汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1200-1211.doi: 10.19562/j.chinasae.qcgc.2023.07.011
所属专题: 底盘&动力学&整车性能专题2023年
吴骁,史文库,陈志勇( )
)
收稿日期:2023-01-03
修回日期:2023-02-16
出版日期:2023-07-25
发布日期:2023-07-25
通讯作者:
陈志勇
E-mail:chen_zy@jlu.edu.cn
基金资助:
Xiao Wu,Wenku Shi,Zhiyong Chen()
Received:2023-01-03
Revised:2023-02-16
Online:2023-07-25
Published:2023-07-25
Contact:
Zhiyong Chen
E-mail:chen_zy@jlu.edu.cn
摘要:
针对固定状态观测器难以保证路面自适应悬架状态观测精度的问题,本文中在交互式多模型卡尔曼滤波(IMMKF)的基础上,建立了悬架状态观测器与控制器。首先基于LQG算法与模糊控制算法建立了路面自适应主动悬架系统。结合谐波叠加法,生成A-B-D-C级空间域路面不平度模型,作为仿真系统的输入。其次以各级路面的最优LQG模型为子模型建立了3种IMMKF悬架状态观测器与控制器。仿真对比表明:14模型的IMMKF悬架状态观测器相对于普通卡尔曼滤波观测器的观测精度最大可提升98.17%,并可用于识别路面等级,并且基于14模型IMMKF的自适应主动悬架控制器的车身加速度相对于被动悬架降低了75.99%、相对于普通LQG主动悬架降低了47.16%,验证了模型的优越性。
吴骁, 史文库, 陈志勇. 基于交互式多模型卡尔曼滤波的主动悬架控制[J]. 汽车工程, 2023, 45(7): 1200-1211.
Xiao Wu, Wenku Shi, Zhiyong Chen. Active Suspension Control Based on Interacting Multiple Model Kalman Filter[J]. Automotive Engineering, 2023, 45(7): 1200-1211.
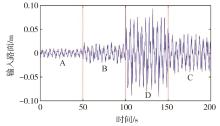
图1
路面输入"
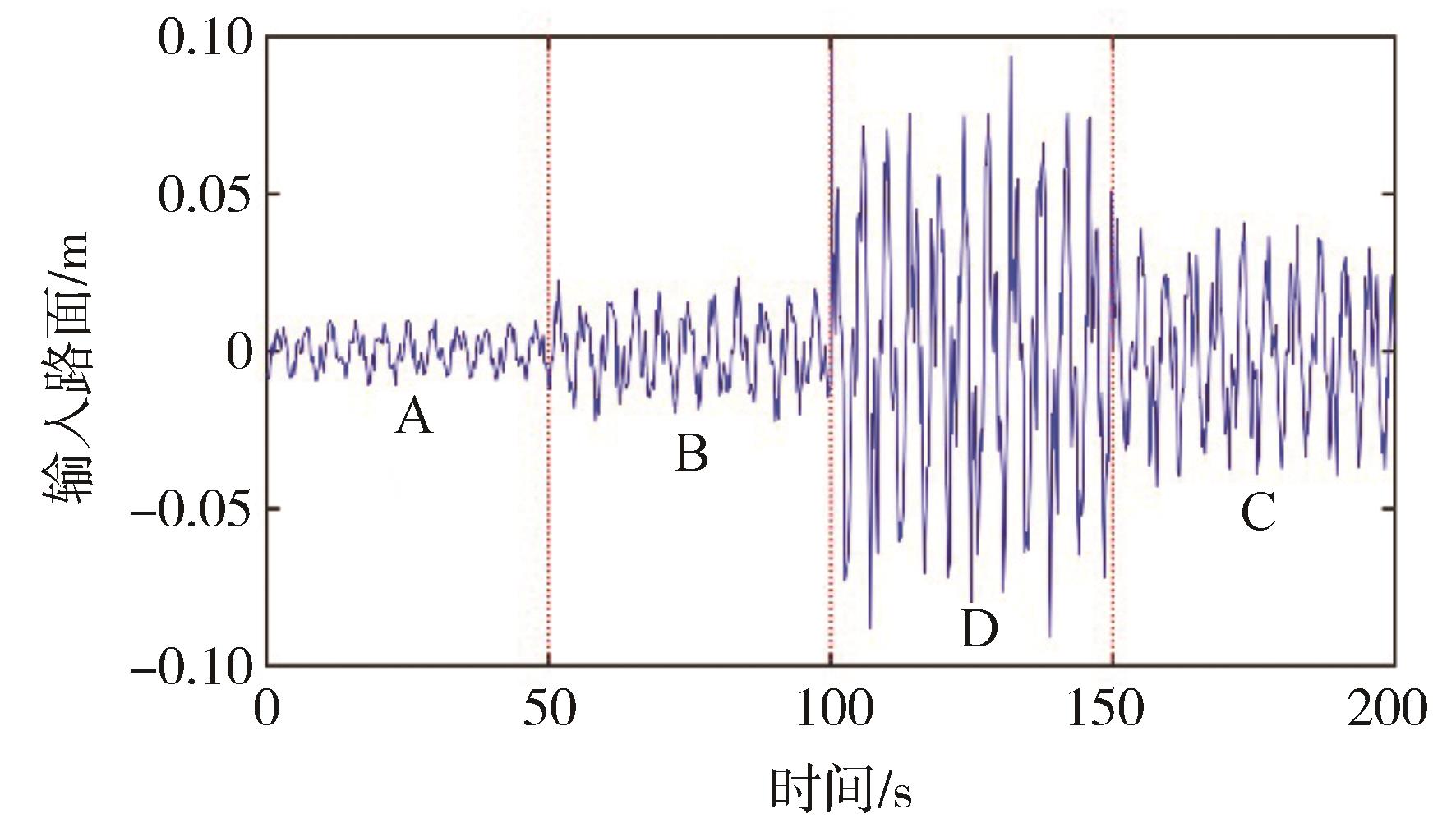

图2
1/4车辆模型"
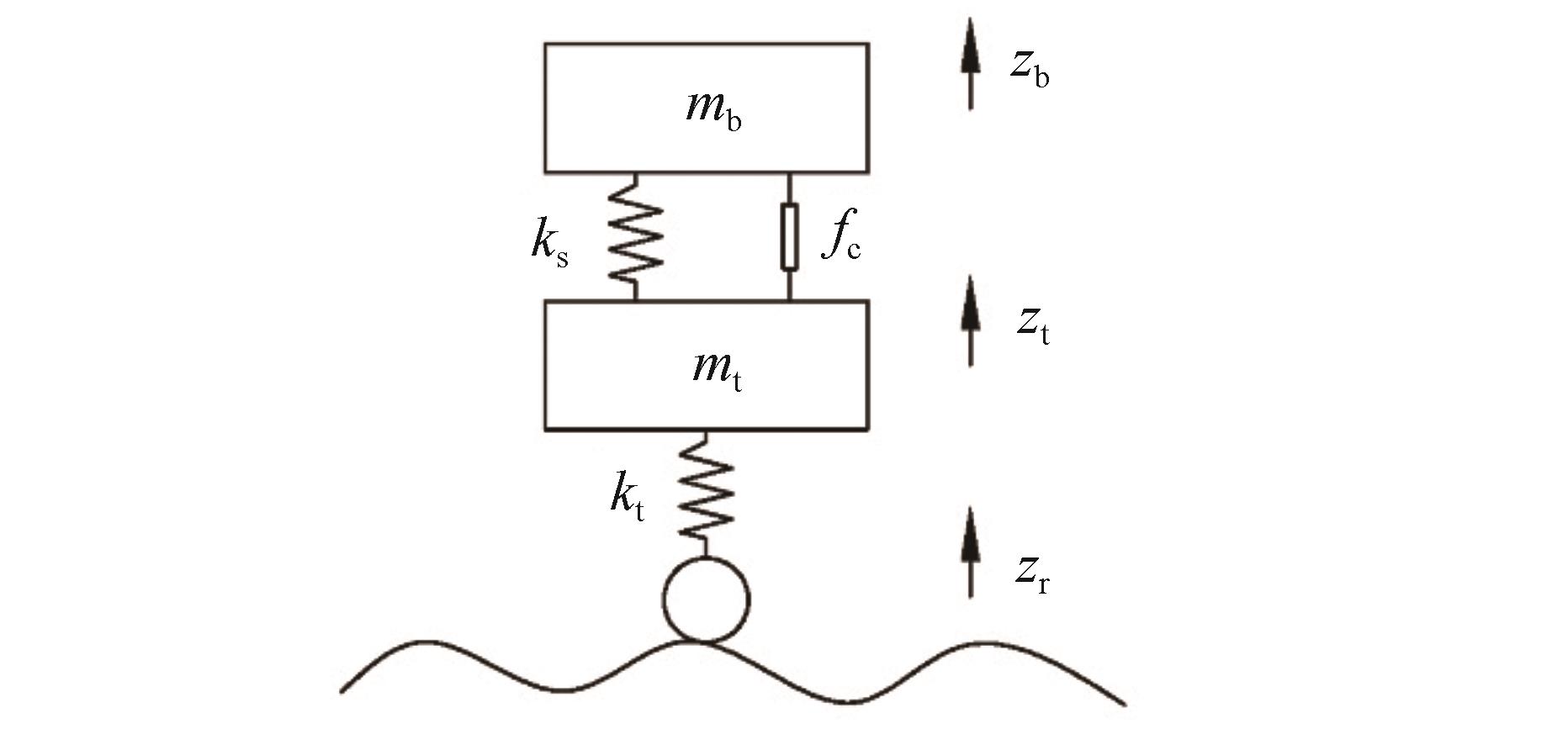
表1
悬架模型参数"
| 参数 | 单位 | 取值 |
|---|---|---|
簧上质量 簧下质量 悬架刚度 轮胎刚度 车速 | kg kg N/m N/m m/s | 240 30 16 000 160 000 20 |

图3
A级路面NSGA-II优化结果"

表2
各级路面LQR控制参数初选值"
| 路面等级 | A | B | C | D |
|---|---|---|---|---|
| 1 | 64 | 256 | 1 024 | |
| 1.543 8 | 1.476 5 | 1.361 6 | 1.264 6 | |
| 678 | 805 | 957 | 1 103 | |
| 0.000 1 | ||||
图4
车身加速度隶属度函数"
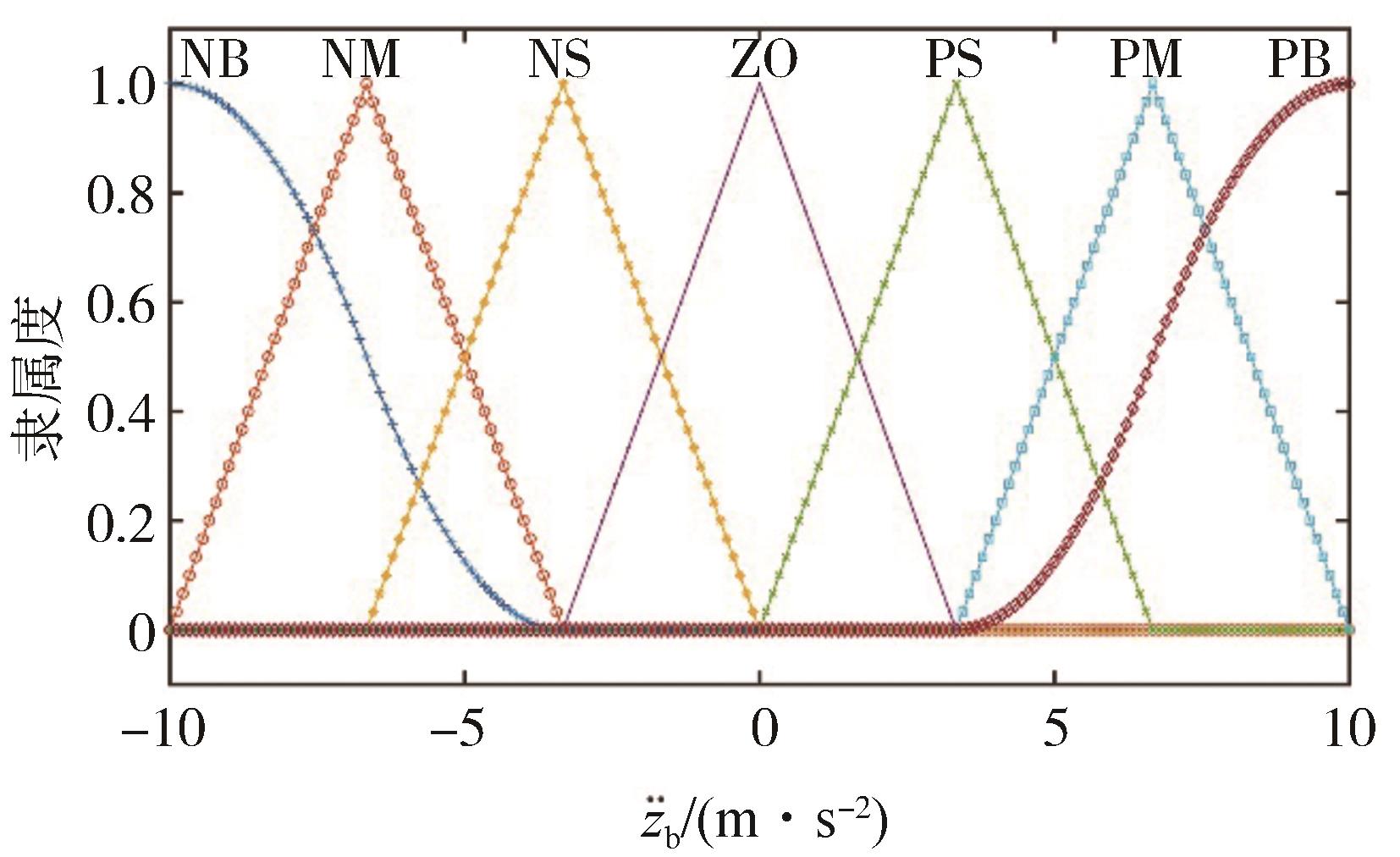
