汽车工程 ›› 2021, Vol. 43 ›› Issue (4): 485-491.doi: 10.19562/j.chinasae.qcgc.2021.04.005
王海1( ),蔡柏湘1,蔡英凤2,刘泽2,孙恺3,陈龙2
),蔡柏湘1,蔡英凤2,刘泽2,孙恺3,陈龙2
Hai Wang1(),Baixiang Cai1,Yingfeng Cai2,Ze Liu2,Kai Sun3,Long Chen2
摘要:
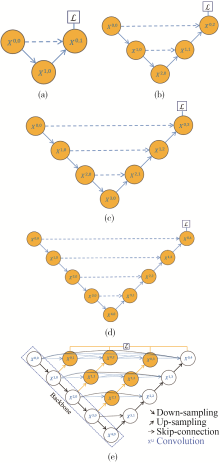
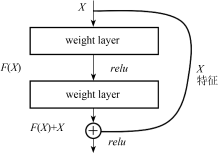
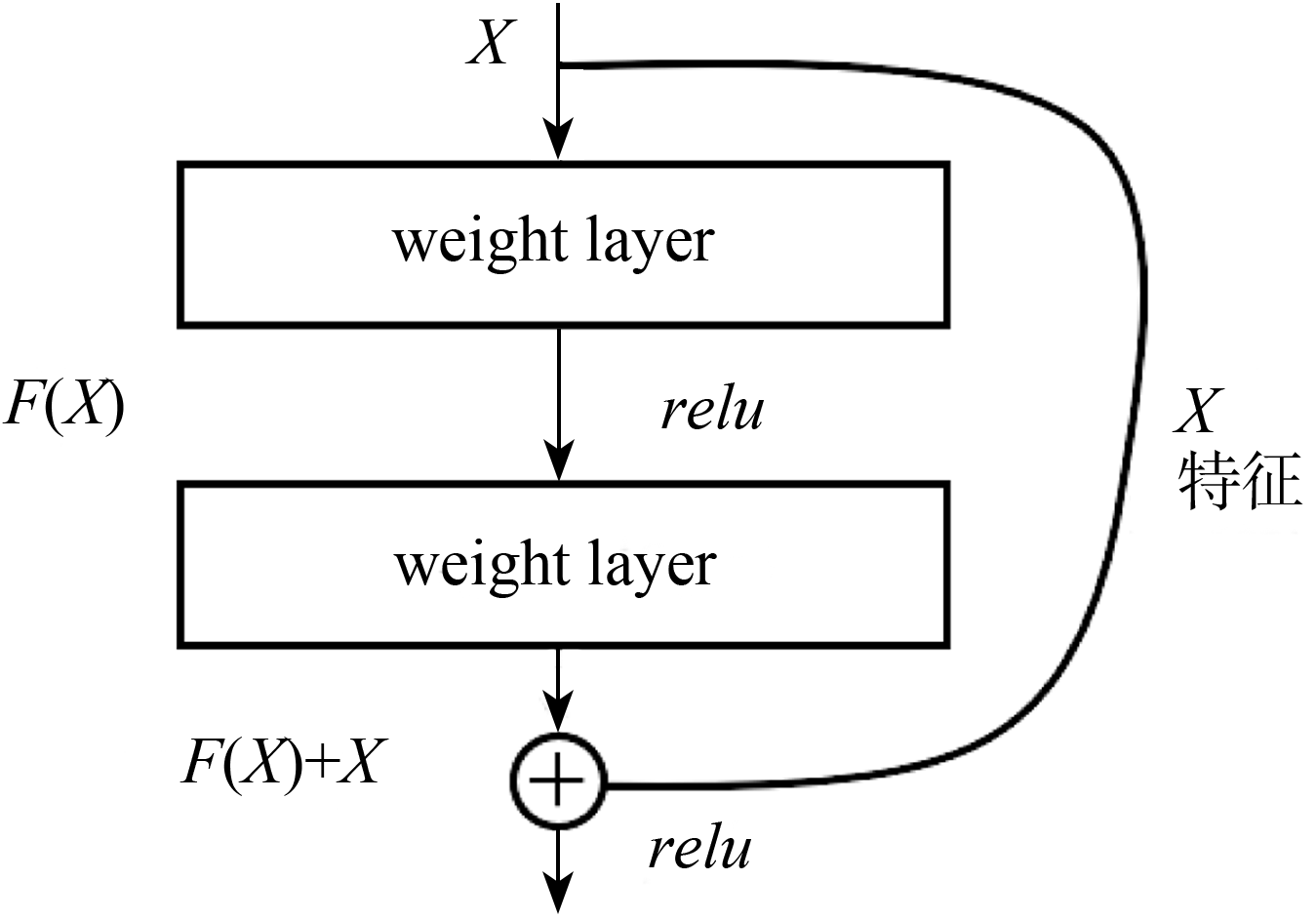
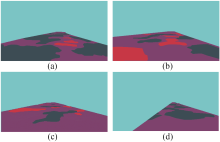
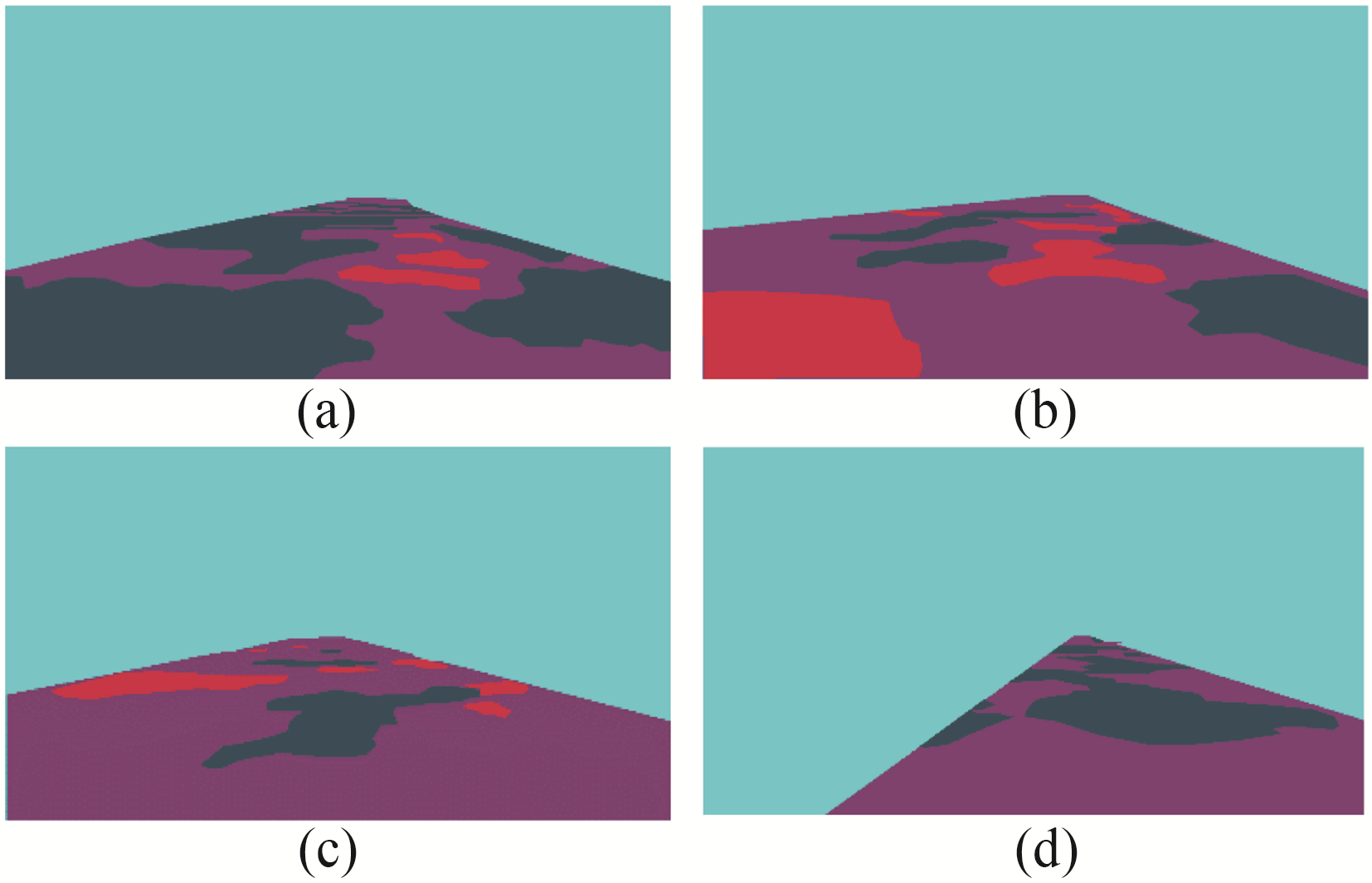
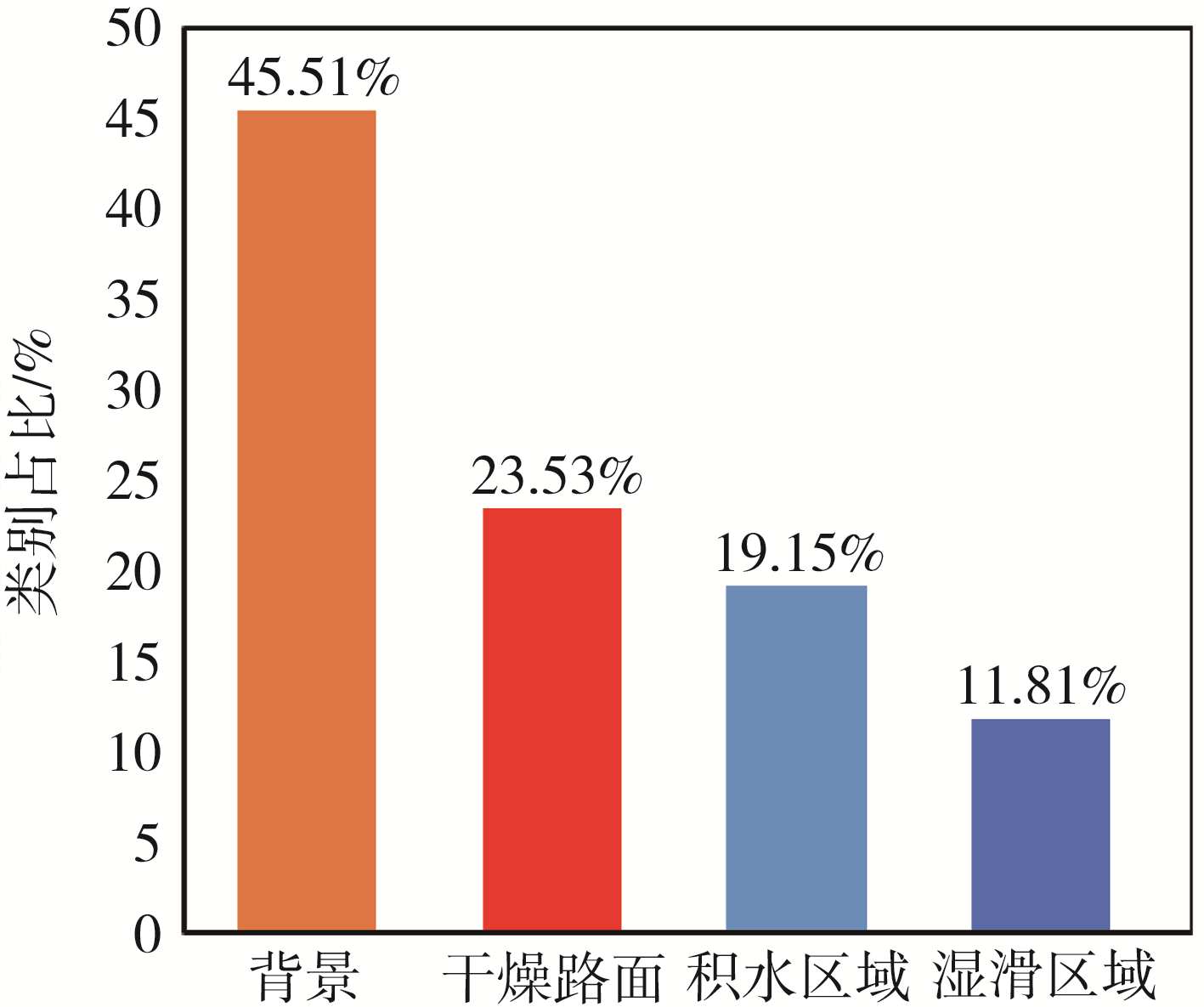
积水或湿滑路面的道路附着系数远小于干燥路面的附着系数,对交通的安全性和机动性都有很大的影响。通过及时获取路面状态信息而发出预警,可大大减小潜在伤害。本文中研究了基于图像的语义分割网络在积水和潮湿的路面状态识别中的应用,它不仅可预测未来路面状态信息,且可得到路面积水和湿滑区域的分布。该方法利用语义分割网络Res-UNet++,分割出路面的积水和湿滑区域。Res-UNet++结构包括嵌套了不同深度的编码器-解码器结构,并在网络的特征提取部分加入残差结构,从而使图像的特征更容易学习。该方法取得了平均交并比为90.07%的分割精度并克服了其它方法的缺点。