汽车工程 ›› 2022, Vol. 44 ›› Issue (8): 1237-1250.doi: 10.19562/j.chinasae.qcgc.2022.08.013
所属专题: 新能源汽车技术-电驱动&能量管理2022年
林程,易江( ),田雨
),田雨
收稿日期:2022-01-21
修回日期:2022-02-26
出版日期:2022-08-25
发布日期:2022-08-25
通讯作者:
易江
E-mail:beilyij_1991@126.com
基金资助:
Cheng Lin,Jiang Yi(),Yu Tian
Received:2022-01-21
Revised:2022-02-26
Online:2022-08-25
Published:2022-08-25
Contact:
Jiang Yi
E-mail:beilyij_1991@126.com
摘要:
为了改善AMT换挡执行机构参数时变下的换挡性能,在考虑系统模型高度非线性、系统噪声特性未知的情况下,本文中提出了一种基于非线性
林程,易江,田雨. 电动客车AMT换挡执行机构状态估计及参数辨识[J]. 汽车工程, 2022, 44(8): 1237-1250.
Cheng Lin,Jiang Yi,Yu Tian. State Estimation and Parameter Identification of Shifting Actuator of Automatic Transmission of Electric Vehicles[J]. Automotive Engineering, 2022, 44(8): 1237-1250.
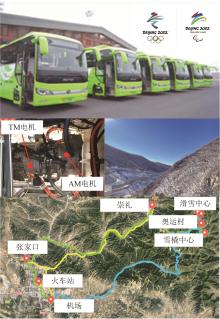
图1
双电机耦合高效电驱动系统应用场景"

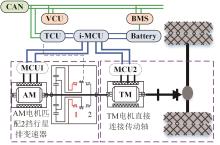
图2
双电机耦合高效电驱动系统构型简图"

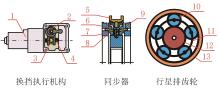
图3
两挡行星排变速器组成图"
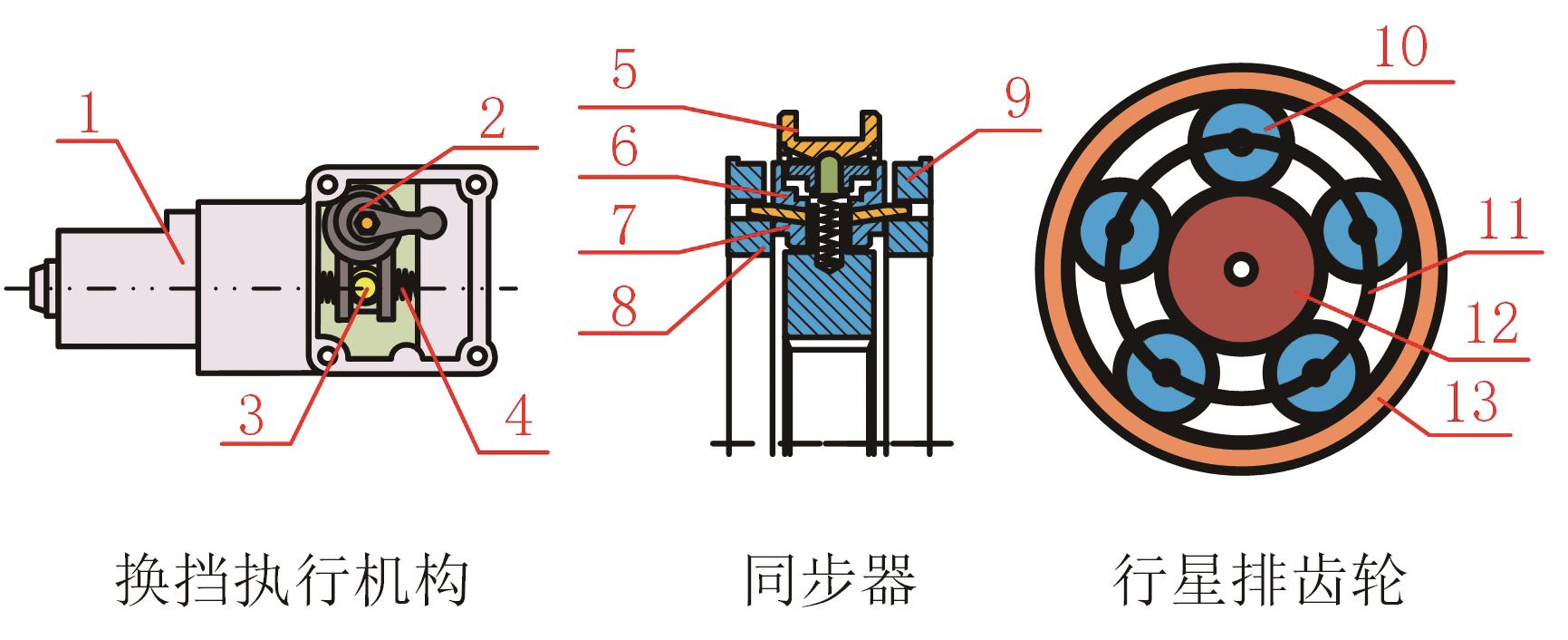
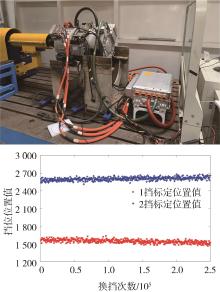
图4
换挡实验台架及换挡位置数据分析"
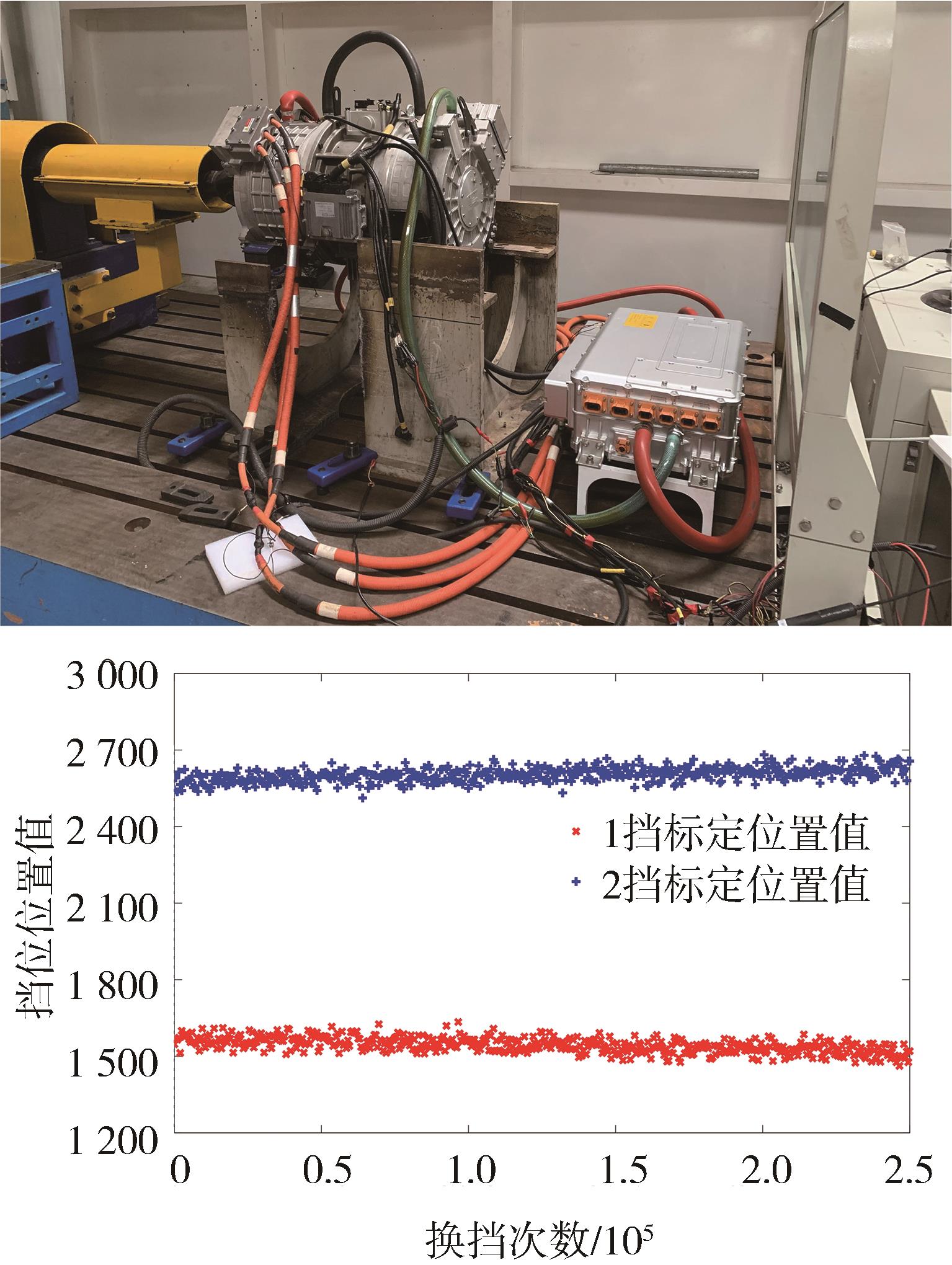

图5
换挡执行机构拆解图"

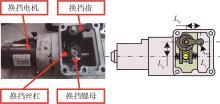
图6
换挡执行机构实物及简图"
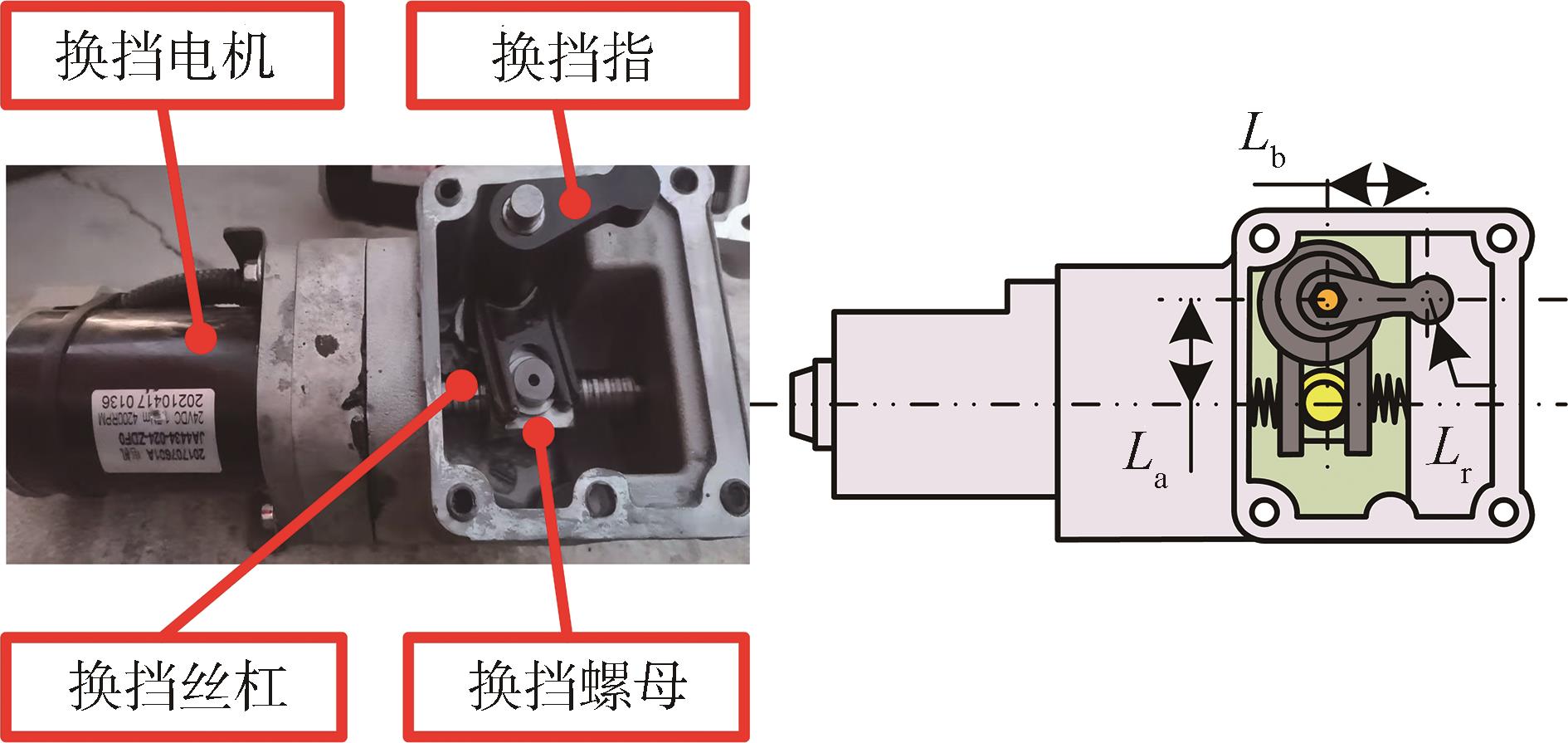
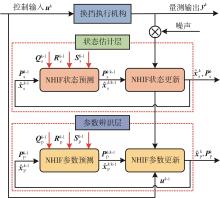
图7
DNHIF分层状态估计和参数辨识方法原理图"

图8
执行机构状态估计算法流程图"


图9
执行机构参数辨识算法流程图"