图5
q1隶属度函数"
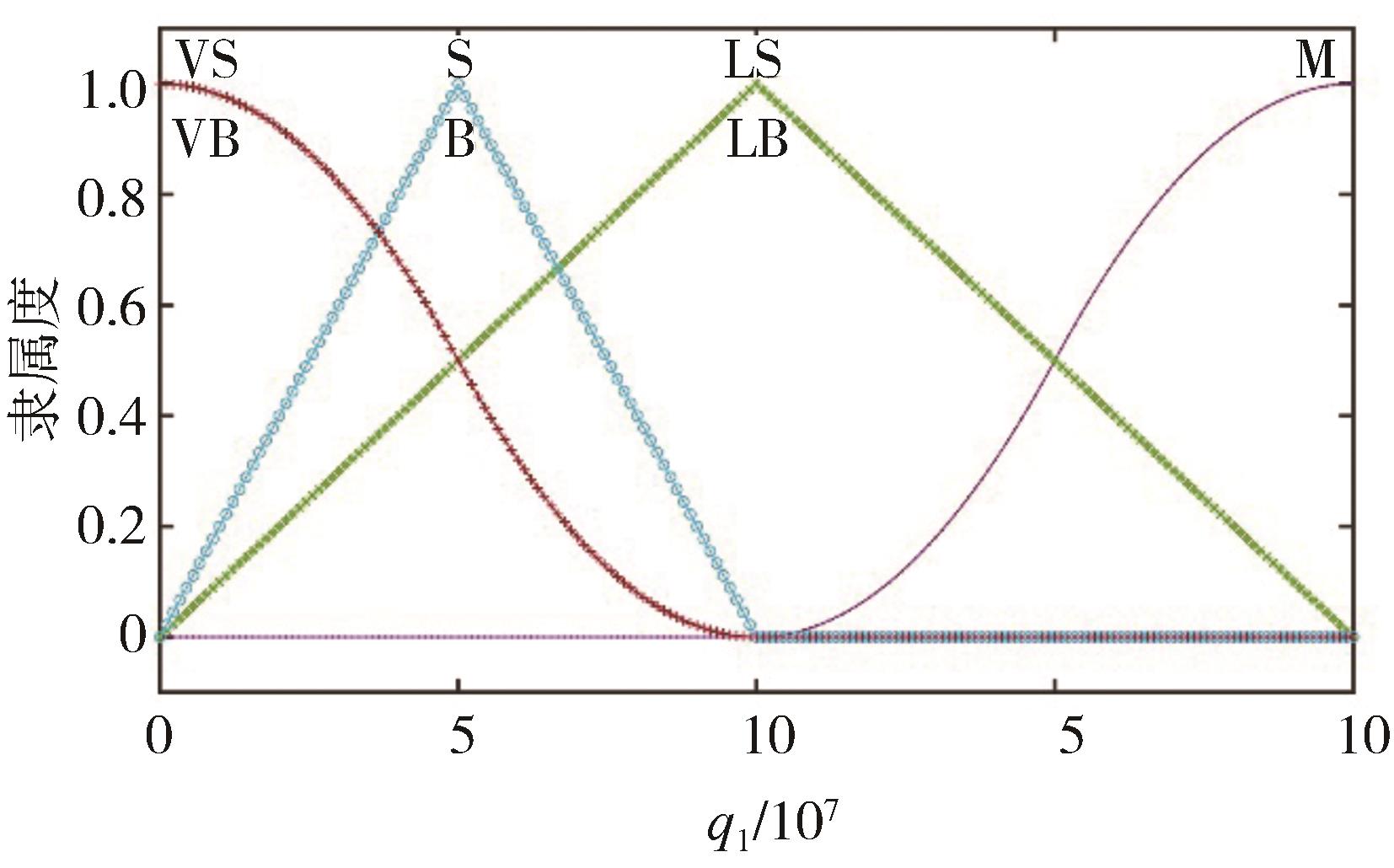
图6
q2隶属度函数"
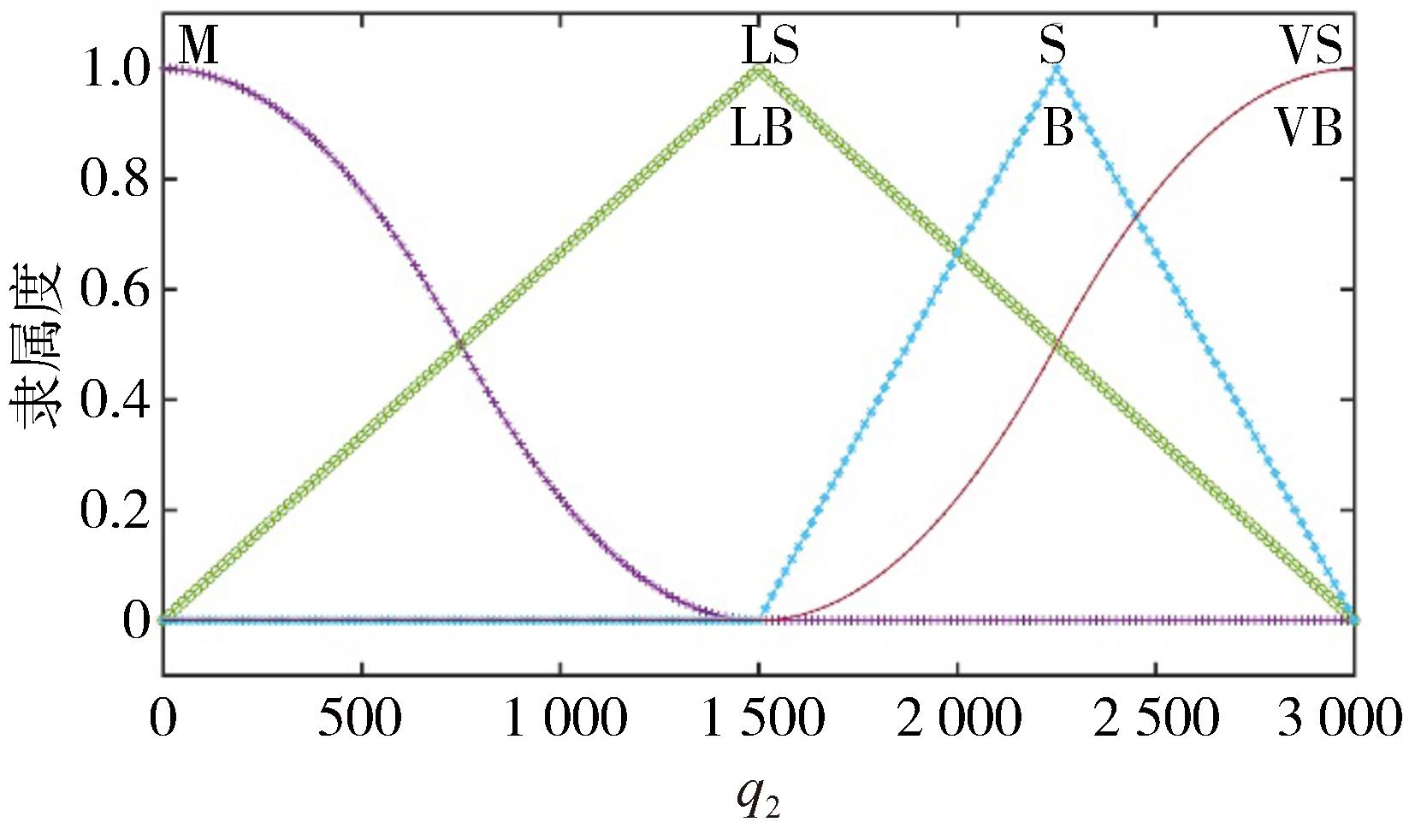
图7
z¨b与q1的关系图"
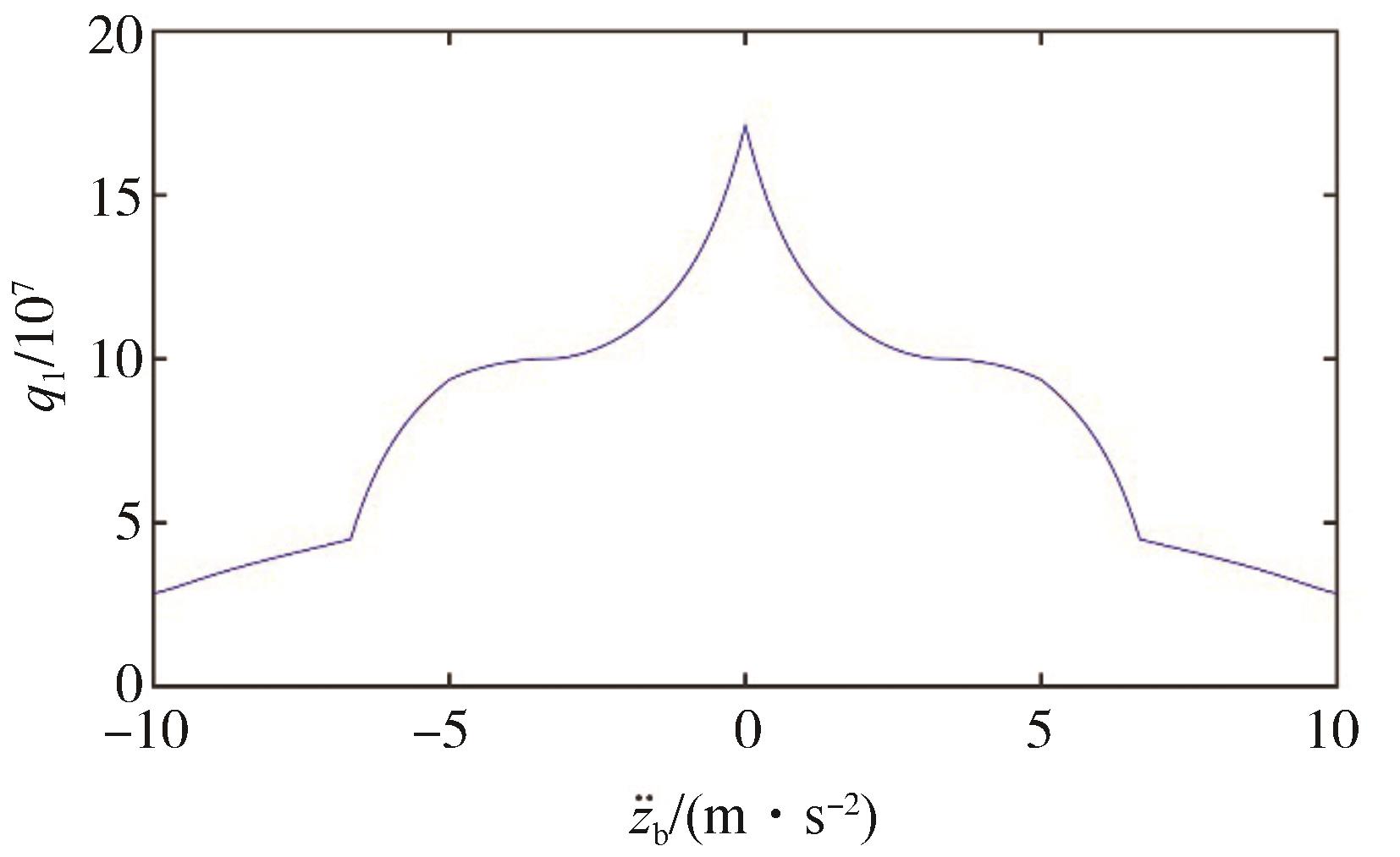
图8
z¨b与q2的关系图"
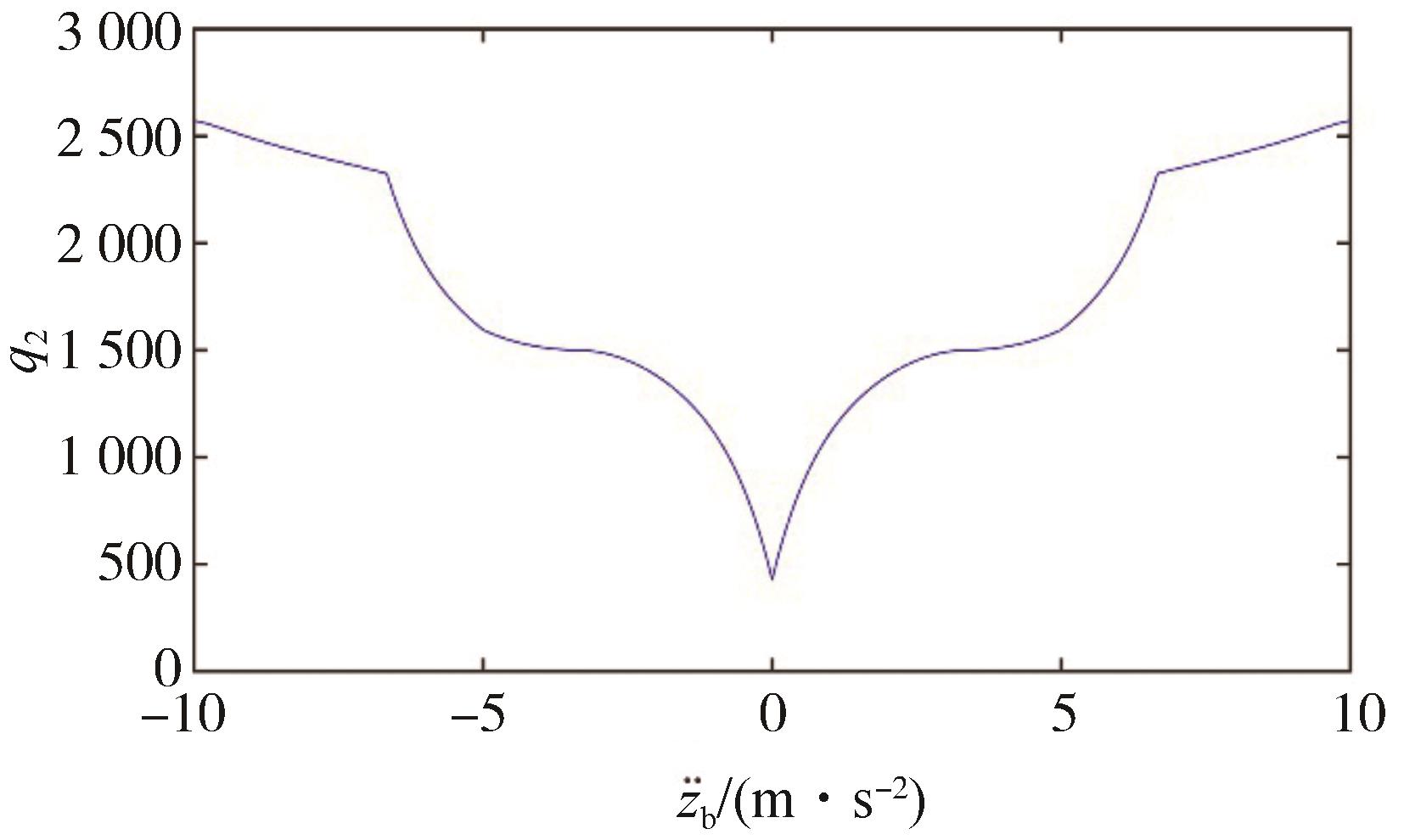
图9
悬架响应-车身加速度"
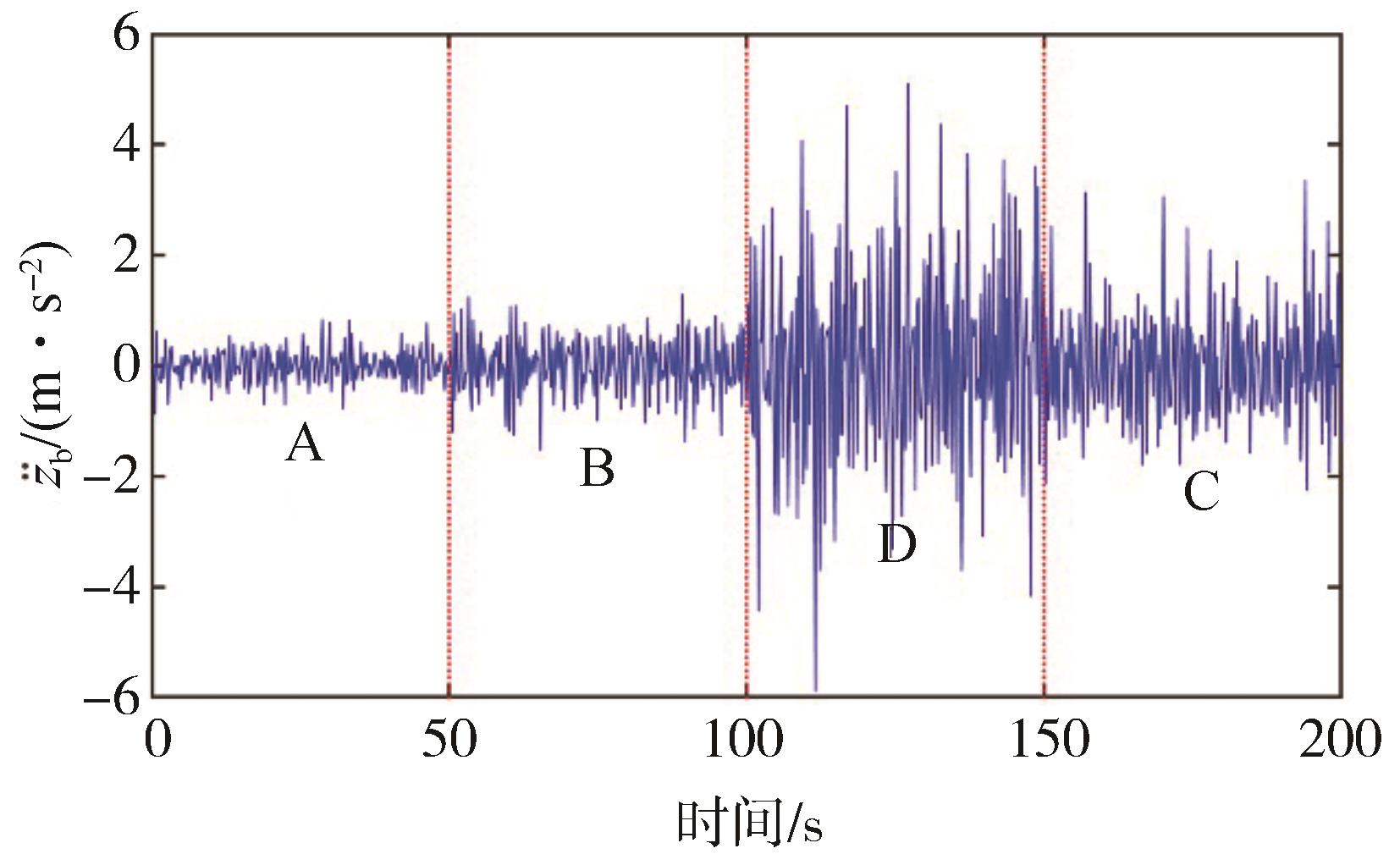
图10
悬架响应-悬架动挠度"
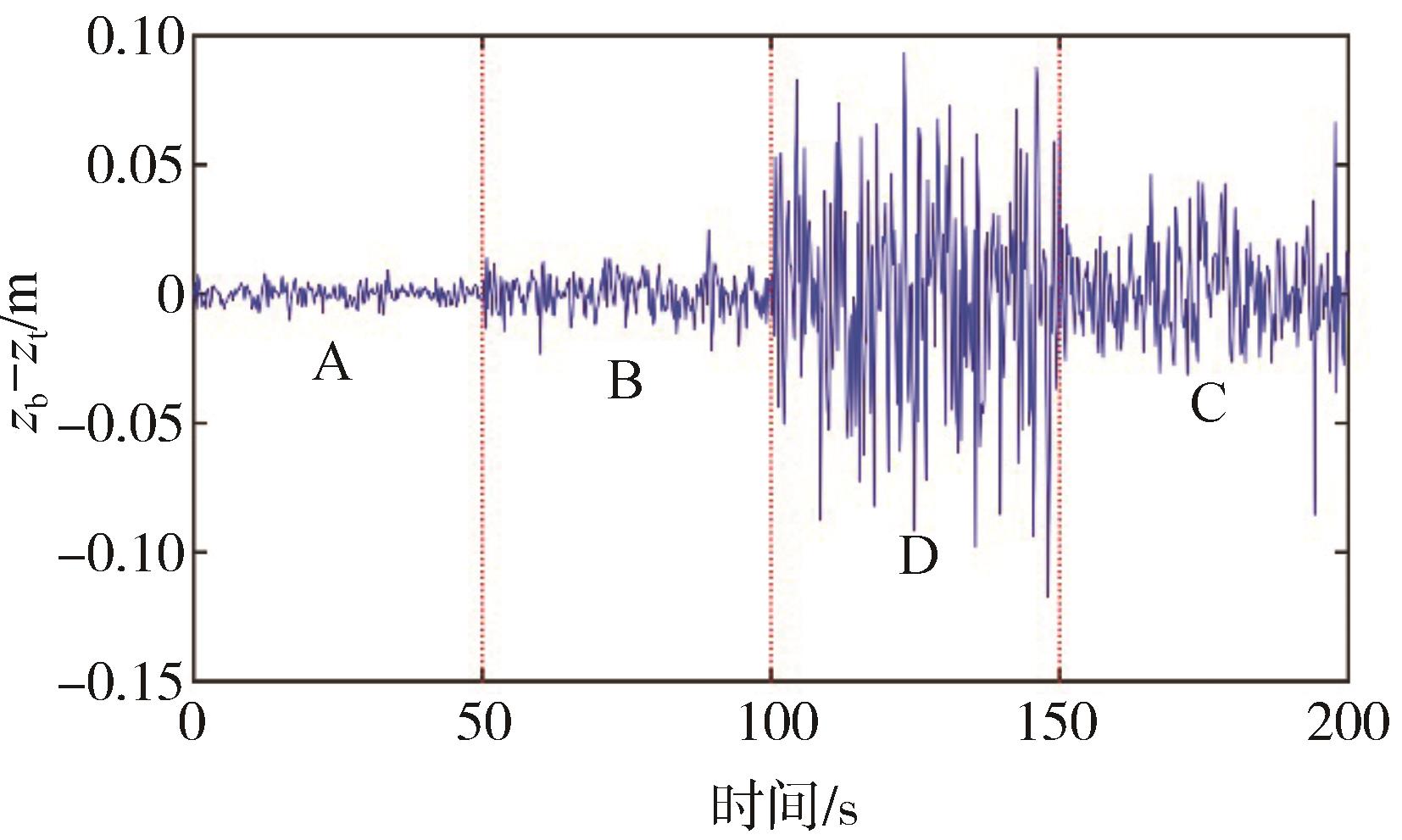
图11
悬架响应-轮胎动变形"
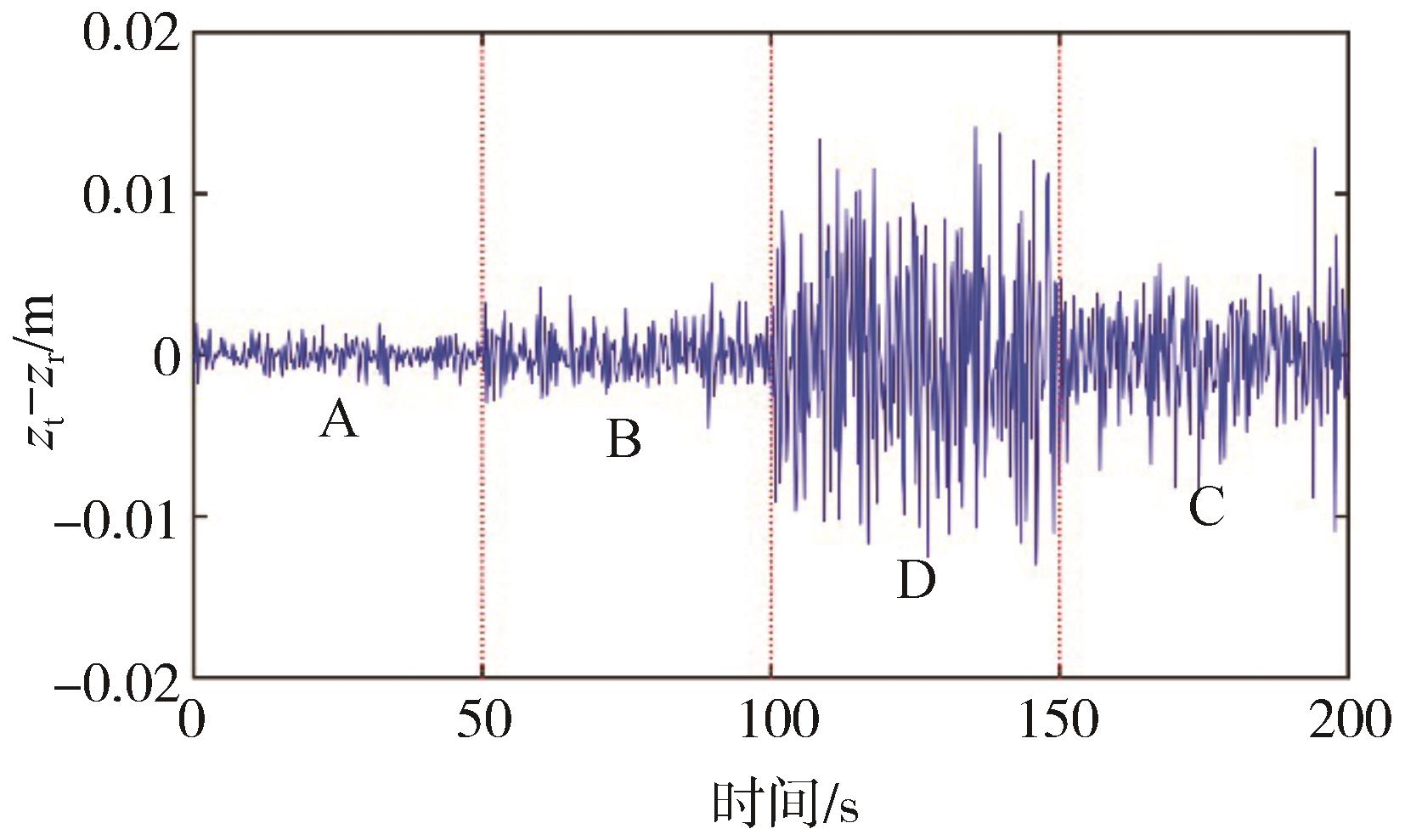
表3
路面自适应主动悬架输出结果"
| 项目 | A | B | C | D |
|---|---|---|---|---|
| 0.307 9 | 0.631 0 | 1.060 7 | 1.692 9 | |
| 0.003 3 | 0.008 5 | 0.019 0 | 0.039 2 | |
| 0.011 2 | 0.022 3 | 0.058 0 | 0.120 9 | |
| 0.000 7 | 0.001 7 | 0.003 3 | 0.006 2 |
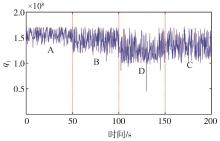
图12
q1结果"
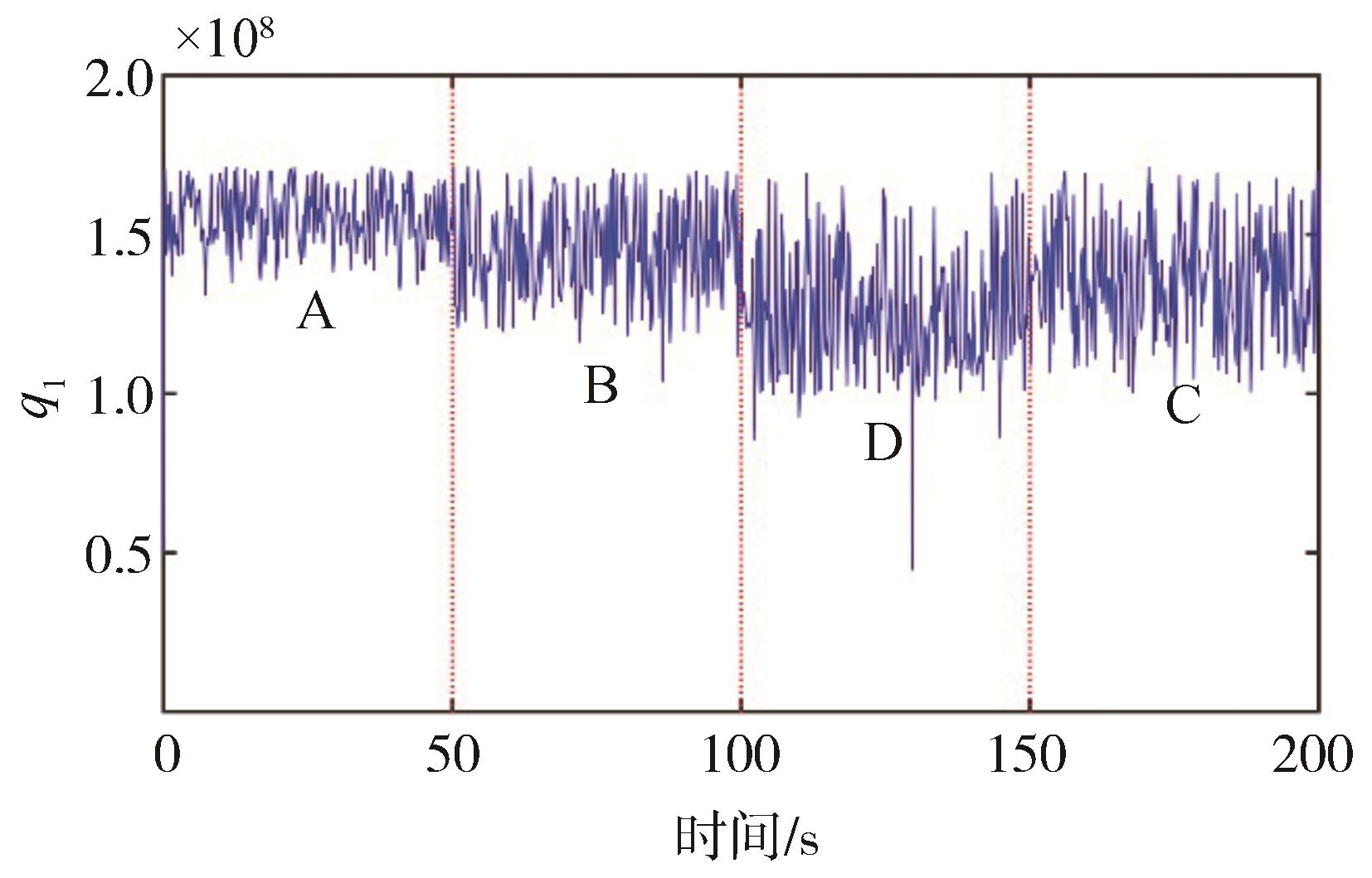
图13
q2结果"
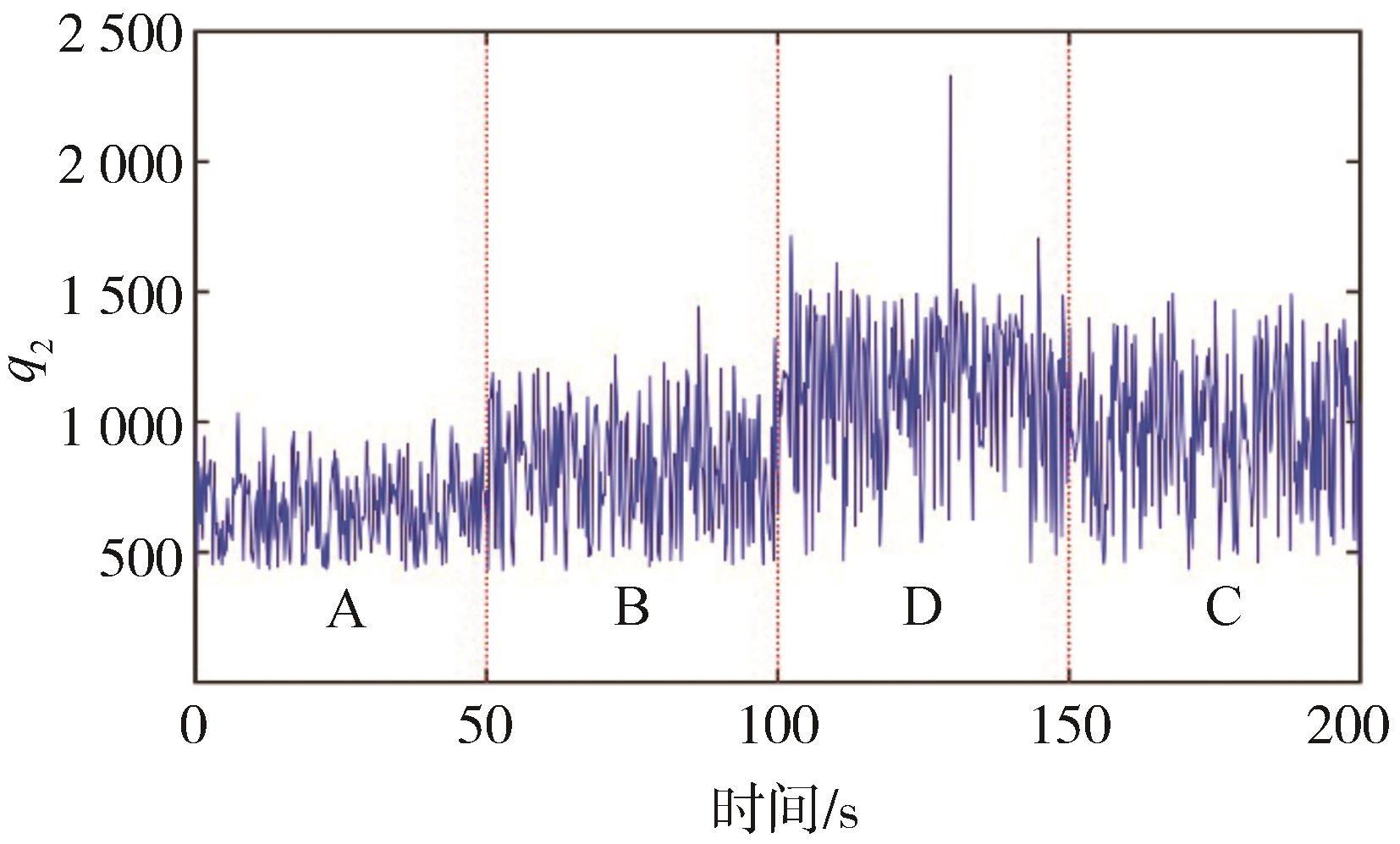
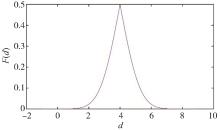
图14
A级路面转换概率图"
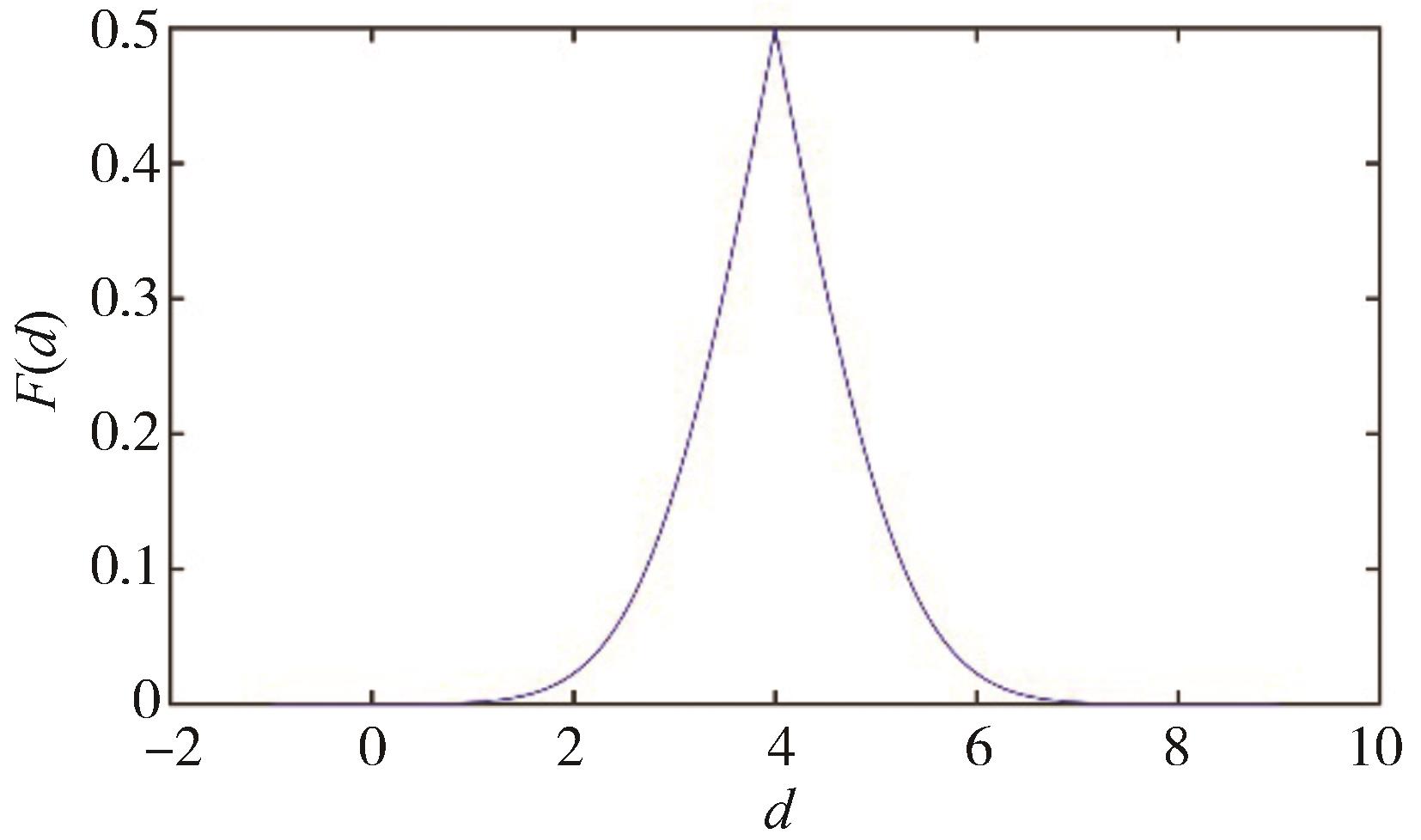
表4
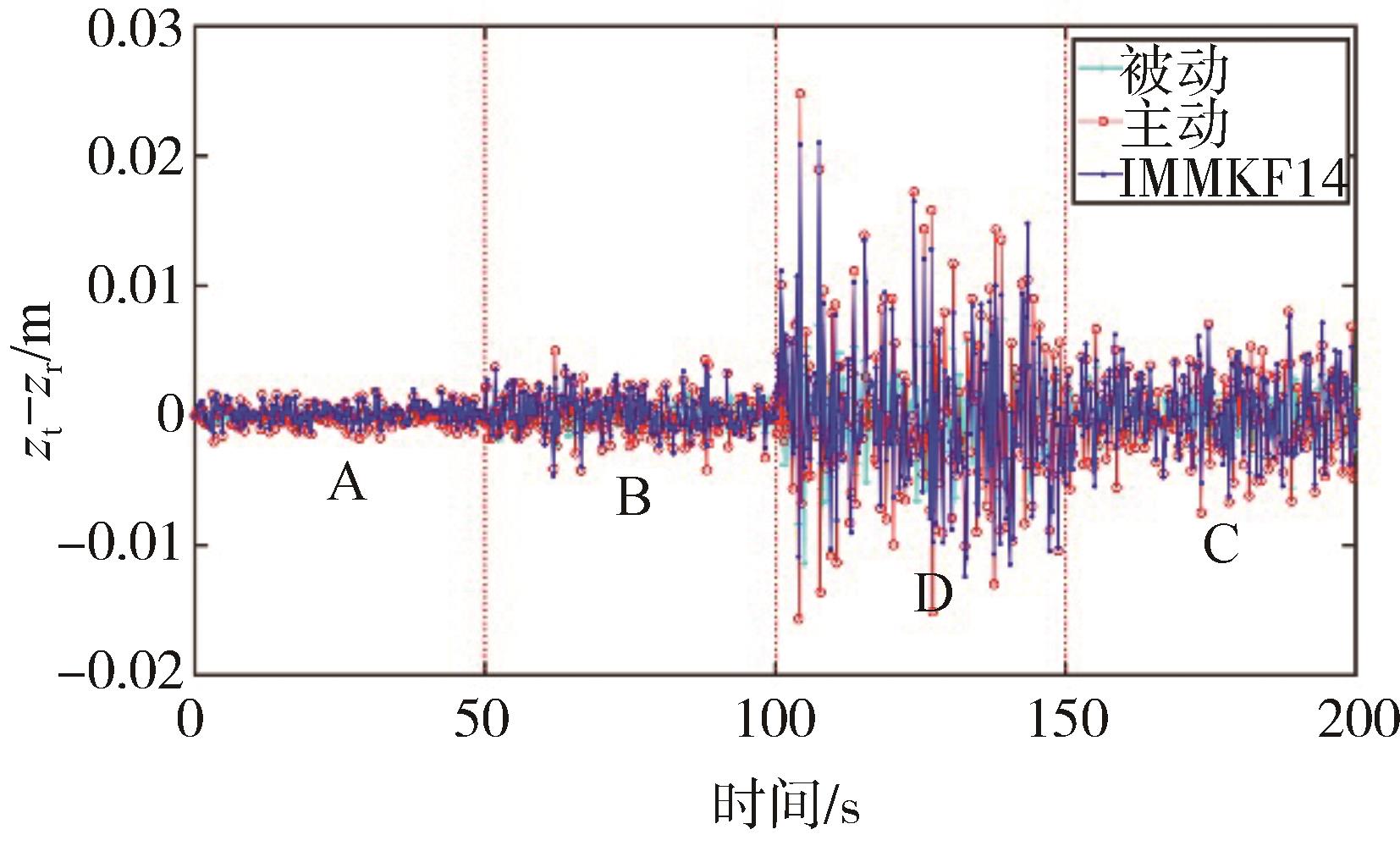
各级路面仿真结果误差对比 %"
| 观测量 | 模型 | A | B | D | C |
|---|---|---|---|---|---|
| IMMKF14 | 10.25 | 11.98 | 18.61 | 16.63 | |
| IMMKF7 | 22.71 | 14.79 | 18.34 | 16.71 | |
| IMMKF4 | 48.51 | 24.43 | 21.15 | 19.73 | |
| KF A | 63.79 | 36.24 | 38.06 | 37.98 | |
| KF C | 70.17 | 46.06 | 25.33 | 27.62 | |
| IMMKF14 | 3.40 | 1.69 | 0.32 | 0.58 | |
| IMMKF7 | 10.40 | 7.15 | 2.33 | 3.89 | |
| IMMKF4 | 21.56 | 13.30 | 5.00 | 7.98 | |
| KF A | 29.60 | 23.56 | 17.52 | 19.44 | |
| KF C | 34.65 | 20.90 | 6.82 | 12.32 | |
| IMMKF14 | 15.91 | 17.38 | 16.01 | 12.65 | |
