汽车工程 ›› 2022, Vol. 44 ›› Issue (12): 1825-1833.doi: 10.19562/j.chinasae.qcgc.2022.12.004
所属专题: 智能网联汽车技术专题-规划&控制2022年
蒋渊德1,朱冰2( ),赵祥模1,赵健2,郑兵兵3
),赵祥模1,赵健2,郑兵兵3
Yuande Jiang1,Bing Zhu2(),Xiangmo Zhao1,Jian Zhao2,Bingbing Zheng3
摘要:
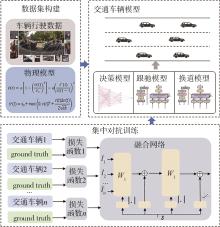
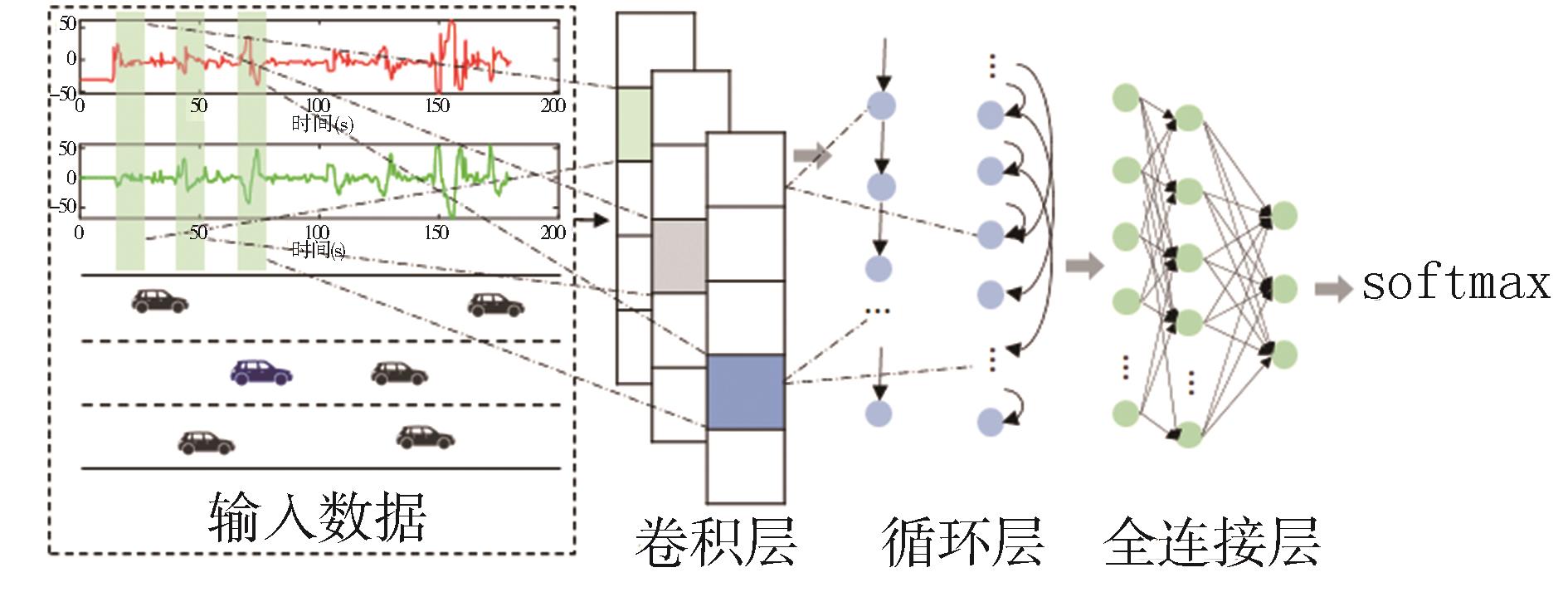
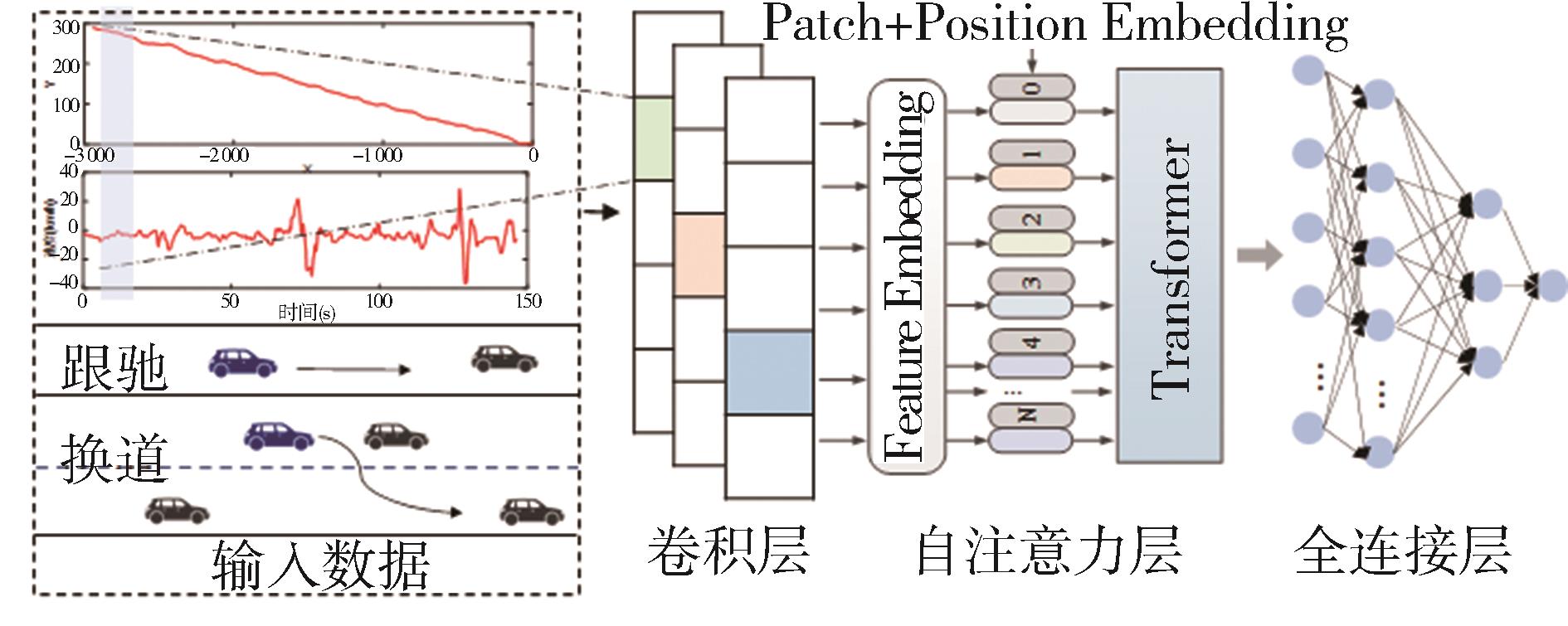
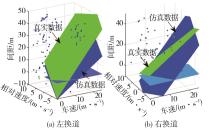
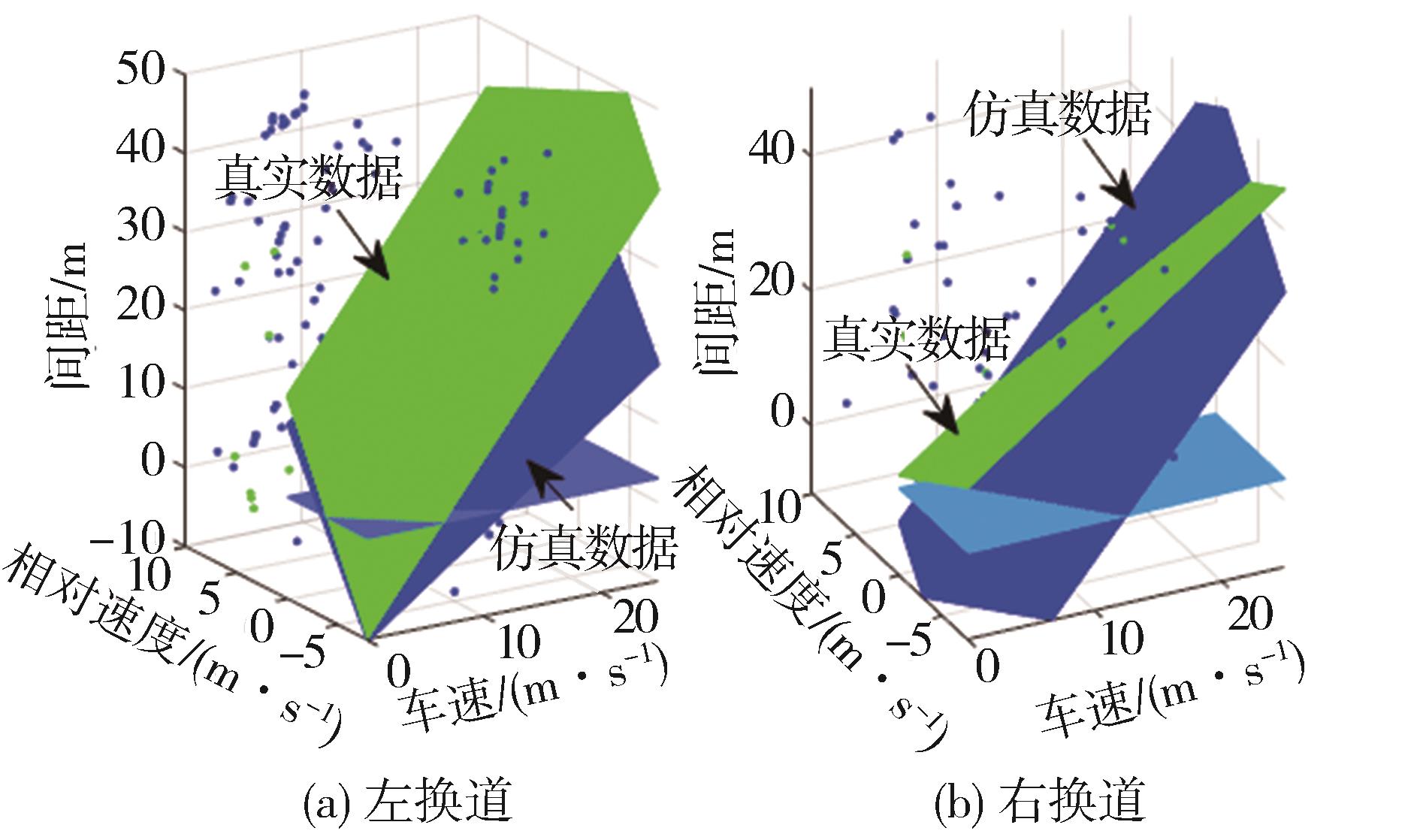
