汽车工程 ›› 2023, Vol. 45 ›› Issue (12): 2234-2241.doi: 10.19562/j.chinasae.qcgc.2023.12.005
所属专题: 智能网联汽车技术专题-控制2023年
吕颖1,2,3,祁旭1,2,刘秋铮1,2,王鑫煜3( ),陈国迎4()
),陈国迎4()
Lü Ying1,2,3,Xu Qi1,2,Qiuzheng Liu1,2,Xinyu Wang3(),Guoying Chen4()
摘要:
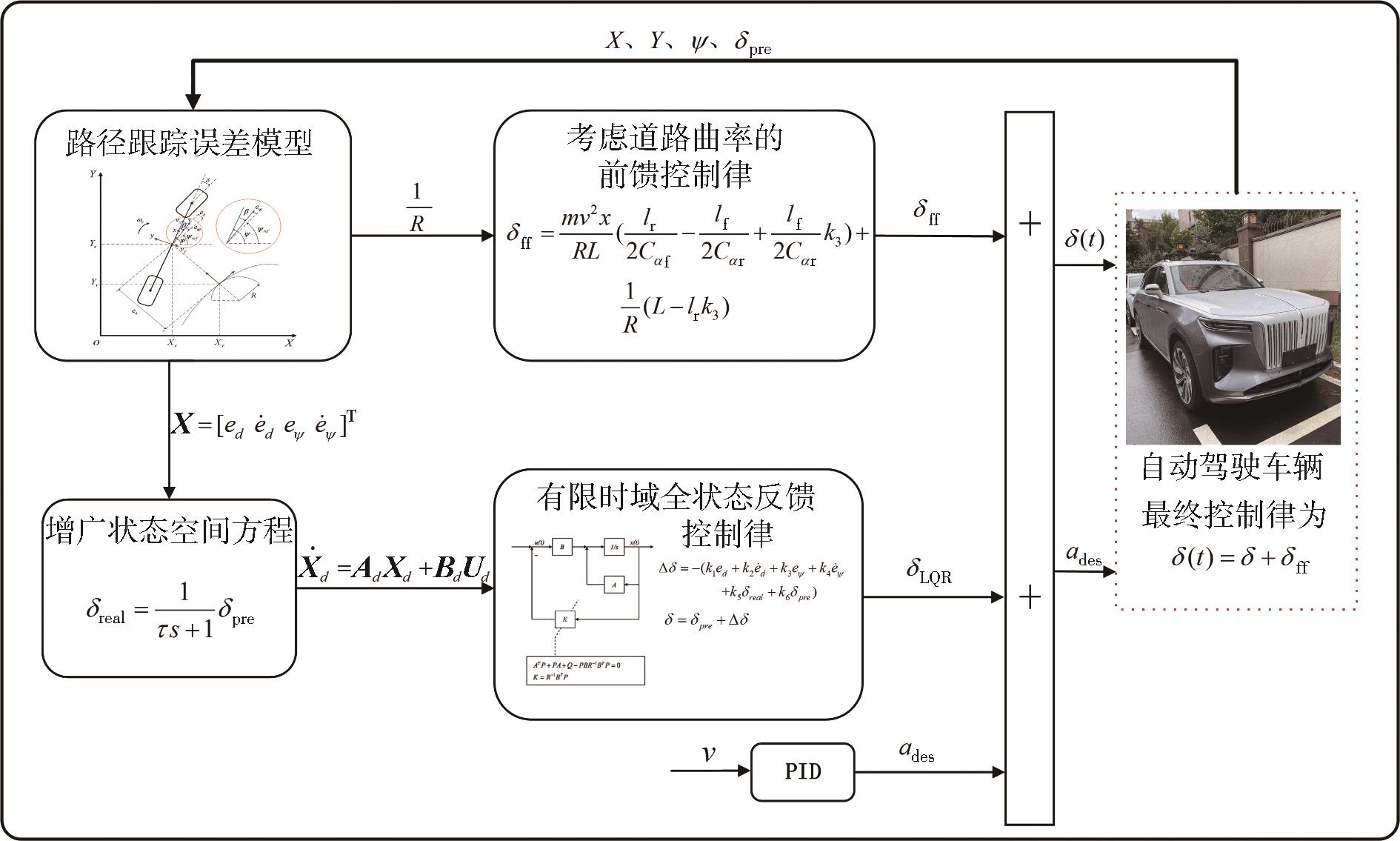
