言 | Python3.9 |
| 开发框架 | PyTorch |
| CPU | AMD R7-6800HS |
| GPU | NVIDA3050 |
| CUDA | 11.7 |
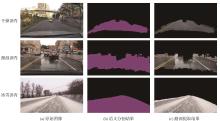
图4
路面区域语义分割结果"
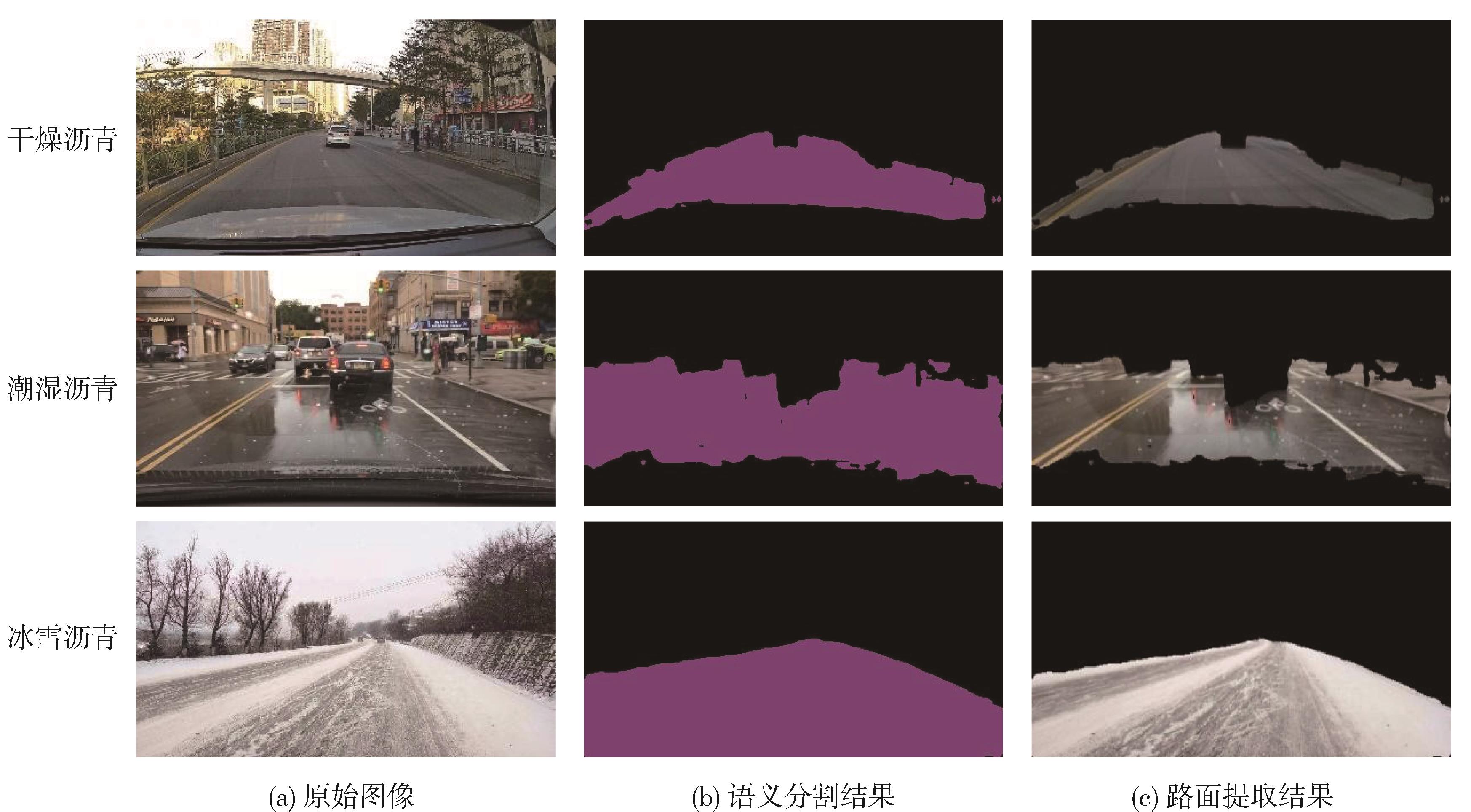
图5
MobileNetV2迁移训练流程图"

图6
时空同步示意图"

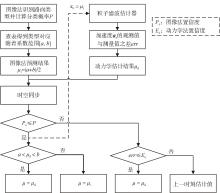
图7
基于图像识别和基于动力学的路面附着系数估计融合机制流程图"

表4
车辆模型参数"
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 1 230 |
| 质心到前轴距离a/m | 1.040 |
| 质心到后轴距离b/m | 1.560 |
| 转动惯量Iz /(kg?m2) | 1 343.1 |
| 车轮滚动半径Rw/mm | 298 |
| 车轮转动惯量Jw/(kg?m2) | 0.6 |
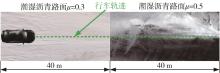
图8
对接路面1示意图"
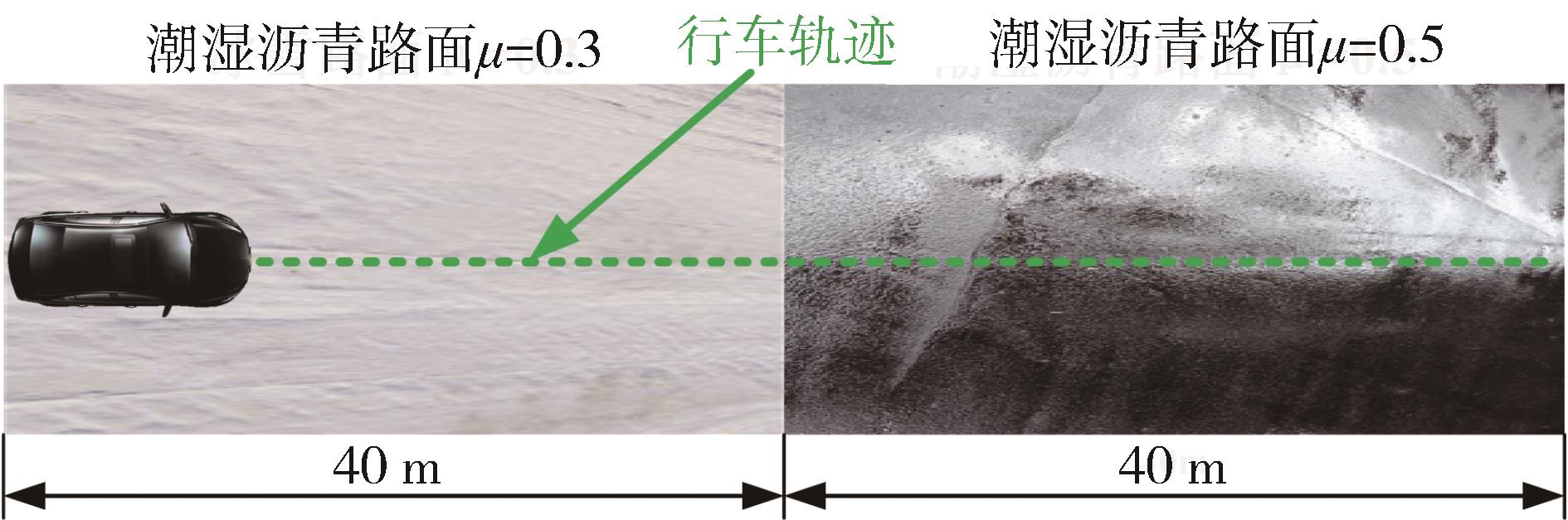

图9
车辆动力学参数"
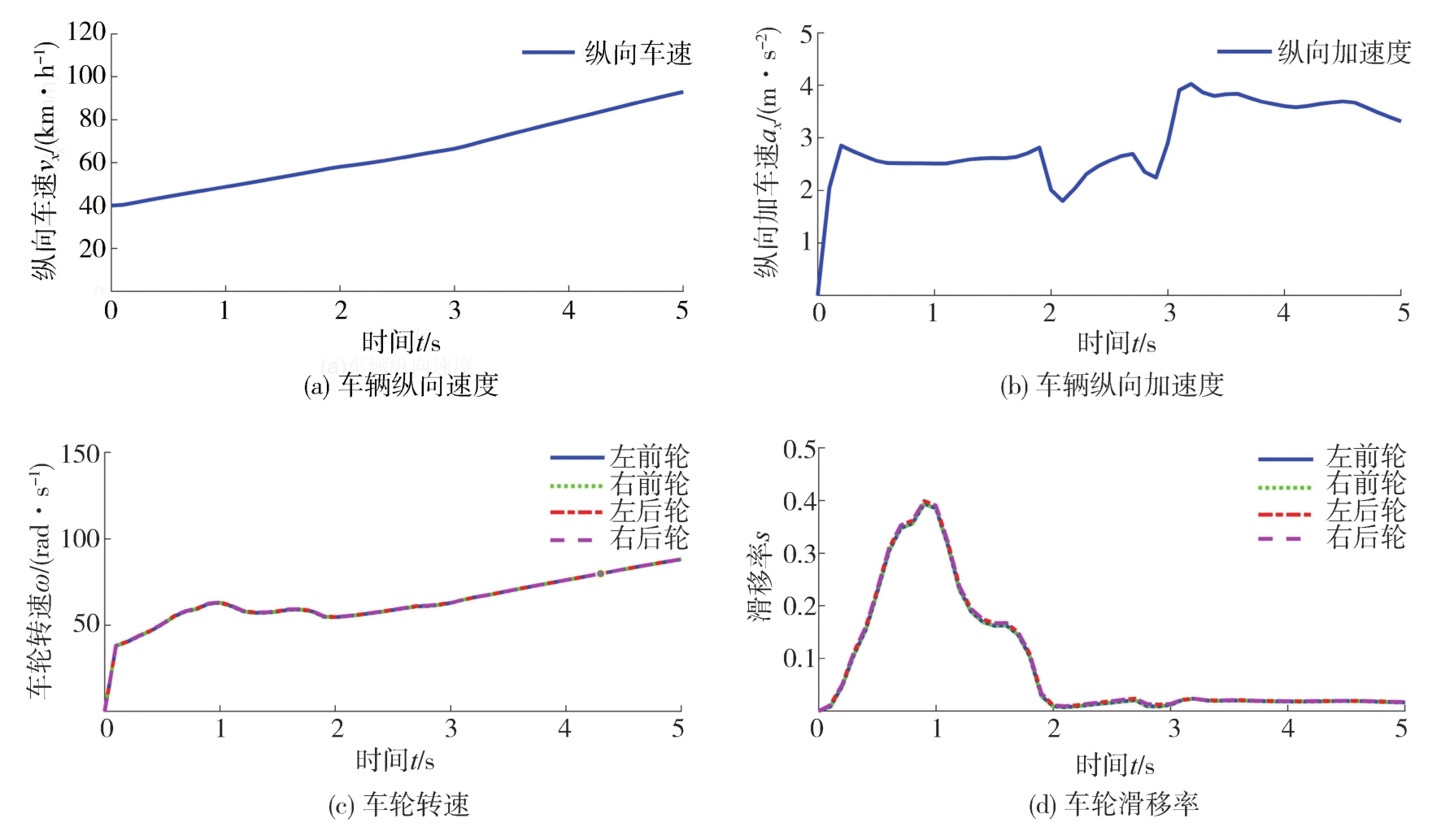
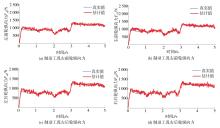
图10
轮胎纵向力估计结果"


图11
路面附着系数估计结果"
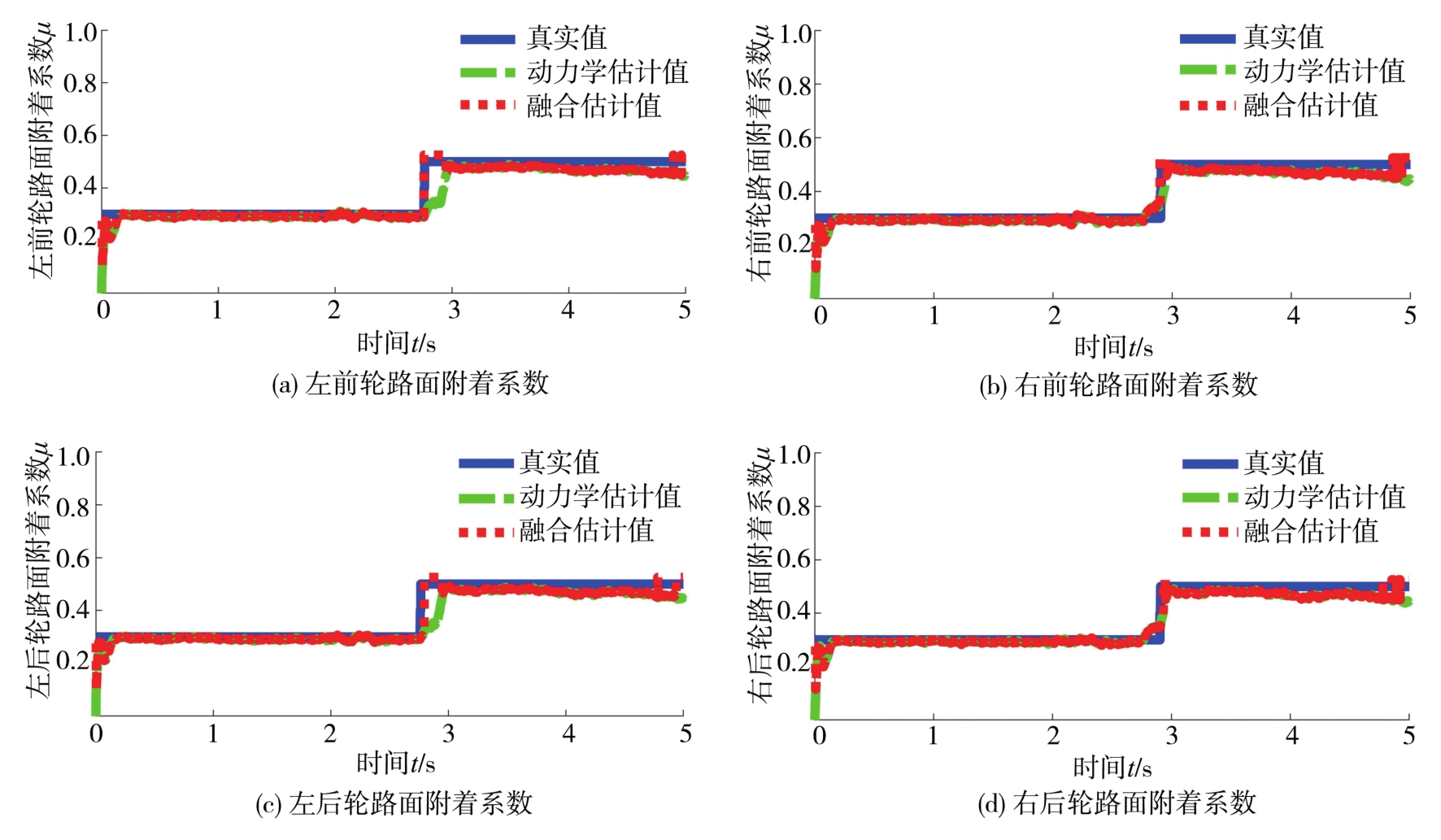
图12
对接路面2示意图"
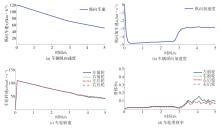
图13
车辆动力学参数"
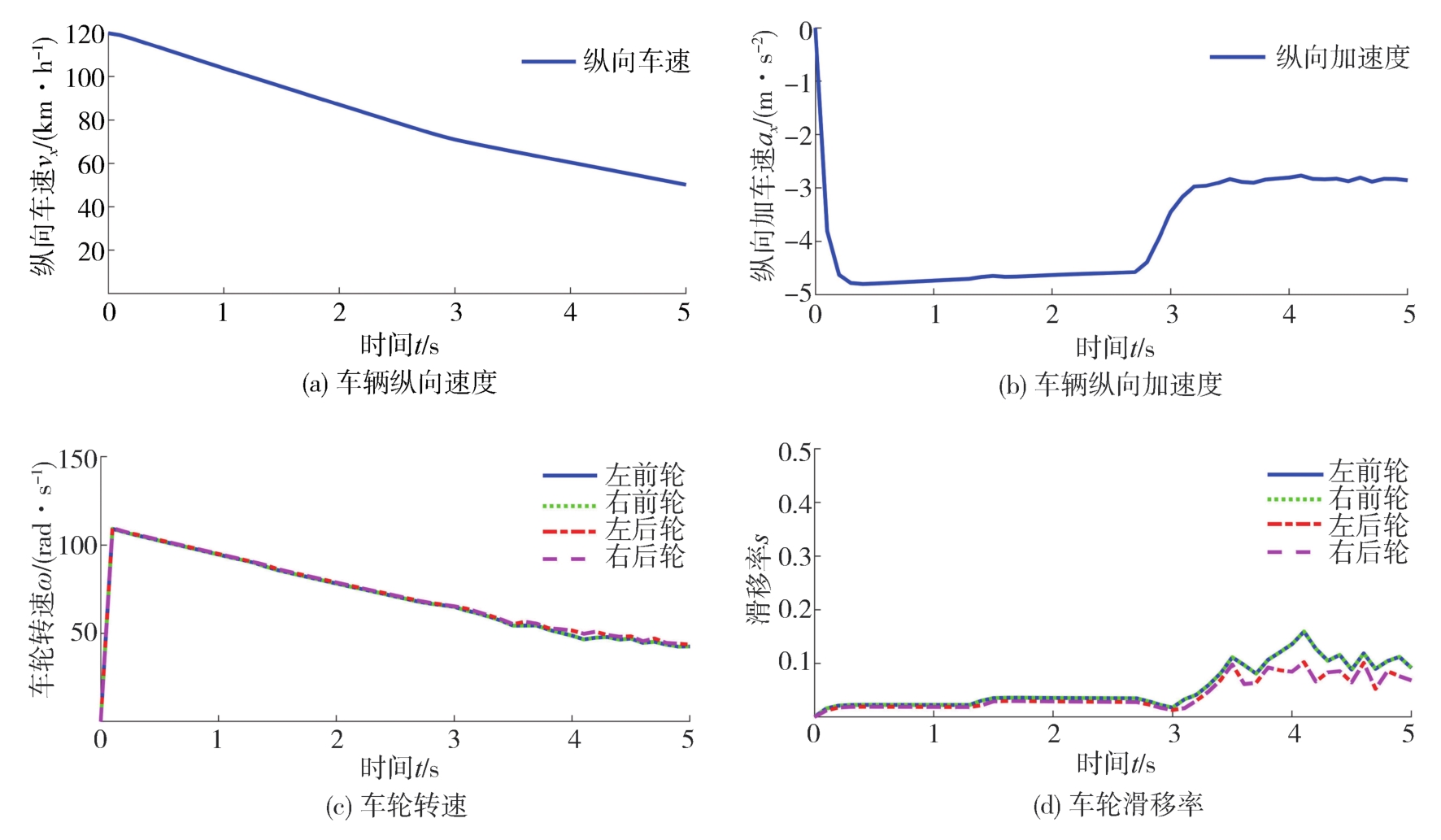
图14
轮胎纵向力估计结果"

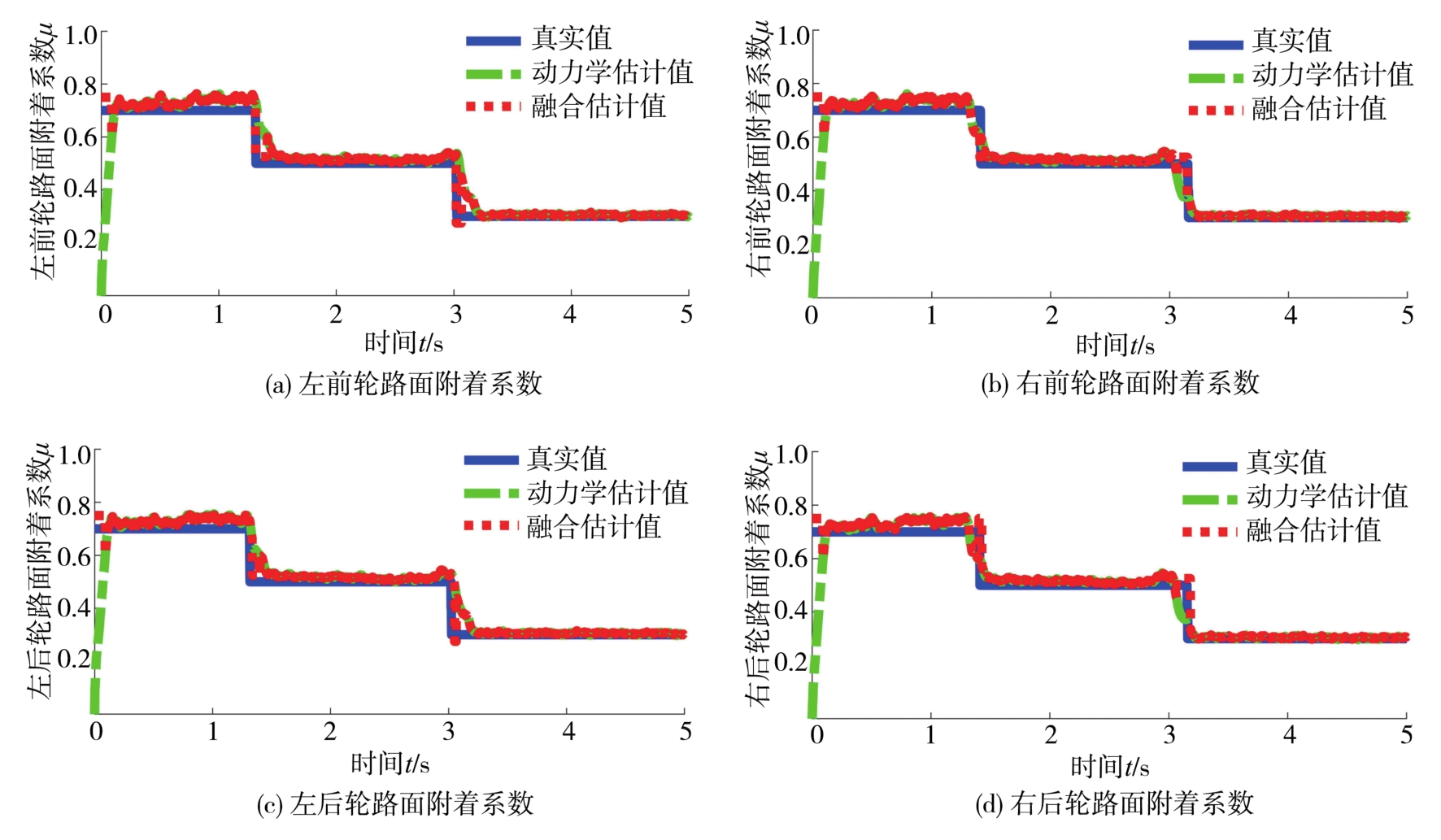
图15
路面附着系数估计结果"
| 1 | KHALEGHIAN S, EMAMI A, TAHERI S. A technical survey on tire-road friction estimation[J]. Friction, 2017, 5(2): 123-146. |
| 2 | 王震坡, 丁晓林, 张雷. 四轮轮毂电机驱动电动汽车驱动防滑控制关键技术综述[J]. 机械工程学报, 2019, 55: 99-120. |
| WANG Z P, DING X L, ZHANG L. Overview on key technologies of Acceleration slip regulation for four-wheel-independently-actuated electric vehicles[J]. Journal of Mechanical Engineering, 2019, 55: 99-120. | |
