汽车工程 ›› 2023, Vol. 45 ›› Issue (11): 2092-2103.doi: 10.19562/j.chinasae.qcgc.2023.11.010
所属专题: 智能网联汽车技术专题-控制2023年
胡杰1,2,3( ),陈锐鹏1,2,3,张志豪1,2,3,向博文1,2,3,刘昊岩1,2,3,朱琪1,2,3,郭启翔4
),陈锐鹏1,2,3,张志豪1,2,3,向博文1,2,3,刘昊岩1,2,3,朱琪1,2,3,郭启翔4
Jie Hu1,2,3(),Ruipeng Chen1,2,3,Zhihao Zhang1,2,3,Bowen Xiang1,2,3,Haoyan Liu1,2,3,Qi Zhu1,2,3,Qixiang Guo4
摘要:
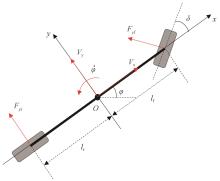
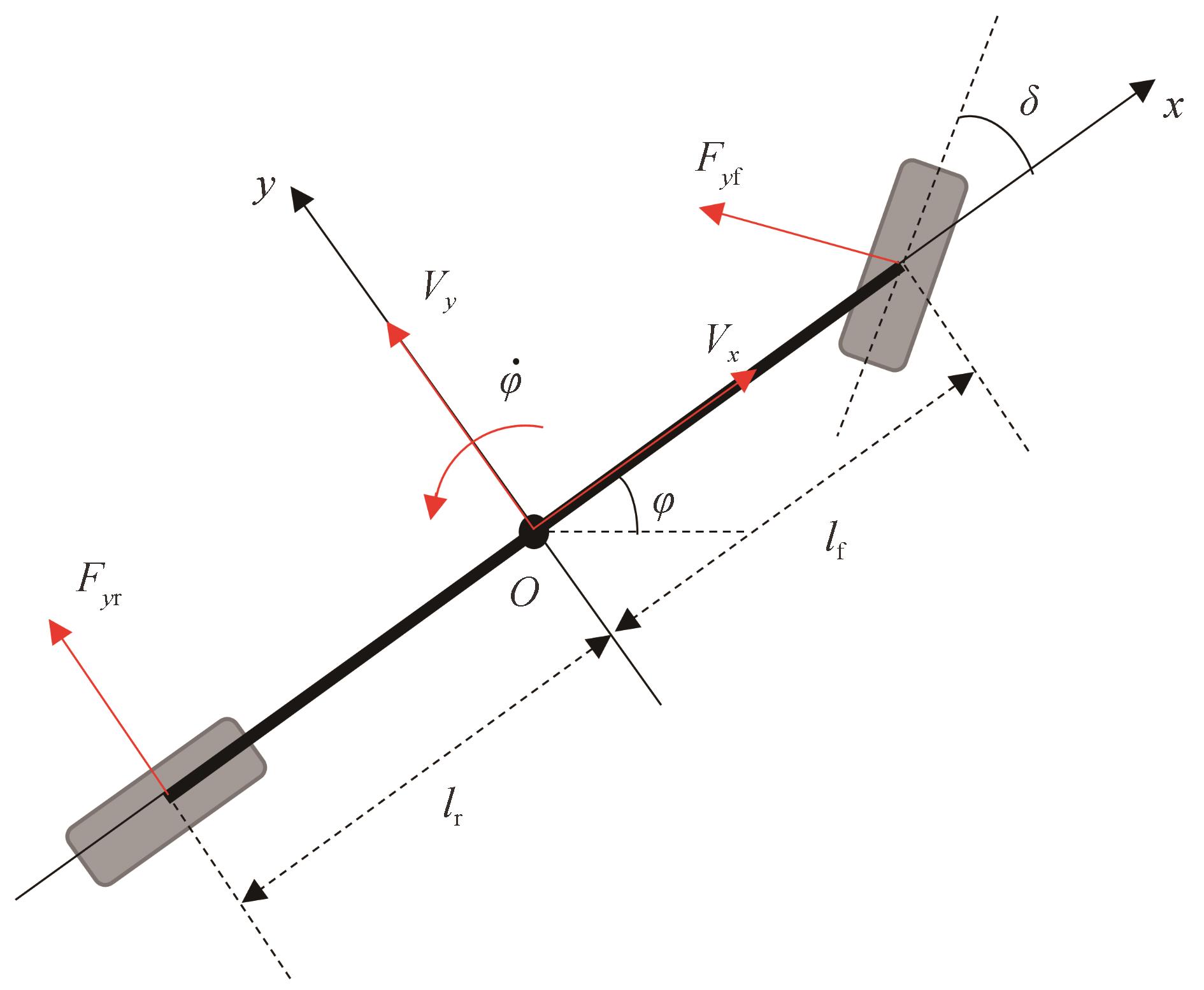