图10
分层状态估计器及参数辨识算法流程"

图11
基于自动标定的参数辨识流程"
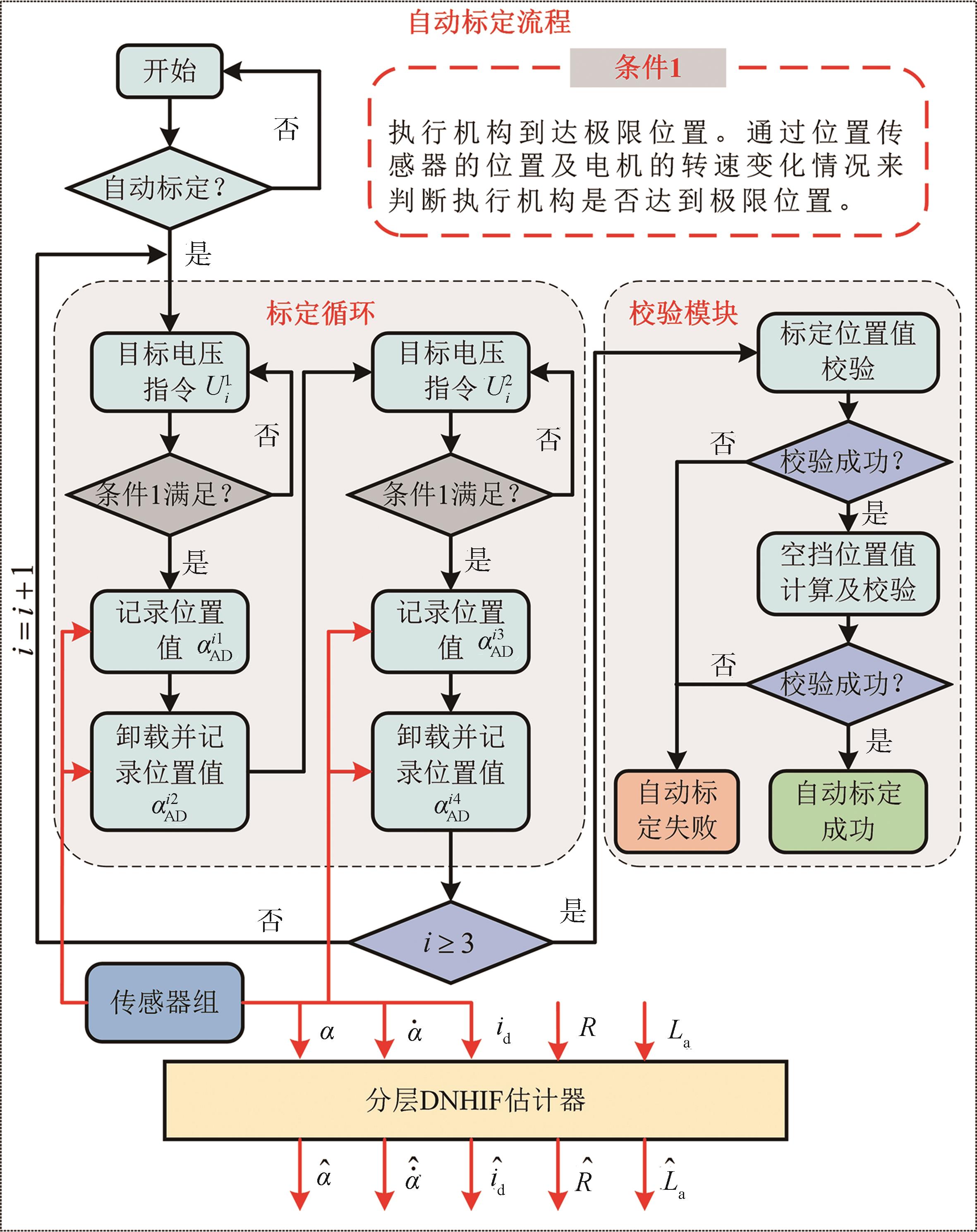
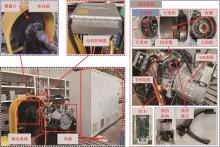
图12
实验台架"

表1
换挡执行机构基本参数"
| 部件 | 项目 | 参数 | 备注 |
|---|---|---|---|
| 直流电机 | 电压平台 | 27 V | |
| 空载电流 | 2 A | 该电流为最大 空载电流 | |
| 空载转速 | 3 900 r·min-1 | ||
| 0.9 N·m负载电流 | 22 A | 该电流为 0.9 N·m负载 最大电流 | |
| 0.9 N·m负载转速 | 2 100 r·min-1 | ||
| 1.55 N·m堵转电流 | 38 A | 该电流为 1.55 N·m负载最大电流 | |
| 电磁转矩系数 | 0.055 7 | ||
| 反电势系数 | 0.055 7 | ||
| 电枢电阻 | 0.632 | ||
| 电枢电感 | 0.005 H | ||
| 空载阻力矩 | 0.111 N·m | ||
| 转子转动惯量 | 0.000 1 kg·m2 | ||
| 换挡机构 | 35 mm | 丝杠到换挡指旋转轴的垂直距离 | |
| 35 mm | 换挡指力臂的 最大值 | ||
| 丝杠转动惯量 | 0.000 513 267 kg·m2 | ||
| 螺母质量 | 0.032 02 kg | ||
| 换挡指惯量 | 0.001 158 416 kg·m2 | ||
| 丝杠进给效率 | 0.9 |
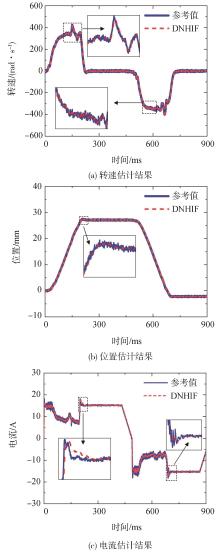
图13
执行机构状态估计结果"


图14
执行机构参数辨识结果"


图15
执行机构状态估计对比结果"

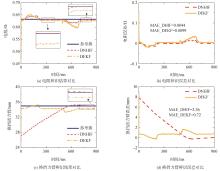
图16
执行机构参数辨识对比结果"

表2
不同算法状态估计和参数辨识MAE值"
| 参数 | 电机转速/(rad·s-1) | 换挡 位置/mm | 电机 电流/A | 电机 电阻/Ω | 换挡 力臂/mm |
|---|---|---|---|---|---|
| DNHIF | 4.44 | 0.12 | 0.46 | 0.004 4 | 2.63 |
| DEKF | 5.33 | 0.14 | 1.05 | 0.009 9 | 0.72 |
| 结果对比 (基于 DEKF ) | -16.7% | -14.3% | -56.2% | -55.6% | 227% |
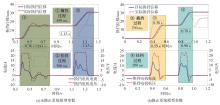
图17
系统模型参数对换挡性能的影响"
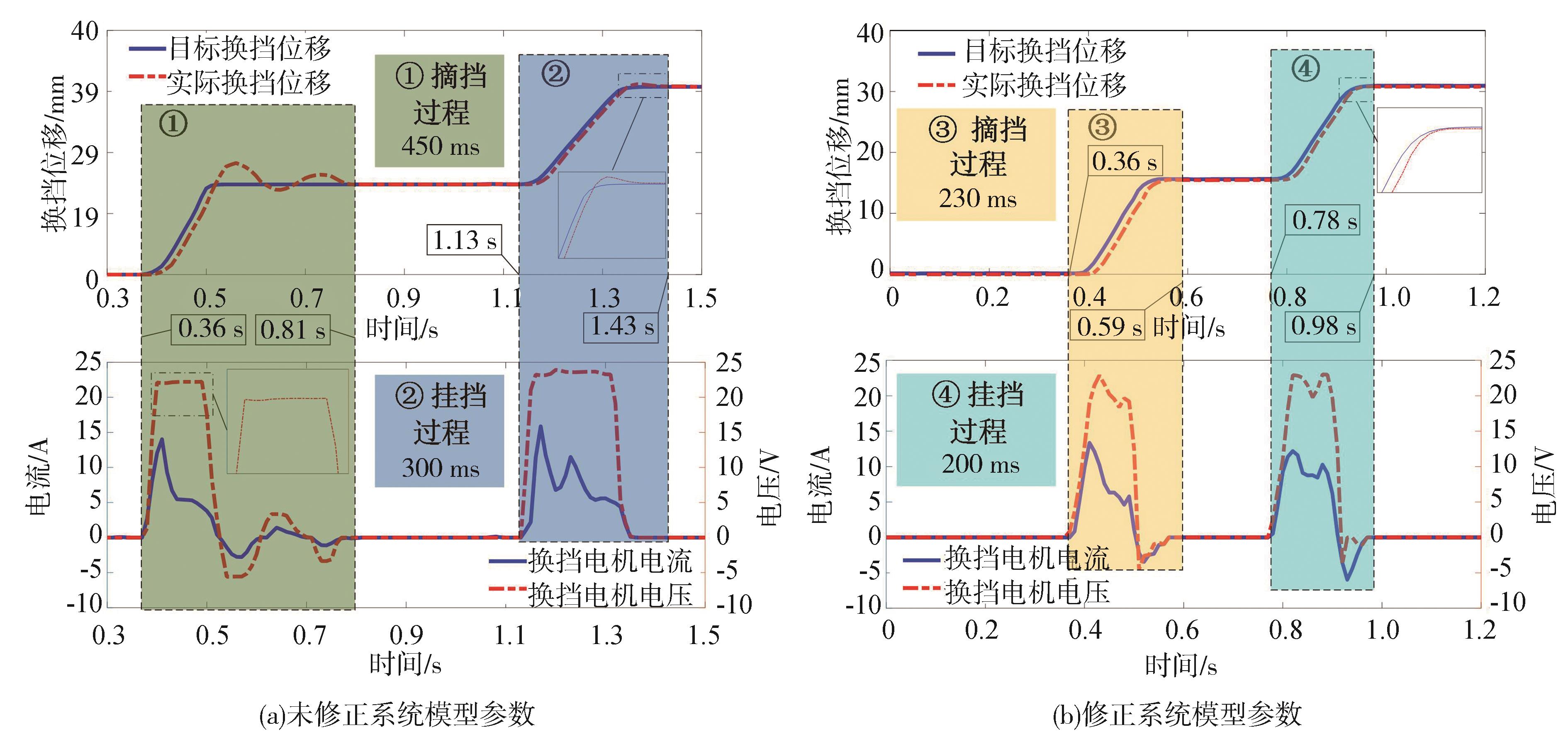
表3
修正模型参数和未修正模型参数换挡过程数据统计表"