| 3 | SWART P L, LACQUET B M, BLOM C. An acoustic sensor system for determination of macroscopic surface roughness[J]. IEEE Transactions on Instrumentation and Measurement, 1996, 45(5): 879-884. |
| 4 | CASSELGREN J, ROSENDAHL S, SJÖDAHL M, et al. Road condition analysis using NIR illumination and compensating for surrounding light[J]. Optics and Lasers in Engineering, 2016, 77: 175-182. |
| 5 | YANG H J, JANG H, JEONG D S. Detection algorithm for road surface condition using wavelet packet transform and SVM[C]. The 19th Korea-Japan Joint Workshop on Frontiers of Computer Vision. IEEE, 2013: 323-326. |
| 6 | ZHAO J, WU H, CHEN L. Road surface state recognition based on svm optimization and image segmentation processing[J]. Journal of Advanced Transportation, 2017, 2017: 1-21. |
| 7 | 王海, 蔡柏湘, 蔡英凤, 等. 基于语义分割网络的路面积水与湿滑区域检测[J]. 汽车工程, 2021, 43(4): 485-491. |
| WANG H, CAI B X, CAI Y F, et al. Detection of water⁃covered and wet areas on road pavement based on semantic segmentation network[J]. Automotive Engineering, 2021, 43(4): 485-491. | |
| 8 | ŠABANOVIČ E, ŽURAULIS V, PRENTKOVSKIS O, et al. Identification of road‐surface type using deep neural networks for friction coefficient estimation[J]. Sensors, 2020, 20(3): 612-628. |
| 9 | NOLTE M, KISTER N, MAURER M. Assessment of deep convolutional neural networks for road surface classification[C]. 2018 21st International Conference on Intelligent Transportation Systems. IEEE, 2018: 381-386. |