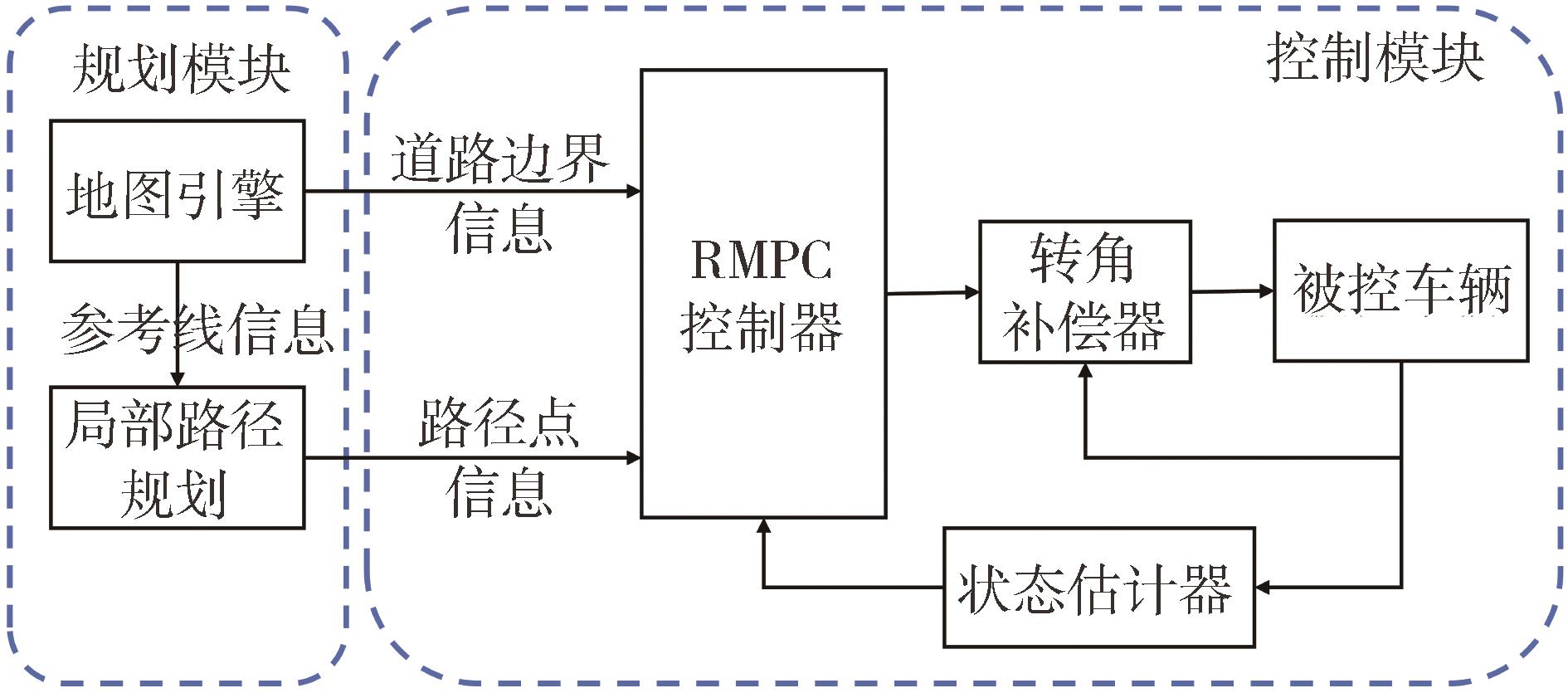
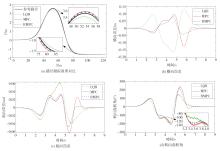
针对自动驾驶货车相较于普通乘用车具有较大模型不确定性、执行器偏差以及存在曲率扰动等外部影响因素导致路径跟踪精度不足问题,本文提出一种基于鲁棒模型预测控制(robust model predictive control,RMPC)的分层式控制方法。首先,在转角增量式控制误差模型的基础上,根据实际车辆系统与标称模型之间的偏差,设计鲁棒控制律并构建上层多目标约束RMPC控制器,提高跟踪精度。然后,针对自动驾驶货车不足转向以及定位误差问题,设计下层转角补偿器和基于中值滤波的状态估计器,改善执行响应,提升车辆稳定性。最后,通过TruckSim/Simulink联合仿真和实车试验验证,结果表明:所提出的控制方法能够有效处理模型失配和不确定性扰动,具备良好的鲁棒性和适应性。