汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1511-1520.doi: 10.19562/j.chinasae.qcgc.2022.10.005
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
刘子龙,沈祥飞( )
)
Zilong Liu,Xiangfei Shen()
摘要:
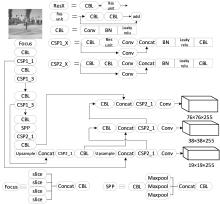
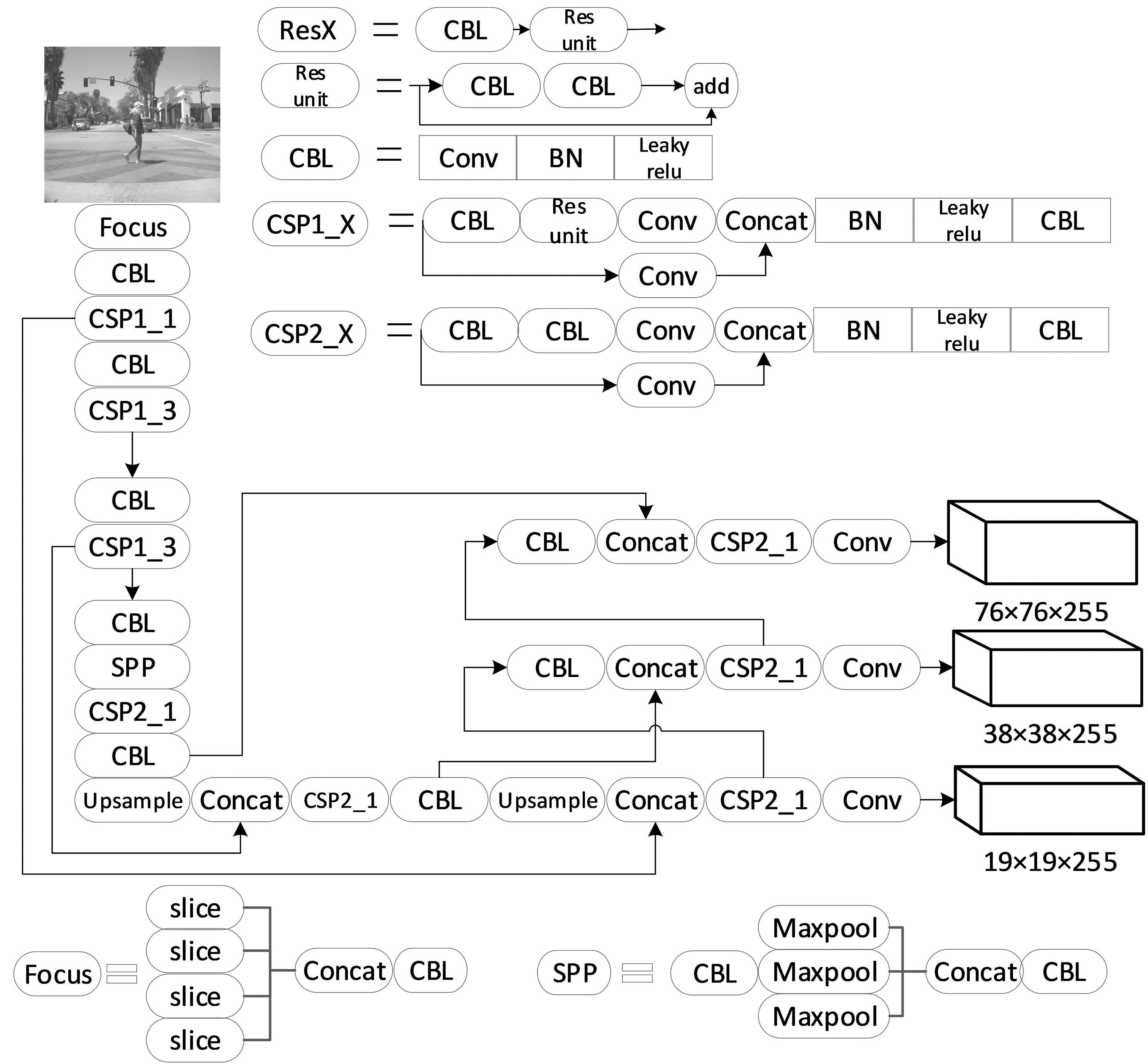
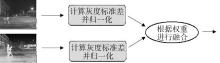
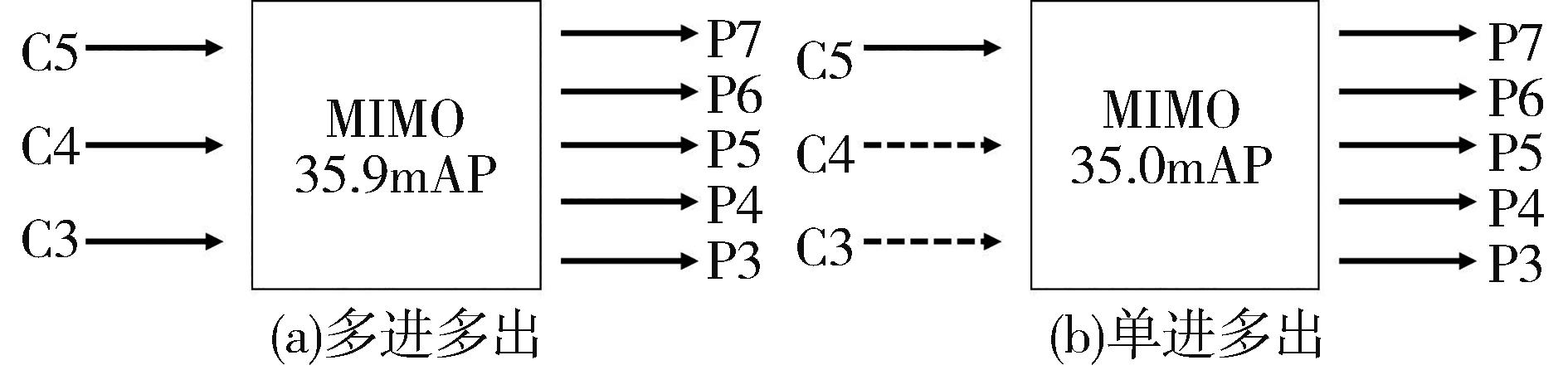
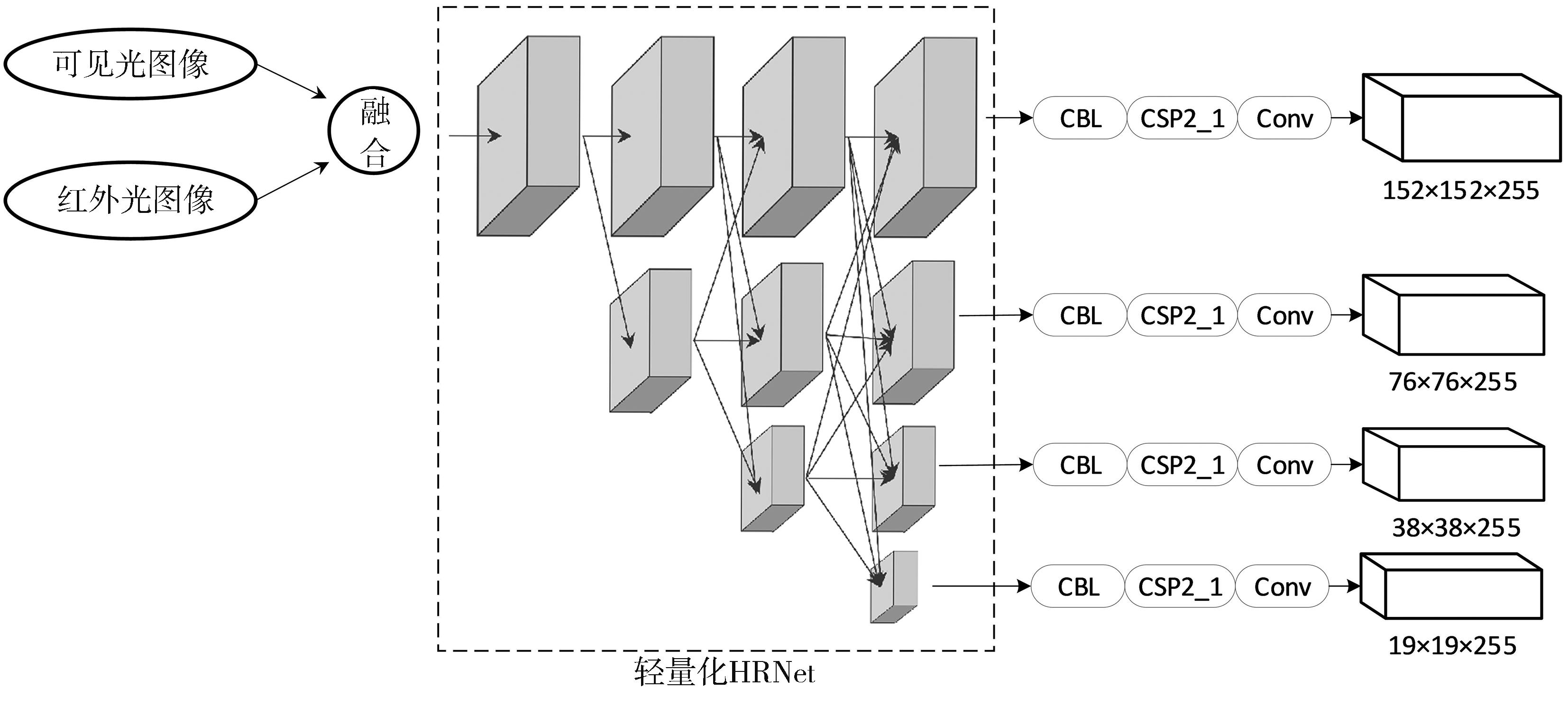