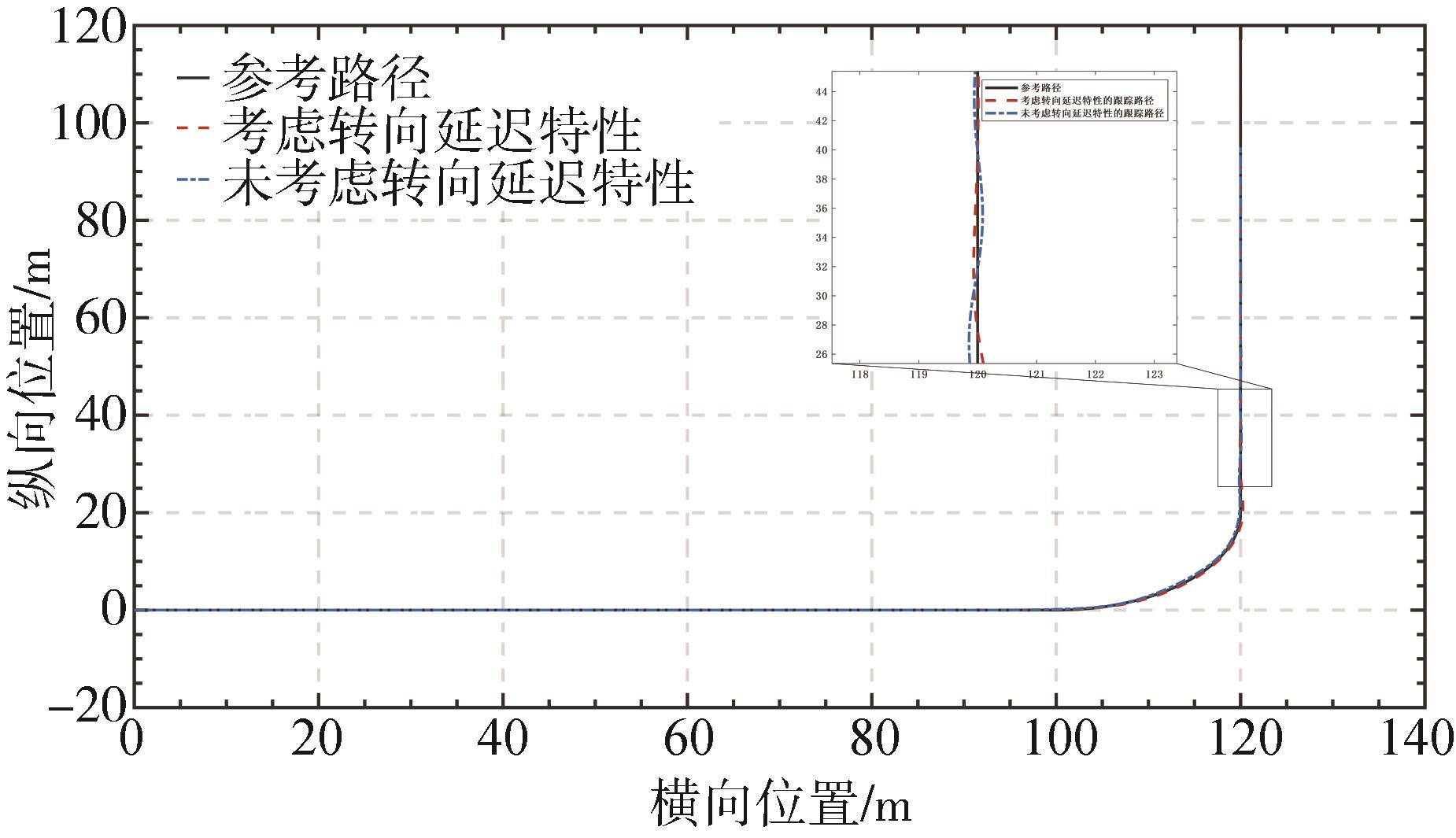
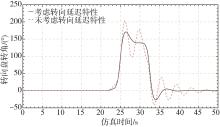
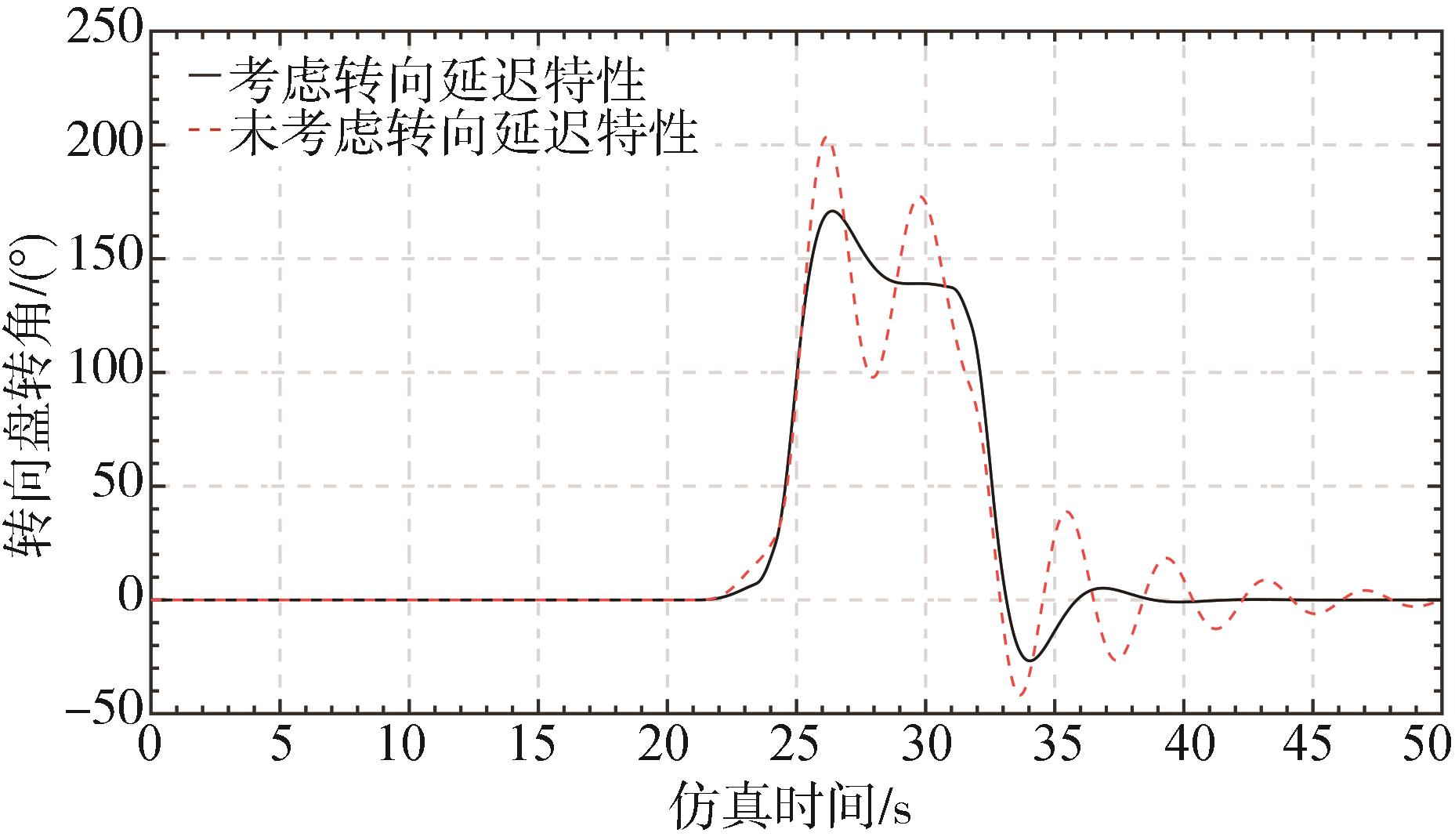
