汽车工程 ›› 2022, Vol. 44 ›› Issue (1): 17-25.doi: 10.19562/j.chinasae.qcgc.2022.01.003
所属专题: 智能网联汽车技术专题-规划&控制2022年
胡杰( ),钟鑫凯,陈瑞楠,朱令磊,徐文才,张敏超
),钟鑫凯,陈瑞楠,朱令磊,徐文才,张敏超
Jie Hu(),Xinkai Zhong,Ruinan Chen,Linglei Zhu,Wencai Xu,Minchao Zhang
摘要:
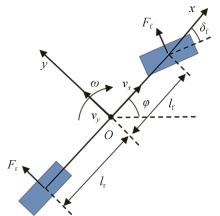
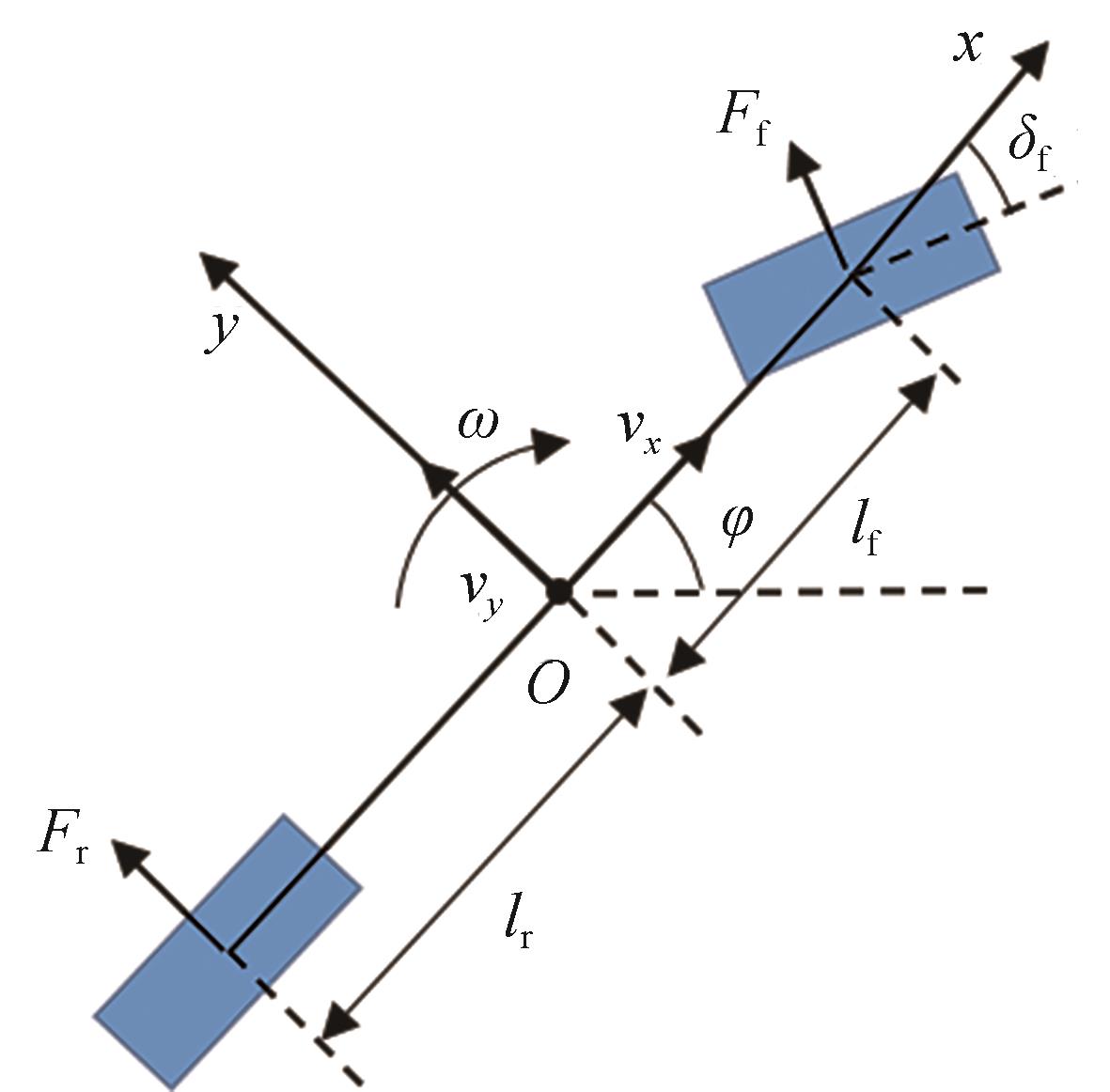
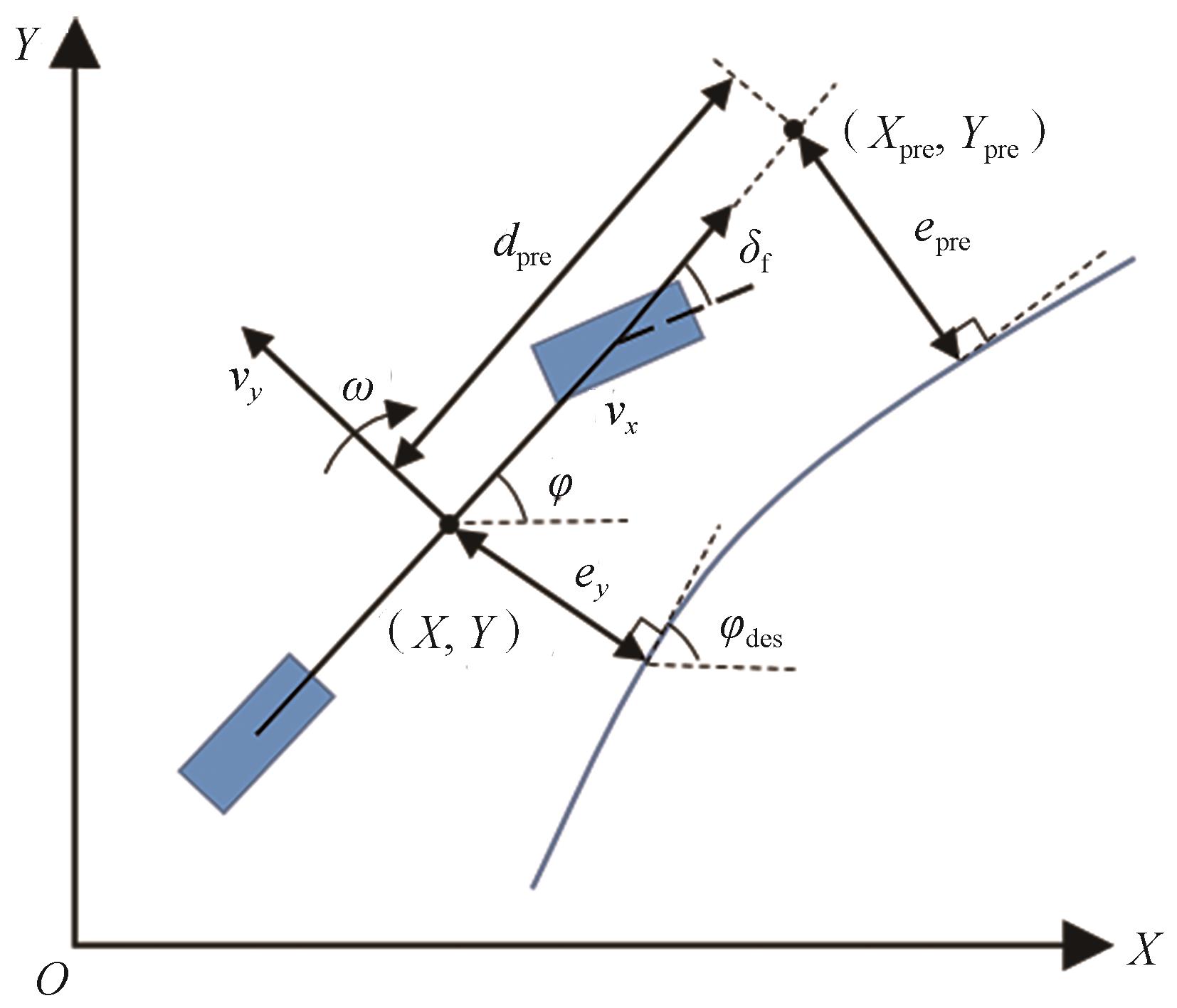
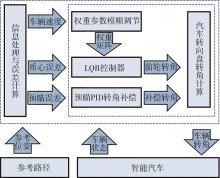