| 10 | RENUKA D S M, SUDEEPINI D. Road surface detection using FMCW 77GHz automotive RADAR using MFCC[C]. 2021 6th International Conference on Inventive Computation Technologies. IEEE, 2021: 794-799. |
| 11 | 余卓平, 曾德全, 熊璐, 等. 基于激光雷达的无人车路面附着系数估计[J]. 华中科技大学学报, 2019, 47(7): 124-127. |
| YU Z P, ZENG D Q, XIONG L, et al. Road adhesion coefficient estimation for unmanned vehicle based on lidar[J]. J.Huazhong Univ.of Sci.& Tech, 2019, 47(7): 124-127. | |
| 12 | HOLZMANN F, BELLINO M, SIEGWART R, et al. Predictive estimation of the road-tire friction coefficient[C]. 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control. IEEE, 2006: 885-890. |
| 13 | ERDOGAN G, ALEXANDER L, RAJAMANI R. Estimation of tire-road friction coefficient using a novel wireless piezoelectric tire sensor[J]. IEEE Sensors Journal, 2011, 11(2): 267-279. |
| 14 | 卢俊辉, 巫世晶. 基于车轮振动的路面实时识别研究[J]. 振动与冲击, 2008(4): 19-22. |
| LU J H, WU S J. Real-time pavement recognition based on wheel vibration[J]. Journal of Vibration and Shock, 2008(4): 19-22. | |
| 15 | GUSTAFSSON F. Slip-based tire-road friction estimation[J]. Automatica, 1997, 33(6): 1087-1099. |
| 16 | ONO E, ASANO K, SUGAI M, et al. Estimation of automotive tire force characteristics using wheel velocity[J]. Control Engineering Practice, 2003, 11(12): 1361-1370. |