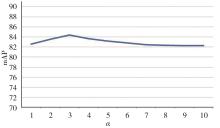
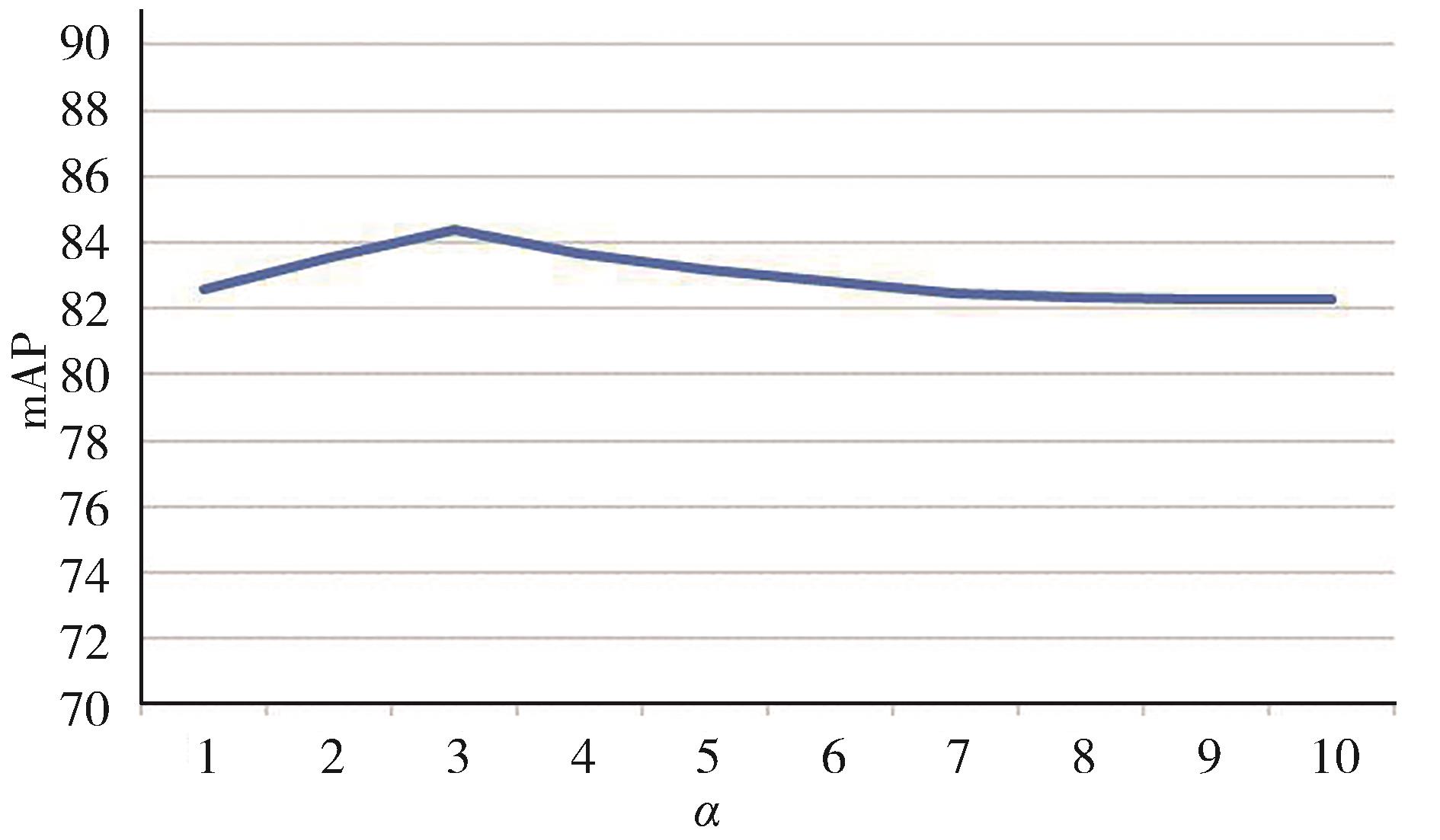
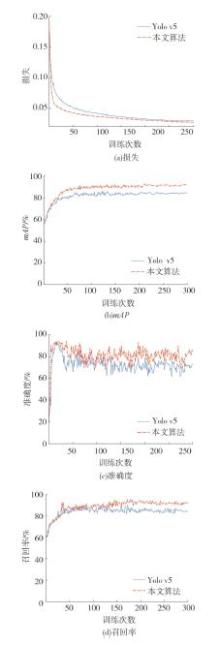
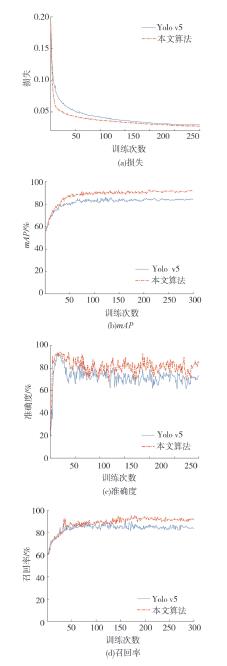
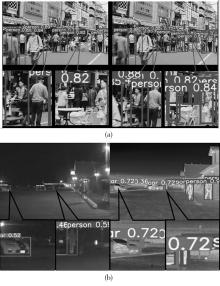