| IMMKF7 | 18.86 | 18.03 | 16.75 | 13.27 | |
| IMMKF4 | 30.29 | 21.78 | 17.81 | 13.99 | |
| KF A | 41.48 | 32.61 | 35.49 | 31.56 | |
| KF C | 61.41 | 31.91 | 21.34 | 18.15 | |
| IMMKF14 | 4.09 | 1.93 | 3.19 | 2.87 | |
| IMMKF7 | 22.63 | 7.13 | 4.12 | 4.93 | |
| IMMKF4 | 66.79 | 16.54 | 6.81 | 13.14 | |
| KF A | 98.71 | 32.34 | 18.20 | 28.75 | |
| KF C | 70.99 | 34.50 | 11.61 | 26.33 |
表5
仿真结果误差对比 %"
| 观测量 | 模型 | A | B | C |
|---|---|---|---|---|
| IMMKF14 | 3.40 | 1.69 | 0.58 | |
| AUKF | 5.00 | 7.00 | 9.00 | |
| UKF | 13.00 | 16.00 | 20.00 | |
| IMMKF14 | 4.09 | 1.93 | 2.87 | |
| AUKF | 6.00 | 10.00 | 10.00 | |
| UKF | 15.00 | 18.00 | 22.22 |
图15
zb-zt结果误差"
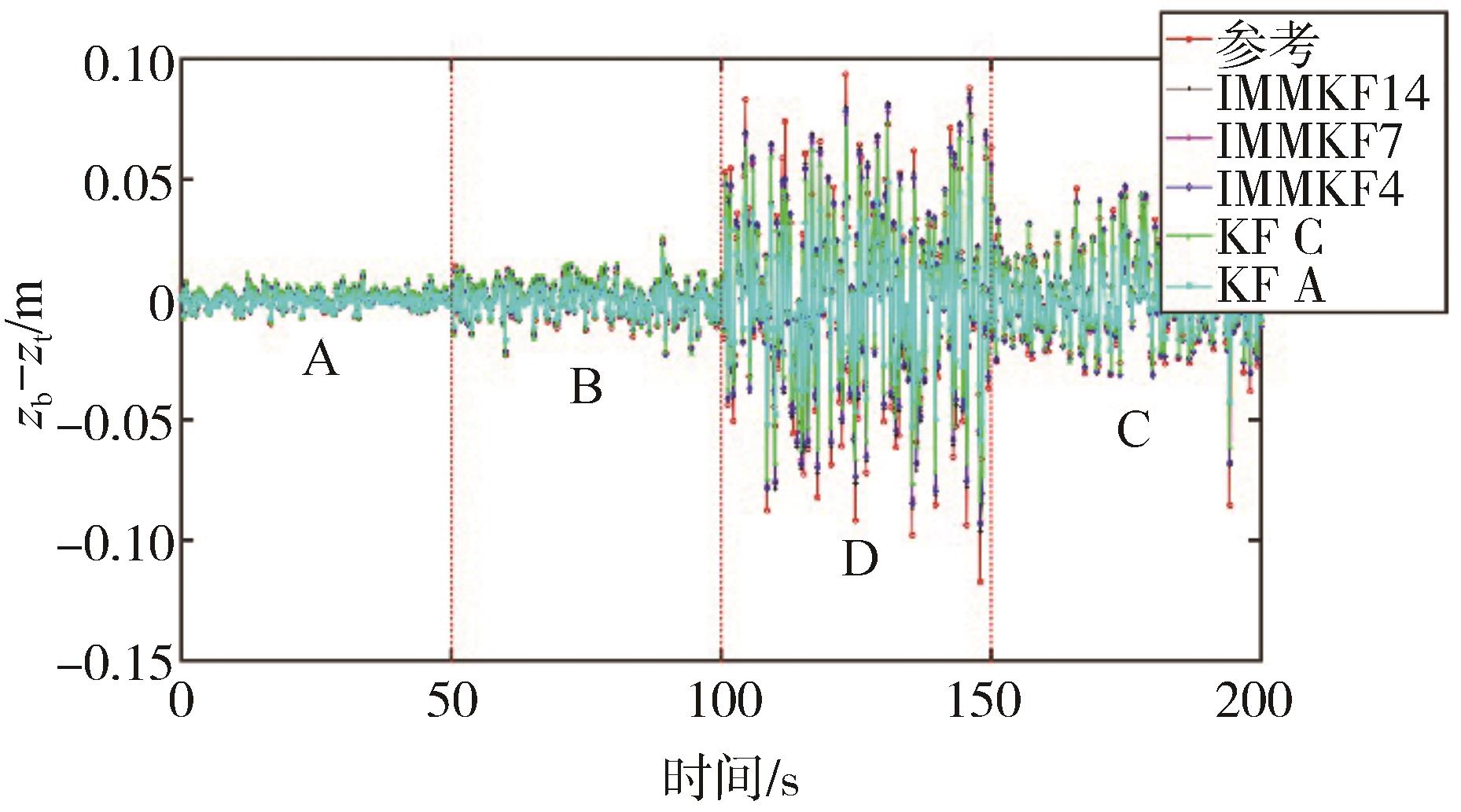
图16
z˙b结果误差"
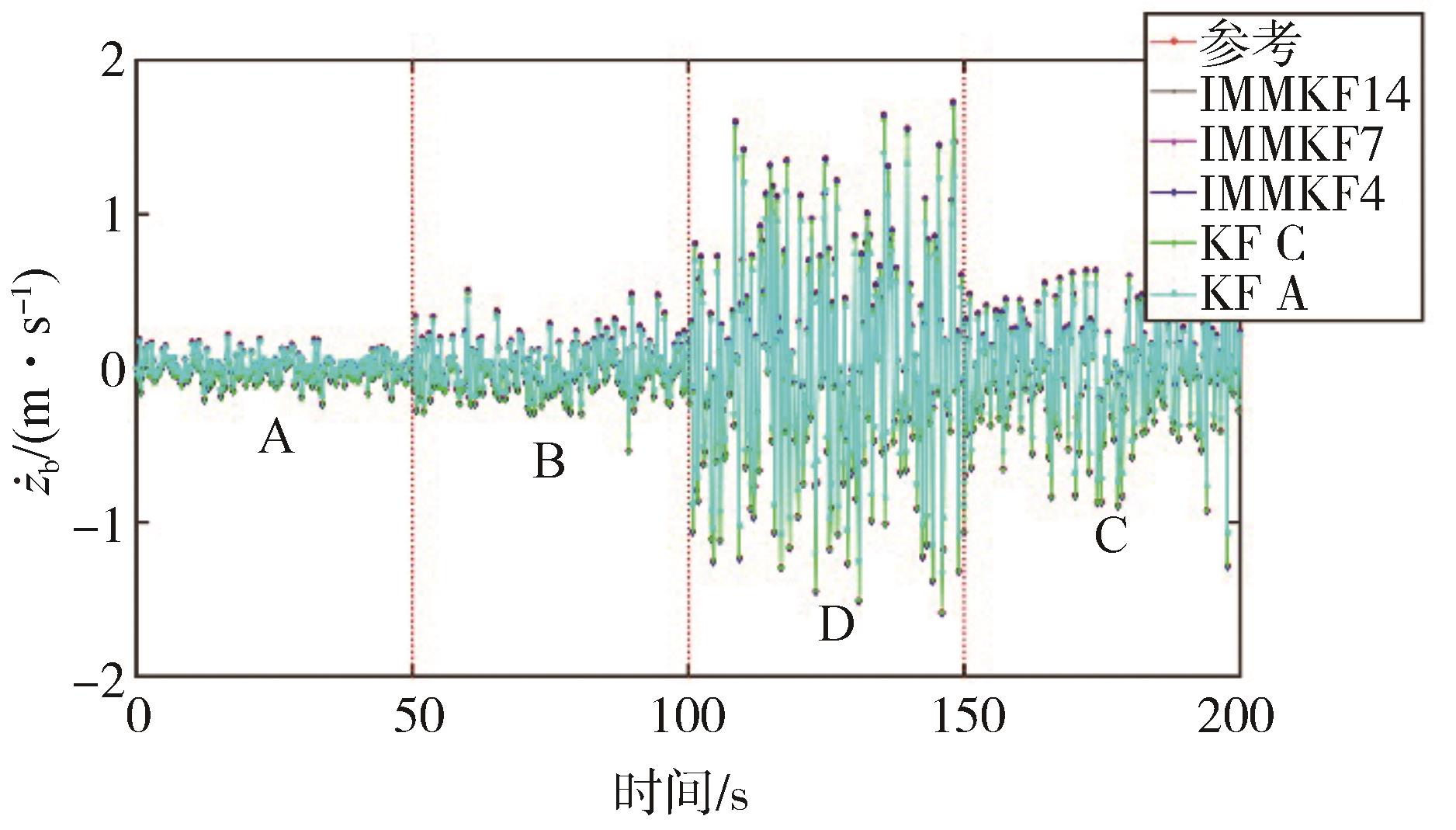
图17
zt-zr结果误差"
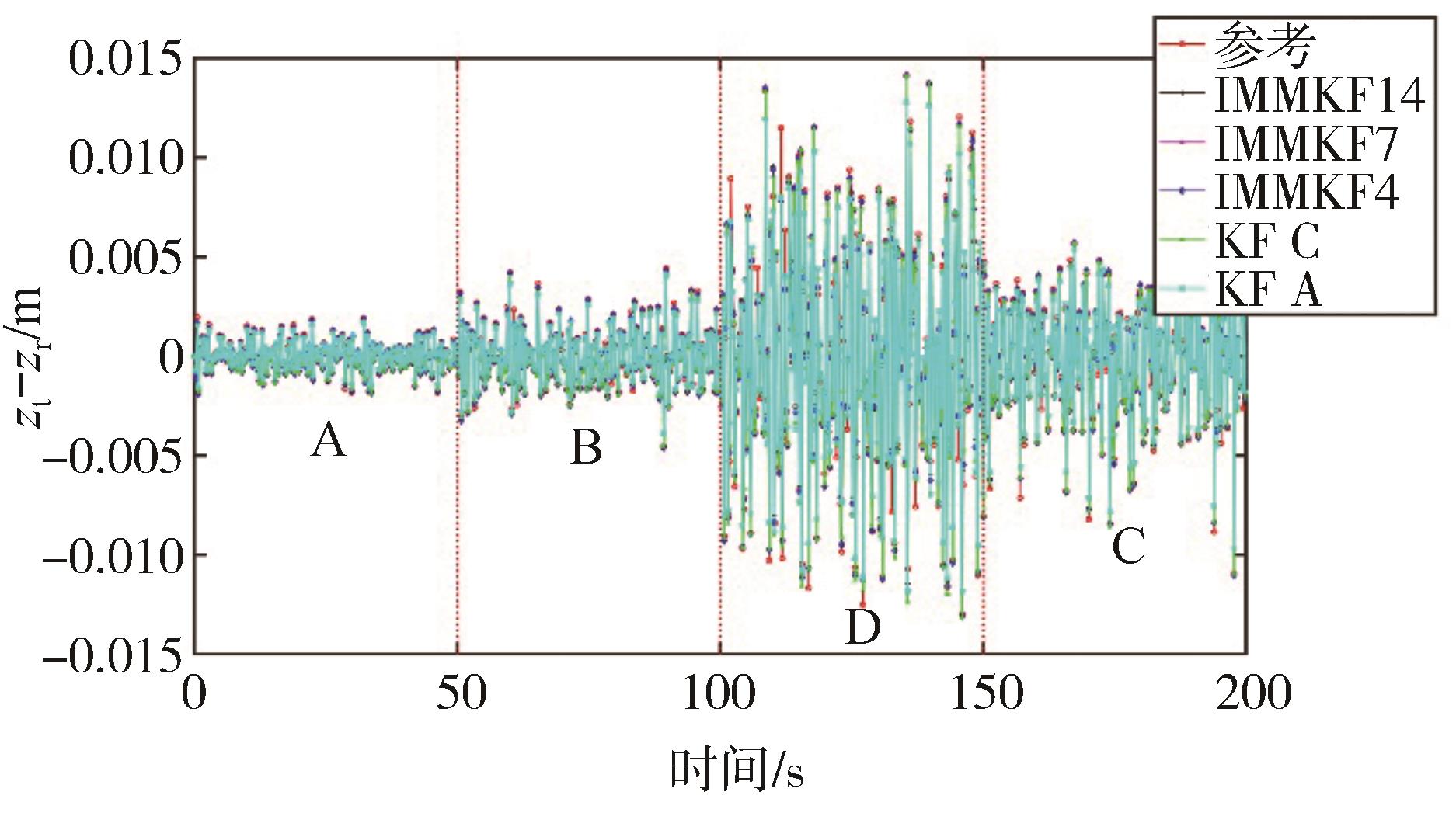
图18
z˙t结果误差"
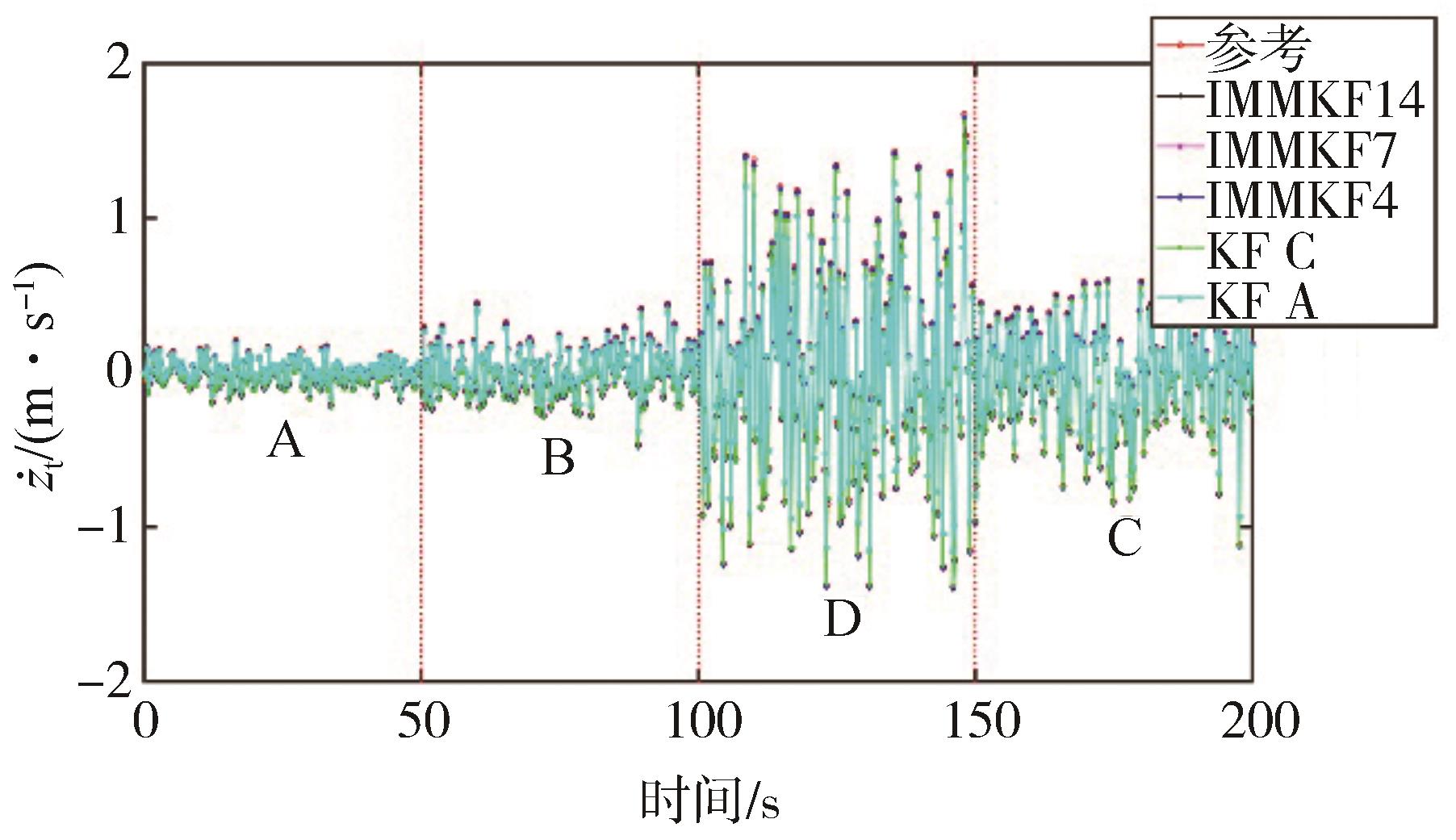
图19
z˙b结果误差(部分)"
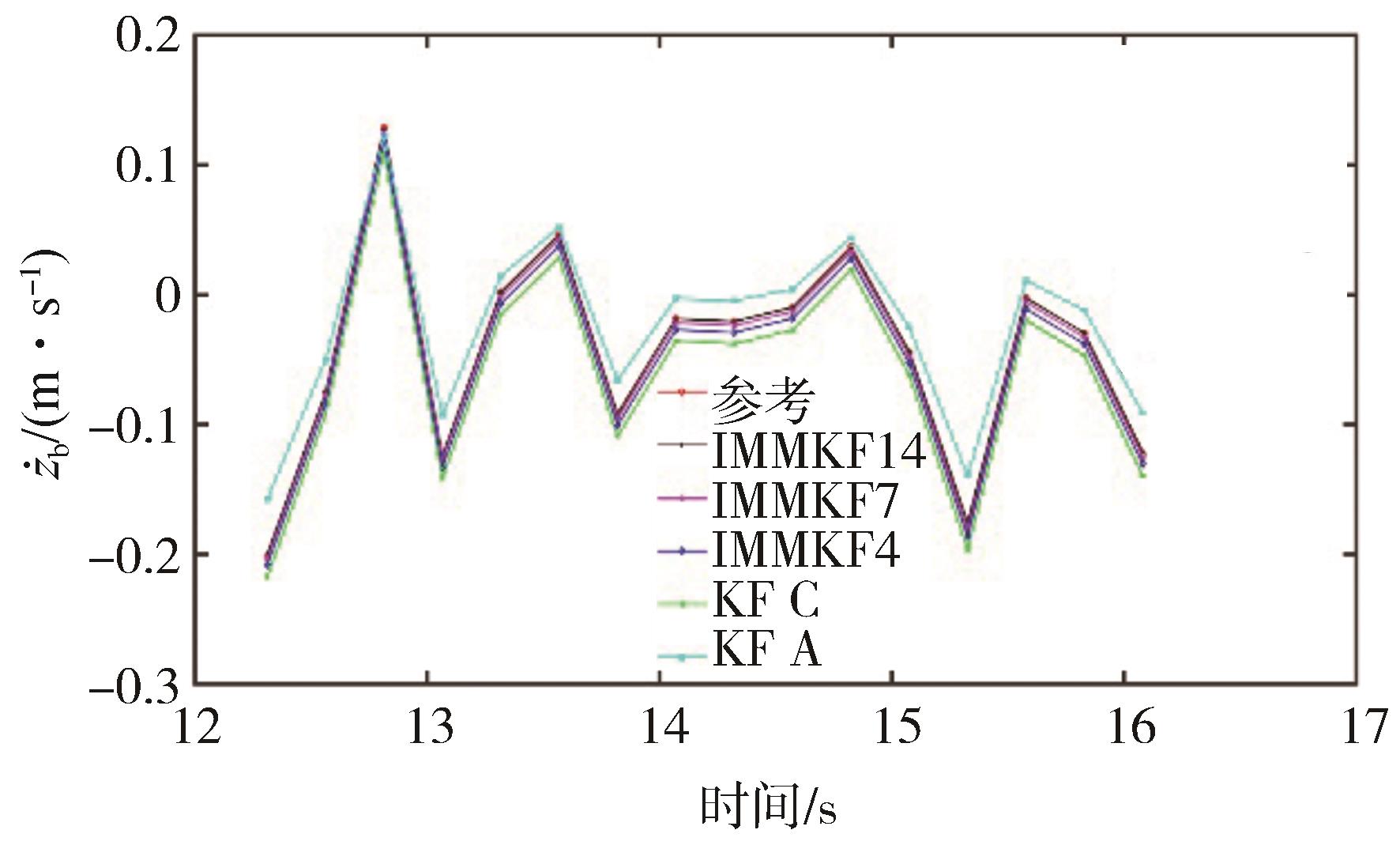
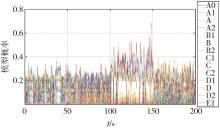
图20
IMMKF14观测器的混合概率"
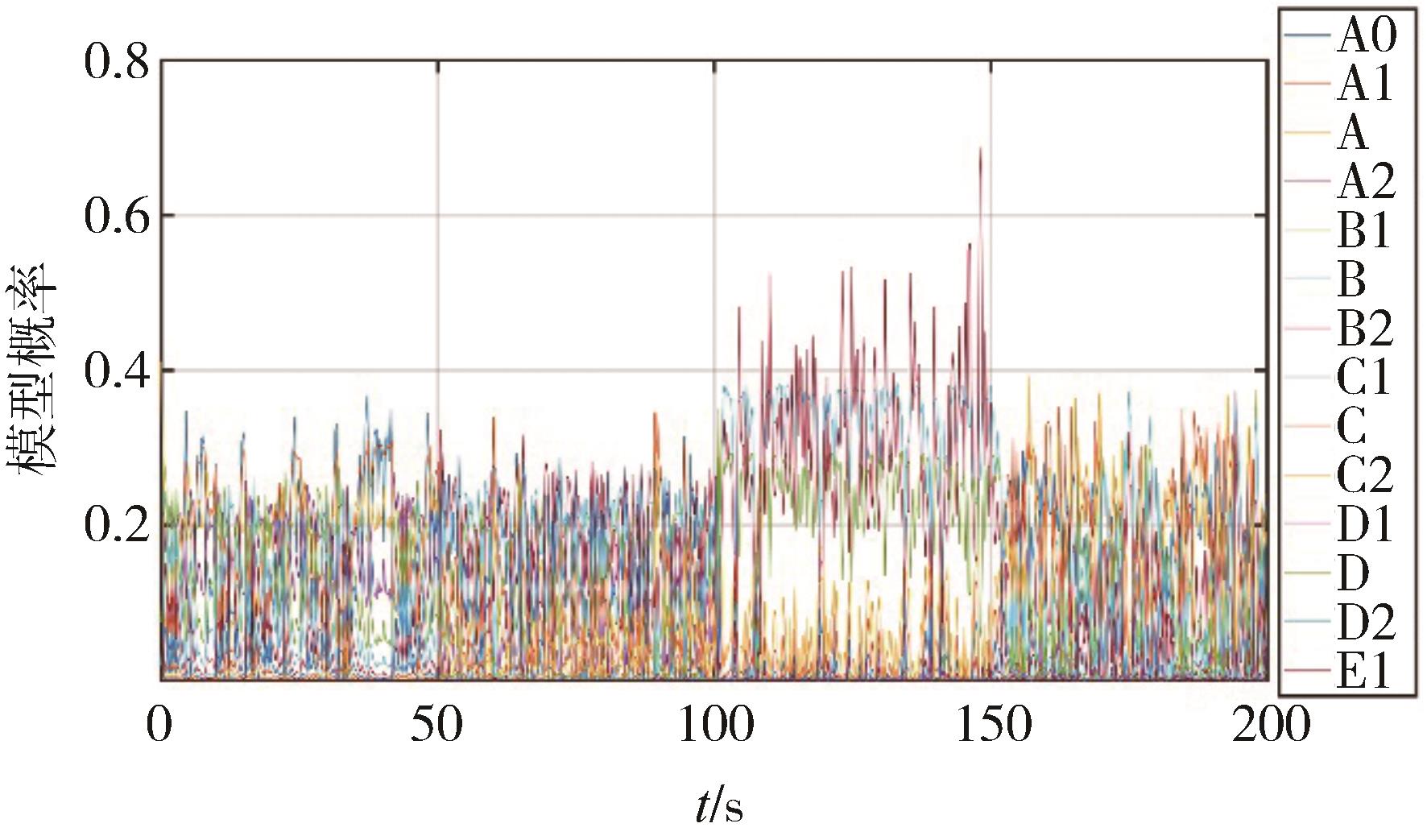
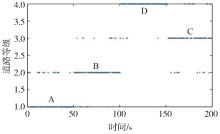
图21
采样步为1时的路面等级识别结果"
表6
路面等级识别正确率 %"
| 采样步数 | 模型 | A | B | C | D |
|---|---|---|---|---|---|
| 1 | IMMKF14 | 81.00 | 83.00 | 95.00 | 70.50 |
| IMMKF7 | 60.50 | 42.00 | 77.00 | 35.50 | |
| IMMKF4 | 84.50 | 83.00 | 96.50 | 67.50 | |
| 10 | IMMKF14 | 95.00 | 90.00 | 100.00 | 90.00 |
| IMMKF7 | 65.00 | 55.00 | 90.00 | 45.00 | |
| IMMKF4 | 90.00 | 85.00 | 100.00 | 70.00 | |
| 20 | IMMKF14 | 100.00 | 100.00 | 100.00 | 90.00 |
