汽车工程 ›› 2022, Vol. 44 ›› Issue (2): 153-160.doi: 10.19562/j.chinasae.qcgc.2022.02.001
所属专题: 智能网联汽车技术专题-规划&控制2022年
• • 下一篇
郭景华1( ),何智飞1,罗禹贡2,李克强2
),何智飞1,罗禹贡2,李克强2
Jinghua Guo1(),Zhifei He1,Yugong Luo2,Keqiang Li2
摘要:
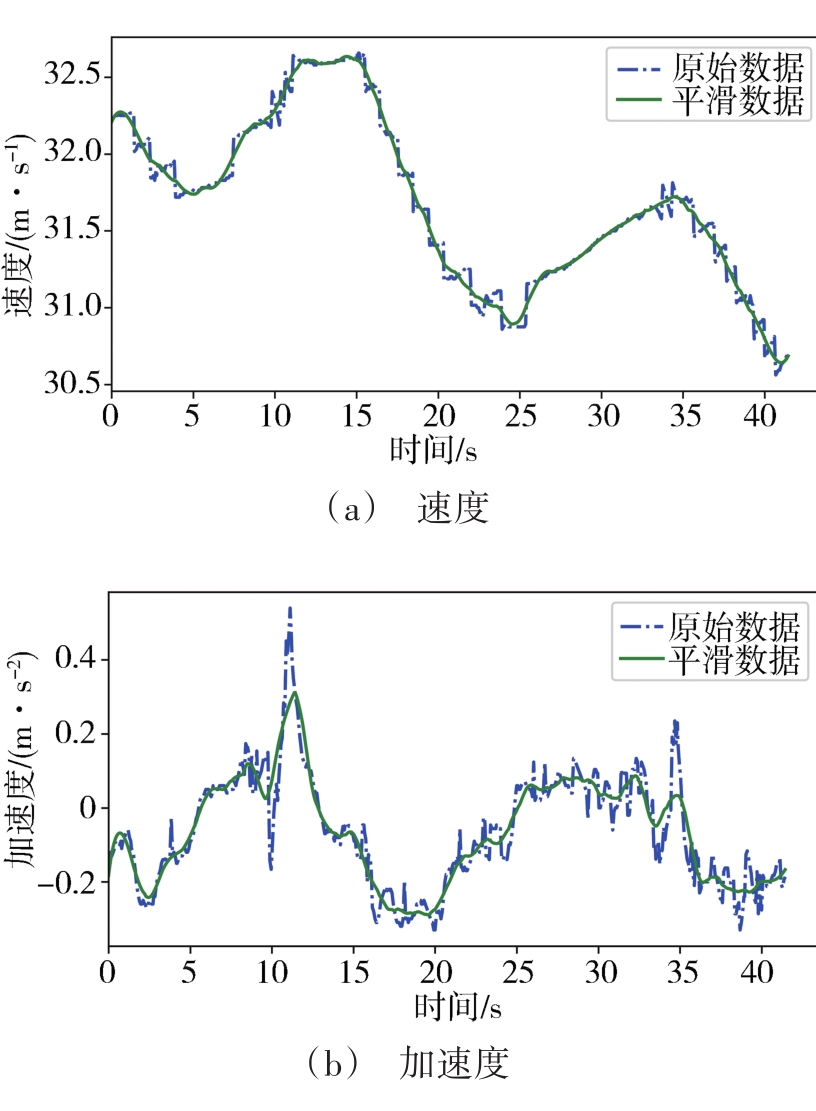
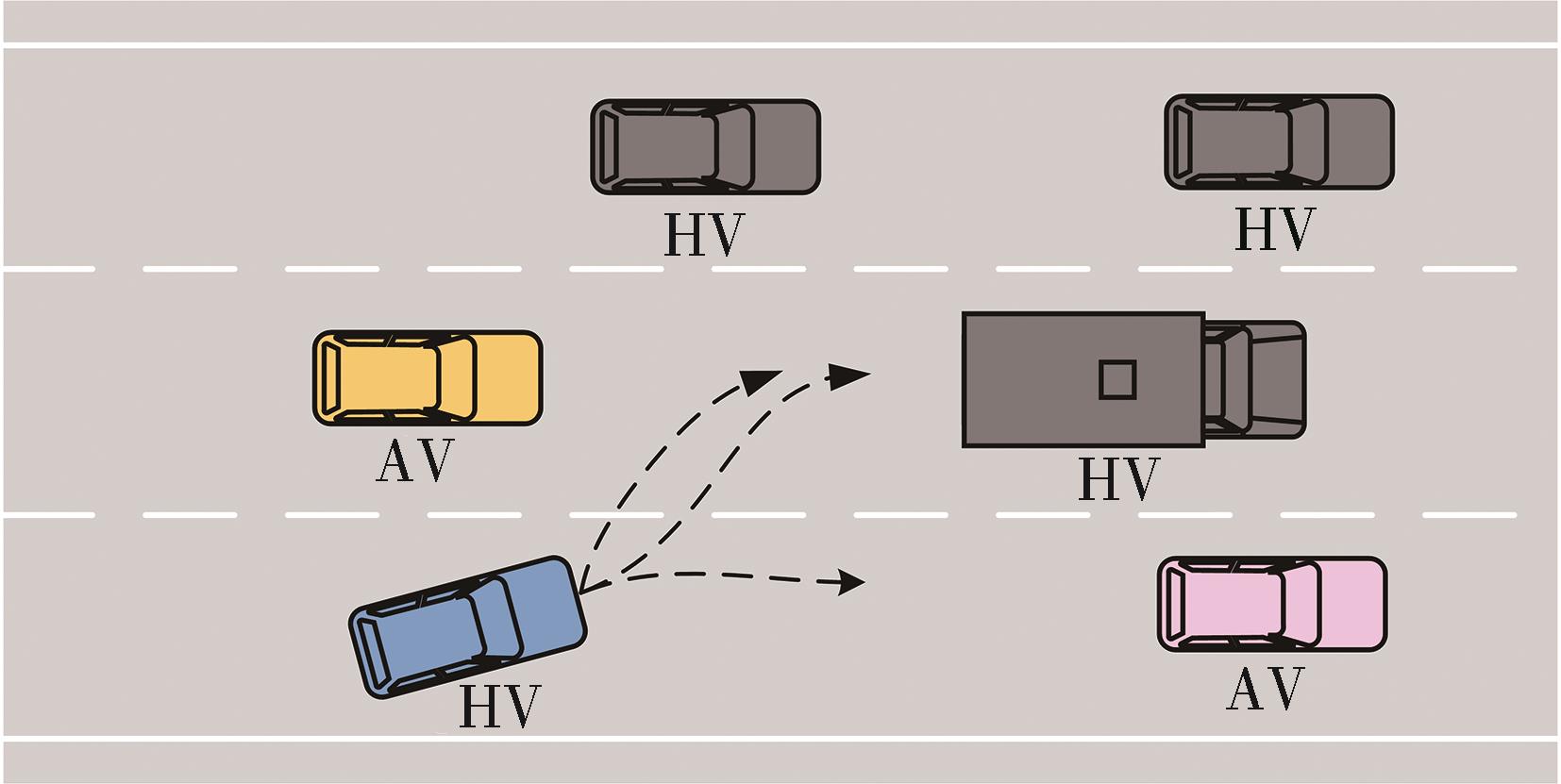