| 17 | 袁朝春, 张龙飞, 陈龙, 等. 路面峰值附着系数辨识算法研究[J]. 汽车工程, 2017, 39(11): 1268-1273. |
| YUAN C C, ZHANG L F, CHEN L, et al. A research on the algorithm for identifying the peak adhesion coefficient of road surface[J]. Automotive Engineering, 2017, 39(11): 1268-1273. | |
| 18 | 高博麟, 陈慧, 谢书港, 等. 分布式电驱动车车速及路面附着系数融合估计[J]. 汽车工程, 2016, 38(2): 216-220. |
| GAO B L, CHEN H, XIE S G, et al. Velocity and road friction coefficient fusion estimation of distributed electric drive vehicle[J]. Automotive Engineering, 2016, 38(2): 216-220. | |
| 19 | CHENG Q, CORREA-VICTORINO A, CHARARA A. A new nonlinear observer using unscented Kalman filter to estimate sideslip angle, lateral tire road forces and tire road friction coefficient[C]. 2011 IEEE Intelligent Vehicles Symposium, Proceedings. IEEE, 2011: 709-714. |
| 20 | 李刚, 解瑞春, 卫绍元, 等. 基于双容积卡尔曼滤波的车辆状态与路面附着系数估计[J]. 中国科学:技术科学, 2015, 45(4): 403-414. |
| LI G, XIE R C, WEI S Y, et al. Estimation of vehicle state and road tire friction coefficient based on dual cubature Kalman filter[J]. Sci Sin Tech, 2015, 45(4): 403-414. | |
| 21 | 熊璐, 金达, 冷搏, 等. 考虑复杂激励条件的分布式驱动电动汽车路面附着系数自适应估计方法[J]. 机械工程学报, 2020, 56(18): 123-133. |
| XIONG L, JIN D, LENG B, et al. Adaptive tire-road friction estimation method for distributed drive electric vehicles considering multiple road excitations[J]. Journal of Mechanical Engineering, 2020, 56(18): 123-133. | |
| 22 | 王世峰, 都凯悦, 孟颖, 等. 基于机器学习的车辆路面类型识别技术研究[J]. 兵工学报, 2017, 38(8): 1642-2648. |