| IMMKF7 | 60.00 | 50.00 | 100.00 | 60.00 | |
| IMMKF4 | 100.00 | 90.00 | 100.00 | 80.00 |
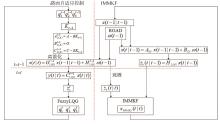
图22
基于IMMKF的自适应主动控制悬架控制流程图"
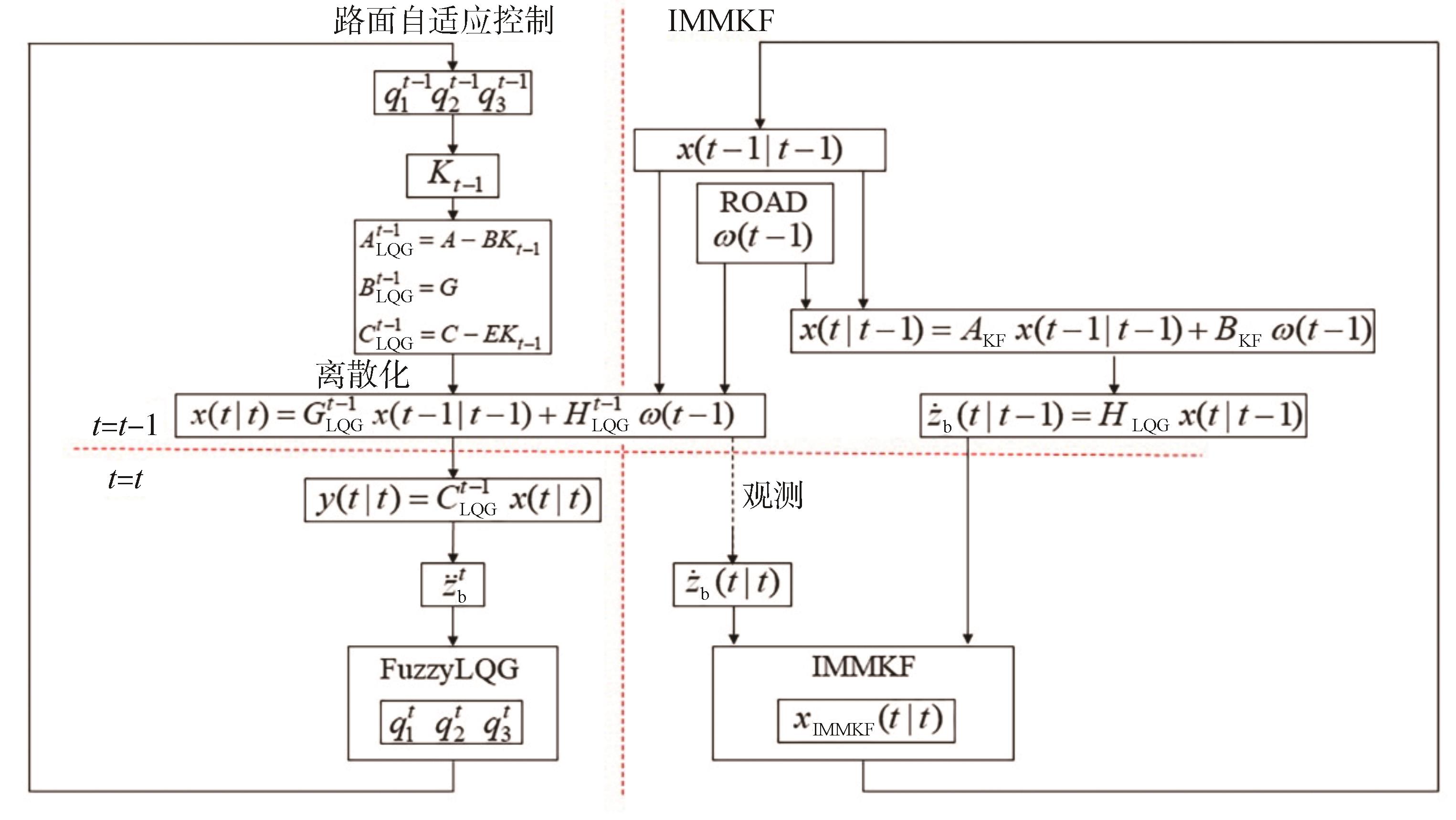
表7
各级路面仿真结果对比"
| 输出量 | 模型 | A | B | D | C |
|---|---|---|---|---|---|
| 被动 | 0.733 9 | 1.484 8 | 5.892 7 | 2.788 8 | |
| 主动 | 0.320 4 | 0.652 7 | 2.677 2 | 1.247 5 | |
| IMMKF | 0.286 2 | 0.483 5 | 1.414 7 | 0.800 3 | |
| 被动 | 0.012 1 | 0.024 6 | 0.097 8 | 0.047 0 | |
| 主动 | 0.003 4 | 0.006 8 | 0.027 5 | 0.013 4 | |
| IMMKF | 0.003 3 | 0.007 4 | 0.038 0 | 0.016 5 | |
| 被动 | 0.000 4 | 0.000 8 | 0.003 2 | 0.001 7 | |
| 主动 | 0.000 8 | 0.001 6 | 0.006 4 | 0.003 0 | |
| IMMKF | 0.000 7 | 0.001 4 | 0.005 9 | 0.002 8 |
图23
车身加速度仿真结果图"
图24
悬架动挠度仿真结果图"
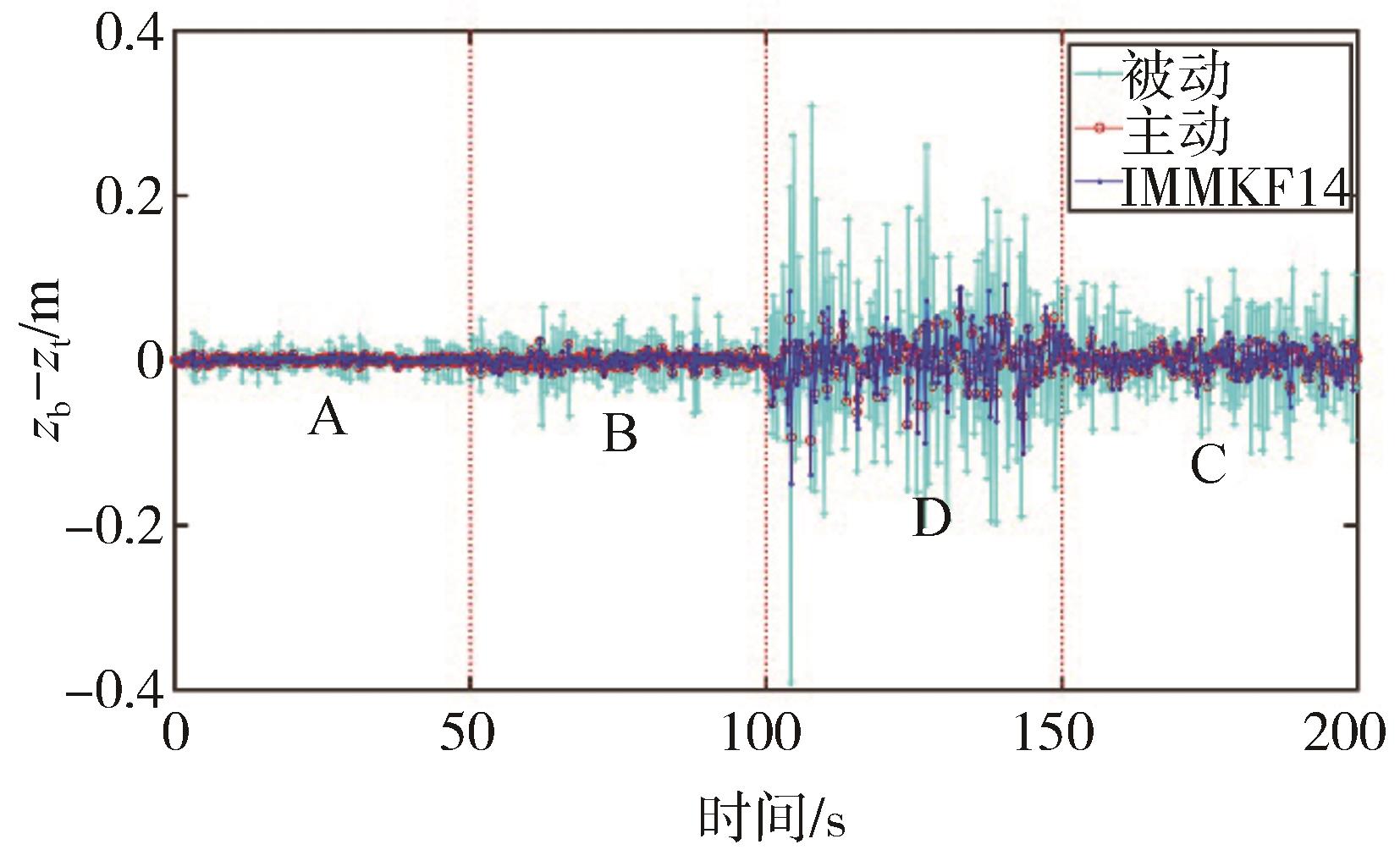
图25
轮胎动行程仿真结果图"
附表1
各级路面下的控制参数的平均值及QRV"
| 编号 | ||||
|---|---|---|---|---|
1.600 7 1.582 2 1.556 6 1.525 2 1.516 3 1.496 4 1.457 5 1.435 1 1.413 1 1.393 9 1.344 7 1.314 2 1.302 9 1.286 9 1.243 8 1.217 9 1.174 1 | 597 625 664 711 724 754 812 846 879 908 981 1 027 1 044 1 068 1 133 1 172 1 237 | 0.041 8 0.055 2 0.069 8 0.083 1 0.094 4 0.105 1 0.128 4 0.169 8 0.194 6 0.216 5 0.275 7 0.345 2 0.382 7 0.432 9 0.570 8 0.678 7 0.862 4 |
| 1 | BAGHERI A, REZAEE M, HASHEMI S M. Genetic algorithm based optimization of model reference adaptive control approach for a vehicle active suspension system[C]. 3rd Industrial Simulation Conference 2005, Fraunhofer-IPK, Berlin, Germany, Jun 09-11. Fraunhofer-IPK, Berlin, Germany, 2005: 211-215. |