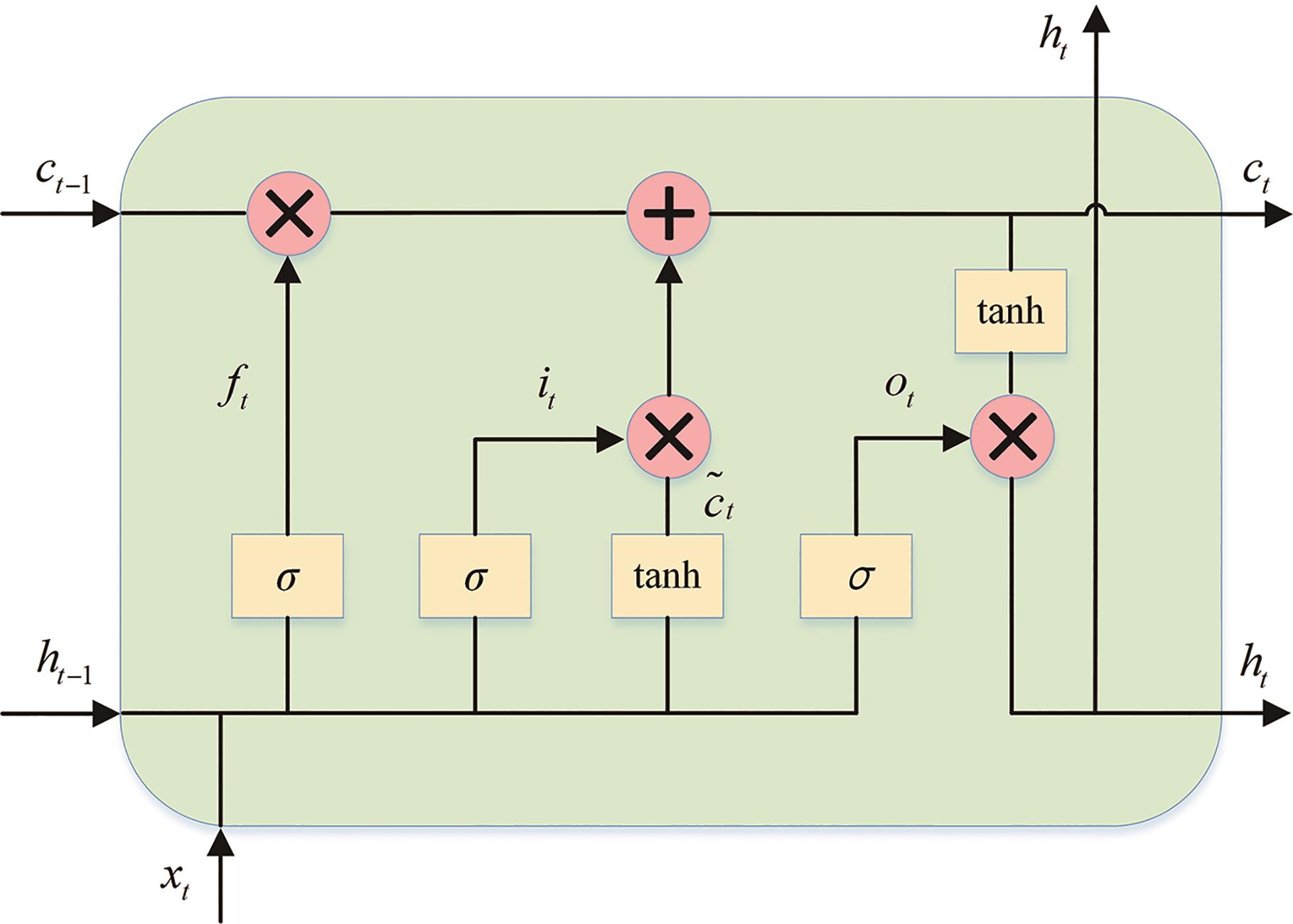
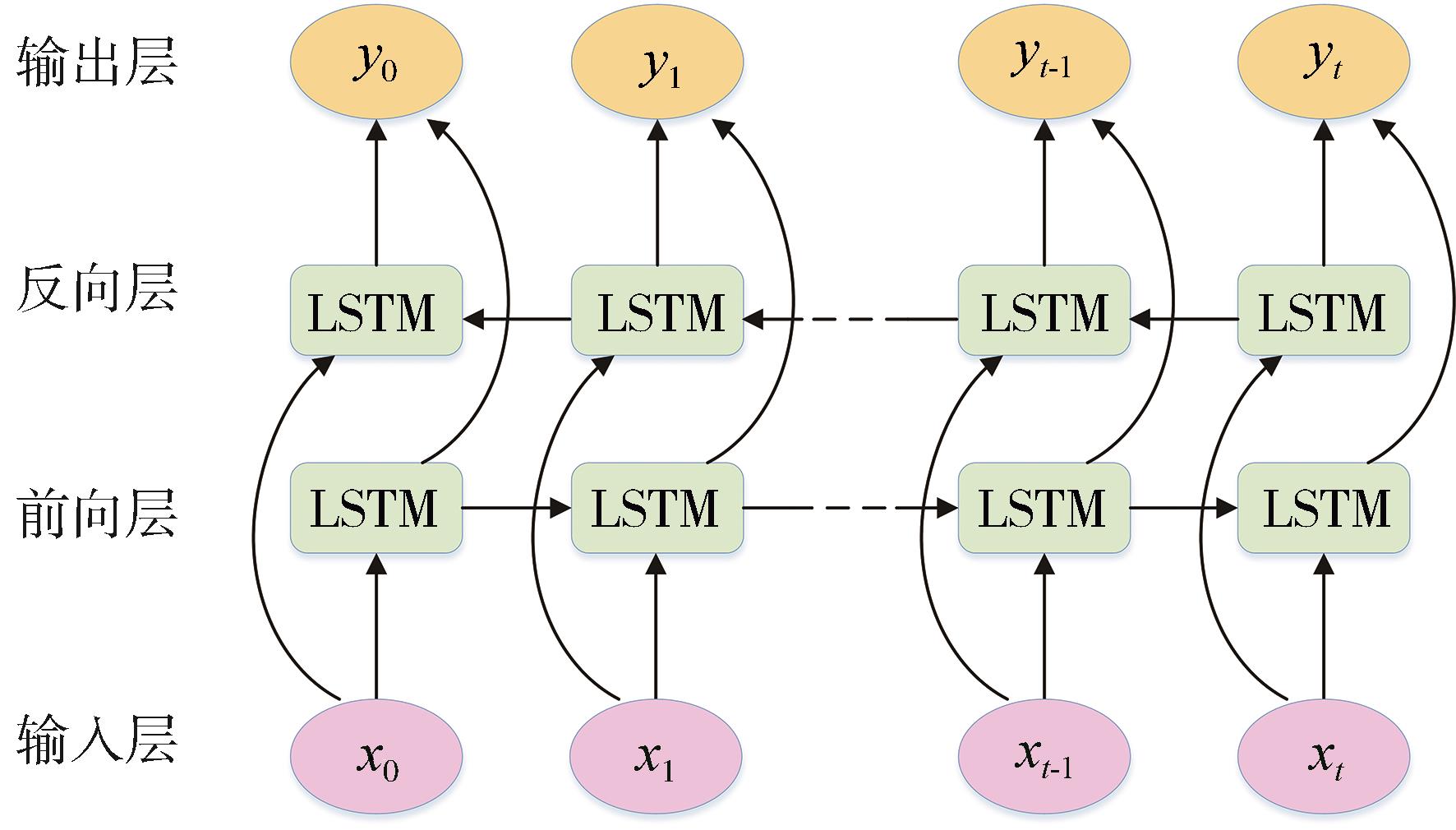
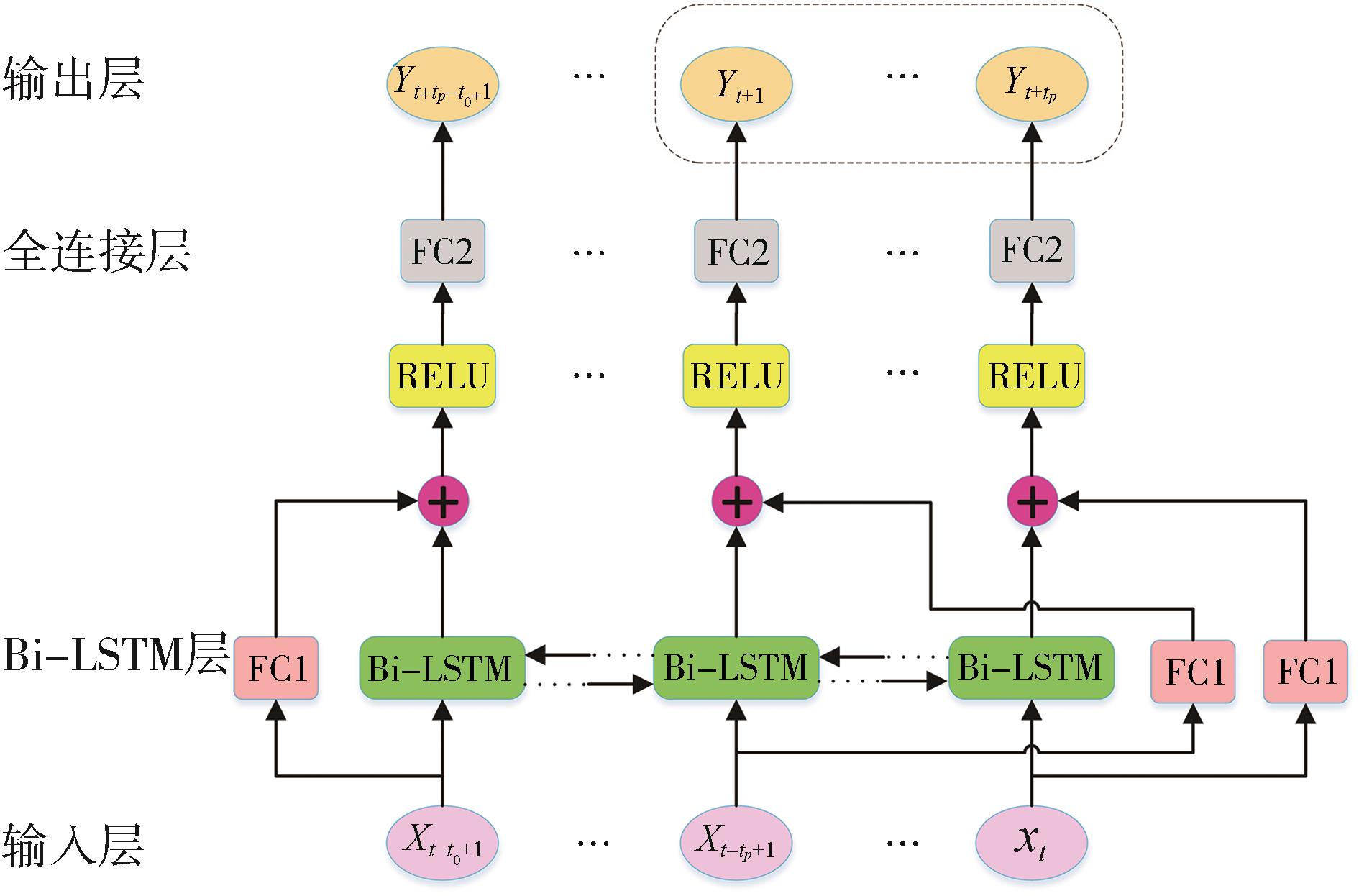