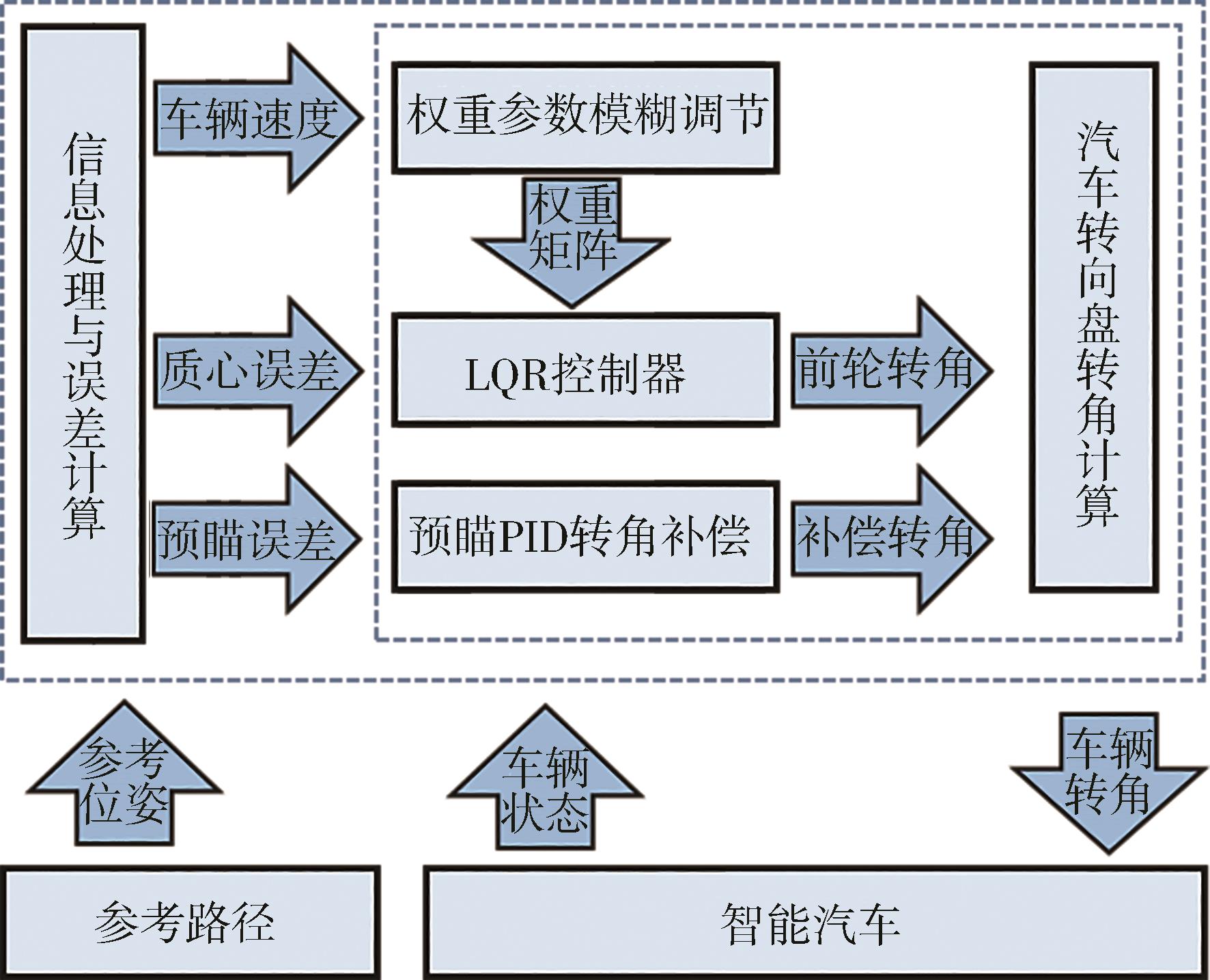
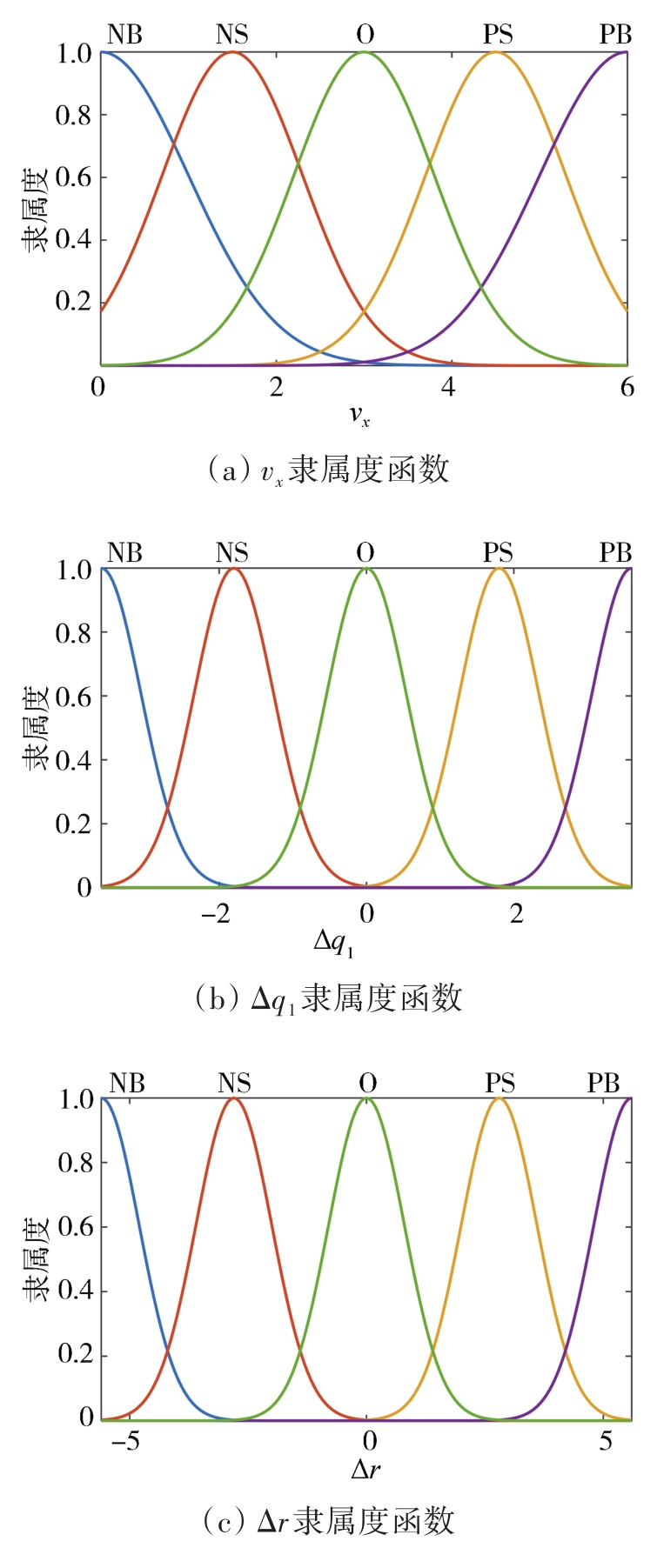
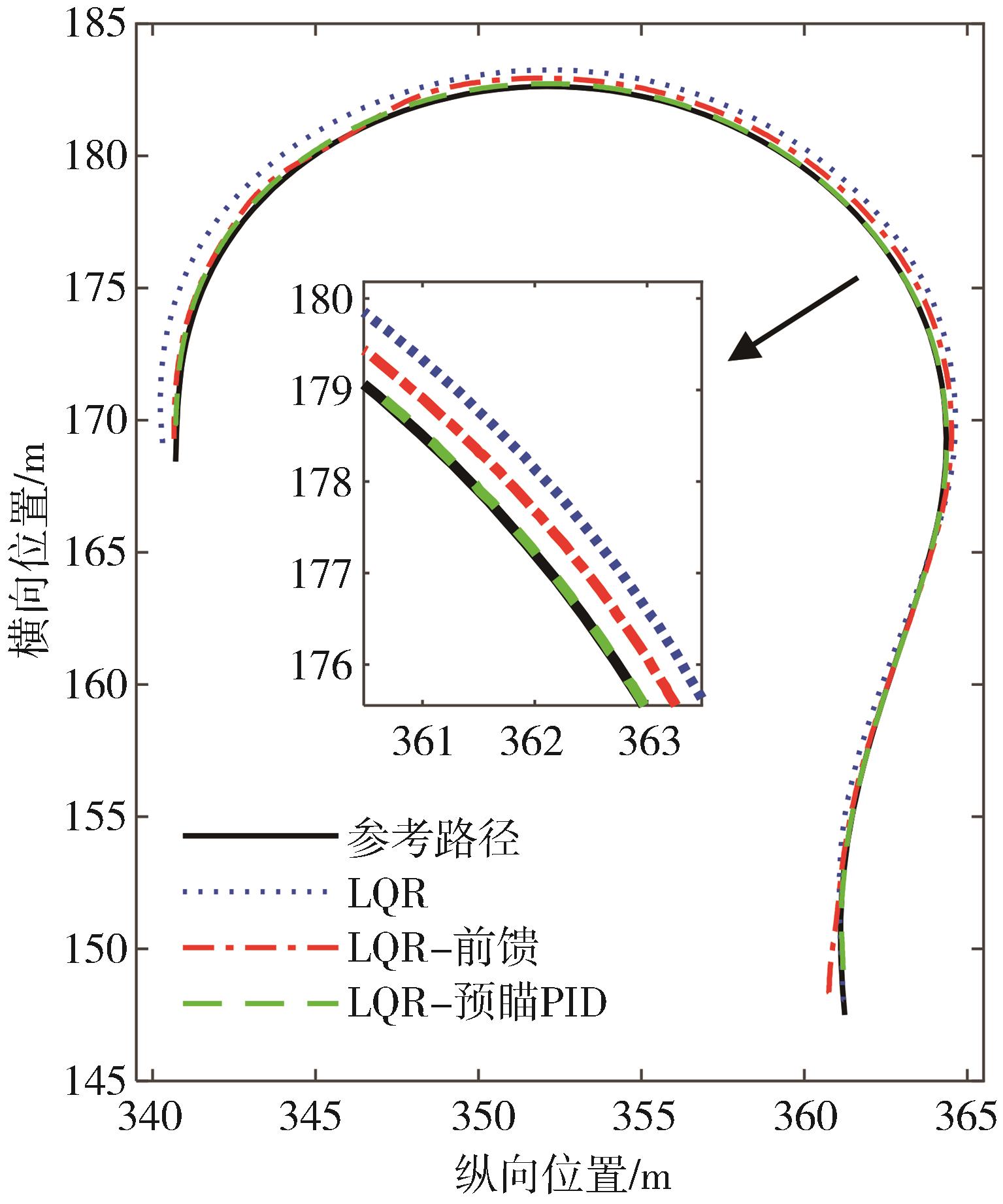
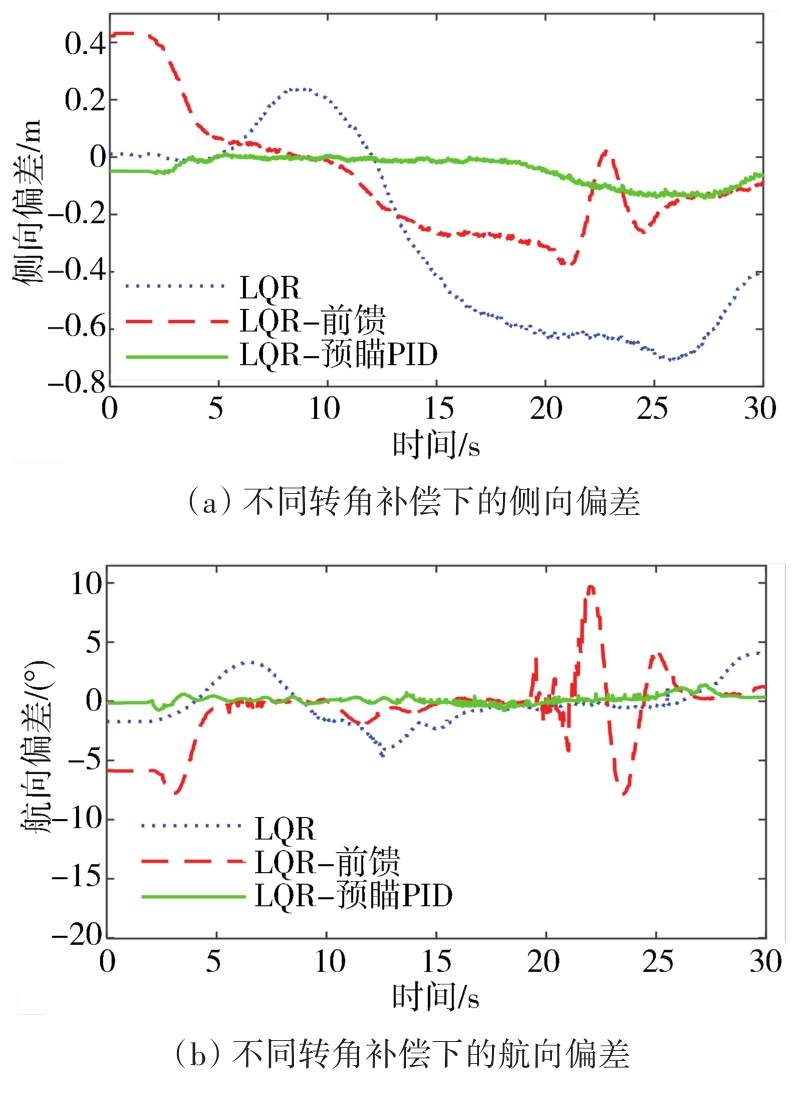