| 2 | PANG H, ZHANG X, YANG J J, et al. Adaptive backstepping-based control design for uncertain nonlinear active suspension system with input delay[J]. International Journal of Robust and Nonlinear Control, 2019, 29 (16): 5781-5800. |
| 3 | ZHENG X Y, ZHANG H, YAN H C, et al. Active full-vehicle suspension control via cloud-aided adaptive backstepping approach[J]. IEEE Transactions on Cybernetics, 2020, 50 (7): 3113-3124. |
| 4 | YI K S, SONG B S. Observer design for semi-active suspension control[J]. Vehicle System Dynamics, 1999, 32 (2-3): 129-148. |
| 5 | DU M M, ZHAO D X, YANG M K, et al. Nonlinear extended state observer-based output feedback stabilization control for uncertain nonlinear half-car active suspension systems[J]. Nonlinear Dynamics, 2020, 100 (3): 2483-2503. |
| 6 | WANG T P, CHEN S Z, REN H B, et al. State estimation and damping control for unmanned ground vehicles with semi-active suspension system[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2020, 234 (5): 1361-1376. |
| 7 | WANG K Y, HE R, LI H, et al. Observer-based control for active suspension system with time-varying delay and uncertainty[J]. Advances in Mechanical Engineering, 2019, 11 (11). |
| 8 | YI K S, SONG B S. Observer design for semi-active suspension control[J]. Vehicle System Dynamics, 1999, 32 (2-3): 129-148. |