| 参数 | 平均换挡电流/A | 最大换挡电流/A | 平均换挡电压/V | 最大换挡电压/V | 换挡时间/ms | 换挡位移跟踪误差/mm |
|---|---|---|---|---|---|---|
| 修正系统参数(状态1) | 4.48 | 13.36 | 12.12 | 22.98 | 620 | 0.23 |
| 未修正系统参数(状态2) | 3.14 | 15.85 | 11.17 | 23.08 | 1070 | 0.44 |
| 结果对比(基于状态2) | 42.68% | -15.71% | 8.50% | -0.43% | -42.06% | -47.73% |
| 1 | 刘志超, 郑天雷, 龚慧明, 等. 基于中国工况的纯电动乘用车续驶里程评价方法研究[J]. 汽车工程, 2021, 43(5): 705-712. |
| LIU Zhichao, ZHENG Tianlei, GONG Huiming, et al. Research on evaluation method of driving range of battery electric passenger vehicle based on china automotive test cycle[J]. Automotive Engineering, 2021, 43(5): 705-712. | |
| 2 | 郭景华,李文昌,王靖瑶,等. 智能电动汽车自适应巡航与再生制动多目标协同控制[J]. 汽车工程, 2020, 42(12): 1638-1646. |
| GUO Jinghua, LI Wenchang, WANG Jingyao, et al. Multi-objective integrated adaptive cruise and regenerative braking control of intelligent electric vehicles[J]. Automotive Engineering, 2020, 42(12): 1638-1646. | |
| 3 | 万钢. 《新能源汽车产业发展规划(2021-2035年)》为新能源汽车产业发展制定路线[J]. 变频器世界, 2020(4): 27-28. |
| WAN G. The "New Energy Vehicle Industry Development Plan (2021-2035)" sets out a route for the development of the new energy vehicle industry [J]. The World of Inverters, 2020 (4): 27-28. | |
| 4 | 国务院办公厅. 新能源汽车产业发展规划(2021-2035年)[EB/OL]. 2020-11-02. http://www.gov.cn/zhengce/content/2020-11/02/content_5556716.htm. |