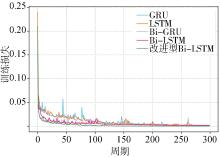
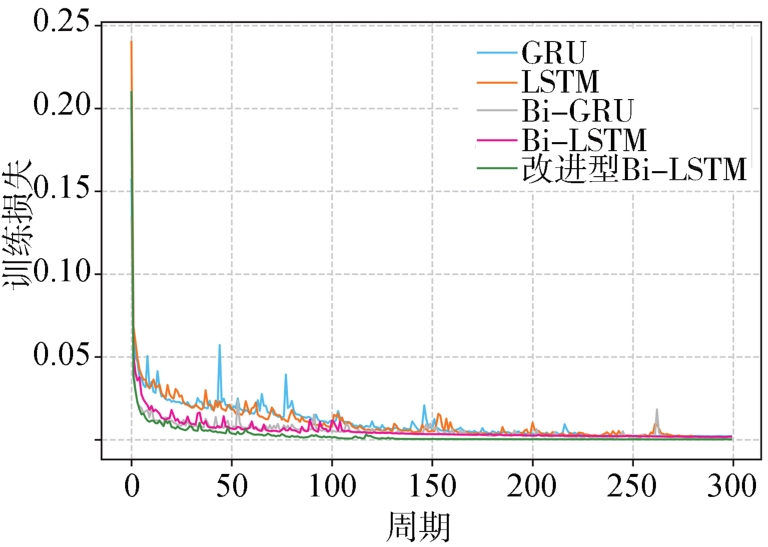
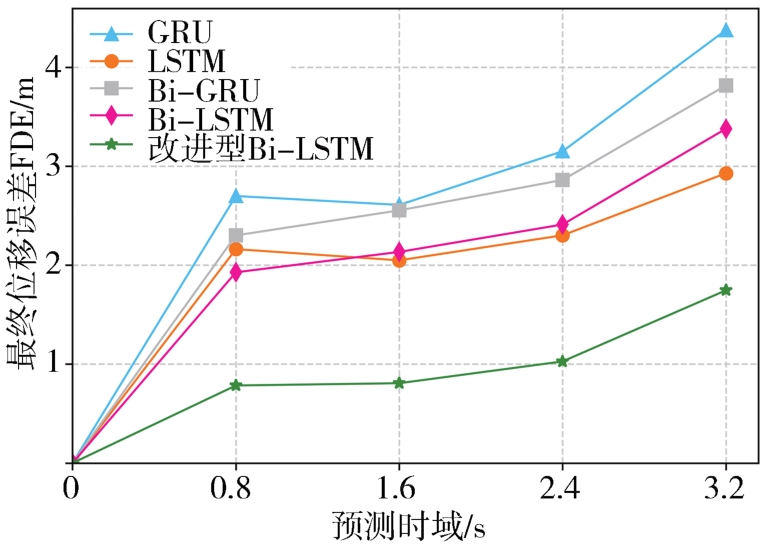
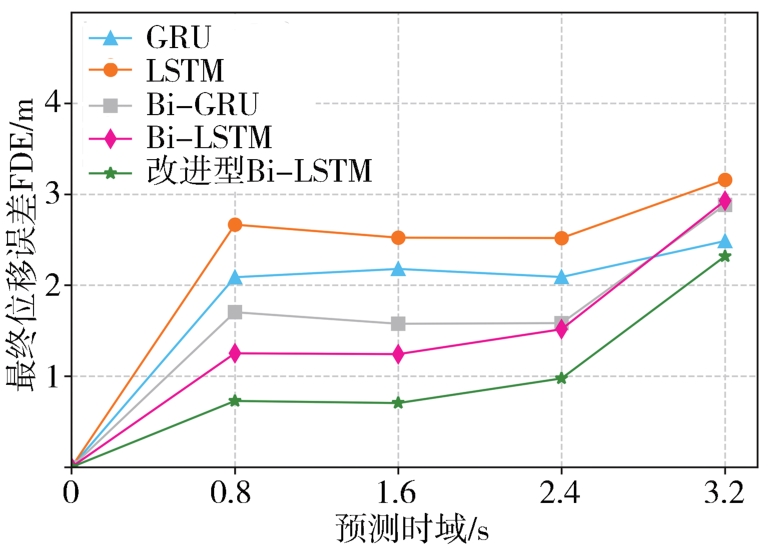
