汽车工程 ›› 2022, Vol. 44 ›› Issue (2): 280-289.doi: 10.19562/j.chinasae.qcgc.2022.02.016
所属专题: 底盘&动力学&整车性能专题2022年
夏秋1,2,陈特1,陈龙1( ),徐兴1,蔡英凤1
),徐兴1,蔡英凤1
Qiu Xia1,2,Te Chen1,Long Chen1(),Xing Xu1,Yingfeng Cai1
摘要:
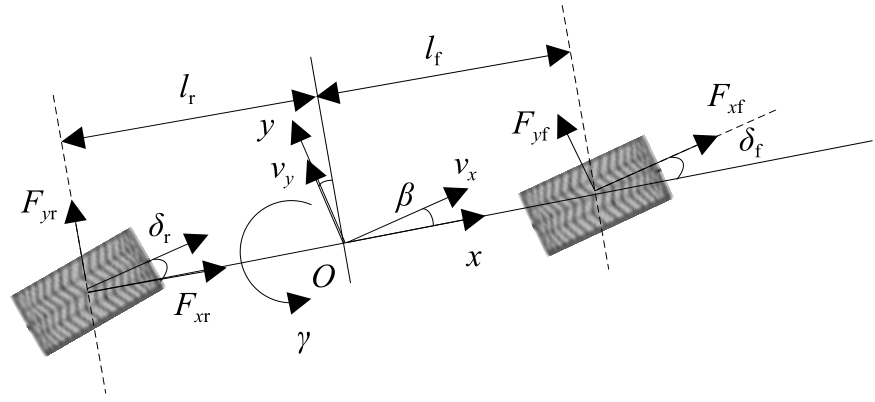
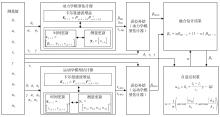
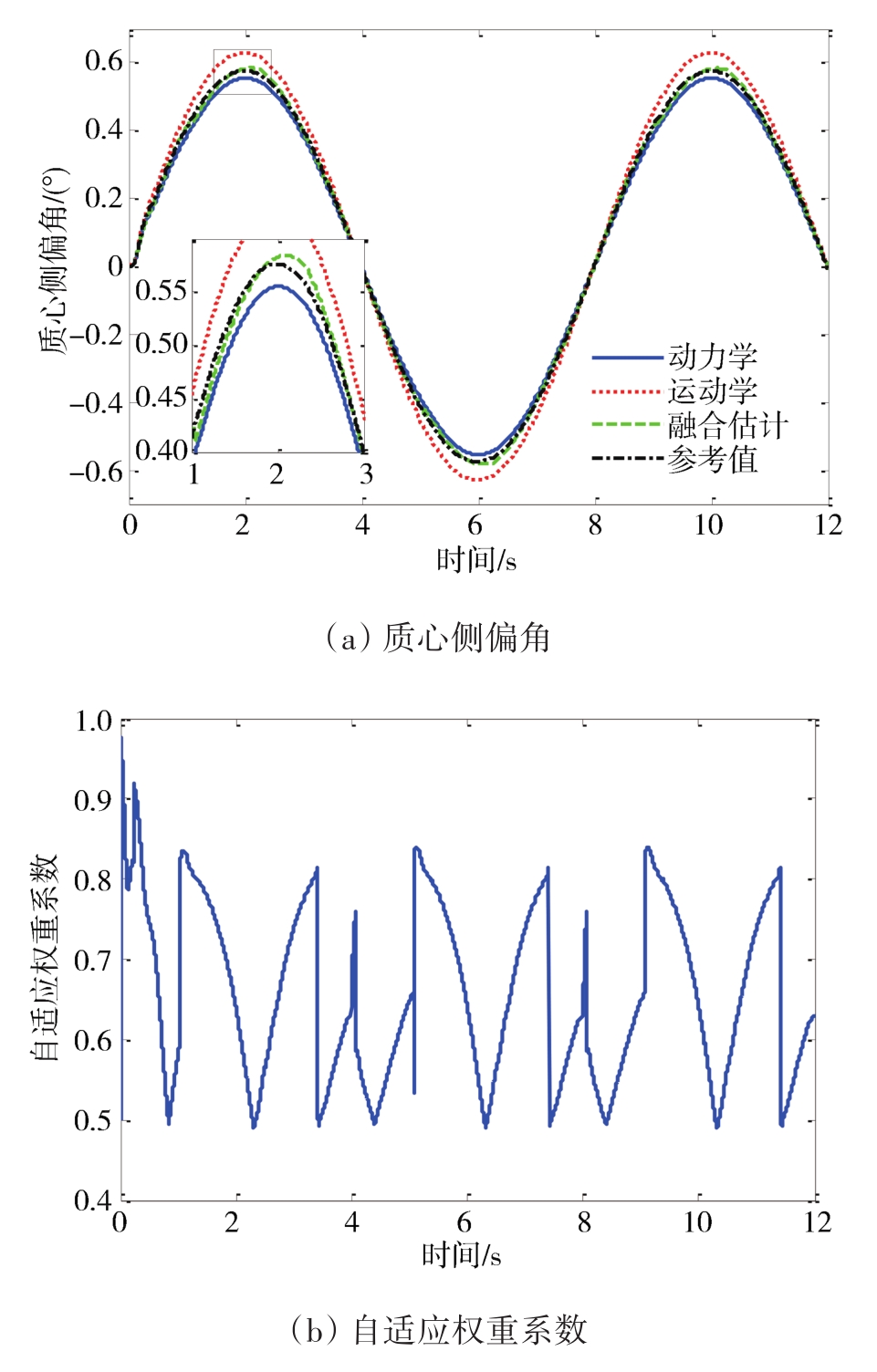
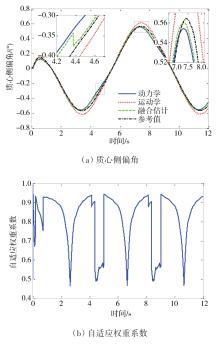
车辆质心侧偏角是表征车辆横向稳定性的重要参数之一,相关的估计方法研究可为整车稳定控制提供重要支撑。为提高车辆质心侧偏角估计效果,提出了一种基于冗余信息融合的质心侧偏角估计方法。分别建立了车辆动力学模型和运动学模型,利用容积卡尔曼滤波算法分别设计了用于车辆行驶状态估计的动力学模型估计器和运动学模型估计器,同时,分析了动力学模型估计器和运动学模型估计器的内在特性和适用范围,并在此基础上提出了基于冗余信息融合的车辆质心侧偏角估计方法,从而通过自适应权重动态调节的方式来充分结合动力学模型估计器和运动学模型估计器的优点。进行了CarSim-Simulink联合仿真测试与实车道路试验,结果表明,所设计的车辆质心侧偏角估计方法能有效提高车辆状态估计精度和多工况适应能力。