| 9 | WANG Z F, DONG M M, QIN Y C, et al. Suspension system state estimation using adaptive Kalman filtering based on road classification[J]. Vehicle System Dynamics, 2017, 55 (3): 371-398. |
| 10 | WANG T C, LI Y M. Neural-network adaptive output-feedback saturation control for uncertain active suspension systems[J]. IEEE Transactions on Cybernetics, 2022, 52 (3): 1881-1890. |
| 11 | WANG Z F, QIN Y C, GU L, et al. Vehicle system state estimation based on adaptive unscented Kalman filtering combing with road classification[J]. IEEE Access, 2017, 5: 27786-27799. |
| 12 | ZHANG Z P, XU N, CHEN H, et al. State observers for suspension systems with interacting multiple model unscented Kalman filter subject to markovian switching[J]. International Journal of Automotive Technology, 2021, 22 (6): 1459-1473. |
| 13 | KAVIANIPOUR O, MONTAZERI-GH M, MOAZAMIZADEH M. Road profile measurement using the two degrees of freedom response-type mechanism[J]. Proceedings of the Institution of Mechanical Engineers Part C: Journal of Mechanical Engineering Science, 2015, 229 (6): 1074-1087. |
| 14 | IMINE H, FRIDMAN L. Road profile estimation in heavy vehicle dynamics simulation[J]. International Journal of Vehicle Design, 2008, 47 (1-4): 234-249. |
| 15 | MOTAMEDI M, TAHERI S, SANDU C, et al. Characterization of road profiles based on fractal properties and contact mechanics[J]. Rubber Chemistry and Technology, 2017, 90 (2): 405-427. |
| 16 | YOUSEFZADEH M, AZADI S, SOLTANI A. Road profile estimation using neural network algorithm[J]. Journal of Mechanical Science and Technology, 2010, 24 (3): 743-754. |