| WANG S F, DU K Y, MENG Y, et al. Machine learning-based road terrain recognition for land vehicles[J]. Acta Armamentarii, 2017, 38(8): 1642-2648. | |
| 23 | LENG B, JIN D, XIONG L, et al. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion[J]. Mechanical Systems and Signal Processing, 2021, 150: 1-15. |
| 24 | 熊璐, 金达, 冷搏, 等. 视觉辅助的分布式驱动电动汽车路面估计方法[J]. 同济大学学报, 2019, 47(S1): 99-103. |
| XIONG L, JIN D, LENG B, et al. Road friction estimation method for distributed driving electric vehicle based on machine vision assistance[J]. Journal of Tongji University, 2019, 47(S1): 99-103. | |
| 25 | 庹文坤. 多源信息融合的路面附着系数估计算法研究[D]. 石家庄:石家庄铁道大学, 2021. |
| TUO W K. Research on algorithm of road-tire adhesion coefficient estimation based on multi-source information fusion[D]. Shijiazhuang :Shijiazhuang Tiedao University, 2021. | |
| 26 | LENG B, JIN D, HOU X C, at al. Tire-road peak adhesion coefficient estimation method based on fusion of vehicle dynamics and machine vision[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 21740-21752. |
| 27 | 脱王捷. 主动安全相关的路面状况识别[D]. 重庆:重庆理工大学, 2020. |
| TUO W J. Recognition method of road condition for active safety system[D]. Chongqing :Chongqing University of Technology, 2020. | |
| 28 | 刘惠. 视觉与动力学信息融合的智能车辆路面附着系数估计[D]. 长春:吉林大学, 2021. |