| General Office of the State Council of the People's Republic of China. New energy vehicle industry development plan (2021-2035) [EB/OL]. 2020-11-02. http://www.gov.cn/zhengce/content/2020-11/02/content_5556716.htm. | |
| 5 | 林程. 北理工电动客车及奥运电动客车研发介绍[J]. 商用汽车, 2007(12): 48-51. |
| LIN C. Introduction of Beijing Institute of Technology electric bus and Olympic electric bus research and development [J]. Commercial Vehicle Magazine, 2007 (12): 48-51. | |
| 6 | 林歆悠, 伍家鋆, 魏申申. 双电机耦合驱动电动汽车驱动模式划分与优化[J]. 汽车工程, 2020, 42(4): 425-430. |
| LIN Xinyou, WU Jiayun, WEI Shenshen. Division and optimization of driving modes of electric vehicles with dual-motor coupling-propulsion powertrain[J]. Automotive Engineering, 2020, 42(4): 425-430. | |
| 7 | 赵明杰. 双电机耦合变速驱动系统控制策略及换挡机理研究[D]. 北京: 北京理工大学, 2021. |
| ZHAO M J. Research on optimal control strategy and shifting mechanism for dual-motor-transmission coupling propulsion system [D]. Beijing: Beijing Institute of Technology, 2021. | |
| 8 | 程一帆, 李雪松, 高炳钊, 等.基于显式控制律设计的AMT电控系统开发流程与验证[J].汽车工程,2021,43(5):762-769. |
| CHENG Yifan, LI Xuesong, GAO Bingzhao, et al. Development procedure and verification of AMT electrical control system based on explicit control law design[J]. Automotive Engineering, 2021,43(5):762-769. | |