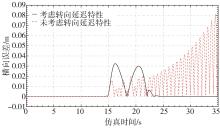
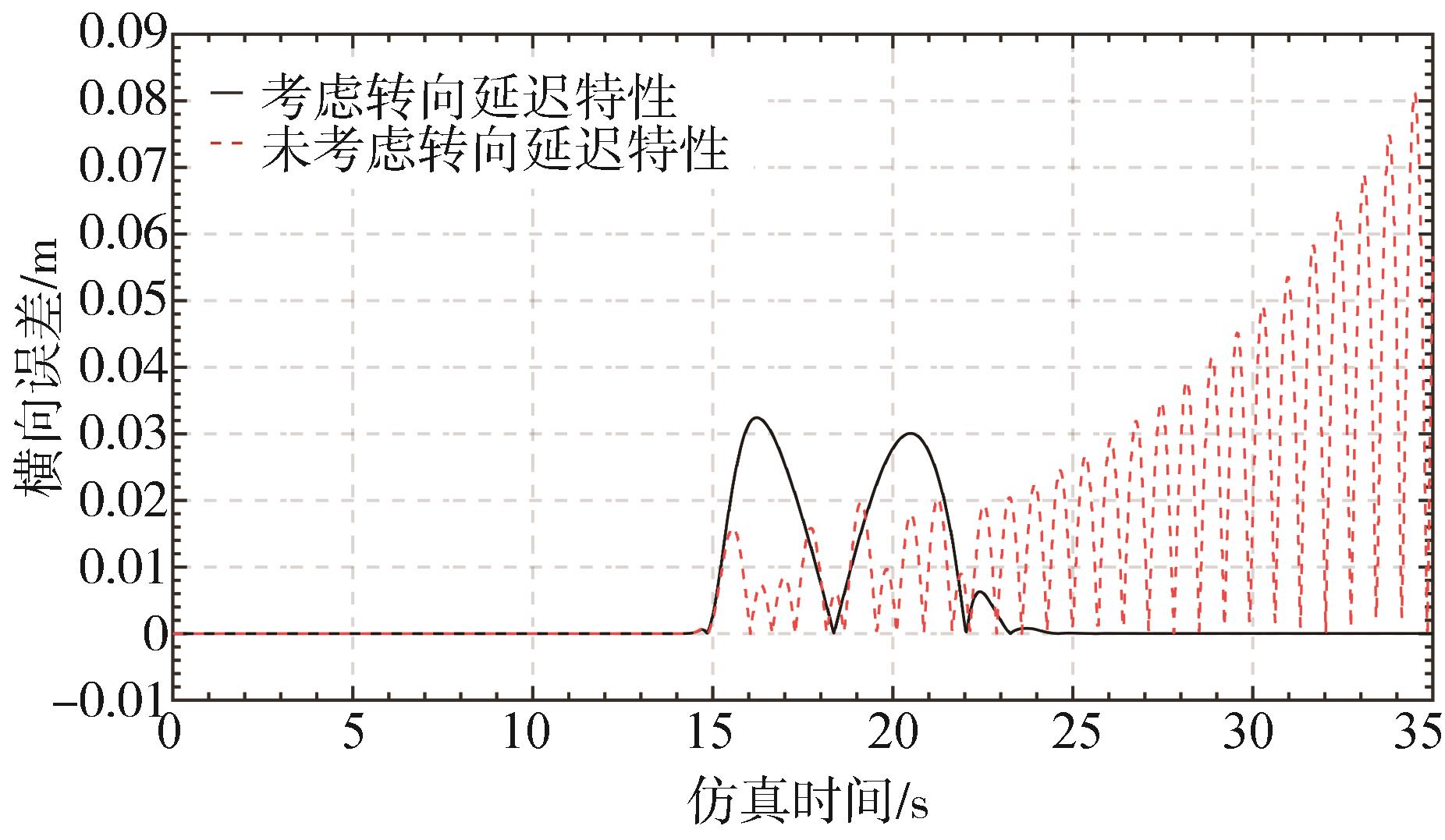
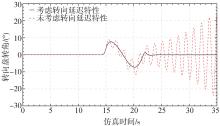