| LIU H. Vision and dynamics information fusion based road adhesion coefficient estimation for intelligent vehicles[D]. Changchun:Jilin University, 2021. | |
| 29 | 何中正. 基于多传感器数据融合的路面附着系数估计[D]. 长春:吉林大学, 2021. |
| HE Z Z. Road friction coefficient estimation based on multi-sensor and data fusion[D]. Changchun:Jilin University, 2021. | |
| 30 | PACEJKA H B, BAKKER E. The magic formula tyre model[J]. Vehicle System Dynamics, 1992, 21(S1): 1-18. |
| 31 | CARPENTER J, CLIFFORDY P, FEARNHEAD P. Improved particle filter for nonlinear problems[J]. IEE Proceedings-Radar, Sonar and Navigation, 1999, 146(1): 2-7. |
| 32 | CHEN L C, ZHU Y, PAPANDREOU G, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]. The European Conference on Computer Vision. ECCV, 2018: 801-818. |
| 33 | SANDLER M, HOWARD A, ZHU M, et al. MobileNetV2: inverted residuals and linear bottlenecks[C]. 2018 IEEE/CVF Computer Society Conference on Computer Vision and Pattern Recognition. IEEE, 2018: 4510-4520. |
| 34 | LECUN Y, BOTTOU L, BENGIO Y, et al. Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86(11): 2278-2323. |
| 35 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks[J]. Communications of the ACM, 2017, 60(6): 84-90. |
| 36 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[J]. Computer Science, 2014: 1-14. |
| 37 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2016: 770-778. |