| 9 | TIAN Feng, SUI Liqi, ZENG Yuanfan, et al. Hardware design and test of a gear‑shifting control system of a multi‑gear transmission for electric vehicles[J]. Automotive Innovation, 2019, 2:212-222. |
| 10 | SHIMOJO K, YASUI Y, SHIMABUKURO E, et al. New concept sliding mode control for AMT[C]. SAE Paper 2005-01-1594. |
| 11 | KIM Sooyoung, OH Jiwon, CHOI Seibum. Gear shift control of a dual-clutch transmission using optimal control allocation [J]. Mechanism and Machine Theory, 2017, 113:109-125. |
| 12 | MENG F, TAO G, CHEN H. Smooth shift control of an automatic transmission for heavy-duty vehicles [J]. Neurocomputing, 2015, 159: 197-206. |
| 13 | SEBASTIAN D, SMYTH R R. Method for controlling AMT system including wheel lock-up detection and tolerance[J]. International Journal of Heave Vehicle System, 2016, 4(6): 25-34. |
| 14 | 候延超. 机械式自动变速器选换挡执行机构位置精确控制研究[D]. 秦皇岛: 燕山大学, 2018. |
| HOU Y C. Research on position accurate control of gearshift actuator for mechanical automatic transmission [D]. Qinhuangdao: Yanshan University, 2018. | |
| 15 | 任玉平, 葛安林. 全电式AMT选换挡系统模糊控制方法研究[J]. 汽车技术, 2004 (8): 11-14. |
| REN Y P, GE A L. Fuzzy control method for the electronic control led and electric gear selecting and shifting system of AMT [J]. Automobile Technology, 2004, (8): 11-14. | |