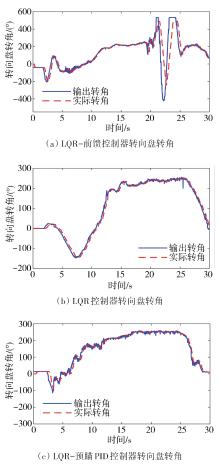
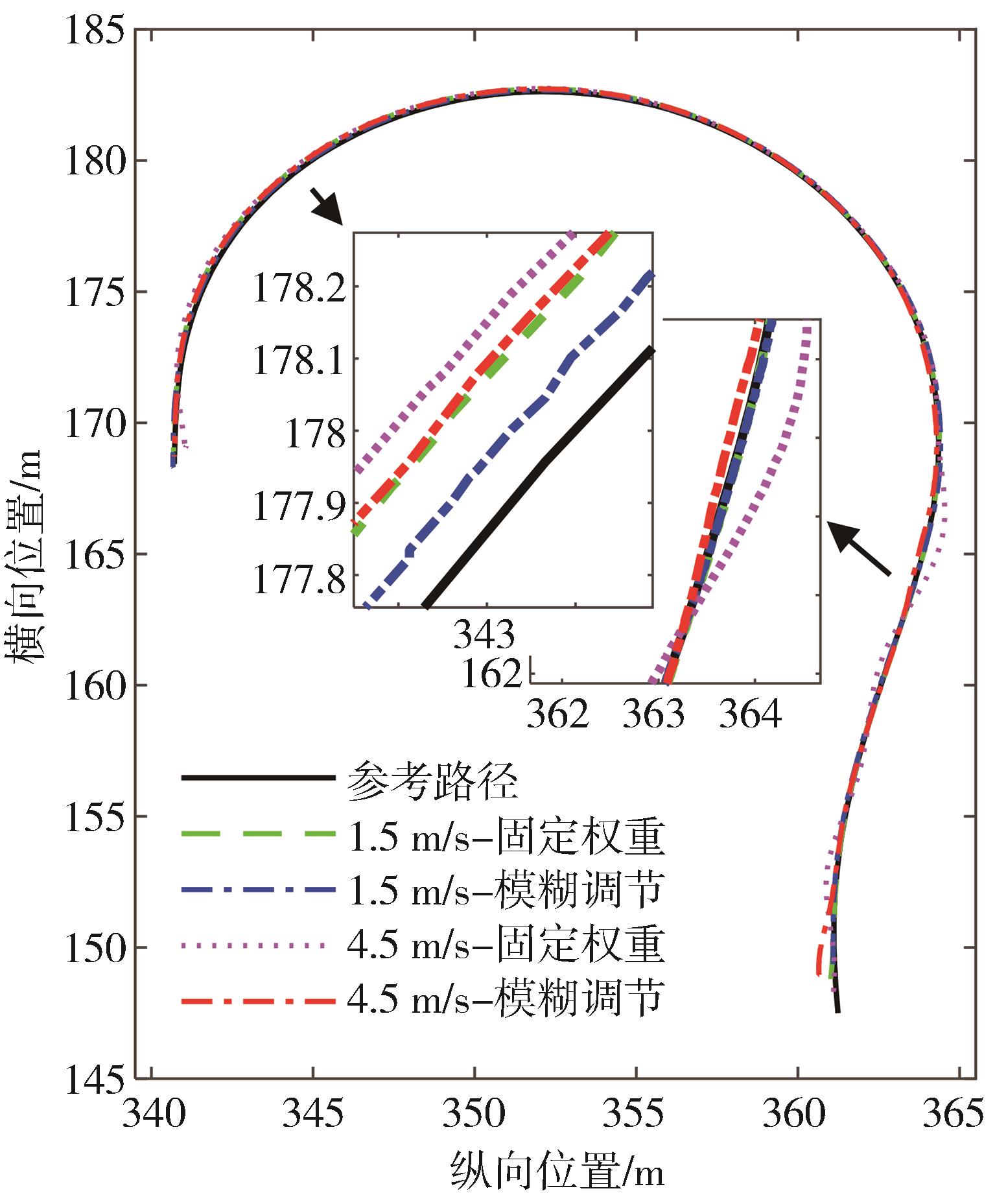
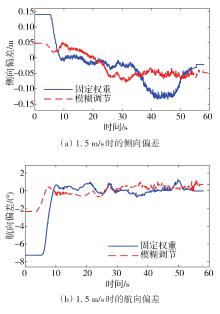