| 38 | HOWARD A G, ZHU M, CHEN B, et al. MobileNets: efficient convolutional neural networks for mobile vision applications[J]. arXiv preprint arXiv:1704.04861, 2017: 1-9. |
| 39 | HOWARD A, SANDLER M, CHEN B, et al. Searching for mobilenetv3[C]. 2019 IEEE International Conference on Computer Vision. IEEE, 2019: 1314-1324. |
| 40 | ZHANG X, ZHOU X, LIN M, et al. ShuffleNet: an extremely efficient convolutional neural network for mobile devices[C]. 2018 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. IEEE, 2018: 6848-6856. |
| 41 | MA N, ZHANG X, ZHENG H T, et al. Shufflenet V2: practical guidelines for efficient CNN architecture design[C]. The European Conference on Computer Vision. ECCV, 2018: 116-131. |
| 42 | 龚标. 典型交通事故形态车辆行驶速度技术鉴定[M]. 北京: 中国标准出版社, 2006. |
| GONG B. The speed technical evaluation for vehicles involved in representative road accidents[M]. Beijing: Standards Press of China, 2006. | |
| 43 | 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009. |
| YU Z S. Automotive theory[M]. 5th ed.Beijing: China Machine Press, 2009. | |
| 44 | CORDTS M, OMRAN M, RAMOS S, et al. The cityscapes dataset for semantic urban scene understanding[C]. 2016 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. IEEE, 2016: 3213-3223. |
| 45 | NEUHOLD G, OLLMANN T, BULO S R, et al. The mapillary vistas dataset for semantic understanding of street scenes[C]. 2017 IEEE International Conference on Computer Vision. IEEE, 2017: 5000-5009. |