| 17 | ZHANG D J, XU X, LIN H, et al. Automatic road-marking detection and measurement from laser-scanning 3D profile data[J]. Automation in Construction, 2019, 108. |
| 18 | LEE J H, LEE S H, KANG D K, et al. Development of a 3D road profile measuring system for unpaved road severity analysis[J]. International Journal of Precision Engineering and Manufacturing, 2017, 18 (2): 155-162. |
| 19 | QIN Y C, LANGARI R, GU L. The use of vehicle dynamic response to estimate road profile input in time domain[C]. ASME 7th Annual Dynamic Systems and Control Conference, San Antonio, TX, Oct 22-24. San Antonio, TX, 2014. |
| 20 | QIN Y C, DONG M M, LANGARI R, et al. Adaptive hybrid control of vehicle semiactive suspension based on road profile estimation[J]. Shock and Vibration, 2015, 2015. |
| 21 | CHEN S, XUE J J. Road roughness level identification based on BiGRU network[J]. IEEE Access, 2022, 10: 32696-32705. |
| 22 | LIU Y J, CUI D W. Research on road roughness based on NARX neural network[J]. Mathematical Problems in Engineering, 2021, 2021. |
| 23 | ZHANG Q X, HOU J L, HU X Y, et al. Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests[J]. Measurement, 2022, 199. |
| 24 | BOTSHEKAN M, ASAADI E, ROXON J, et al. Smartphone-enabled road condition monitoring: from accelerations to road roughness and excess energy dissipation[J]. Proceedings of the Royal Society A-Mathematical Physical and Engineering Sciences, 2021, 477 (2246). |