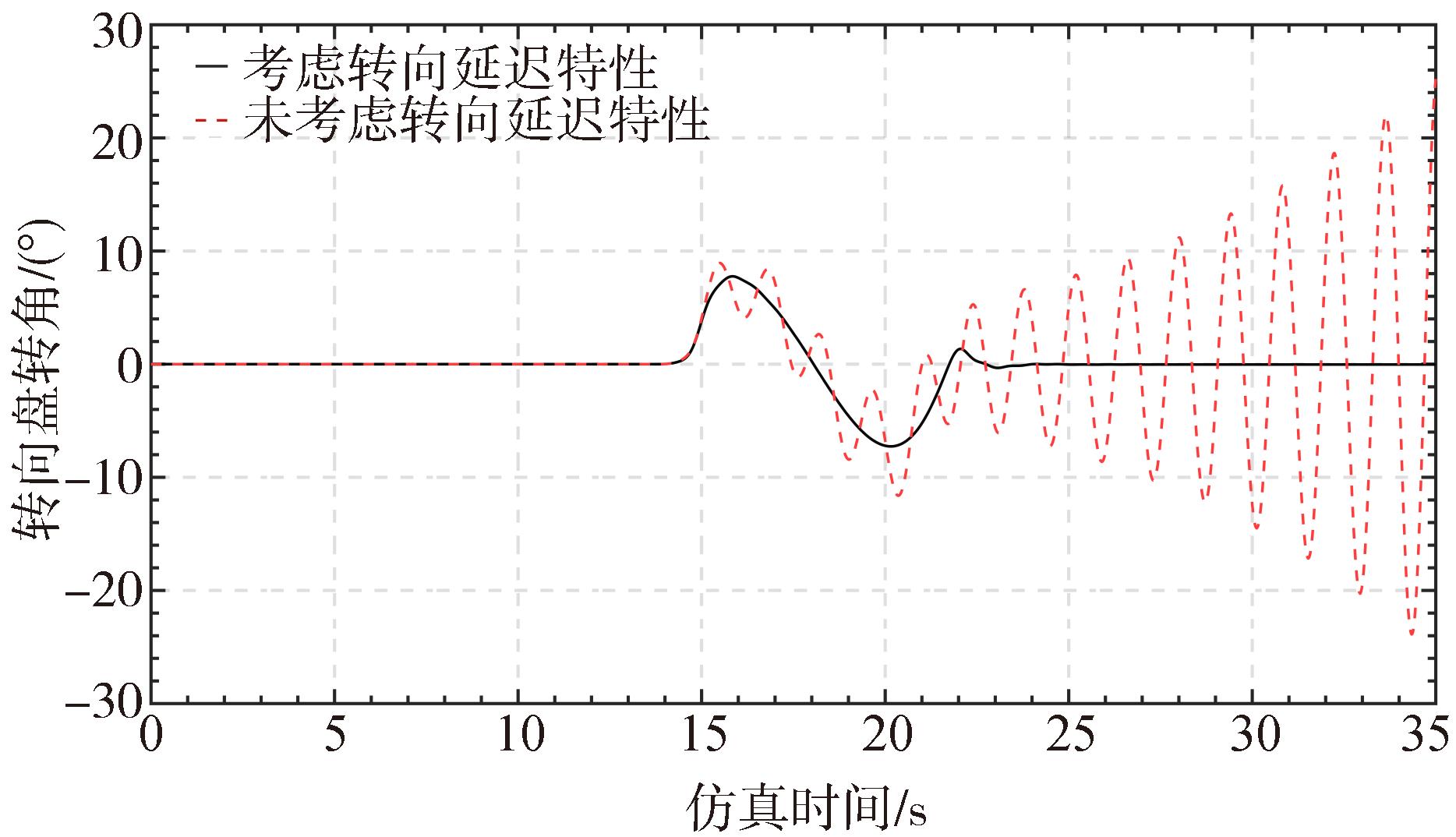
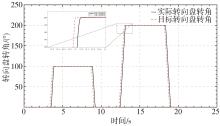
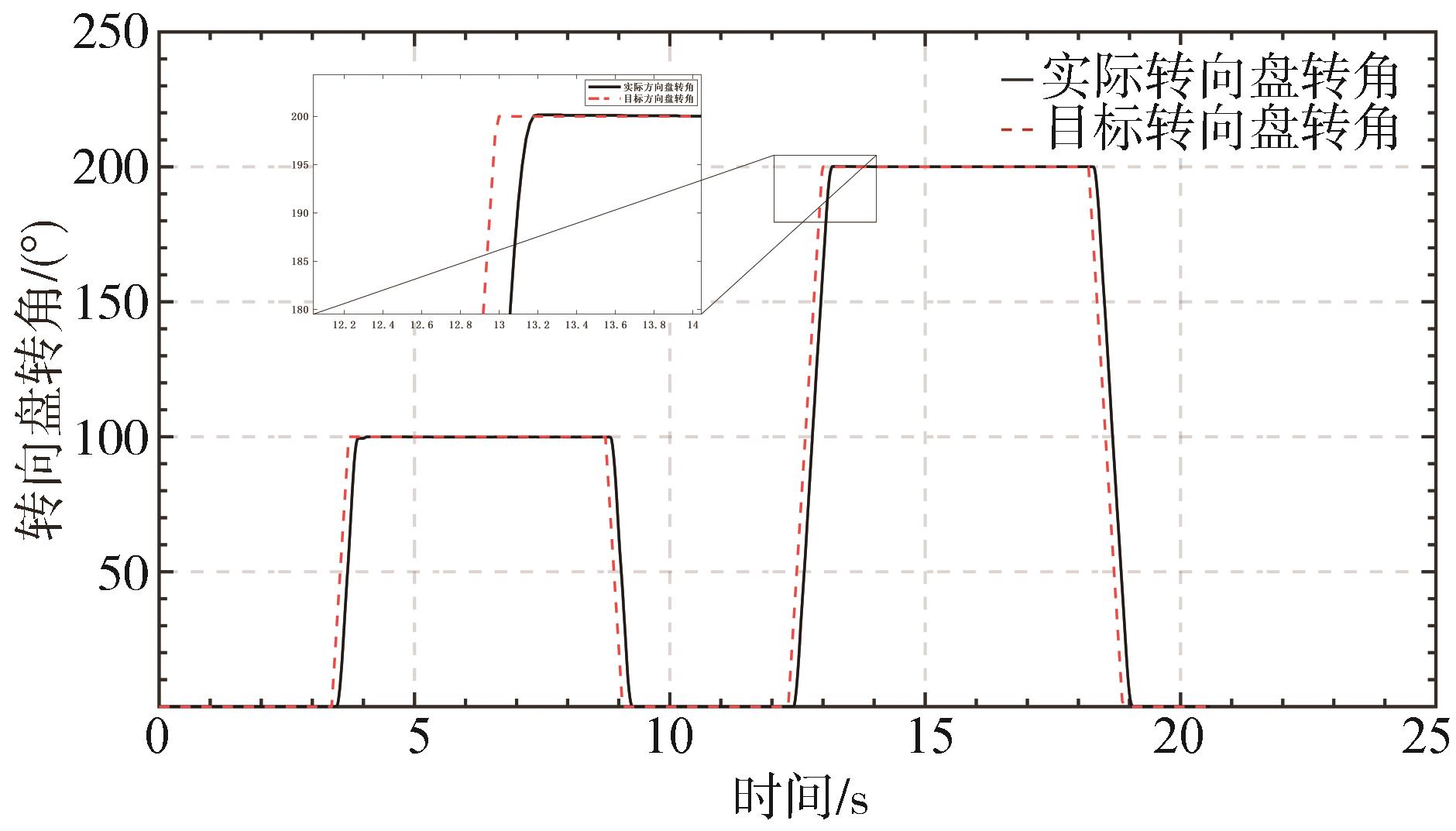