| 46 | YU F, XIAN W, CHEN Y, et al. BDD100K: a diverse driving video database with scalable annotation tooling[J]. Arxiv, 2018: 1-16. |
| [1] | 金祖亮,隗寒冰,Liu Zheng,娄路,郑国峰. 基于局部窗口交叉注意力的轻量型语义分割[J]. 汽车工程, 2023, 45(9): 1617-1625. |
| [2] | 管欣,仲昭辉,詹军,奚腾龙,叶昊,高深圳,成健,廖世辉,蔡均. 基于卷积神经网络的汽车操纵稳定性试验类型识别方法[J]. 汽车工程, 2023, 45(9): 1765-1771. |
| [3] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [4] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [5] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [6] | 赵霞,李朝,付锐,葛振振,王畅. 基于深度卷积-Tokens降维优化视觉Transformer的分心驾驶行为实时检测[J]. 汽车工程, 2023, 45(6): 974-988. |
| [7] | 张新荣,王鑫,宫新乐,黄晋,黄丹,王鹏兴. 面向智能车辆的路面附着系数分段识别方法[J]. 汽车工程, 2023, 45(10): 1923-1932. |
| [8] | 黄润辉,胡立坤,苏鸣方,徐大也,陈奥然. 基于三维锥形栅格的激光点云语义分割方法[J]. 汽车工程, 2022, 44(8): 1173-1182. |
| [9] | 毕贵红,谢旭,蔡子龙,骆钊,陈臣鹏,赵鑫. 动态条件下基于深度学习的锂电池容量估计[J]. 汽车工程, 2022, 44(6): 868-878. |
| [10] | 冯润泽,江昆,于伟光,杨殿阁. 基于两阶段分类算法的中国交通标志牌识别[J]. 汽车工程, 2022, 44(3): 434-441. |
| [11] | 王大方,刘磊,曹江,赵刚,赵文硕,唐伟. 基于空洞空间池化金字塔的自动驾驶图像语义分割方法[J]. 汽车工程, 2022, 44(12): 1818-1824. |
| [12] | 王大方,尚海,曹江,王涛,夏祥腾,韩雨霖. 基于自注意力机制的自动驾驶场景点云语义分割方法[J]. 汽车工程, 2022, 44(11): 1656-1664. |
| [13] | 黄圣杰,胡满江,周云水,殷周平,秦晓辉,边有钢,贾倩倩. 动态场景下基于语义分割与运动一致性约束的车辆视觉SLAM[J]. 汽车工程, 2022, 44(10): 1503-1510. |
| [14] | 于海,邓钧君,王震坡,孙逢春. 基于卷积神经网络的逆变器故障诊断方法[J]. 汽车工程, 2022, 44(1): 142-152. |
| [15] | 夏祥腾,王大方,曹江,赵刚,张京明. 基于稀疏卷积神经网络的车载激光雷达点云语义分割方法[J]. 汽车工程, 2022, 44(1): 26-35. |
|