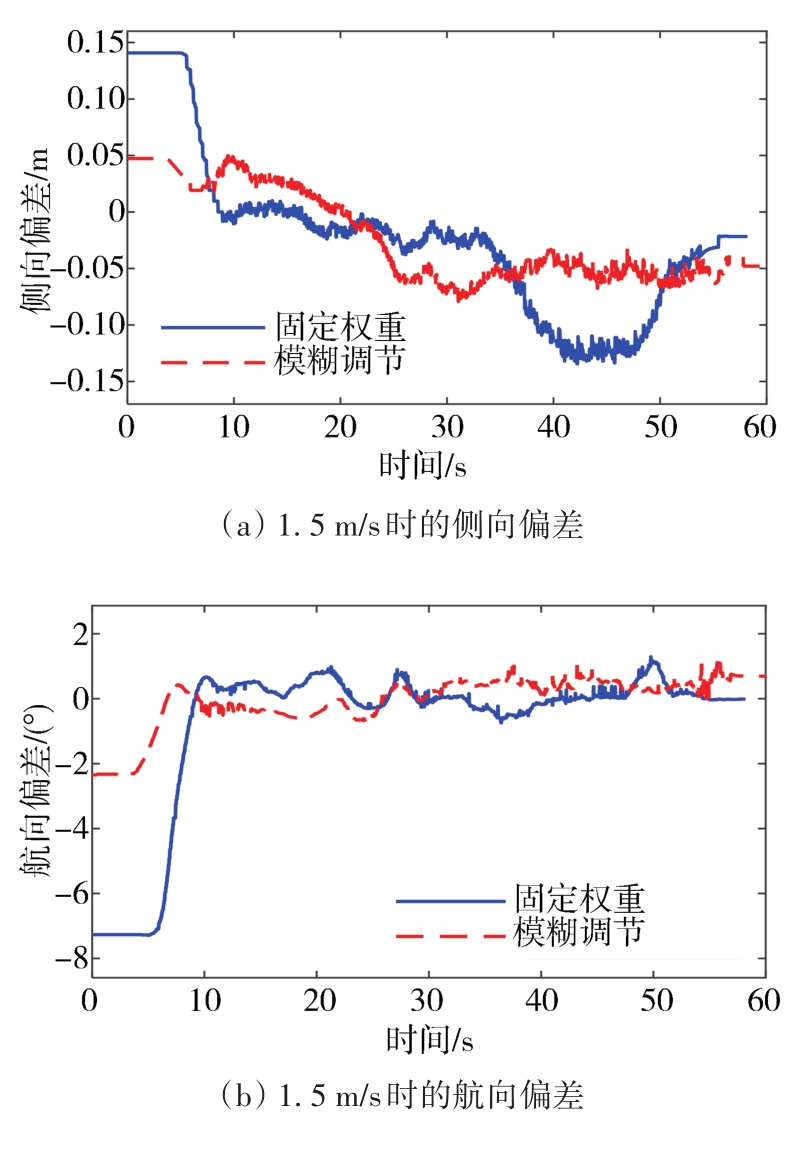
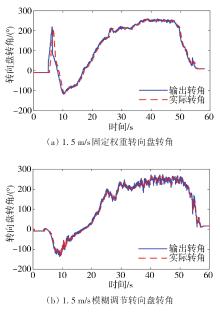
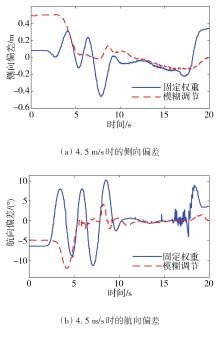