| 16 | 申业, 吴光强, 罗先银, 等. AMT换挡电机的精确跟踪控制[J]. 汽车技术, 2017, 4(6): 1-4. |
| SHEN Y, WU G Q, LUO X Y, et al. Precise tracking control of AMT electric shift actuator [J]. Automobile Technology, 2017, 4(6): 1-4. | |
| 17 | 隋立起, 王立军, 田丰, 等. 机械式自动变速器换挡拨叉运动状态估计[J]. 吉林大学学报(工学版), 2020, 50(4): 1209-1216. |
| SUI L Q, WANG L J, TIAN F, et al. Shift fork motion estimation in mechanical automatic transmission [J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(4): 1209-1216. | |
| 18 | 朱会柱, 汪秀, 袁斌. 基于MOS开关的高频高压脉冲源中电磁兼容问题研究[J]. 电子技术, 2011, 38(3): 34-36. |
| ZHU H Z, WANG X, YUAN B. Investigation on the EMC in HF-HV pulse generator based on MOS switch [J]. Electronic Technology, 2011, 38(3): 34-36. | |
| 19 | 蒋元广, 李浩楠, 彭剑坤, 等. 纯电动客车AMT多参数融合换挡规律研究[J]. 机械传动, 2019, 43(7): 21-26. |
| JIANG Y G, LI H N, PENG J K, et al. Research of the AMT multi parameter fusion shift rule of pure electric bus [J]. Journal of Mechanical Transmission, 2019, 43(7): 21-26. | |
| 20 | 夏光, 涂波涛, 唐希雯, 等. 基于质量与坡度辨识的汽车自动变速器换挡控制研究[J]. 汽车工程, 2018, 40(3): 305-312,341. |
| XIA G, XU B T, TANG X W, et al. A research on shift control of vehicle automatic transmission based on vehicle mass and road slope identification [J]. Automotive Engineering, 2018, 40(3): 305-312,341. | |