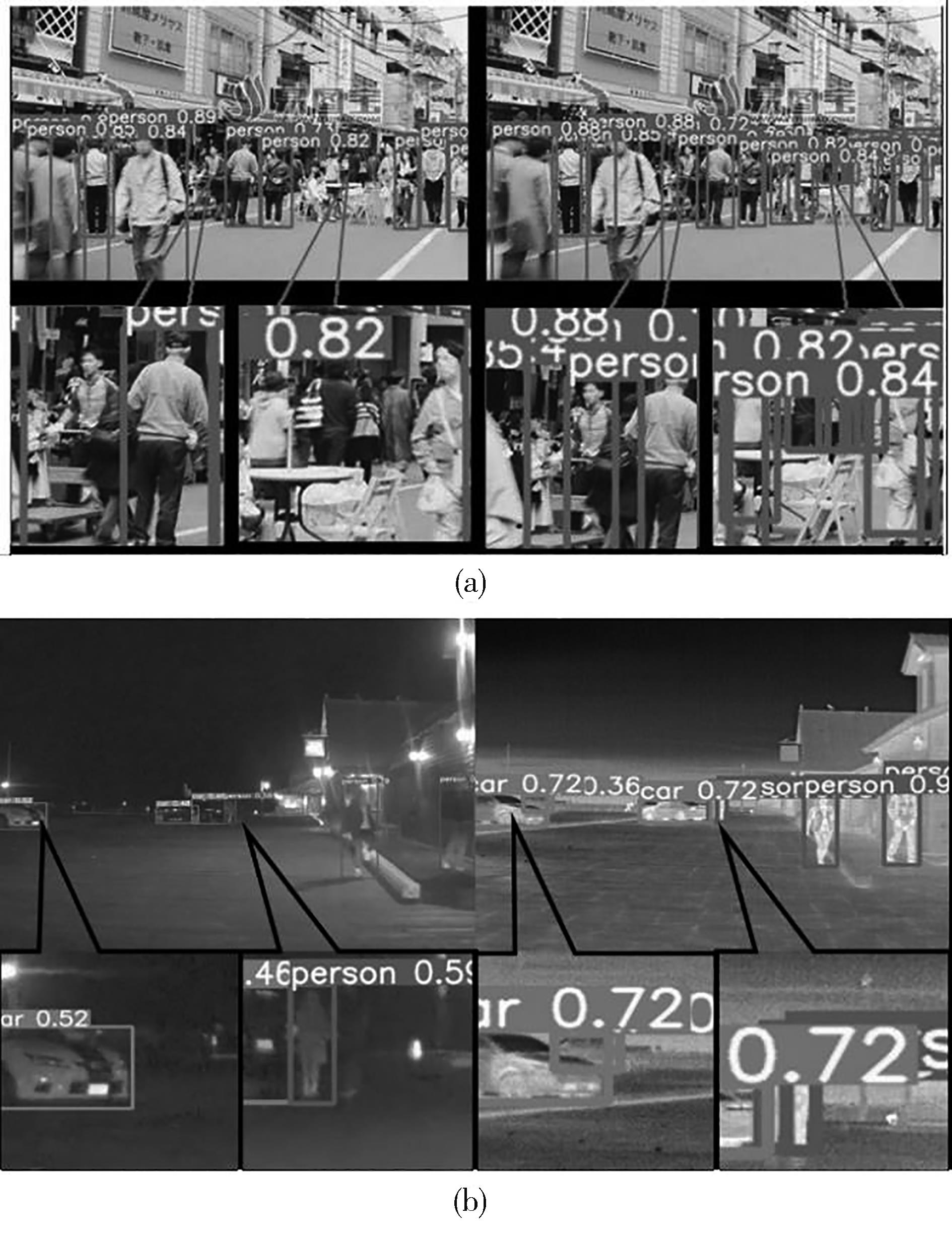
针对目前自动驾驶领域的目标检测算法在对道路小目标和密集目标进行检测的时候出现漏检的问题,提出一种融合Lite-HRNet的Yolo v5网络。首先为了获得高分辨率的特征检测图将Lite-HRNet作为Yolo v5的主干网络,以增强对小目标及密集目标的检测。为提升暗光场景下的检测性能,将红外图像与可见光图像进行动态权值融合,充分发挥可见光图像与红外图像的互补优势。由于主干网络进行了充分的特征融合,为加快检测速度取消在检测层中的特征融合结构。其次为了加快收敛速度和提高回归精度采用α-EIoU作为边界框损失函数,同时为选取针对数据集更合适的先验框,使用二分K-means算法进行聚类,并且使用小目标数据增强算法对数据集进行样本扩充。最后在flir数据集上进行对比测试,根据实验结果,提出的算法比Yolo v5在平均精度上提高了7.64%,小目标和密集目标的漏检率明显减少。