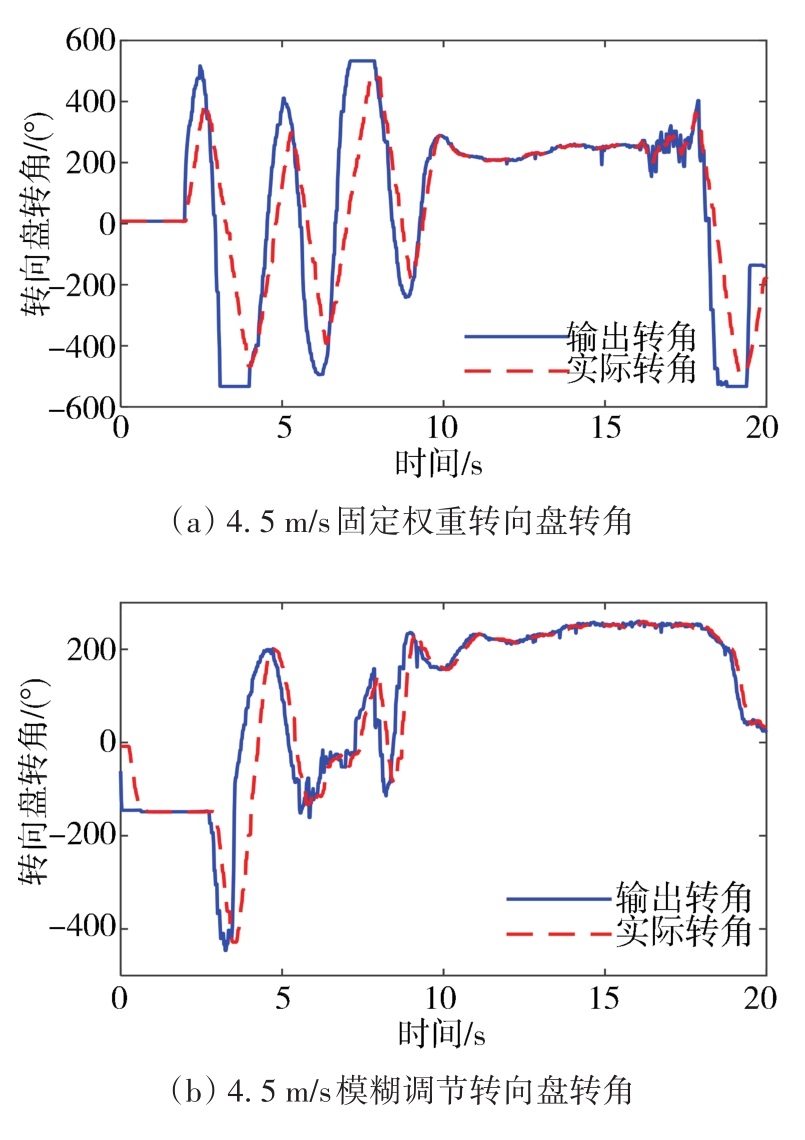
为保证智能汽车在不同车速下路径跟踪的精确性与稳定性,本文中设计了一种带有预瞄PID转角补偿的模糊线性二次型调节器(LQR)以进行路径跟踪控制。首先,基于路径跟踪误差模型设计了LQR控制器,并采用预瞄PID方法进行转角补偿,消除稳态误差,提高跟踪精度。接着,针对固定权重系数的控制器对于不同车速适应性较差的问题,提出了一种基于车速的权重系数模糊调节策略。最后,通过实车试验,验证了控制器在实车环境中的控制性能。结果表明,设计的控制器具有较高的跟踪精度,且在不同车速下均能保持良好的精确性与稳定性。