| 21 | 史俊武, 鲁统利, 李小伟, 等. 自动变速车辆坡道行驶自适应换挡策略[J]. 农业机械学报, 2011, 42(4): 1-7. |
| SHI J W, LU T L, LI X W, et al. Self-adaptive slope gearshift strategy for automatic transmission vehicles. [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(4): 1-7. | |
| 22 | 雷雨龙, 付尧, 刘科. 基于扩展卡尔曼滤波的车辆质量与道路坡度估计[J]. 农业机械学报, 2014, 45(I 1): 9-14. |
| LEI Y L, FU Y, LIU K. Vehicle mass and road grade estimation based on extended Kalman filter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(I 1): 9-14. | |
| 23 | LINGMAN P, SCHMIDTBAUER B. Road slope and vehicle mass estimation using Kalman filtering[J]. Vehicle System Dynamics, 2002, 37: 12-23. |
| 24 | CHENG C, CEBON D. Parameter and state estimation for articulated heavy vehicles[J]. Vehicle System Dynamics, 2011, 49(12): 399–418. |
| 25 | 宫新乐. 无人驾驶电动车队运动规划与分布式协同控制研究[D]. 北京: 北京理工大学, 2020. |
| GONG X L. Motion planning and distributed cooperative control for automated electric vehicle platoon [D]. Beijing: Beijing Institute of Technology, 2020. | |
| 26 | 于全庆. 电动汽车动力电池多状态联合估计及鲁棒性研究[D]. 北京: 北京理工大学, 2019. |
| YU Q Q. Research on multi-state joint estimation and robustness of lithium-ion battery in electric vehicle [D]. Beijing: Beijing Institute of Technology, 2019. |