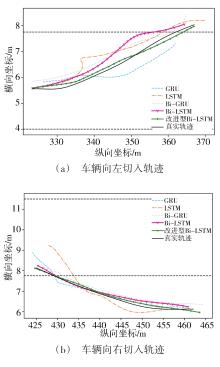
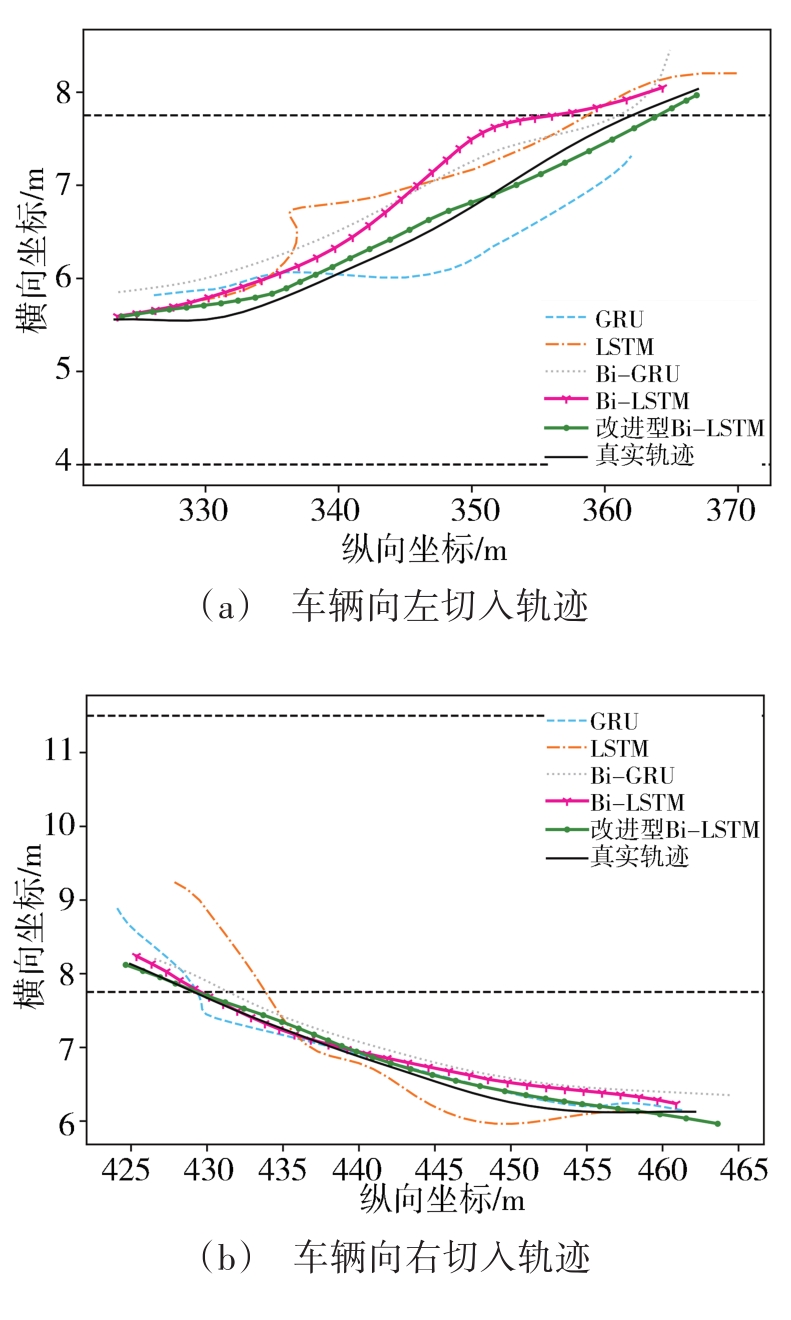
为保证人机混驾环境下自动驾驶汽车的安全行驶,对周围车辆切入轨迹的预测至关重要。本文首先使用Savitzky-Golay滤波器对大规模采集的自然驾驶数据进行去噪处理,根据准则提取车辆切入片段,建立符合中国道路状况的车辆切入数据集。其次,发挥Bi-LSTM网络能充分利用上下文信息的优点和in-out快捷连接有效减少梯度消失和网络退化的能力,提出了一种基于深度学习的改进型Bi-LSTM神经网络,来预测车辆的切入轨迹,在双向长短时记忆网络的基础上引入快捷连接,并综合考虑了自车对周边车辆切入的影响。利用自然驾驶数据集和NGSIM数据集进行试验验证,结果表明,本文提出的改进型Bi-LSTM预测模型的轨迹预测效果明显优于其他方法,对增强自动驾驶汽车的安全性具有重要的意义。