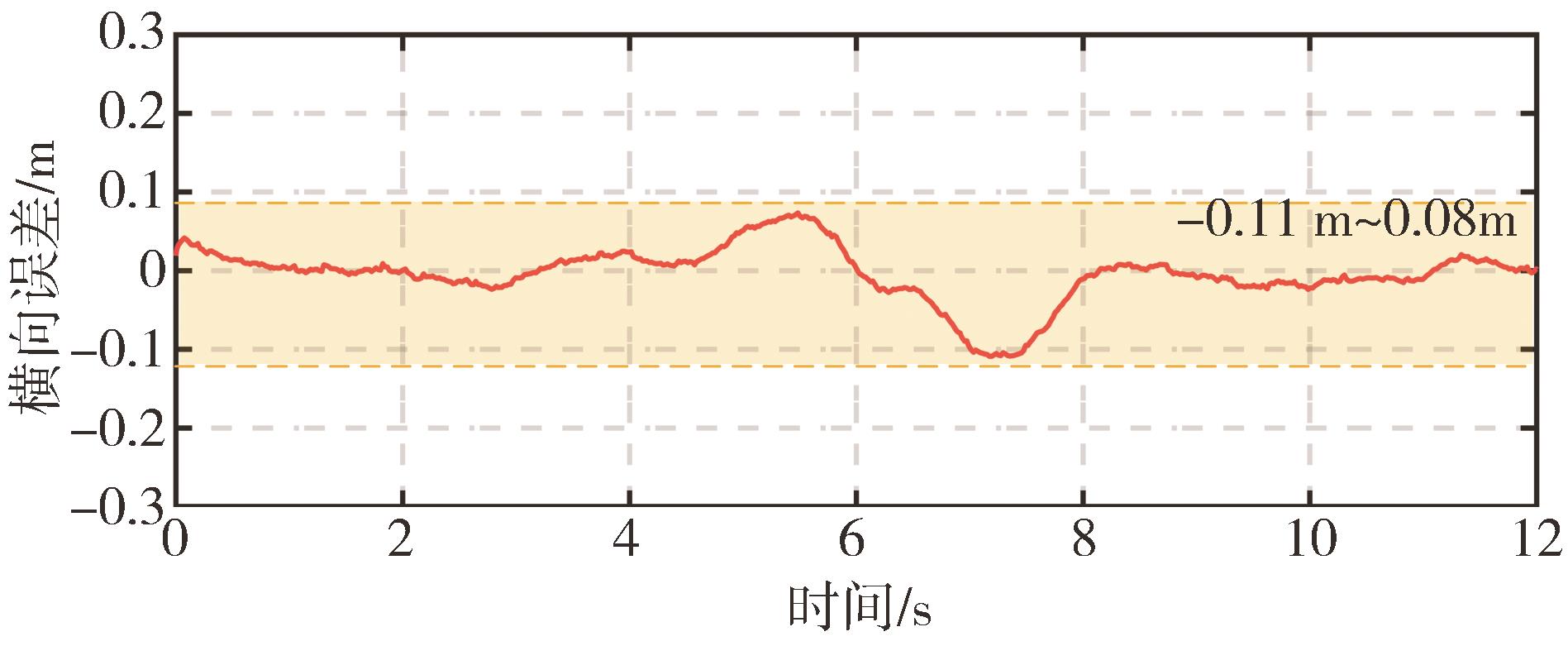
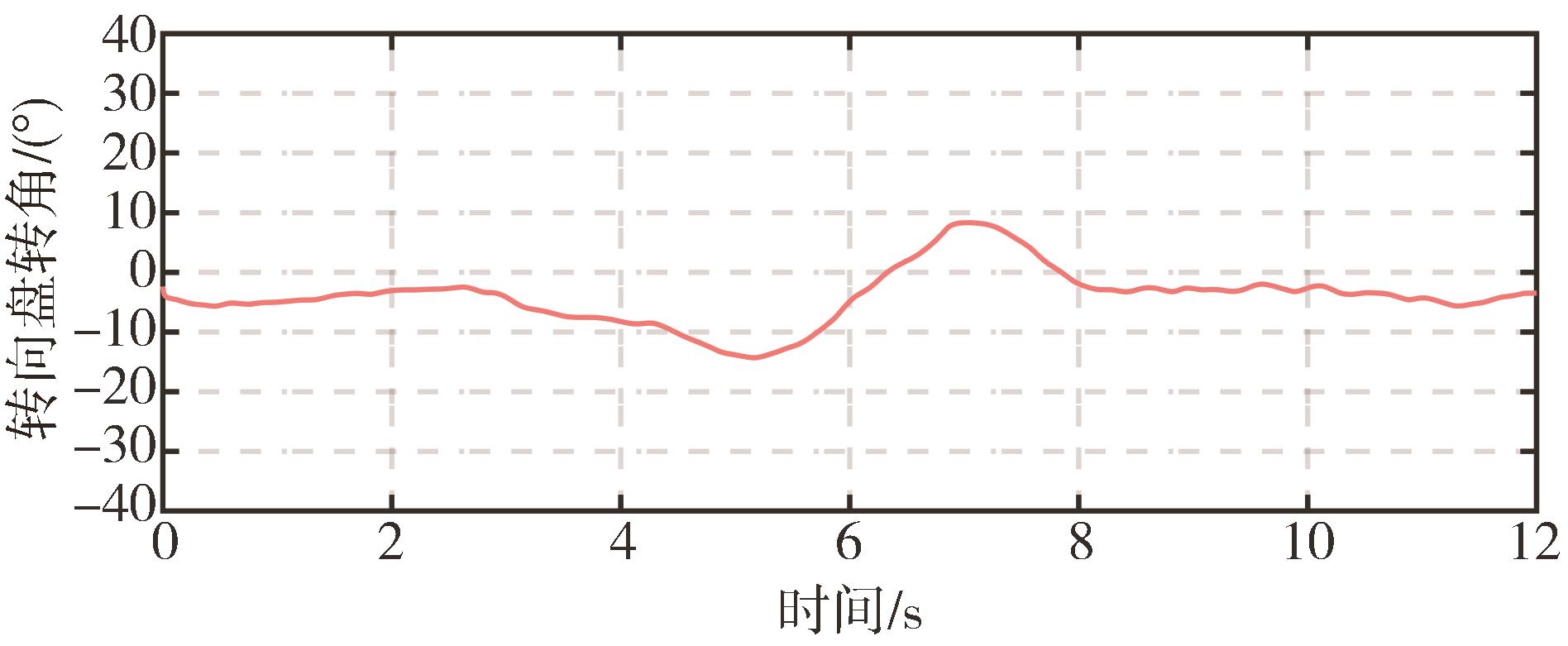
自动驾驶路径跟踪系统是实现L2级以上自动驾驶的重要支撑技术。线控转向系统存在的延迟响应特性会降低路径跟踪控制器的鲁棒性和控制精度,甚至在高车速下存在失稳现象。针对以上问题本文设计了前馈加有限时域全状态反馈的误差跟踪控制架构,在此基础上将转向系统延时作为1阶惯性环节进行模型化表达,并作为状态变量增广融合到误差跟踪控制架构中。本文利用联合仿真试验对提出的跟踪控制器进行了对比验证,验证结果证明本文提出的控制器在直角弯道和高速换道场景下,最大横向误差小于0.3 m,转向盘的转角均方差分别降低1.93%和64.22%。最后的实车试验结果表明,本文提出的控制器在高速换道场景下能够有效提升横向控制精度,最大横向误差小于0.11 m。