| [1] | 孙晓强, 王玉麟, 胡伟伟, 蔡英凤, 陈龙, Wong Pak Kin. 基于轮胎分段仿射辨识模型的车辆行驶状态估计策略研究[J]. 汽车工程, 2023, 45(7): 1212-1221. |
| [2] | 陈建华,徐中明,张志飞. 基于轴距预瞄的非匀速工况车辆悬架状态估计[J]. 汽车工程, 2023, 45(6): 1040-1049. |
| [3] | 王俊峰,陈吉清,兰凤崇,刘青山,曾常菁. 燃料电池模型多尺度参数双代价函数的全局灵敏度分析[J]. 汽车工程, 2023, 45(3): 393-401. |
| [4] | 胡杰,陈锐鹏,张志豪,向博文,刘昊岩,朱琪,郭启翔. 基于RMPC的自动驾驶货车路径跟踪控制[J]. 汽车工程, 2023, 45(11): 2092-2103. |
| [5] | 黄文凯,程辉军,储爱华. 纯电重型商用车四电机系统动力性及经济性研究[J]. 汽车工程, 2023, 45(1): 70-76. |
| [6] | 王萍,弓清瑞,程泽,张吉昂. 基于AUKF的锂离子电池SOC估计方法[J]. 汽车工程, 2022, 44(7): 1080-1088. |
| [7] | 孙金磊,邹鑫,顾浩天,崔凯,朱金大. 基于FFRLS-EKF联合算法的锂离子电池荷电状态估计方法[J]. 汽车工程, 2022, 44(4): 505-513. |
| [8] | 蔡英凤,陆子恒,李祎承,陈龙,王海. 基于多传感器融合的紧耦合SLAM系统[J]. 汽车工程, 2022, 44(3): 350-361. |
| [9] | 曲俊龙,史文库,陈志勇. 汽车传动系扭振激励辨识与减振措施[J]. 汽车工程, 2022, 44(2): 264-271. |
| [10] | 夏秋,陈特,陈龙,徐兴,蔡英凤. 基于冗余信息融合的车辆质心侧偏角估计方法[J]. 汽车工程, 2022, 44(2): 280-289. |
| [11] | 高振海,温文昊,唐明弘,张建,陈国迎. 基于混合神经网络的汽车运动状态估计[J]. 汽车工程, 2022, 44(10): 1527-1536. |
| [12] | 章军辉,付宗杰,郭晓满,李庆,陈大鹏,赵野. 基于HS⁃FCM模糊聚类的快速多目标车辆跟踪算法[J]. 汽车工程, 2021, 43(10): 1419-1426. |
| [13] | 黄冉军, 周维, 王旭. 一种改进的动力电池阻抗参数和荷电状态分层在线联合估计方法*[J]. 汽车工程, 2020, 42(8): 1000-1007. |
| [14] | 王振峰, 李飞, 王新宇, 高普, 秦也辰. 车辆系统垂向与横向耦合的侧倾状态估计*[J]. 汽车工程, 2020, 42(5): 636-643. |
| [15] | 朱冰, 张培兴, 汪震, 赵健, 吴坚, 冯瑶. 半挂汽车列车主动气压制动系统建模与控制*[J]. 汽车工程, 2019, 41(9): 1050-1055. |
|