| 25 | HUANG W J, SU N C. A study of generalized normal distributions[J]. Communications in Statistics-Theory and Methods, 2017, 46 (11):5612-5632. |
| [1] | 查云飞,石小山,吴昊,李敏旭,陈慧勤. 基于主动倾斜式尾翼的车辆气动特性研究[J]. 汽车工程, 2023, 45(3): 489-500. |
| [2] | 刘晋霞,梁志豪,王强,温明星. TTR汽车等效燃油消耗最小的能量管理策略研究[J]. 汽车工程, 2023, 45(2): 285-292. |
| [3] | 张新荣,王鑫,宫新乐,黄晋,黄丹,王鹏兴. 面向智能车辆的路面附着系数分段识别方法[J]. 汽车工程, 2023, 45(10): 1923-1932. |
| [4] | 潘世举,李永乐,李子先,何滨兵,朱愿,徐友春. 基于改进纯跟踪的智能车路径跟随方法[J]. 汽车工程, 2023, 45(1): 1-8. |
| [5] | 刘永涛,刘传攀,刘湘安,陈轶嵩,乔洁. 基于自适应采样时间MPC的自动紧急制动系统[J]. 汽车工程, 2023, 45(1): 32-41. |
| [6] | 关龙新,顾祖飞,张超,王爱春,彭晨若,江会华,吴晓建. 考虑系统复杂扰动的智能车模型预测路径跟踪控制[J]. 汽车工程, 2022, 44(12): 1844-1855. |
| [7] | 殷学冰,陈勇,代青林,刘海,田乃利,贺伯林. 基于NSGA-Ⅱ算法和模糊控制的纯电动汽车2DCT换挡规律研究[J]. 汽车工程, 2022, 44(10): 1571-1580. |
| [8] | 郭祥靖,孙攀,邓杰,刘勇,刘壮,刘双平. 基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J]. 汽车工程, 2021, 43(9): 1350-1359. |
| [9] | 彭博, 李军求, 孙逢春, 朱学斌, 万存才. 多轴分布式电驱动车辆后桥差动转向控制策略研究*[J]. 汽车工程, 2020, 42(7): 909-916. |
| [10] | 王宏朝, 单希壮, 杨志刚. 矩阵风扇冷却系统模糊控制的研究*[J]. 汽车工程, 2020, 42(3): 345-352. |
| [11] | 马瑞海, 王丽芳, 张俊智, 何承坤. 基于滑模自抗扰的电制动系统动态负载模拟*[J]. 汽车工程, 2020, 42(2): 141-148. |
| [12] | 陈浩, 袁良信, 孙涛, 郑四发, 连小珉. 电动轮汽车车速与道路坡度估计*[J]. 汽车工程, 2020, 42(2): 199-205. |
| [13] | 张炳力, 李子龙, 沈干, 方涛, 曹聪聪, 郑平平. 基于模糊神经网络的智能汽车轨迹跟踪研究*[J]. 汽车工程, 2019, 41(8): 953-959. |
| [14] | 姚堤照, 谢长君, 曾甜, 黄亮. 基于多模糊控制的电电混合汽车能量管理策略*[J]. 汽车工程, 2019, 41(6): 615-624. |
| [15] | 王峰, 罗玉涛. 基于工况预测的复合储能系统功率分配策略研究*[J]. 汽车工程, 2019, 41(11): 1251-1257. |
|