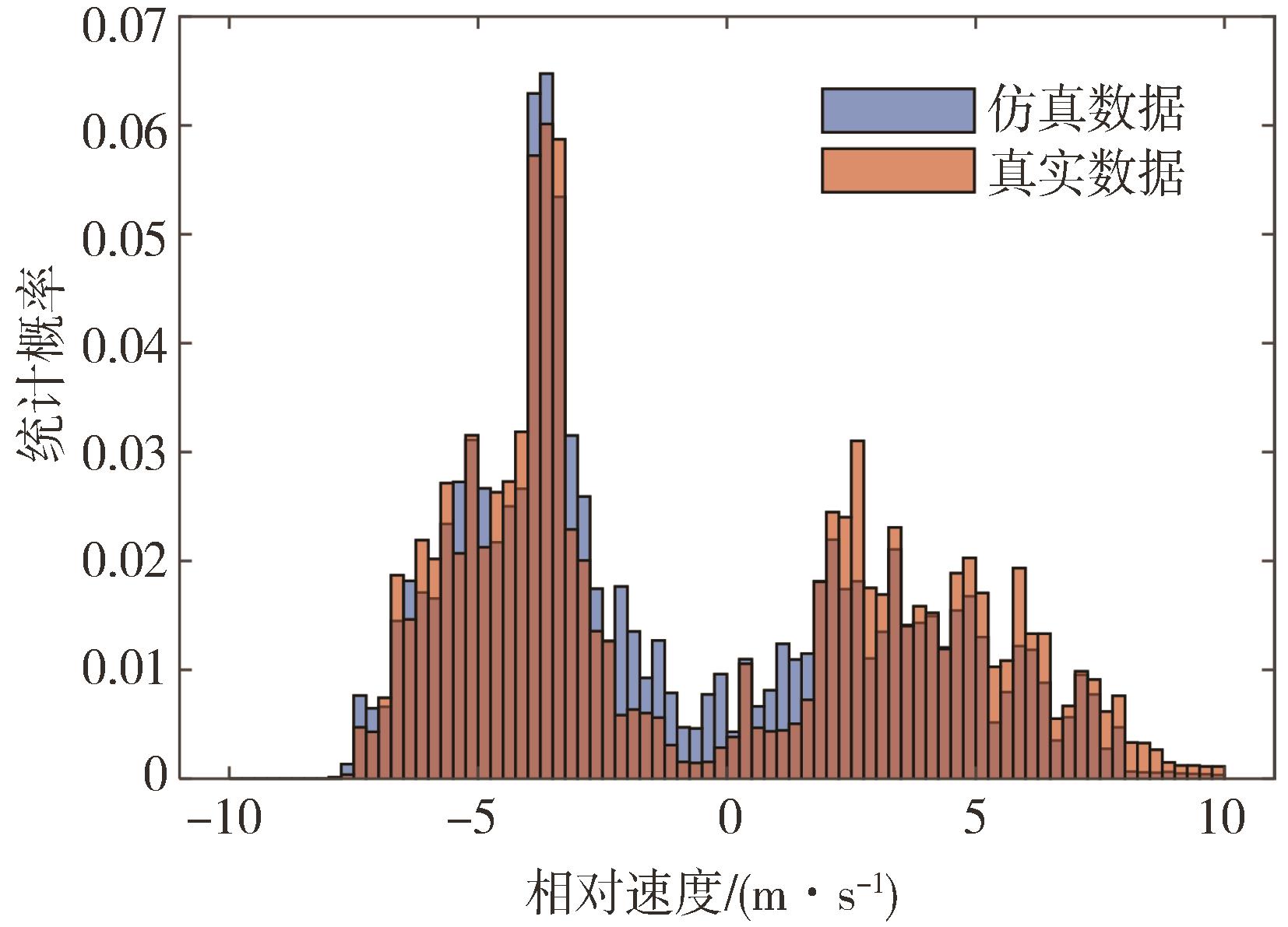
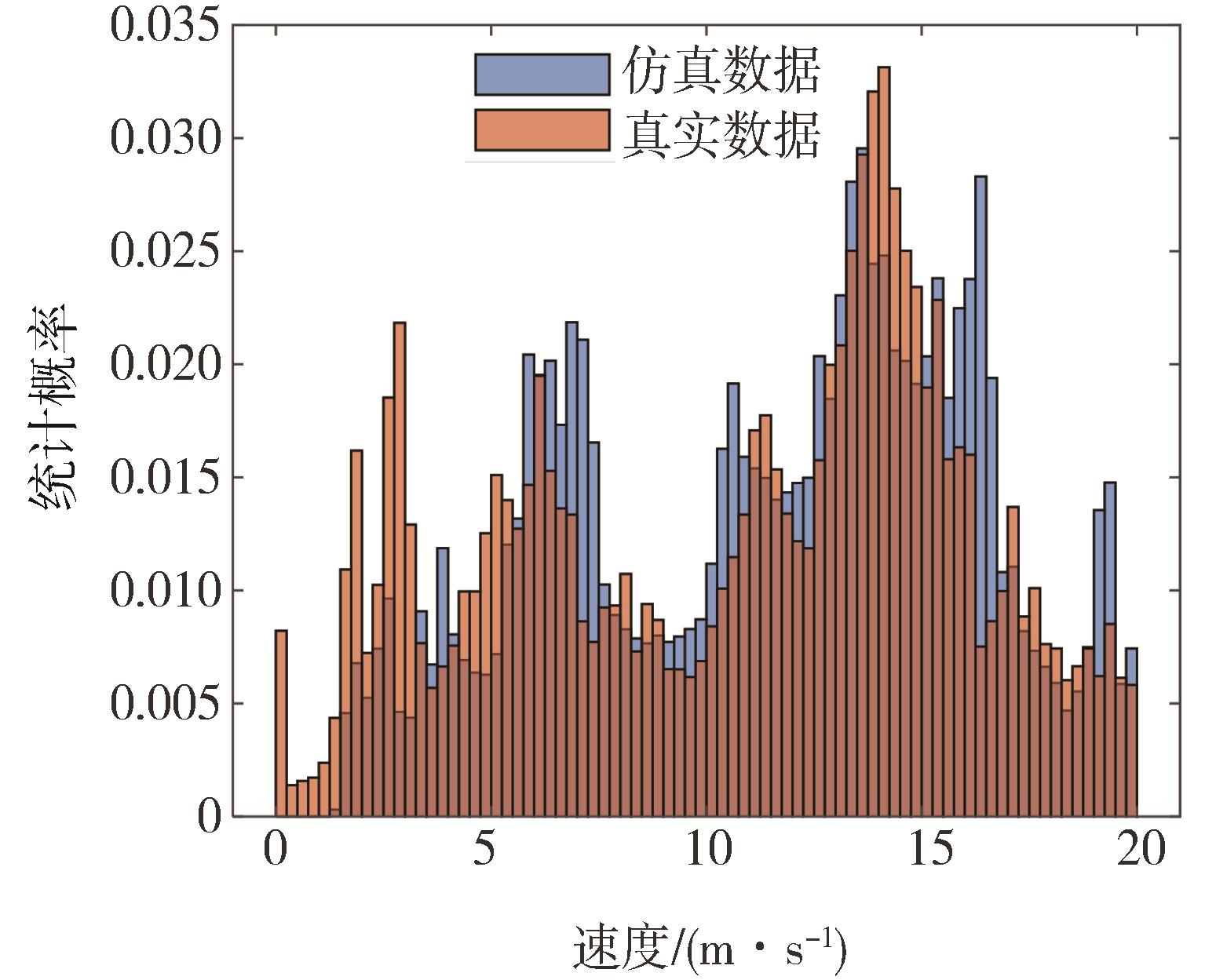
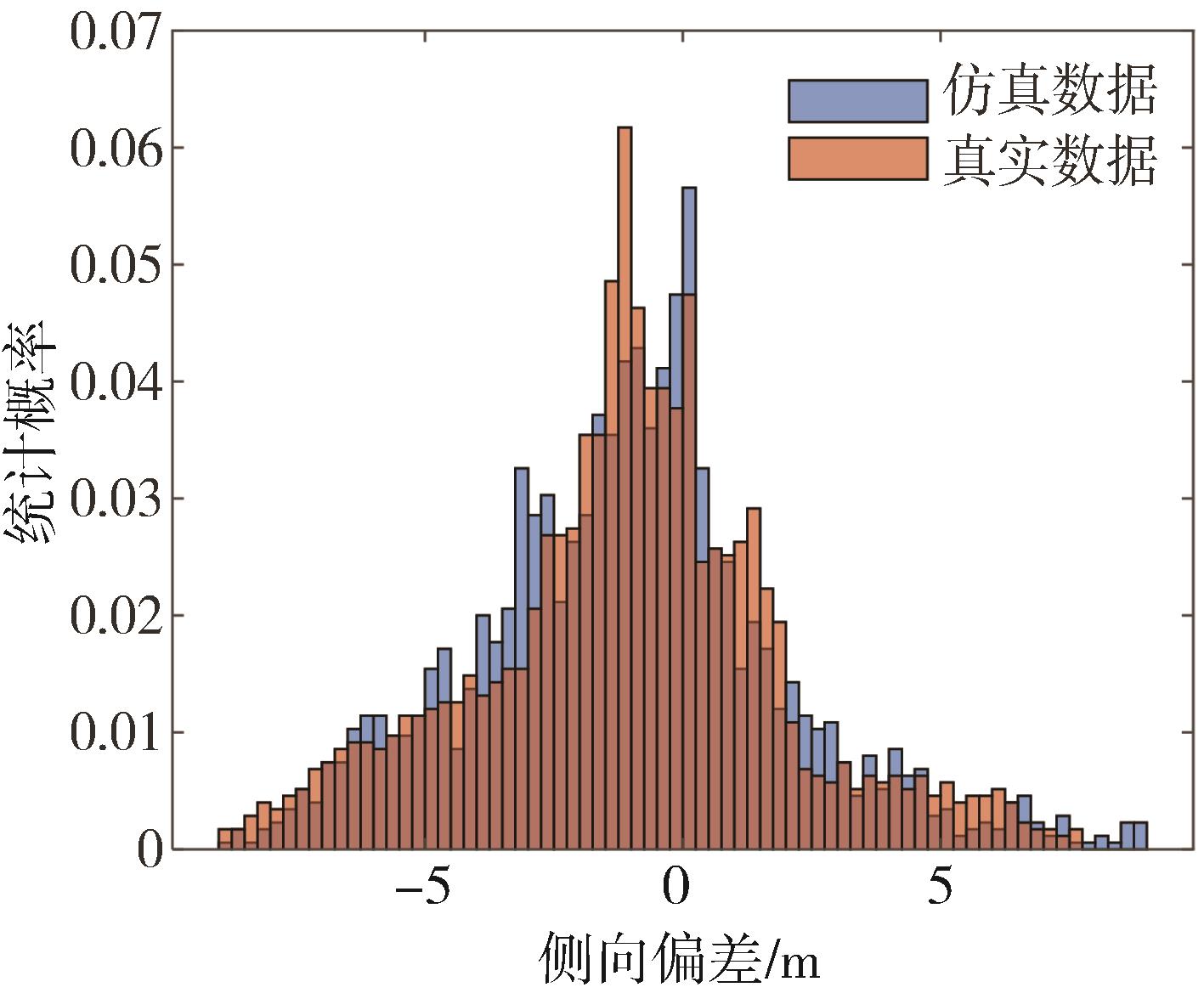
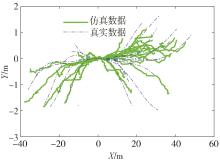
为满足自动驾驶汽车测试对场景真实度的要求,提出一种针对交通车辆交互关系的耦合特征建模方法。结合基于机理模型构建的虚拟数据和采集的真实场景数据建立交通车辆行为数据集;采用深度学习建立局部信息响应的交通车辆行为决策模型、跟驰模型和换道模型,结构相对简单的单体模型能提升场景模拟的可扩展性;针对自动驾驶汽车测试对模型鲁棒性要求高的问题,建立分布执行-集中对抗训练的架构进行交通车辆模型优化,提高模型对输入扰动的鲁棒性。构建交通车辆交互仿真环境对模型进行仿真,通过仿真数据与真实数据分布之间的对比和量化评价指标验证模型的有效性。